- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
15
第三阶段:
f 3 s 3 max r3 s 3 , x 3 f 4 s4 max r3 s 3 , x 3 .
x 3 s3 x 3 s3
s 3 0,1,2,3,4,5;
表9-6
x3 s3
0 1 2 3 0 0 — — — 1 — 4 — —
函数值之和中的最小值.
f k s k min rk s k , x k f k 1 s k 1 , k n, n 1,,2,1 边界条件 : f n1 s n1 0. r2 B1 , C 1 f 3 C 1 f 2 B1 min r2 B1 , x 2 f 3 s 3 min r2 B1 , C 2 f 3 C 2 如: r B , C f C 3 3 2 1 3 2 12 14 min 1 11 min 12 12. 6 11 17
12
§3.动态规划应用
建立动态规划模型必须做到一下几点: 1. 根据时间或空间的自然特性将实际问题恰当地划分为若干个 阶段,即把问题的过程转化为多阶段决策过程. 2.正确的选择状态变量sk,使它既能描述过程的演变特征,又要 满足无后效性(到达这个状态前的决策将不影响到该状态以后的 决策). P7 3.确定决策变量xk. 4.正确写出状态转移方程
1
§1.多阶段决策过程最优化问题举例
最优化原理 作为整个过程的最优策略应具有这样的性质,即无论 过去的状态和决策如何,对于前面的决策所形成的状态而言, 余下 的诸决策必须构成最优策略. 最短路径问题:
最优化原理在最短路上的应用可阐述如下: 从最短路上的每一点到终点的部分道路,也一定是从该点到 终点的最短路.
s 3 T2 s 2 , x 2 s 2 x 2 .
而且,有 s 3 x 3 .
f k s k max rk s k , x k f k 1 s k 1 , k 3,2,1. xk 边界条件 : f 4 s 4 0.
甲 厂
乙 厂
丙 厂
14
P18 P17 P16
解: 将问题按工厂分为三个阶段,甲、乙、丙三厂分别编号为 1、2、3厂。并设
sk 分配给第k个工厂至第3个工厂的设备的台数k 1,2,3). ( xk 分配给第k个工厂的设备台的数k 1,2,3). (
显然:s1 5.
s 2 T1 s1 , x1 s1 x1 ,
2
例1.如图9-1,给定一个运输网络,两点之间连线上的数字表示 两点间的距离,试求一条从A到E的运输线路,使总距离为最短. B1 2 1 6 4 B2 7 2 4 8 B3 3 75 B4 1
4 A 3 3 2
C1
8 6
7 C2 5 1 C3 6
D1 10
6 D2 E
图9-1
3
P5 P6
4 A 3 3 2
阶段1 本阶段始 点(状态) A 本阶段各终点(决策) B2 B3 3+13=16 3+14=17 到E的 本阶段最优 终点 最短 距离 (最优决策) 14 B4
6
B1 4+12=16
B4 2+12=14
此问题的最短路:
A
B4
C3
D1
E
P10
这段路的长度为: 14 . 利用动态规划的方法,不仅求出了全过程的最短路,还求出了图 上任意一点到E的最短路.
9
P7
5.指标函数
指标函数是衡量全过程策略或k子过程策略优劣的数量指标, 最优指标函数: 指标函数的最优值.记作 f 1 s1 或f k s k . 全过程最优指标函数.
k子过程最优指标函数. 例 1中的指标指的是从某点到终点的距离, 最优指标是从某 点到终点的最短距离.
f k s k
f 2 s 2
0 5 10 14 16
x2
0 1 2 2 1,2
5
0+12
5+12
10+11
11+6
11+4
11+0
21
2
17
P14
第一阶段: s1 5; s2 s1 x1 5 x1 ,
0 x1 s1
f 1 s1 max r1 s1 , x1 f 2 s 2 max r1 5, x1 f 2 5 x1
f 1 s1
如:
f 1 s1 f 1 A 14; f 2 B2 13;3 11.
阶段指标函数(阶段效益) rk s k , x k : 表示在第k阶段的sk状态下 做出xk决策的指标值.
如: r1 A, B1 4; r2 B3 , C 2 8; r4 D1 , E 10.
r3 s 3 , x 3
2 — — 6 — 3 — — — 11 4 — — — — 5 — — — —
f 3 s 3
0 4 6 11
x3
0 1 2 3
4 5
— —
— —
— —
— —
12 —
— 12
12 12
4 5
16
P14
第二阶段:
f 2 s 2 max r2 s 2 , x 2 f 3 s 3 max r2 s 2 , x 2 f 3 s 2 x 2
0 x 2 s 2 0 x 2 s 2
s 2 0,1,2,3,4,5;
s3 s2 x2 ,
表9-7
x2 s2
0 1 2 3 4 0 0+0 0+4 0+6 0+11 0+12
r2 s 2 , x 2 f 3 s 2 x 2
1 — 5+0 5+4 5+6 5+11 2 — — 10+0 10+4 10+6 3 — — — 11+0 11+4 4 — — — — 11+0 5 — — — — —
B1 2 1 6 4 B2 7 2 4 8 B3 3 75 B4 1
四阶段决策过程最优化问题 C1 7 C2 5 1 C3 6 8 6 D1 10
D2
6
E
四个弧远的点(E)为终点.
