空间后方交会精度分析及实验验证
- 格式:docx
- 大小:42.02 KB
- 文档页数:9
单像空间后方交会实习报告摘要本报告旨在总结并评估笔者在单像空间后方交会实习中的经验和收获。
首先,报告介绍了单像空间后方交会实习的目的和背景。
接着,报告详细描述了实习期间所进行的实验和操作步骤。
在实习过程中,笔者遇到了一些挑战,但通过团队合作和专业指导取得了成功。
最后,报告总结了实习对于个人职业发展的重要性,并提出了改进实习体验的建议。
1. 引言单像空间后方交会是测量和分析地球或其他星球上的点的空间坐标的方法之一。
该方法通过将来自不同位置的图像投影到一个共同的平面上,并在该平面上对图像进行测量和分析,以确定点的坐标。
本实习旨在将现实生活中的实地测量和图像处理技术相结合,通过实际操作了解和掌握单像空间后方交会的原理和应用。
2. 实习过程本次实习分为三个步骤:图像获取、图像处理和空间坐标计算。
2.1 图像获取首先,为了进行后续的图像处理和分析,我们需要获取一组具有不同视角的图像。
为了实现这个目标,我们选择了一片公共景区进行实地测量。
在测量过程中,我们使用了专业的测量设备和相机,并按照一定的间隔和角度拍摄了一组图像。
这些图像将被用于后续的图像处理和分析。
2.2 图像处理在图像处理阶段,我们使用了专业的图像处理软件对获取到的图像进行处理。
首先,我们使用了相机标定算法对相机内外参数进行校准,以保证后续测量的精度和准确度。
然后,我们对每张图像进行了特征点提取和匹配,以建立图像之间的对应关系。
最后,根据所获得的对应关系,我们重建了图像场景的三维模型,并将其用于后续的空间坐标计算。
2.3 空间坐标计算在空间坐标计算阶段,我们使用了单像空间后方交会的原理,计算了每个图像特征点的空间坐标。
首先,我们将图像场景的三维模型与图像上的特征点进行对应,以确定特征点在三维空间中的位置。
然后,我们利用三角测量原理计算出特征点的三维坐标。
最后,通过对所有图像特征点的计算,我们可以得到目标点的空间坐标。
3. 实习挑战与解决在实习过程中,我们遇到了一些挑战,如图像质量、算法调优和测量误差等。
摄影测量学实验报告实验一、单像空间后方交会学院:建测学院班级:测绘082姓名:肖澎学号: 15一.实验目的1.深入了解单像空间后方交会的计算过程;2.加强空间后方交会基本公式和误差方程式,法线方程式的记忆;3.通过上机调试程序加强动手能力的培养。
二.实验原理以单幅影像为基础,从该影像所覆盖地面范围内若干控制点和相应点的像坐标量测值出发,根据共线条件方程,求解该影像在航空摄影时刻的相片外方位元素。
三.实验内容1.程序图框图2.实验数据(1)已知航摄仪内方位元素f=153.24mm,Xo=Yo=0。
限差0.1秒(2)已知4对点的影像坐标和地面坐标:3.实验程序using System;using System.Collections.Generic;using System.Linq;using System.Text;namespace ConsoleApplication3{class Program{static void Main(){//输入比例尺,主距,参与平参点的个数Console.WriteLine("请输入比例尺分母m:\r");string m1 = Console.ReadLine();double m = (double)Convert.ToSingle(m1);Console.WriteLine("请输入主距f:\r");string f1 = Console.ReadLine();double f = (double)Convert.ToSingle(f1);Console.WriteLine("请输入参与平差控制点的个数n:\r");string n1 = Console.ReadLine();int n = (int)Convert.ToSingle(n1);//像点坐标的输入代码double[] arr1 = new double[2 * n];//1.像点x坐标的输入for (int i = 0; i < n; i++){Console.WriteLine("请输入已进行系统误差改正的像点坐标的x{0}值:\r", i+1);string u = Console.ReadLine();for (int j = 0; j < n; j += 2){arr1[j] = (double)Convert.ToSingle(u);}}//2.像点y坐标的输入for (int i = 0; i < n; i++){Console.WriteLine("请输入已进行系统误差改正的像点坐标的y{0}值:\r", i+1);string v = Console.ReadLine();for (int j = 1; j < n; j += 2){arr1[j] = (double)Convert.ToSingle(v);}}//控制点的坐标输入代码double[,] arr2 = new double[n, 3];//1.控制点X坐标的输入for (int j = 0; j < n; j++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的X{0}值:\r", j+1);string u = Console.ReadLine();arr2[j , 0] = (double)Convert.ToSingle(u);}//2.控制点Y坐标的输入for (int k = 0; k < n; k++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的Y{0}值:\r", k+1);string v = Console.ReadLine();arr2[k , 1] = (double)Convert.ToSingle(v);}//3.控制点Z坐标的输入for (int p =0; p < n; p++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的Z{0}值:\r", p+1);string w = Console.ReadLine();arr2[p , 2] = (double)Convert.ToSingle(w);}//确定外方位元素的初始值//1.