SkyTEM——一种新的高分辨率直升飞机瞬变电磁法观测系统
- 格式:docx
- 大小:21.11 KB
- 文档页数:3

风流一代·青春进入风洞,你也可以飞■文/祝师基至IN 生活悦玩人没有翅膀,如何才能平地飞起?或许,有人说这只有在武侠小说里才能看到。
其实不然,现在一个普通的人只要借助一种SKY DIVE 户外风洞飞行装置,就能轻松实现“飞行梦”。
风洞是进行空气动力实验最常用、最有效的工具,过去多用在飞机测试或宇航员的训练上,现在可以轻松应用于民用娱乐方面。
这种装置底部是略有弹性的铁丝网,其下有数台鼓风机产生瞬间风力,将人高高托起。
一般而言,时速180千米的风力就能将一个成年人稳稳托住,而连接风洞的鼓风机可以在瞬间为风洞提供时速达250千米的大风。
这样一来,没有飞行经验的你被风洞吹起,完全能实现在空中自由翱翔的梦想。
娱乐风洞“叩门”中国今年38岁的贝塔斯此前是一名特技表演人员,2000年在美国接触到了风洞,他被那惊险刺激的飞行模式深深地吸引,于是开始幻想自己以后从事与之相关的事业。
2004年他在拉脱维亚成立Aerodium 公司,次年建立了第一座娱乐风洞。
为了让风洞表演更加安全,贝坦斯常常一边抱着笔记本电脑进行理论知识学习,一边做着模拟实验。
2006年,贝塔斯迎来了极好的风洞展示机会。
这年,在都灵举办的冬奥会闭幕式上,Aerodium 公司的风洞可谓出尽了风头,当时媒体这样说:“贝塔斯带领他的团队使得这场表演得到了5亿人的关注,一下子让风洞这项娱乐被很多人知晓。
”据说,这场表演之后,贝塔斯先后建立了20多座风洞,大约是全球市场的五分之一,包括在保加利亚的阳光海滩、泰国的芭堤雅、拉脱维亚的锡古达尔等地,娱乐了大约100万人。
对此,贝塔斯自豪地说:“我们改变了这个行业,也改变了娱乐的历史。
”为了赢得更多普通人对风洞娱乐项目的青睐,在公司研发人员的努力下,Aerodium 陆续拥有了迷你风洞、移动开放式风洞、完全开放式风洞、开放式的专业风洞和封闭环流风洞等不同类型、不同规格、不同体验的风洞。
这些风洞在游乐场、购物中心、体育场和其他地点,在炎热、潮湿、干燥或过冷的气候中照样可以运作自如,使得人们在任何地点、任何时间都可以无拘无束地享受这项极限运动带来的刺激。
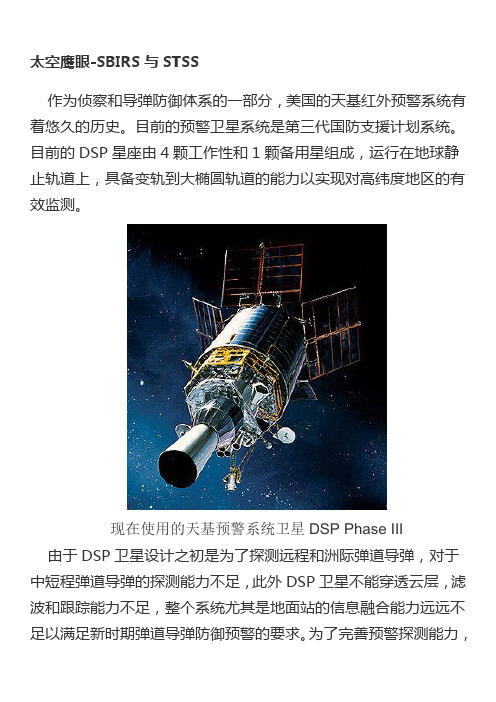
太空鹰眼-SBIRS与STSS作为侦察和导弹防御体系的一部分,美国的天基红外预警系统有着悠久的历史。
目前的预警卫星系统是第三代国防支援计划系统。
目前的DSP星座由4颗工作性和1颗备用星组成,运行在地球静止轨道上,具备变轨到大椭圆轨道的能力以实现对高纬度地区的有效监测。
现在使用的天基预警系统卫星DSP Phase III由于DSP卫星设计之初是为了探测远程和洲际弹道导弹,对于中短程弹道导弹的探测能力不足,此外DSP卫星不能穿透云层,滤波和跟踪能力不足,整个系统尤其是地面站的信息融合能力远远不足以满足新时期弹道导弹防御预警的要求。
为了完善预警探测能力,美国国防部启动了天基红外系统(SBIRS)以取代DSP系统提供导弹预警等功能,同时为了实现对弹道中段目标的探测识别,增加了继承自星球大战亮眼(Brilliant Eyes)低轨道星座,由此形成了SBIRS-High和SBIRS-Low的高低轨道复合型星座配置。
SBIRS的早期规划里,计划高轨道部分配置4颗静止轨道卫星和2颗高椭圆轨道卫星,主要用于探测和跟踪助推段的弹道导弹;低轨道部分配置约24颗卫星,轨道高度约1600公里,用于捕获,跟踪飞行中段的弹道导弹,分辨诱饵和弹头,为拦截器提供目标精确定位。
SBIRS-High和STSS. STSS可以做到全程跟踪探测2001年,随着SBIRS-Low系统由美国空军移交给弹道导弹防御局,系统改称太空跟踪与监视系统(STSS),现在所称的SBIRS系统一般特指原有的SBIRS-High。
红外传感器采用双探测器方案,每颗高轨道卫星安装一台宽视场的高速扫描探测器和窄视场凝视跟踪探测器,通过两者的结合,使SBIRS卫星的扫描速度和灵敏度远远高于DSP卫星,同时覆盖面积也大得多。
高轨道卫星之间本身不进行通信,不过可以和低轨道进行相互通信以做到接力跟踪。
STSS 卫星分布在三个不同平面的太阳同步轨道上,这些低轨道卫星装备了宽视场扫描探测器和窄视场凝视多光谱探测器。

序基于性能的导航(PBN)是国际民航组织(ICAO)在整合各国区域导航(RNA V)和所需导航性能(RNP)运行实践和技术标准的基础上,提出的一种新型运行概念。
它将飞机先进的机载设备与卫星导航及其他先进技术结合起来,涵盖了从航路、终端区到进近着陆的所有飞行阶段,提供了更加精确、安全的飞行方法和更加高效的空中交通管理模式。
PBN是飞行运行方式的重大变革,能有效促进民航持续安全,增加空域容量,减少地面导航设施投入,提高节能减排效果,是我国从航空大国向航空强国迈进,建设新一代航空运输系统的核心技术之一。
中国民航局决定按照ICAO的有关要求和亚太地区实施规划,加快这项技术的应用,组织全面实施。
本路线图结合我国实际情况,明确了中国民航从当前到2025年期间实施PBN的政策和总体工作计划,为各利益相关方提供指南,促进全球标准统一和国际合作。
