微型计算机控制技术于海生60页PPT
- 格式:ppt
- 大小:6.05 MB
- 文档页数:30
精品课程《微型计算机控制技术》电子教案PPT课件(全)第一章:微型计算机控制技术概述1.1 课程介绍了解《微型计算机控制技术》的课程目标和意义。
掌握课程的主要内容和教学方法。
1.2 微型计算机控制技术基本概念解释微型计算机控制技术的定义。
探讨微型计算机控制技术的发展历程和应用领域。
1.3 微型计算机控制系统组成分析微型计算机控制系统的硬件和软件组成。
了解输入/输出设备、控制器、执行器等主要组成部分的功能。
1.4 微型计算机控制技术的关键技术探讨微型计算机控制技术中的关键技术和算法。
了解数字信号处理、模拟/数字转换、PID控制等核心技术。
第二章:微型计算机控制系统的硬件设计2.1 控制器硬件设计基础分析控制器硬件设计的基本要求和原则。
掌握控制器硬件设计的步骤和注意事项。
2.2 控制器硬件选型了解常用控制器硬件的选择标准。
掌握控制器硬件选型的方法和依据。
2.3 控制器硬件电路设计实例分析具体的控制器硬件电路设计实例。
学习如何设计控制器硬件电路,并进行仿真和测试。
2.4 控制器硬件调试与优化探讨控制器硬件调试和优化的方法和技巧。
学习如何解决控制器硬件设计和实施过程中出现的问题。
第三章:微型计算机控制系统的软件设计3.1 控制器软件设计基础分析控制器软件设计的基本要求和原则。
掌握控制器软件设计的步骤和注意事项。
3.2 控制器软件选型了解常用控制器软件的选择标准。
掌握控制器软件选型的方法和依据。
3.3 控制器软件编程语言介绍常用的控制器软件编程语言。
学习如何选择合适的编程语言进行控制器软件开发。
3.4 控制器软件开发实例分析具体的控制器软件开发实例。
学习如何进行控制器软件开发,并进行调试和优化。
第四章:PID控制算法及其实现4.1 PID控制算法概述解释PID控制算法的定义和原理。
探讨PID控制算法的优点和局限性。
4.2 PID控制算法的数学模型分析PID控制算法的数学模型。
学习如何建立和求解PID控制算法的数学模型。
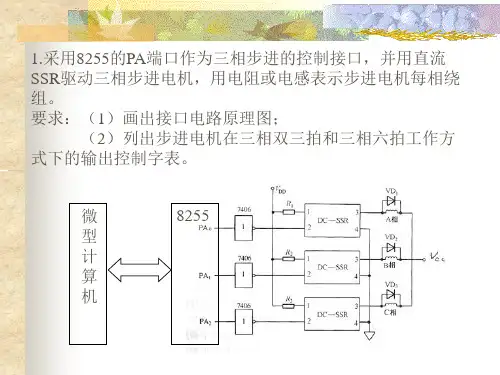


1.12 1.2 1.212DDS3SCC4DCS5FCSDCS1.411234--521231234562.12.2 74LS24474LS273PC8819 2.1 2.2portMOV DX portIN AL , DXMOV AL , DATAMOV DX , portOUT DX AL2.3 8A/D ADC08098255A PC8828 2.158ADC0809 PROC NEARMOV CX , 8CLDMOV BL , 00HLEA DI , DATABUFNEXT: MOV DX , 02C2HMOV AL , BLOUT DX , ALINC DXMOV AL , 00000111B //OUT DX , ALDEC DXNOSC: IN AL , DXTEST AL , 80HJNZ NOSC //NOEOC: IN AL ,DXTEST AL ,80HJZ NOEOC // EOC=0MOV DX , 02C0H //IN AL , DXSTOS DATABUFINC BL //LOOP NEXTRETADC0809 ENDP2.5 I/V I/V32 2.191R3AC5R31 2.18CD5V D2R2R5V2.6T0T2T kTA/DA/D2.7A/D2.8 8A/D100s A/D0.4%6.4Zf H2.9 8255A AD574LF398CD4051PC8836 2.258255A2C0H2C3H8255A DS ES BUF837 2.26AD574A PROC NEARCLDLEA DI , BUFMOV BL , 00000000B //MOV CX , 8ADC : MOV DX , 2C2HMOV AL , BLOUT DX , ALNOPNOPOR AL , 01000000B OUT DX , ALAND AL , 10111111B OUT DX , AL MOV DX , 2C0HPULLING: IN AL , DXTEST AL , 80H JNZ PULLING MOV AL , BLOR AL , 00010000B MOV DX , 2C2H OUT DX , ALOR AL , 01000000B OUT DX , AL MOV DX , 2C0H IN AL , DX AND AL , 0FH MOV AH , AL INC DXIN AL , DX STOSW INC BL LOOP ADCMOV AL , 00111000B MOV DX ,2C2H OUT DX , AL RETADC574A ENDP 2.10 DAC0832PCD/A412.29DAC0832200H,8 2 6DHMOV DX 200H MOV AL 6DH OUT DX AL HLT 2.12D/AD/A442.331OUT V DREFV nD/A1*2OUT REF nDV V 2OUT V 32112(*)OUT REF OUT