确定Xs的初始值:double Xs0 = 0;double sumx = 0;for (int j = 0; j < n; j++){double h = arr2[j, 0];sumx += h;}Xs0 = sumx / n;//2.确定Ys的初始值:double Ys0 = 0;double sumy = 0;for (int j = 0; j < n; j++){double h = arr2[j, 1];sumy += h;}Ys0 = sumy / n;//3.确定Zs的初始值:double Zs0 = 0;double sumz = 0;for (int j = 0; j <= n - 1; j++){double h = arr2[j, 2];sumz += h;}Zs0 = sumz / n;doubleΦ0 = 0;doubleΨ0 = 0;double K0 = 0;Console.WriteLine("Xs0,Ys0,Zs0,Φ0,Ψ0,K0的值分别是:{0},{1},{2},{3},{4},{5}", Xs0, Ys0, Zs0, 0, 0, 0);//用三个角元素的初始值按(3-4-5)计算各方向余弦值,组成旋转矩阵,此时的旋转矩阵为单位矩阵I:double[,] arr3 = new double[3, 3];for (int i = 0; i < 3; i++)arr3[i, i] = 1;}double a1 = arr3[0, 0]; double a2 = arr3[0, 1]; double a3 = arr3[0, 2];double b1 = arr3[1, 0]; double b2 = arr3[1, 1]; double b3 = arr3[1, 2];double c1 = arr3[2, 0]; double c2 = arr3[2, 1]; double c3 = arr3[2, 2];/*利用线元素的初始值和控制点的地面坐标,代入共线方程(3-5-2),* 逐点计算像点坐标的近似值*///1.定义存放像点近似值的数组double[] arr4 = new double[2 * n];//----------近似值矩阵//2.逐点像点坐标计算近似值//a.计算像点的x坐标近似值(x)for (int i = 0; i < 2 * n; i += 2){for (int j = 0; j < n; j++){arr4[i] = -f * (a1 * (arr2[j, 0] - Xs0) + b1 * (arr2[j, 1] - Ys0) + c1 * (arr2[j, 2] - Zs0)) / (a3 * (arr2[j, 0] - Xs0) + b3 * (arr2[j, 1] - Ys0) + c3 * (arr2[j, 2] - Zs0)); }}//b.计算像点的y坐标近似值(y)for (int i = 1; i < 2 * n; i += 2){for (int j = 0; j < n; j++){arr4[i] = -f * (a2 * (arr2[j, 0] - Xs0) + b2 * (arr2[j, 1] - Ys0) + c2 * (arr2[j, 2] - Zs0)) / (a3 * (arr2[j, 0] - Xs0) + b3 * (arr2[j, 1] - Ys0) + c3 * (arr2[j, 2] - Zs0)); }}//逐点计算误差方程式的系数和常数项,组成误差方程:double[,] arr5 = new double[2 * n, 6]; //------------系数矩阵(A)//1.计算dXs的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 0] = -1 / m; //-f/H == -1/m}//2.计算dYs的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 1] = -1 / m; //-f/H == -1/m}//3.a.计算误差方程式Vx中dZs的系数for (int i = 0; i < 2 * n; i += 2)arr5[i, 2] = -arr1[i] / m * f;}//3.b.计算误差方程式Vy中dZs的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 2] = -arr1[i] / m * f;}//4.a.计算误差方程式Vx中dΦ的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 3] = -f * (1 + arr1[i] * arr1[i] / f * f);}//4.a.计算误差方程式Vy中dΦ的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 3] = -arr1[i - 1] * arr1[i] / f;}//5.a.计算误差方程式Vx中dΨ的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 4] = -arr1[i] * arr1[i + 1] / f;}//5.b.计算误差方程式Vy中dΨ的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 4] = -f * (1 + arr1[i] * arr1[i] / f * f);}//6.a.计算误差方程式Vx中dk的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 5] = arr1[i + 1];}//6.b.