希望有关各方在该路线图的具体实施过程中,提出修正意见,使之不断更新完善,适应中国民航快速发展的需求,并成为中国民航航行新技术发展的标志性规划和国际航空界的蓝图范本。
民航局PBN实施领导小组组长目录1. 背景..................................................................................................................................- 1 -1.1 PBN概念..................................................................................................................- 1 -1.2 作用及优势.............................................................................................................- 2 -1.3 ICAO要求................................................................................................................- 2 -2. PBN实施路线图目的.......................................................................................................- 3 -2.1 明确决策和计划.....................................................................................................- 3 -2.2 帮助沟通和理解.....................................................................................................- 3 -2.3 确立职责和分工.....................................................................................................- 3 -3. 中国民航运输系统..........................................................................................................- 4 -3.1 现状.........................................................................................................................- 4 -3.2 挑战.........................................................................................................................- 4 -3.3 未来发展.................................................................................................................- 6 -4. 实施具体工作..................................................................................................................- 7 -4.1 总体目标.................................................................................................................- 7 -4.2 关键任务.................................................................................................................- 7 -4.2.1 规章标准的制定...........................................................................................- 7 -4.2.2 航路规划和飞行程序设计...........................................................................- 7 -4.2.3 航空运营人运行能力的建立.......................................................................- 8 -4.2.4 宣传与培训...................................................................................................- 8 -4.2.5 国际协调.......................................................................................................- 8 -5. 实施时间表......................................................................................................................- 9 -5.1 近期(2009-2012).............................................................................................- 9 -5.2 中期(2013-2016)...........................................................................................- 10 -5.3 远期(2017-2025)............................................................................................- 11 -6. 通用航空........................................................................................................................- 12 -6.1 现状.......................................................................................................................- 12 -6.2 发展策略...............................................................................................................- 13 -7. 航空器能力....................................................................................................................- 14 -7.1 现有机队总体情况...............................................................................................- 14 -7.2 机载设备标准.......................................................................................................- 16 -7.3 机队PBN能力现状...............................................................................................- 16 -7.4 机队改装计划.......................................................................................................- 17 -8. 导航基础设施................................................................................................................- 19 -8.1 现状.......................................................................................................................- 19 -8.1.1 传统导航设施.............................................................................................- 19 -8.1.2 GNSS导航设施............................................................................................- 20 -8.2 GNSS未来发展......................................................................................................- 22 -8.2.1“伽利略”卫星导航系统...........................................................................- 22 -8.2.2 GPS现代化...................................................................................................- 22 -8.2.3 GLONASS现代化.......................................................................................- 22 -8.2.4 “北斗”卫星导航系统..................................................................................- 23 -8.3 导航设施规划策略...............................................................................................- 24 -8.3.1 过渡计划.....................................................................................................- 24 -8.3.2 地基导航设施.............................................................................................- 24 -8.3.3 GNSS导航设施............................................................................................- 24 -9. 安全实施原则................................................................................................................- 25 -10. PBN与其他技术的融合及展望...................................................................................- 26 -10.1 通信技术.............................................................................................................- 26 -10.2 监视技术.............................................................................................................- 26 -10.3 其他进近着陆能力.............................................................................................- 27 -10.3.1 “北斗”终端导航........................................................................................- 27 -10.3.2 有垂直引导的进近(APV)........................................................................- 27 -10.3.3 GBAS着陆系统(GLS)..........................................................................- 27 -11. 路线图的修订..............................................................................................................- 29 - 附件A-PBN导航规范简介..............................................................................................- 30 - 附件B-PBN整体规章标准框架......................................................................................- 32 - 附件C-国际PBN实施整体概况......................................................................................- 33 - 附件D-术语......................................................................................................................- 35 - 致谢.....................................................................................................................................- 38 -1. 背景1.1 PBN概念在航空飞行中,传统导航是利用接收地面导航台信号,通过向台和背台飞行实现对航空器的引导,航路划设和终端区飞行程序受地面导航台布局与设备种类的制约。

第45卷 第4期2023年7月物探化探计算技术COMPUTINGTECHNIQUESFORGEOPHYSICALANDGEOCHEMICALEXPLORATIONVol.45 No.4Jul.2023收稿日期:2022 04 19基金项目:陕西省教育厅科学研究计划项目(22JK0526)第一作者:郑建波(1990-),女,硕士,讲师,主要从事电磁勘探方法研究,E mail:zhengjianbobo1990@163.com。
文章编号:1001 1749(2023)04 0478 06航空瞬变电磁全时域全空域快速成像郑建波,李美艳(西安外事学院工学院,西安 710077)摘 要:航空瞬变电磁法以其快速高效的优势已获得广泛应用,然而航空瞬变电磁采样密集,数据量巨大。
为了实现航空瞬变电磁观测数据的快速解释,开展航空瞬变电磁快速成像算法研究。
利用反函数定理建立成像迭代格式,并在成像过程中考虑发射源高度和观测时间的影响,进而实现航空瞬变电磁全时域全空域快速成像。
这里首先给出了全时域全空域成像理论和实现方法,然后对航空瞬变电磁装置进行了介绍,最后建立了典型采空区模型,利用开发的航空瞬变电磁全时域全空域视电阻率成像方法进行数据成像,成像结果与真实模型基本一致,验证了方法的有效性。
关键词:航空瞬变电磁;全时域;全空域;成像中图分类号:P631.3 文献标志码:A 犇犗犐:10.3969/j.issn.1001 1749.2023.04.080 引言航空瞬变电磁法将电磁探测装置搭载在飞机上,通过发射线圈进行大功率发射,激发地下感应涡流,通过观测断电间歇感应涡流产生的二次磁场的空间和时间分布特征,对地下目标进行快速电磁探测。
由于该方法具有快速、高效、受地形影响小等特点,已被广泛应用于矿产勘查、环境地质调查等诸多领域[1-5]。
由于航空瞬变电磁法在探测过程中进行连续采样,获得海量观测数据,因此具有较高的分辨率。
然而,海量数据量也给航空瞬变电磁数据解释带来了巨大困难。
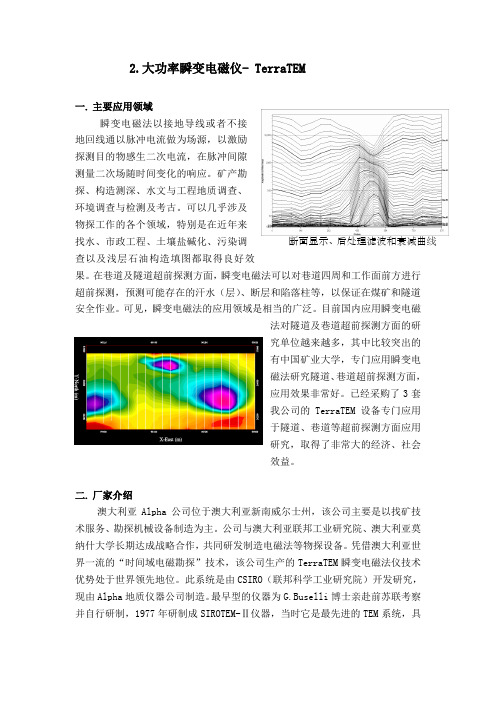
2.大功率瞬变电磁仪- TerraTEM一. 主要应用领域瞬变电磁法以接地导线或者不接地回线通以脉冲电流做为场源,以激励探测目的物感生二次电流,在脉冲间隙测量二次场随时间变化的响应。
矿产勘探、构造测深、水文与工程地质调查、环境调查与检测及考古。
可以几乎涉及物探工作的各个领域,特别是在近年来找水、市政工程、土壤盐碱化、污染调查以及浅层石油构造填图都取得良好效果。
在巷道及隧道超前探测方面,瞬变电磁法可以对巷道四周和工作面前方进行超前探测,预测可能存在的汗水(层)、断层和陷落柱等,以保证在煤矿和隧道安全作业。
可见,瞬变电磁法的应用领域是相当的广泛。
目前国内应用瞬变电磁法对隧道及巷道超前探测方面的研究单位越来越多,其中比较突出的有中国矿业大学,专门应用瞬变电磁法研究隧道、巷道超前探测方面,应用效果非常好。
已经采购了3套我公司的TerraTEM 设备专门应用于隧道、巷道等超前探测方面应用研究,取得了非常大的经济、社会效益。
二. 厂家介绍澳大利亚Alpha 公司位于澳大利亚新南威尔士州,该公司主要是以找矿技术服务、勘探机械设备制造为主。
公司与澳大利亚联邦工业研究院、澳大利亚莫纳什大学长期达成战略合作,共同研发制造电磁法等物探设备。
凭借澳大利亚世界一流的“时间域电磁勘探”技术,该公司生产的TerraTEM 瞬变电磁法仪技术优势处于世界领先地位。
此系统是由CSIRO (联邦科学工业研究院)开发研究,现由Alpha 地质仪器公司制造。
最早型的仪器为G.Buselli 博士亲赴前苏联考察并自行研制,1977年研制成SIROTEM-Ⅱ仪器,当时它是最先进的TEM 系统,具断面显示、后处理滤波和衰减曲线有多道的、发射机和接收机一体的、叠加可选等先进指标。
1990年CSIRO推出SIROTEM-Ⅲ型仪器,它是SIROTEM-Ⅱ型的革新,而不是一般的改进,它是数字发射机和接收机装在一起的紧凑型轻便仪器,并可以与外接大功率发射机一起工作,该系统九十年代被中国引进,并享有良好的口碑。

第43卷第1期物探化探计算技术Vol.43No.1 2021年1月COMPUTING TECHNIQUES FOR GEOPHYSIC A L AND GEOCHEMIC A L EXPLORATION Jan.2021文章编号:1001-1749(2021)01-009106直升机大功率时间域(TEM)航空电磁系统简介及在勘查多金属矿床上的应用卢俊丰,纪福山(中国冶金地质总局地球物理勘查院,保定071051)摘要:国内在大功率时间域航空电磁法的应用上,还不像航空磁测、航空放射性测量那样普及,起步也较晩,由于历史原因目前技术尚不成熟,大家对其设备、飞行方法、数据采集等方面了解的还不是很多。
这里介绍了TS—150型时间域航空电磁系统的设备组成、发射机原理、系统工作的原理、系统中的补偿原理、采集数据的取样方式、数据的记录单位、系统的测量噪声及测线飞行测量结果的nT/s平面色阶图、测线剖面nT/s异常图的初步解释推断等内容,并进行了实验验证。
关键词:航空电磁系统;吊挂系统;电磁补偿;取样率;测量噪声;数据记录单位中图分类号:P631.3文献标志码:A DOI:10.3969力.issn.1001-1749.2021.01.120引言2013年10月,中国冶金地质总局地球物理勘查院(勘查院)引进了加拿大BECI—胜利勘查公司生产的TS—150型大功率时间域航空电磁系统。
在内蒙古阿鲁科尔沁旗野外现场顺利通过了各项技术指标的验收,并及时投入了内蒙古敖包吐试验区和1017高地试验区多金属矿1:10 000大比例尺的航空电磁法测量工作。
由此,勘查院的航空物探测量能力有了极大的提升,有能力开展大比例尺勘查多金属硫化物矿床的飞行测量工作,拓宽了航空物探工作的领域,更经济、更精准、更快速的为矿山勘查服务。
利用该套设备,勘查院于2016年和2018年又分别完成了新疆白石头泉一带航空TEM测量和安徽怀远一蒙城一带航空TEM测量任务,取得了令人满意的测量效果。
ATEM瞬变电磁测量系统资料ATEM瞬变电磁测量系统是一种用于瞬变电磁场测量和分析的设备。
本文将介绍ATEM系统的基本原理、应用、技术特点等方面的资料。
基本原理ATEM瞬变电磁测量系统基于瞬态电磁法的测量原理,通过测量地下物质对瞬变电磁场的响应,来推断地下结构、岩性、水文地质等信息。
其主要原理可以概括为:1.激发源在地面上放置一对互相平行的电流线圈,利用一台高压脉冲发生器产生电流或电压突变信号激发电流线圈。
2.地下结构接受到电磁波后会发生电流及电荷分布,导致感应线圈中出现电势差,记录线圈输出的信号,进而反演出地下结构信息。
ATEM系统能够采集高时间分辨率的数据,并且对地下岩石、矿物、液体等亚表面结构特征的探测具有较高精度和可靠性。
应用场景ATEM瞬变电磁测量系统被广泛应用于地下水文地质、矿产资源勘探、土地利用规划、道路、桥梁、隧道、地铁等工程中的地质隐患分析等领域。
具体应用场景包括:•地下水资源勘探:对水源地水资源分布情况进行探测,帮助水利部门进行水资源管理和规划,保障城市及农业用水需求。
•矿产资源勘探:通过刻意的激发源、观测线选点的选择,透过地表特定的负荷电流等方法,可在照明状况相同下,从地下找到某些特定矿产的含量等信息。
•土地利用规划:系统可用于动态监测地下管道和建筑物等结构体至设立的埋深水平、及时跟踪物质运移和稳滞域进程,实现土地利用规划的科学化和经济化。
•隧道、地铁及其他工程钻探:对于排列较密、位置相近难以保证钻探施工安全的工程钻井,ATEM能够在一定范围内将被测量目标高度度量出来,从而对钻探的目标和步骤提供保障。
技术特点ATEM瞬变电磁测量系统具有以下技术特点:1.采样速度快:系统可以实现多通道数据采集,采样速度可达数百万个采样点每秒。
2.数据准确:ATEM系统可以实现高分辨率的振幅测量和高精度、高分辨率的时间同步测量,从而实现数据准确性。
3.信噪比高:系统设计了具有良好抗干扰的电路和软件算法,有效提高了信噪比。
2014年可能改变世界的十大高科技发明美国权威机构最近推出了2014年可能改变世界的10大发明。
1.高空风电系统“空中浮动涡轮”(BAT)美国奥泰罗能源公司(Altaeros Energies)开始测试一种新型飘浮式风力发电机(Buoyant Airborne Turbine,BAT)。
这种发电系统能在约300米空中发电,不但环保,而且价格低廉,易于安装维护。
该公司执行官本·格拉斯(Ben Glass)表示,几十年来,一般风电塔的叶片高度只有一、二百米,但通常这个高度的风力都较低且不稳定。
高空风电系统“空中浮动涡轮”该公司采取一个大的充气环将空中风力发电机升至风力更强劲的高空,让其充分获取风力资源,通过电线将电力输往地面,产生的能量足够供给十几个家庭使用。
该发电机非常容易安装维护且成本很低。
BAT原型机被部署在离地面约300米,可避免对鸟类野生动物产生影响。
该公司的工程师在设计中综合考虑了各种恶劣的天气条件,在遭遇时速160公里的大风和强降雨时,BAT能够自主停靠其地面站,等待暴雨结束后继续产生电源。
高空风电系统“空中浮动涡轮”BAT的外壳由不透气的耐用面料制成,里面充满氦气。
借助新面料技术,BAT实现了低气体泄漏率。
该公司网站指出,通过集装箱运输,该装置降低了风力发电的第二大成本,即高达90%的安装和运输成本。
此外,该设备可在高达600米之上运行,产生的能量是类似等级塔上安装风力涡轮机的两倍。
该项目已在阿拉斯加州展开为期18个月的测试。
这是第一个商业化示范计划,或标志下一代风力发电的发展方向。
2. 虚拟现实三维眼镜Glyph美国埃夫根特公司(Avegant)出品的Glyph 是一款虚拟现实的三维眼镜,但它的工作原理非常特别,是通过把影像的光线投射在人眼上,然后在视网膜上成像。
该公司将这技术称为“虚拟视网膜屏幕”(VRD)。
该公司称,使用VRD技术,人眼直接接受入射光线,因而该设备的视觉体验与普通屏幕全然不同,更像是透一扇窗看外面的景色,会非常真实。
SkyTEM——一种新型高分辨率直升飞机瞬变电磁法观测系统Kurt I.Sorensen1 Esben Auken2关键词:电磁法,航空电磁法,瞬变电磁法,时间域电磁法,直升飞机电磁法(HTEM),SkyTEM,水文地质学,水文地质勘察摘要SkyTEM是一种应用于水文地质勘察和环境调查的时间域直升飞机电磁法观测系统,作为一种迅速发展的、有别于陆基观测系统的新型瞬变电磁法观测系统,它的分辨率相当于常规的40x40m2观测系统,整个系统悬挂在直升飞机下面,独立于飞机。
现在应用的系统,发射机一般都固定在轻型木制网格框架上,是一个四匝12.5x12.5m2的方形回路,四匝线圈各自分开,一匝是短发射磁矩,四匝都是长发射磁矩,短磁矩使用30A电流,断电时间4µs;长磁矩使用近50A的电流,断电时间80µs。
接收机是被保护的过阻尼多匝线圈回路,它被牢固的固定在发射回路旁。
这套装置本质上是一个带垂直偏置的中心回线装置。
在直升机低空垂直盘旋模式,SkyTEM的响应在常规地面系统响应的2%之内,仪器偏置电平影响不大,因为高空试验显示背景噪声电平比仪器偏置电平大。
通过把探测器从试验模式调整到标准模式,应用SkyTEM系统参数可以计算未来响应。
当飞行高度为7.25m,10m20m时,陆基模式的响应在SkyTEM响应的5%之内。
规范的野外操作包括在勘查区域建一个重复基站,每一个半小时获取一次近似数据,在直升机加油时用它来监视系统的稳定性。
这套系统在矿产勘探时能很成功的获取数据,尤其是在发现和描述掩埋谷地结构以及水文地球物理勘探中作用极大。
引言航空电磁法(AEM)系统的应用已有50多年的历史了(Fountain,1998),二十世纪五十年代第一次应用就在加拿大的贱金属探测中取得成功,此后十年的时间里,有超过十套的航空探测系统投入使用(Palacky,1986;Palacky和West,1991)。
二十世纪五十年代最成功的系统是Induced PUIse Transient(INPUT),它当时几乎占据了这一领域70%的市场份额(Barringer,1962)。
在1972年,芬兰开发出一种双频积分系统,并首次应用在覆盖全国的调查中(Peltoniemi,1986)。
加拿大和北欧国家领导了这次科研活动,并使用航空电磁法系统,而到了二十世纪七十年代,AEM就在全球范围内使用了。
随着AEM在贱金属勘探中的作用下降,它开始从异常探测转向电导率绘图,同时出现了频率域直升飞机电磁法系统(Fraser,1978)。
到二十世纪九十年代,贱金属探测把目光投向地球深部,AEM 系统开始向这两个方向发展:用于探测深部导体的固定翼时间域系统和用于近地表高分辨率电导率绘图的频率域直升飞机电磁法系统。
自从诞生以来,航空电磁法已出现了30多种系统,但是今天依然使用的已经不多。
GEOTEM系统(Annan,1990;Annan等,1996),和使用更大磁矩的MEGATEM 系统(Smith等,2003),都是INPUT系统的数字化扩展,使用的是瞬变半正弦波形,TEMPEST系统像一般的地面TEM系统一样使用瞬变方波。
在频率域中,常用的是Dighem型多线圈多频系统(Fraser,1978),但是现在已经出现了一种多频单线圈双HEM系统(Won等,2003)。
已经有了一些建立一套直升飞机瞬变电磁(HTEM)系统,或固定翼瞬变电磁系统的尝试,以便进行近地表探测。
1982年,一种类似INPUT系统,被称为“飞行的蜘蛛网”的HTEM提了出来,但是由于直升机的机动性,这套系统被用在崎岖地带。
然而在复杂地形条件下,当飞机无法保持合适的飞行速度时,这套系统的作用就大打折扣。
SALTMAP系统(Duncan等,1992)是一种固定翼早期瞬变电磁法系统,它利用方形波发射器和500Hz基频探测近地表。
但早期的SALTMAP系统并不成功,它产生混合多解,绘出的是不确定、低品质的电导率图,有时能和已知的盐湖对应上,有时却不能(Spies,2001)。
直到近些年,瞬变直升飞机系统的概念才成熟起来,新系统试图实现小覆盖区宽频带测量。
AeroTEM(Balch等,2002),NEWTEM(Eaton等,2002),Hoistem (.au),还有VTEM系统(Edward Morrison,Geotech公司,私人通讯),主要都是用于矿产勘探,是一种不同于GEOTEM系统、能更好的应用于地质填图。
SkyTEM系统(Sorensen,K.I.和Auken,2003),是一种迅速发展的、区别于陆基TEM系统的新型瞬变电磁系统,它主要用于近地表地质结构填图,以探测地下水和进行环境调查。
水文地球物理勘探地面瞬变电磁法用在寻找地下水方面已有数十年的历史了,全世界多种地质条件的找水都用这种方法:从玄武岩地质到沉积地质环境(Fitterman和Stewart,1986;Mills等,1988;McNeill,1990;Sandberg和Hall,1990;Christensen 和Sorensen,1998;Courteaud等,1998;Sandberg等,1998;Meju等,1999;Poulsen和Christensen,1999;Yang等,1999;Sorensen等,2000;Hatch等,2002)。
电法和电磁法地下水探测方面是强有力的物探工具,因为它们的结果能用来评估涉及保护层的水体特性(Mazac等,1985;Kalinski等,1993),如地下水的化学相与污染物有关(Buselli等,1988),还有地热资源(Kirsch等,2003),以及水文地球物理结构(Danielsen等,2003;Jorgensen等,2003)。
这些方法的勘探深度从15m到250m,最大勘探深度依赖于目标体的深度,通常针对含水层特性的探测间距从80m到150m。
尽管越深的地质体越不寻常,但他们却很重要。
描绘浅层部分,比如粘土保护帽,获得10至15µs的早期数据,从斜坡初期开始计算,一直到1至8ms。
在水文物探中,10-20%的响应变化就能满足对砂质含水层的描述;而在基本金属矿的勘探中,目标体的响应通常要在背景噪声的10至100倍以上。
如图1图1用一个薄板模型来计算所探测目标矿体的响应,并与水文地质的层状地球模型响应进行对比。
两种模型使用的都是TEM中心回线装置。
含水层响应约是背景噪声响应的1.2倍,然而,矿化层响应却是背景噪声的近100倍。
因此,绝对数据的准确性对水文物探是至关重要的。
数据的准确性由仪器的电子稳定性(趋势)、绘图系统的转移函数(发射器波形,接收机低通滤波器,计时)和几何阵列的尺寸稳定性来确定。
如果设计不精确,这些因素极容易引起测量结果1.05倍的改变,这对于上面的1.2倍来说是一个不容忽视的误差,这种至关重要性在图1中已有体现。
影响水文物探的因素不光是解释时必需的高精度数据,还有进行勘探的地方通常是人类活动区,靠近测量点的各种人工设施极易影响测量结果,这些设施发出的信号与发送信号耦合相干(Fitterman等,1990;Nekut和Eaton,1990;Polzer等,1990;Qian和Boerner,1995),所以必须把这些干扰信号识别出来,以免造成错误的解释。
一般来说,耦合信号可以分成两部分:电容耦合和电流耦合(Sorensen等,2001),电容耦合有一个震荡模式,在单信号测量时很容易被识别出来;电流耦合就很难被识别了,因为其衰减曲线和单纯的地质体响应衰减曲线很相似。
因此,密集空间测量是一种很有优势的方法,它能在数据解释前识别和剔除由人工设施干扰所造成的无用数据。
一般说来,如果TEM阵列和人工设施之间的距离超过100m,就能很好的避免耦合干扰,这一距离是由地下整体电阻率决定的。
SkyTEM与地面站配合试验SkyTEM系统是根据地面TEM系统在水文物探中多年来的经验设计而成的。
Geonics PROTEM接收机和TEM47发射机,在丹麦是最常用的找水系统。
40x40m2的线圈发射3A电流,为晚期(远区)测量提供4800A·m2的发射磁矩。
对于早期(近区)测量,则使用1A的电流,把发射磁矩下降到1600A·m2,避免接收线圈达到饱和,保证发射线圈的稳定。
就以丹麦的噪声水平,PROTEM47系统能够测量的时间间隔是从10µs到1-4ms。
一般的背景噪声约为每毫秒1到6nV (31.4m2的有效接收面积,1000排列)。
本文涉及的系统是常规瞬变电磁法系统,对平均大地电阻率为10至100Ω·m的测区,探测深度为120到150m。
更深入的探讨探测深度与背景噪声的关系,见Spies,(1988)。
为了增加陆基TEM测量的有效时间,发展出了牵引阵列瞬变电磁系统(PATEM)(Sorensen等,2000;Sorensen等,2004),一种能每天记录10至15公里连续采样TEM数据的牵引系统。
该系统采用的3x5m2多匝接收线圈,与发送线圈相距25m,发射线圈和接收线圈被固定在一个用小型履带牵引机拖着的雪橇上。
要取得更大的探测深度,就需要更大的发射磁矩,这就使得瞬变电磁法向更远处发展,HiTEM系统(Auken和Sorensen,2003;Danielsen等,2003),采用PROTEM的接受装置,发射装置是提供75A电流的30x30m2线圈,其发射磁矩约为67000A·m2。
HiTEM系统由两部分组成:一个由75A电流驱动的大磁矩偏置线圈和一个由2.4A电流驱动的小磁矩中心回线。
该系统采用传统TEM的近地表分辨率,探测深度就能达到250至300m。
除了大磁矩之外,探测深度之所以增加还因为新接收线圈的噪声是陆基设备噪声水平的1/2至1/3。
日常获得数据的速度与传统TEM装置差不多。