REF R V V V V R 2.13DAC0832CD4051PC 88482.408BUF0BUF78DSDOUT PROC NEARMOV BX , OFFSET BUFNEXT: MOV AL , [BX]OUT DX , AL INC DX OUT DX , AL CALL DELAY INC AH DEC DX LOOP NEXT RETDOUT ENDPDELAY4.11D S2T3D SD Z454.2()D s DZsD s1211()11T z T z D z T z Tz()()()U z D z E z 112211()(2)(2)()()(2)(2)()U z TT T T z U z E z TT T T z E z 112()2)()(2)(1)(2)(1)]u k TT e k TT e k TT u k sD s()D z 11221()[()()(1)()(1)]u k T e k T T e k T T u k T sDs()D z211()(1)()()(1)]u k T u k T T e k T e k 4.3PIDPID()[()()p Du k K e k k T PID(1)[(1)()()()(1)P Du k K e k i T u k u k u k PID1234.4()()()U s D s E s T=0.2SC()()()U s D s E s()()t t()(),[0.2]k e k Ts m=0.085()(()(1)(1)((1)(2)()()(1)(1)(()((1)u k k k k u k k k k u k u k u k u k u k e k e k k ()0.298[(1)(2)] 1.298[()(2)] 1.895(1)u k u k u k e k e k e k 4.5123110()0()()u k u k u u ku PID1(1)u k u ()0e k ()e k 1(1)uku ()0e k 1z12()atf t e 2()F s 12()akTf k e 222()1aT aTaT e z F z ee z2()F s 2()2ttf t ee2()2()kTkTf k e eF z2z1()F z 2()F z 1Z1113115()0.813115z F z z z22211()(1)(2)zF z z zz z z3()F z 2(0)lim () 1.6z f F z 111()lim(1)()0z zf z F z 4z(2)4(1)3()2(0)(1)0y k y k y k ky y 5z1()G s 211()()()(1()()()(1TsTse G s k k ka b a b a b ab e k k ka ab b a b ab G z z 2()G z 4.61A/D,D/A234564.7PID(1) (2)1IT 180%IT (3)DT 012PkT 3DDC4,,,p I DT K T T 123c,,,p I DT K T T 4.81()G z 2([()()]()]G z H s G s Z s3(D z 4()D z 10101(()()()()()()mi ii mn iii i i i mni i i i bz D z U z bz E z az U z u k be k i au k i 4.9(c G s 1T s1()D z ()y k ()u k ()e k2()D z ()y k ()u k ()e k : (1)1()(1)11G z Z z Z 0,0,1,1,11d u v j q j q m u d u v j q 11()(11Tz z r t t R z 1111()1()[1](1)()1v jq e i i i z z a z z F z z 112112111()1()1,()()e z z z f z f z z z z D z1()()()(1110()01,2,.....e E z z R z z k e k k1()()()00()11,2,...z Y z R z z k y k k ()()()1()0,1,2,...9k U z E z D z u k k2(1G z 0,1,0,2,1d v w q j j q 12mw d n v j q ()()()1r t t R z 12122122212212()(1)()()1() 2.1()2e e z z z f zf z z z f f z z z1121()D z z121()()()(1)()(1)e E z z R z z z e k k 234()()()234...00,1()2,3,...Y z R z z z z z k y k kk 1()()()()0.1*(1)k U z E z D z u k kThis document was created with Win2PDF available at . The unregistered version of Win2PDF is for evaluation or non-commercial use only.。