4
逆序解法:(P187中) 第四阶段: 阶段4
P7 P3
本阶段始点 本阶段各终点(决策) 到E的最短 本阶段最优终点 (最优决策) 距离 E (状态) D1 10 10 E D2 6 6 E 第三阶段: 阶段3
s k 1 Tk s k , x k .
13
5.正确写出指标函数.
一.资源分配问题 例2.某公司拟将某种设备5台,分配给所属的甲、乙、丙三个 工厂,各工厂获得此设备后,预测可以创造的利润如表9-5所示,问 这5台设备应如何分配给这3个工厂,使得所创造的总利润为最大? 表9-5 盈利 设备台数 0 1 2 3 4 5 0 3 7 9 12 13 0 5 10 11 11 11 0 4 6 11 12 12 工厂
本阶段始点 (状态) C1 C2 C3
本阶段各终点(决策) D1 D2 8+10=18 6+6=12 7+10=17 5+6=11 1+10=11 6+6=12
到E的 本阶段最优终点 (最优决策) 最短距离 12 D2 11 D2 11 D1 5
第二阶段:
阶段2 本阶段始 点(状态) 本阶段各终点(决策) C2 C3 到E的最 短距离
p1,4 s1 x1 A B4 ; x2 B4 C3 ; x3 C3 D1; x4 D1 E
k子过程策略:从第k阶段开始到最后阶段的决策组成的决策 序列称为k子过程策略,简称k子策略.记为 pk ,n sk . 如:
p2,4 s1 x2 B2 C1; x3 C1 D1; x4 D1 E
阶段: 第一阶段: 以A点为始点,而以距离A点正好一个弧远的点(B1,B2, B3,B4)为终点; 第二阶段: 以距离A点正好一个弧远的点(B1,B2,B3,B4)为始点,以 距离A点正好两个弧远的点(C1,C2,C3)为终点; 第三阶段: 以距离A点两个弧远的点(C1,C2,C3)为始点,以距离A点 三个弧远的点(D1,D2)为终点; 第四阶段: 以距离A点三个弧远的点(D1,D2)为始点,以距离A点
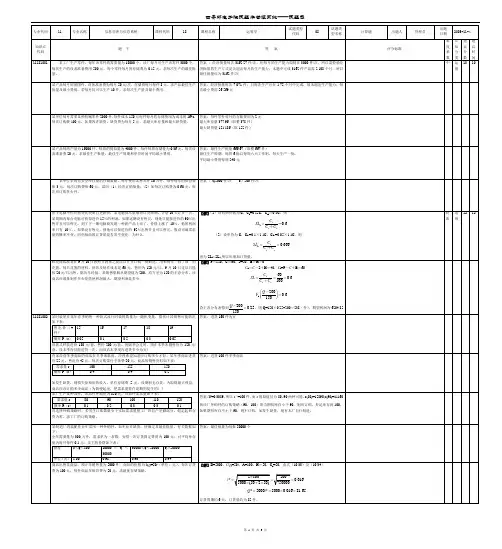
第十章 动态规划
动态规划(Dynamic progroming)是运筹学的一个重要分支, 是解决多阶段决策过程最优化的一种量化方法.这种方法把困难 的多阶段决策问题变换成一系列互相联系较容易的单阶段问题, 是由美国学者贝尔曼(R.Bellman)所建立的. 动态规划的成功之处在于, 它可以把一个n维决策问题转化 为n个一维最优化问题,一个一个的解.另外动态规划还能求出全 局极大和极小. 用动态规划可以解决管理中的最短路问题、装载问题、库 存问题、资源分配问题、生产过程最优化问题。
0 x1 5
表9-8
x1 s1
5 0 0+21 1 3+16
r1 5, x1 f 2 s1 x1
2 7+14 3 9+10 4 12+5 5 13+0
10
P6
6.状态转移方程 已知第k+1阶段的状态是由第k阶段的状态和第k阶段的决策 所决定的,将这种关系用方程的形式表示为 在sk的状态下,在所有做出的各种 决策xk中,取一个第k阶段的指标值 s k 1 Tk s k , x k rk(sk,xk)与k+1子过程的最优指标 如: s 3 C 1 T2 B2 , C 1 . 二.基本方程 k子过程与k+1子过程最优指标函数有如下递推关系: