基于DSSA的智能对靶喷雾机软件系统设计
- 格式:pdf
- 大小:324.77 KB
- 文档页数:3

基于DSP和单片机的实时对靶喷施除草系统
裴文超;陈树人;尹东富
【期刊名称】《农机化研究》
【年(卷),期】2012(034)001
【摘要】根据田间杂草智能喷施系统中图像处理计算量大、实时性要求高、控制任务重的特点,提出了一种基于DSP和单片机相结合的双CPU系统方案,充分利用了DSP实时数据处理能力强和单片机外围控制能力强的优点,实现了系统的快速运算和实时控制功能.同时,介绍了系统的设计方案以及DSP、单片机各自功能的软件实现.试验表明,系统在室内条件下可以满足实时对靶喷施除草的要求.
【总页数】5页(P149-153)
【作者】裴文超;陈树人;尹东富
【作者单位】江苏大学现代农业装备与技术省部共建教育部重点实验室,江苏镇江212013;江苏省农业装备与智能化高技术研究重点实验室,江苏镇江212013;江苏大学现代农业装备与技术省部共建教育部重点实验室,江苏镇江212013;江苏省农业装备与智能化高技术研究重点实验室,江苏镇江212013;江苏大学现代农业装备与技术省部共建教育部重点实验室,江苏镇江212013
【正文语种】中文
【中图分类】TP273+.5
【相关文献】
1.基于DSP和DSP/BIOS的实时雷达信号采集与处理系统 [J], 孟凡志;索继东;于川;许小可
2.基于DSP的实时红外热成像系统的数据交换及实时显示 [J], 张晓飞;袁祥辉
3.基于ARM7的精确对靶喷施除草嵌入式控制系统 [J], 陆健;毛罕平;陈树人
4.基于DSPs的实时多光谱检测系统研究 [J], 孙海峰
5.基于DSP和单片机的实时变量喷药系统设计 [J], 张奇;徐艳蕾;王新东;孟笑天;何润;杜家奇
因版权原因,仅展示原文概要,查看原文内容请购买。
喷雾机的喷雾系统设计作者:宋金山来源:《农机使用与维修》2020年第04期摘要:目前国内市场所售的用于草坪的喷雾机普遍存在喷雾控制精度低的缺陷。
然而为了提高草坪的质量又无法避免在日常养护作业中使用农药,农药的过量使用,对环境造成的污染在不断破坏动物的生存环境及人类的身体健康。
这就要求提高喷雾作业精度,以安全可靠的自动喷雾控制系统提高药物的利用率。
因此,论述了一款喷雾机的高精度喷雾系统的设计。
该喷雾系统采用隔膜泵作为动力源,隔膜泵通过水管与喷雾机尾部喷雾控制系统相联,喷雾控制系统所配置的压力传感器和行驶轮所配置的速度传感器为控制台反馈信号,从而实现高精度喷雾作业。
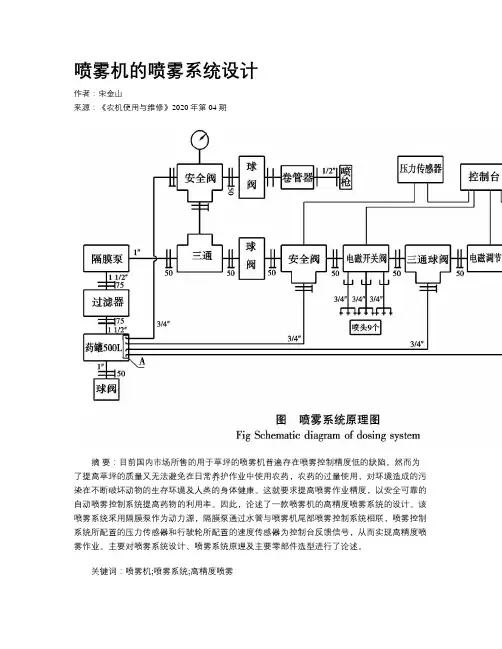
主要对喷雾系统设计、喷雾系统原理及主要零部件选型进行了论述。
关键词:喷雾机;喷雾系统;高精度喷雾中图分类号:S491 ; ; ; ;文献标识码:Adoi:10.14031/ki.njwx.2020.04.0060 引言作物和草坪等植物病虫害的防治离不开农药的使用,然而所喷洒的农药大部分都没有作用到防治靶标上,有效利用率相对较低,不仅造成经济方面的损失,还会造成环境污染,进而影响人畜健康。
农药有效利用率的提高,是农药学科面临的重要且迫切的问题,新时期农药使用技术的主要研究内容也将针对其进行展开。
农药有效利用率的提高,避免非有效的喷洒,就对施药机具和喷雾系统提出了更高的要求。
根据国内外该类产品现状,开发一款喷雾机的喷雾系统解决喷雾精度低的问题,意义重大且迫在眉睫。
1 喷雾系统方案论证喷雾系统是喷雾机功能实现的关键所在,通过控制系统内液体的压力和流量,达到所需要的喷洒效果。
喷雾系统一般包含动力部分、控制部分和执行部分。
1.1 动力部分动力部分主要元件是水泵,常用的有物理泵、离心泵和隔膜泵三种。
(1)物理泵。
通常指的是三缸柱塞泵,通过三个柱塞进行往复运动来达到增压和输送目的的往复泵。
(2)离心泵。
依靠叶轮的高速旋转来使流体获得较大的动能,并依靠流道出口的蜗壳断面变化使流体的动能转化为压力能。
LiDAR探测自动对靶喷雾控制系统设计李秋洁1,徐波2,束义平1,陶冉1(1.南京林业大学机械电子工程学院,南京210037;2.华东理工大学信息科学与工程学院,上海200237)摘要:LiDAR(Light Detection andRanging,激光雷达)能快速获取靶标完整形貌,是目前最先进的靶标探测技术。
为此,设计了基于上下位机结构的LiDAR探测自动对靶喷雾控制系统。
其上位机采用MFC多线程编程,实现点云数据采集、靶标探测及喷雾时间补偿,同时具有喷雾模式及作业参数设置、喷头状态显示等人机交互功能;下位机采用C51编程,实现喷雾指令接收与喷头启闭控制。
通过MatLab靶标探测算法仿真及上下位机联合调试,验证了所采用开发方式的有效性。
关键词:对靶喷雾;多喷头喷雾机;激光雷达;人机交互中图分类号:S491;S758文献标识码:A文章编号:1003-188X(2019)08-0065-070引言对靶施药技术采用实时传感器在线探测树木信息,控制喷头进行有树喷药、树间隙不喷的对靶喷雾,且可根据树木大小、形状、体积调整施药剂量的变量施药。
国外对对靶喷雾技术研究及应用较多,采用的探测技术包括红外、超声波、激光及图像等,主要用于苹果园、梨园、橙园、柑橘园等果园的病虫害防治,与连续喷雾施药方式相比,可节省20% 75%的药液,并可有效提高药液在树木上的沉积率,降低农药残留[1-4]。
在国内,诸多学者对自动对靶喷雾技术开展了一系列研究。
何雄奎等[5]将红外探测技术用于对靶施药,将喷雾范围分为上、中、下3段分别进行红外探测,根据靶标有无控制相应喷头动作。
陈志刚等[6]以实体植株为试验对象研究红外探测影响因子,结果表明植株外形、光照强度、探测器行走速度和植株间距对探测效果有较为显著的影响。
甘英俊等[7]建立树叶相对颜色指数模型,在FPGA上实现基于图像处理的对靶喷雾控制系统。
葛玉峰等[8]提出基于相对色彩因子的树木图像分割算法,建立基于机器视觉的室内农药自动精确喷雾系统。

2012年1月农机化研究第l期基于D SP和单片机的实时对靶喷施除草系统裴文超1’2,陈树人1’2,尹东富1(1.江苏大学现代农业装备与技术省部共建教育部重点实验室,江苏镇江212013;2.江苏省农业装备与智能化高技术研究重点实验室,江苏镇江212013)摘要:根据田间杂草智能喷施系统中图像处理计算董大、实时性要求高、控制任务重的特点,提出了一种基于D SP和单片机相结合的双CPU系统方案,充分利用了D SP实时数据处理能力强和单片机外围控制能力强的优点,实现了,系统的快速运算和实时控制功能。
同时,介绍了系统的设计方案以及D S P、单片机各自功能的软件实现。
试验表明,系统在室内条件下可以满足实时对靶喷施除草的要求。
关键词:精确农业;D S P;单片机;实时喷施;除草中圈分类号:T P273+.5文献标识码:A文章编号:1003—188X(2012)01—0149一050引言1系统结构与功能田问杂草与农作物争水、争肥、争光,影响作物的产量和质量,降低作物的经济价值,已严重威胁农业生产和经济发展¨o。
目前除草的方法有很多种,如人工除草、机械除草、覆盖除草、热水或蒸汽除草、激光除草、生物除草和化学除草等,其中最主要的除草方法是化学除草。
但是化学除草剂的使用方式普遍为粗放式的大面积喷洒,喷洒到作物和土壤等无杂草区域的除草剂不仅造成了浪费,而且还给生态环境带来了很大的危害。
利用除草剂防治杂草省时省力、经济效益高,但应尽量减少除草剂的使用量以降低其危害,如何改变化学除草剂传统的使用方式、改进施药技术成为绿色农业发展进程中一个亟需解决的问题心。
3J。
针对化学除草中大面积喷洒除草剂带来的药液浪费以及环境污染,且现有施药器具无法满足实时状态下精确对靶喷施的现状,提出了一种搭载于移动平台上基于D SP和单片机的实时对靶喷施除草系统。
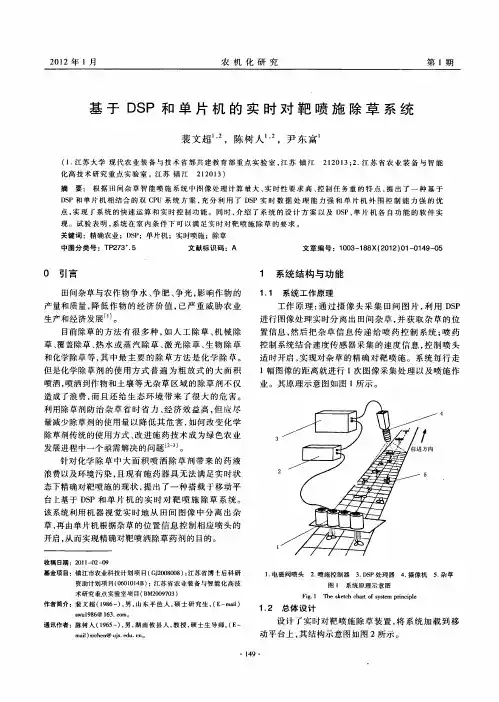
该系统利用机器视觉实时地从田间图像中分离出杂草,再由单片机根据杂草的位置信息控制相应喷头的开启,从而实现精确对靶喷洒除草药剂的目的。