计算误差方程式Vy中dk的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 5] = -arr1[i - 1];}//定义外方位元素组成的数组double[] arr6 = new double[6];//--------------------外方位元素改正数矩阵(X)//定义常数项元素组成的数组double[] arr7 = new double[2 * n];//-----------------常数矩阵(L)//计算lx的值for (int i = 0; i < 2 * n; i += 2)arr7[i] = arr1[i] - arr4[i]; //将近似值矩阵的元素代入}//计算ly的值for (int i = 1; i <= 2 * (n - 1); i += 2){arr7[i] = arr1[i] - arr4[i]; //将近似值矩阵的元素代入}/* 对于所有像点的坐标观测值,一般认为是等精度量测,所以权阵P为单位阵.所以X=(ATA)-1ATL *///1.计算ATdouble[,] arr5T = new double[6, 2 * n];for (int i = 0; i < 6; i++){for (int j = 0; j < 2 * n; j++){arr5T[i, j] = arr5[j, i];}}//A的转置与A的乘积,存放在arr5AA中double[,] arr5AA = new double[6, 6];for (int i = 0; i < 6; i++){for (int j = 0; j < 6; j++){arr5AA[i, j] = 0;for (int l = 0; l < 2 * n; l++){arr5AA[i, j] += arr5T[i, l] * arr5[l, j];}}}nijuzhen(arr5AA);//arr5AA经过求逆后变成原矩阵的逆矩阵//arr5AA * arr5T存在arr5AARATdouble[,] arr5AARAT = new double[6, 2 * n];for (int i = 0; i < 6; i++){for (int j = 0; j < 2 * n; j++){arr5AARAT[i, j] = 0;for (int p = 0; p < 6; p++){arr5AARAT[i, j] += arr5AA[i, p] * arr5T[p, j];}}}//计算arr5AARAT x L,存在arrX中double[] arrX = new double[6];for (int i = 0; i < 6; i++){for (int j = 0; j < 1; j++){arrX[i] = 0;for (int vv = 0; vv < 6; vv++){arrX[i] += arr5AARAT[i, vv] * arr7[vv];}}}//计算外方位元素值double Xs, Ys, Zs, Φ, Ψ, K;Xs = Xs0 + arrX[0];Ys = Ys0 + arrX[1];Zs = Zs0 + arrX[2];Φ = Φ0 + arrX[3];Ψ = Ψ0 + arrX[4];K = K0 + arrX[5];for (int i = 0; i <= 2; i++){Xs += arrX[0];Ys += arrX[1];Zs += arrX[2];Φ += arrX[3];Ψ += arrX[4];K += arrX[5];}Console.WriteLine("Xs,Ys,Zs,Φ,Ψ,K的值分别是:{0},{1},{2},{3},{4},{5}", Xs0, Ys0, Zs0, Φ, Ψ, K);Console.Read();}//求arr5AA的逆矩public static double[,] nijuzhen(double[,] a) {double[,] B = new double[6, 6];int i, j, k;int row = 0;int col = 0;double max, temp;int[] p = new int[6];for (i = 0; i < 6; i++){p[i] = i;B[i, i] = 1;}for (k = 0; k < 6; k++){//找主元max = 0; row = col = i;for (i = k; i < 6; i++){for (j = k; j < 6; j++){temp = Math.Abs(a[i, j]);if (max < temp){max = temp;row = i;col = j;}}}//交换行列,将主元调整到k行k列上if (row != k){for (j = 0; j < 6; j++){temp = a[row, j];a[row, j] = a[k, j];a[k, j] = temp;temp = B[row, j];B[row, j] = B[k, j];B[k, j] = temp;i = p[row]; p[row] = p[k]; p[k] = i; }if (col != k){for (i = 0; i < 6; i++){temp = a[i, col];a[i, col] = a[i, k];a[i, k] = temp;}}//处理for (j = k + 1; j < 6; j++){a[k, j] /= a[k, k];}for (j = 0; j < 6; j++){B[k, j] /= a[k, k];a[k, k] = 1;}for (j = k + 1; j < 6; j++){for (i = 0; j < k; i++){a[i, j] -= a[i, k] * a[k, j];}for (i = k + 1; i < 6; i++){a[i, j] -= a[i, k] * a[k, j];}}for (j = 0; j < 6; j++){for (i = 0; i < k; i++){B[i, j] -= a[i, k] * B[k, j];}for (i = k + 1; i < 6; i++){B[i, j] -= a[i, k] * B[k, j];}for (i = 0; i < 6; i++) {a[i, k] = 0;a[k, k] = 1;}}//恢复行列次序for (j = 0; j < 6; j++){for (i = 0; i < 6; i++) {a[p[i], j] = B[i, j]; }}for (i = 0; i < 6; i++){for (j = 0; j < 6; j++) {a[i, j] = a[i, j];}}return a;}4.实验结果四.实验总结此次实验让我深入了解单像空间后方交会的计算过程,加强了对空间后方交会基本公式和误差方程式,法线方程式的记忆。

单像空间后方交会实验报告(c++版)单像空间后方交会姓名:学号:时间:目录一、作业任务..................................................... - 4 -二、计算原理..................................................... - 4 -三、算法流程..................................................... - 8 -四、源程序....................................................... - 9 -五、计算结果..................................................... - 9 -六、结果分析..................................................... - 9 -七、心得与体会................................................... - 9 -八、附页......................................................... - 9 -1.c++程序.................................................. - 10 -2.C++程序截图.............................................. - 17 -3.matlb程序 ............................................... - 17 -一、 作业任务已知条件:摄影机主距f=153.24mm ,x0=0,y0=0, 像片比例尺为1:40000,有四对点的像点坐标与相应的地面坐标如下表。
空间后方交会实验报告
1 实习目的:
用Visual C++编写一个完整的单片空间后方交会程序,通过对提供的试验数据进行计算,输出像片的外方位元素并评定精度。
深入理解单片空间后方交会的原理,体会在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程。
通过上机调试程序加强动手能力的培养,通过对实验结果的分析,增强综合运用所学知识解决实际问题的能力。
2实习环境:
2.1硬件环境:window操作系统
2.2软件环境:vc++6.0
略
3实习内容:
利用一定数量的地面控制点,根据共线条件方程求解像片外方位元素:
略
4 数据准备:
4.1 已知航摄仪内方位元素f=153.24mm,Xo=Yo=0。
5实习过程:
5.1学习单张像片空间后方交会的基本理论,掌握其基本思想。
略
5.2在纸上绘出空间后方交会的计算机程序框图。
为了能够在宏观上指导我们编写程序,我们需要在草稿纸上绘出程序框图。
框图如下:
↓
↓
↓
︱
︱
︱
迭
迭
次
数
小↓完
于
限↓
差
否否↓
否︱↓是
︱
输出中间结果和出错信息↓
︱
非正常结束
6. 按照程序框图编写程序。
程序代码如下:必须有注释
7 程序结果显示
(略)
8 实习心得与总结:
略。
摄影测量学实验报告实验名称:空间后方交会班级:测绘工程12-1一.实验目的掌握运用空间后方交会求解外方元素的过程。
学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用已知公式和计算机编程语言实现空间后方交会的过程,完成外方位元素的求解。
二.实验工具个人电脑,visual basic6.0三.实验源代码Private Sub Command1_Click()Dim c(),kx(),ky(),l(),aa(),a11(),a12(),a13(),a14(),a15(),a16(), a21(),a22(),a23(),a24(),a25()Dim a26(),v(),mm(5)nn=Val(Text2.Text)nnt=nn-1ReDim c(nnt,5),kx(nnt),ky(nnt),l(2*nnt+1,0),aa(2*nnt+1,5), a11(nnt),a12(nnt),a13(nnt),a14(nnt),a15(nnt),a16(nnt),a21(nnt), a22(nnt),a23(nnt),a24(nnt),a25(nnt)ReDim a26(nnt)f=Val(Text1.Text)fei=0#w=0#k=0#If Label2.Caption=""ThenMsgBox"尚未读取文本",,"提示信息"Elsea=Split(Label2.Caption,vbCrLf)For i=0To nnthh=Split(a(i),"")For j=0To5c(i,j)=Val(hh(j))Next jNext im1=(c(0,1)-c(1,1))^2+(c(0,2)-c(1,2))^2 m2=(c(0,3)-c(1,3))^2+(c(0,4)-c(1,4))^2 m=Sqr(m2/m1)zs=m*fxs=0ys=0For i=0To nntxs=xs+c(i,3)ys=xs+c(i,4)Next ixs=xs/nnys=ys/nnDoa1=Cos(fei)*Cos(k)-Sin(fei)*Sin(w)*Sin(k)a2=-Cos(fei)*Sin(k)-Sin(fei)*Sin(w)*Cos(k)a3=-Sin(fei)*Cos(w)b1=Cos(w)*Sin(k)b2=Cos(w)*Cos(k)b3=-Sin(w)c1=Sin(fei)*Cos(k)+Cos(fei)*Sin(w)*Sin(k)c2=-Sin(fei)*Sin(k)+Cos(fei)*Sin(w)*Cos(k)c3=Cos(fei)*Cos(w)For i=0To nntkx(i)=-f*(a1*(c(i,3)-xs)+b1*(c(i,4)-ys)+c1*(c(i,5)-zs)) /(a3*(c(i,3)-xs)+b3*(c(i,4)-ys)+c3*(c(i,5)-zs))ky(i)=-f*(a2*(c(i,3)-xs)+b2*(c(i,4)-ys)+c2*(c(i,5)-zs)) /(a3*(c(i,3)-xs)+b3*(c(i,4)-ys)+c3*(c(i,5)-zs))Next iFor i=0To nntl(i*2,0)=c(i,1)-kx(i)l(i*2+1,0)=c(i,2)-ky(i)Next iFor i=0To nntzb=(a3*(c(i,3)-xs)+b3*(c(i,4)-ys)+c3*(c(i,5)-zs))a11(i)=(a1*f+a3*c(i,1))/zba12(i)=(b1*f+b3*c(i,1))/zba13(i)=(c1*f+c3*c(i,1))/zba21(i)=(a2*f+a3*c(i,2))/zba22(i)=(b2*f+b3*c(i,2))/zba23(i)=(c2*f+c3*c(i,2))/zba14(i)=c(i,2)*Sin(w)-(c(i,1)*(c(i,1)*Cos(k)-c(i,2)*Sin(k)) /f+f*Cos(k))*Cos(w)a15(i)=-f*Sin(k)-c(i,1)/f*(c(i,1)*Sin(k)+c(i,2)*Cos(k))a16(i)=c(i,2)a24(i)=-c(i,1)*Sin(w)-(c(i,2)*(c(i,1)*Cos(k)-c(i,2)*Sin(k)) /f-f*Sin(k))*Cos(w)a25(i)=-f*Cos(k)-c(i,2)/f*(c(i,1)*Sin(k)+c(i,2)*Cos(k)) a26(i)=-c(i,1)Next iFor i=0To nntaa(2*i,0)=a11(i)aa(2*i,1)=a12(i)aa(2*i,2)=a13(i)aa(2*i,3)=a14(i)aa(2*i,4)=a15(i)aa(2*i,5)=a16(i)aa(2*i+1,0)=a21(i)aa(2*i+1,1)=a22(i)aa(2*i+1,2)=a23(i)aa(2*i+1,3)=a24(i)aa(2*i+1,4)=a25(i)aa(2*i+1,5)=a26(i)Next iReDim at(5,2*nnt+1),ata(5,5),nata(5,5),nataat(5,2*nnt+1), detx(5,0)at=zhuanzhi(aa)ata=cheng(at,aa)nata=qiuni(ata)nataat=cheng(nata,at)detx=cheng(nataat,l)xs=xs+detx(0,0)ys=ys+detx(1,0)zs=zs+detx(2,0)fei=fei+detx(3,0)w=w+detx(4,0)k=k+detx(5,0)Loop Until Abs(detx(0,0))<0.000001And Abs(detx(1,0))< 0.000001And Abs(detx(2,0))<0.000001And Abs(detx(3,0))<0.000001And Abs(detx(4,0))<0.000001And Abs(detx(5,0))< 0.000001ReDim v(2*nnt+1,0),ax(2*nnt+1,0)ax=cheng(aa,detx)v=jian(ax,l)vv=0For i=0To2*nnt+1vv=v(i,0)^2+vvNext imo=Sqr(vv/(2*nn-6))For i=0To5mm(i)=mo*Sqr(nata(i,i))Next itxtshow.Text=txtshow.Text&"外方元素为中误差为"&vbCrLf&"Xs"&xs&" "&mm(0)&vbCrLf&"Ys"&ys&" "&mm(1)&vbCrLf&"Zs"&zs&" "&mm(2)&vbCrLf&"Φ"&fei&"" &mm(3)&vbCrLf&"W"&w&"" &mm(4)&vbCrLf&"K"&k&""& mm(5)&vbCrLf&vbCrLftxtshow.Text=txtshow.Text&"报告时间:"&Year(Date)&Format(Month(Date),"00")& Format(Day(Date),"00")&vbCrLftxtshow.Text=txtshow.Text&"审批人签字:"End IfEnd SubPrivate Sub Command2_Click()CommonDialog1.Filter="文档|*.txt"CommonDialog1.ShowOpenLabel1.Caption=CommonDialog1.FileNameEnd SubPrivate Sub Command3_Click()Label2.Caption=""Dim mylineIf Label1.Caption<>""ThenOpen Label1.Caption For Input As#1Do While Not EOF(1)Line Input#1,mylineLabel2.Caption=Label2.Caption+myline+vbCrLfLoopClose#1End SubPrivate Sub Command4_Click()CommonDialog1.DialogTitle="保存文件" CommonDialog1.Filter="文档|*.doc" CommonDialog1.Action=2If CommonDialog1.FileName<>""ThenOpen CommonDialog1.FileName For Output As#1 Print#1,txtshow.TextClose#1End IfEnd SubPrivate Sub Command5_Click()txtshow.Text=""End SubPrivate Sub Command6_Click()If MsgBox("确认退出程序?",68,"提示信息")=6Then EndEnd IfEnd SubPublic Function cheng(a(),b())ReDim s(UBound(a,1),UBound(b,2))If UBound(a,2)<>UBound(b,1)Then MsgBox"不符合乘法要求"EndElseFor i=0To UBound(s,1)For j=0To UBound(s,2)s(i,j)=0For Q=0To UBound(a,2)s(i,j)=Val(s(i,j))+Val(a(i,Q))*Val(b(Q,j)) Next QNext jNext icheng=sEnd IfEnd FunctionPublic Function zhuanzhi(a())Dim sReDim s(UBound(a,2),UBound(a,1))For i=0To UBound(a,1)For j=0To UBound(a,2)s(j,i)=a(i,j)Next jNext izhuanzhi=sEnd FunctionPublic Function qiuni(m())Dim s()If UBound(m,1)<>UBound(m,2)Then MsgBox("求逆错误")EndElsen=UBound(m,1)Dim e(),m1,m2,m3ReDim e(n,2*n+1)ReDim s(n,2*n+1)For i=0To nFor j=0To ne(i,j)=m(i,j)Next jNext iFor i=0To nFor j=n+1To2*n+1e(i,j)=0Next jNext iFor i=0To ne(i,n+i+1)=1 Next iFor t=0To nIf e(t,t)=0Then For i=t+1To nFor j=0To2*n+1 s(i,j)=e(i,j)e(i,j)=e(t,j)e(t,j)=s(t,j)Next jIf e(t,t)<>0Then GoTo daima1End IfNext iIf e(t,t)=0Then MsgBox("求逆错误") EndGoTo lastlineEnd Ifdaima1:m1=e(t,t)For j=0To2*n+1e(t,j)=e(t,j)/m1Next jFor i=t+1To nm2=e(i,t)For j=0To2*n+1e(i,j)=e(i,j)-m2*e(t,j) Next jNext iNext tFor t=0To n-1For i=t+1To nm3=e(t,i)For j=0To2*n+1e(t,j)=e(t,j)-m3*e(i,j) Next jNext iNext tReDim c(n,n)For i=0To nFor j=0To nc(i,j)=Round(e(i,j+n+1),2)Next jNext iqiuni=cEnd Iflastline:End FunctionPublic Function jian(a(),b())Dim s,tReDim s(UBound(a,1),UBound(a,2))If UBound(a,1)<>UBound(b,1)Or UBound(a,2)<>UBound(b,2) ThenMsgBox"不符合减法要求"EndElseFor i=0To UBound(a,1)For j=0To UBound(a,2)s(i,j)=Val(a(i,j))-Val(b(i,j))Next jNext ijian=sEnd IfEnd FunctionPrivate Sub Form_Load()Form1.Image1.Top=0Form1.Image1.Left=0Form1.Image1.Width=Form1.Width Form1.Image1.Height=Form1.Height End SubPrivate Sub Form_Resize()Form1.Image1.Top=0Form1.Image1.Left=0Form1.Image1.Width=Form1.Width Form1.Image1.Height=Form1.Height End Sub四.实验框图获取已知数据量测控制点的像点坐标确定未知数初始值五.实验数据1-0.08615-0.0689936589.4125273.322195.17 2-0.053400.0822137631.0831324.51728.69 3-0.01478-0.0766339100.9724934.982386.5 40.010460.0644340426.5430319.81757.31六.实验截图七.实验心得此次实验让我更加了解空间后方交会的计算过程,加强了对空间后方交会基本公式和误差方程式,法线方程式的记忆。
摄影测量学空间后方交会实验报告13页报告摘要:本实验以三张已知高度物体的相片为样本,运用摄影测量学的空间后方交会算法,通过MATLAB编程实现对物体三维坐标的计算,并加以检验与探讨,得出结论相对合理。
同时,本实验也通过对MATLAB编程的应用,掌握了空间后方交会算法的理论及实践方法。
1. 实验目的(1)学习和应用摄影测量学中的空间后方交会算法,掌握其计算方法和程序实现过程。
(2)了解数字像相机的相关特性,并掌握其使用方法。
(3)通过对样本数据的处理,熟悉和掌握MATLAB编程的应用技巧。
2. 实验器材数字相机一部,尺子一把,样本图像三张,MATLAB软件。
3. 实验原理在精密测量领域中,采用摄影测量学的空间后方交会算法,可实现三维坐标的测量和重建。
这种方法是将已知物体的照片,通过对像点的提取及校准,得出像点坐标系下的物体的三维坐标系下的坐标。
这种算法的基本思路是:利用像点坐标系下的物体三维坐标系下的坐标关系,构建一个误差最小的方程组,通过矩阵的求解,得到物体三维坐标系下的坐标。
数字相机是一种基于CCD或CMOS成像器材料的成像设备,根据数字信号的处理能力,合成电子图像。
数字相机的性能主要包括分辨率、感光度、曝光控制、焦距、光圈等参数。
使用数字相机拍摄时,应根据拍摄对象的光线条件、距离、尺寸、景深等因素,进行调节。
4. 实验过程(1)利用数字相机拍摄三张已知高度物体的照片,并在样本上面贴标记,用尺子测算实际高度。
(2)利用图像处理软件MATLAB,对照片进行像点识别和校准,得到像点坐标系下的坐标。
(3)根据相片中已知物体的测高值及像点坐标系下的坐标值,通过MATLAB编写空间后方交会的程序算法,得出物体的三维坐标系下的坐标。
(4)对得出的坐标值进行检验及探讨,分析误差来源及部分工具库的使用方法。
5. 实验结果与分析本实验所得出的三维坐标值,原本应是在一个确定点之间展开的点集。
知道参数计算不全或精度不够是常有的事情(尤其在没有精密测量器具的条件下),这种情况我们应该考虑从给出的角度和图像来看和计算得到位置。
实习报告一、实习目的与任务本次实习的主要目的是让同学们掌握空间后方交会的原理和方法,以及在实际工程中的应用。
通过实习,要求同学们能够独立完成空间后方交会的计算和放样工作,提高在测量、记录、计算和绘图等方面的能力。
同时,培养同学们良好的团队协作意识和个人责任感,充分认识到测量工作的科学性、精密性,引导专业素质的养成。
实习任务是在给定的控制点上,利用空间后方交会方法,测定待放样点的位置。
二、实习原理空间后方交会是一种基于多测站测量的空间位置确定方法。
它通过在多个观测站上对同一目标进行观测,利用观测数据求解目标的空间位置。
空间后方交会的基本原理是:根据已知的控制点坐标和观测数据,通过解算方程组,求解待放样点的坐标。
三、实习过程1. 准备工作:在实习开始前,同学们先学习了有关空间后方交会的理论知识,了解了其原理和操作方法。
然后,指导老师向同学们讲解了实习的具体任务和注意事项,强调了测量工作的精确性和严谨性。
2. 实习实施:同学们分成若干小组,每组负责一部分放样任务。
在实际操作中,同学们严格遵循测量规范,使用经纬仪、全站仪等测量仪器,进行测站设置、观测和数据记录。
3. 数据处理:观测完成后,同学们利用空间后方交会原理,对观测数据进行处理,求解待放样点的位置。
在数据处理过程中,同学们充分运用所学的数学知识和计算方法,严格把控计算过程中的每一个环节。
4. 成果检查:为了确保放样结果的准确性,同学们对放样成果进行了严格的检查。
检查内容包括坐标精度、高程误差等方面。
对于发现的问题,同学们及时进行修正,确保放样成果满足工程要求。
四、实习收获与体会通过本次实习,同学们掌握了空间后方交会的基本原理和操作方法,提高了在测量、记录、计算和绘图等方面的能力。
实习过程中,同学们充分认识到测量工作的科学性、精密性,培养了良好的团队协作意识和个人责任感。
同时,实习也让同学们明白了测量工作在工程建设中的重要性。
测量放样的精确性直接影响到工程的质量和进度,因此,作为一名测绘工程专业的学生,我们要不断提高自己的专业素质,为我国工程建设贡献力量。
第12卷 第3期2004年9月 山东交通学院学报JOUR NAL OF SHANDON G JIAOTON G UNIVERSITY Vol .12No .3 Sep .2004后方交会方法及其精度评定问题的研究朱宝训,刘成龙,杨天宇(西南交通大学 土木工程学院,四川成都 610031)摘要:基于3个已知点的后方交会,推导了测角、测边后方交会的近似精度评定公式以及针对起算数据误差时的严密精度评定公式,并用间接平差方法对边角同测后方交会进行了严密的平差计算与精度评定;通过观测实验分别对测角、测边、边角同测后方交会的精度及坐标进行了比较分析。
关 键 词:后方交会;测边;测角;边角;起算数据误差中图分类号:TU198 文献标识码:A文章编号:1672-0032(2004)03-0026-04在工程测量中,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法之一。
传统的后方交会是以测角为主,随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用。
目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算问题以及它们的精度评定问题。
文献[1]、[2]分别对两个已知点边角同测的精度进行了探讨,本文以常用的3个已知点的后方交会为例,研究合理的后方交会坐标计算及其精度评定方法,并通过实验分别对测角、测边、边角同测后方交会的精度及坐标进行了比较分析。
1 测角后方交会如图1所示,已知A ,B ,C 点的坐标A (x A ,y A ),B (x B ,y B ),C (x C ,y C ),观测角度α,β,求待定点P 的坐标P (x P ,y P )。
图1 后方交会示意图因3个已知点的测角后方交会问题无多余观测,求P 点坐标的计算公式为[3]:x P =x B +Δx BP ,y P =y B +Δy BP ,式中 Δy BP =Δx BP tan αBP ,Δx BP =(y B -y A )(cot α-tan αBP )-(x B -x A )(1+c ot αtan αBP )1+tan αBP,其中 tan αBP =(y B -y A )cot α+(y B -y C )cot β+(x A -x C )(x B -x A )cot α+(x B -x C )cot β-(y A -y C ).求得不考虑原始数据误差影响时P 点在X ,Y 方向的坐标精度评定公式分别为:m 2x P=(F 1+ F 2)2m 2αρ2+(φF 2)2m 2βρ2,m 2y P=[(F 1tan αBP + (F 2tan αBP +Δx BP )]2m 2αρ2+[φ(F 2tan αBP +Δx BP )]2m 2βρ2,式中 F 1=Δx AB tan αBP -Δy A B (1+tan 2αBP )sin 2α,F 2=-2Δx BP tan αBP +Δy AB +Δx AB cot α1+tan 2αBP,ρ=206265(″), =M Δx AB -N Δy A B N 2sin 2α,φ=M Δx CB -N Δy CB N 2sin 2β, 收稿日期:2004-06-08 作者简介:朱宝训(1974-),男,山东日照人,西南交通大学硕士研究生.其中 M =(y B -y A )cot α+(y B -y C )c ot β+(x A -x C ),N =(x B -x A )cot α+(x B -x C )cot β-(y A -y C ).考虑原始数据误差影响时P 点在X ,Y 方向的坐标精度评定公式分别为m 2x ′P =(F 2a 1-n l )2m 2x A +(F 2a 2-m l )2m 2y A +(1+F 2a 3+n l)2m 2x B +(F 2a 4+m l)2m 2y B +(F 2a 5)2m 2x C +(F 2a 6)2m 2y C +m 2x P ,m 2y ′P =(ωa 1-tan αBP n l )2m 2x A +(ωa 2-tan αBP m l )2m 2y A +(ωa 3+tan αBP n l)2m 2x B +(1+ωa 4+tan αBP m l)2m 2y B +(ωa 5)2m 2x C +(ωa 6)2m 2y C +m 2y P ,式中 ω=F 2tan αBP +Δx BP ,a 1=M cot α+N N 2,a 2=M -N cot αN 2,a 3=-M (cot α+cot β)N2,a 4=(cot α+cot β)N ,a 5=M cot β-N N 2,a 6=-N c ot β+M N2,m =cot α-tan αBP ,n =1+c ot αtan αBP ,l =1+tan 2αBP .2 测边后方交会图1中,S 1,S 2,S 3为已知点构成的三角形的边,L 1,L 2,L 3为观测边,∠1、∠2为辅助角,求待定点的坐标P (x P ,y P )。
后方交会在施工测量中的应用与分析(图文)后方交会法是测量学中广泛应用的一种几何测量方法,它可以用于对已知控制点的坐标及其相对位置关系进行测量,以推算待测对象的坐标。
在施工测量中,后方交会法常用于测量建筑物、道路、桥梁、隧道等工程结构的坐标,以保证这些结构的建造精度和安全性。
本文将介绍后方交会法在施工测量中的应用及其分析。
什么是后方交会法后方交会法是测量学中一种基本的几何测量方法,它利用已知控制点的坐标及其相对位置关系,通过测量目标物体上特定点的定向角、仰角和水平距离,从而推算出目标点的空间坐标。
后方交会法的基本步骤包括:观测控制点,计算控制点坐标,测量特定目标点的定向角、仰角和水平距离,推算目标点坐标,最后通过重算检查误差,保证准确性。
后方交会法的主要优点在于:适用范围广,可用于较大的空间距离,操作简便,精度高。
后方交会法在施工测量中的应用后方交会法在施工测量中的应用范围广泛,通常用于以下情况:1.建筑结构的定位和测量。
后方交会法可以用于建筑物立面的测量,如门、窗、墙角等标志性结构的位置和高度测量。
此外,后方交会法可用于逐层扫描建筑物自上而下的高程数据收集,以获取建筑物的立体信息。
2.道路、桥梁、隧道等工程结构的坐标测量。
后方交会法可用于收集地球表面上的架桥点坐标,以及地面各点之间的相对位置关系;同时,也可用于隧道和地下建筑物的GPS定位和导向。
3.土地测量。
后方交会法可用于土地界址的位置识别和土地面积的测量。
后方交会法在施工测量中的分析后方交会法在施工测量中的具体应用需要进行相应的分析,主要包括三个方面:观测条件的分析后方交会法在施工测量中需要满足一定的观测条件,观测条件的不同会对测量结果带来不同的影响。
例如,观测点数量的不足、观测角度的不合理等因素都会降低测量结果的精度。
因此,在施工测量前需要进行观测条件的充分分析,并选择合适的设备和方案。
推算过程的优化后方交会法在施工测量中的推算过程需要进行优化,以提高测量精度。
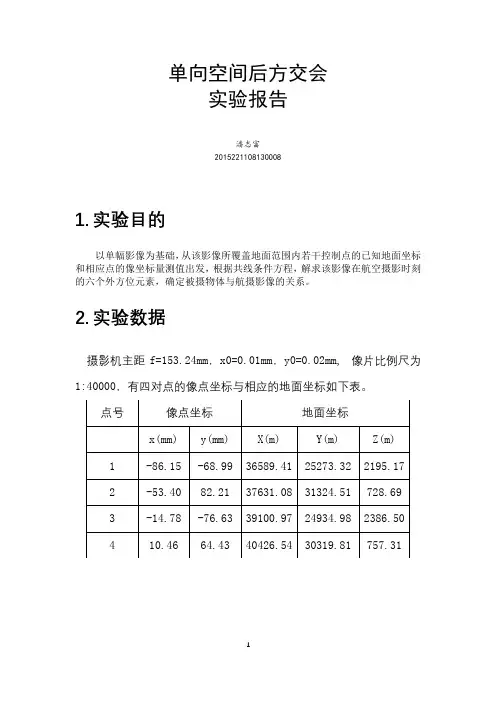
单向空间后方交会实验报告潘志富20152211081300081.实验目的以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的六个外方位元素,确定被摄物体与航摄影像的关系。
2.实验数据摄影机主距f=153.24mm,x0=0.01mm,y0=0.02mm, 像片比例尺为1:40000,有四对点的像点坐标与相应的地面坐标如下表。
3. 算法流程(1)获取已知数据。
从航摄资料中差取平均航高与摄影机主距;获取控制点的地面测量坐标并转换为地面摄影坐标。
(2)量测控制点的像点坐标并作系统误差改正。
(3)确定未知数的初始值。
在竖直摄影且地面控制点大体对称分布的情况下,按如下方法确定初始值,即n X X S ∑=0,n Y Y S ∑=0,∑+=Z nmf Z S 100000===κωϕ(4)用三个角元素的初始值按下式,计算各个方向余弦值,组成旋转矩阵R ωϕκωϕκϕκωϕκϕωκωκωωϕκωϕκϕκωϕκϕcos cos cos sin cos sin sin sin sin cos cos sin sin cos cos sin cos cos sin cos sin sin sin cos sin sin sin cos cos 321321321=+-=+=-===-=--=-=c c c b b b a a a(5)逐点计算像点坐标的近似值。
利用未知数的近似值和控制点的地面坐标;带入共线方程式,逐点近似像点坐标的近似值(x )、(y )。
(6)逐点计算误差方程式的系数和常数项,组成误差方程式。
(7)计算法方程的系数矩阵A A T 和常数项L A L ,组成法方程式。
(8) 解法方程,求得外方位元素的改正数κωϕd d d d d d 、、、、、S S S Z Y X 。
(9)用前次迭代取得的近似值,加本次迭代的改正数,计算外方位元素的新值。
单像空间后方交会实习报告单像空间后方交会实习报告一、引言空间后方交会是摄影测量学中的一项重要内容,它能通过对已知控制点的旁边影像进行分析和计算,确定未知控制点的空间坐标,这在地图制作、城市规划、工程测量等领域有着广泛的应用。
本次实习旨在通过实际操作掌握空间后方交会的方法和技巧,进一步加深对摄影测量学的理解,并提升实际操作能力。
二、实习目的1. 学习空间后方交会的理论知识,了解其基本原理和计算方法。
2. 掌握使用数字相机采集控制点及待测控制点影像的技巧。
3. 熟练使用后方交会软件进行影像的处理和计算,得到待测控制点的空间坐标。
4. 分析实际数据的精度和误差,评估后方交会结果的可靠性。
三、实习过程1. 准备工作在实习开始前,我们需要准备好数字相机、相机标定板以及控制点和待测控制点的影像。
同时还需要安装并熟悉后方交会软件,以便后续处理和计算。
2. 影像采集首先,在实地选取控制点和待测控制点,并采用全站仪等测量仪器获取其地面坐标。
接着,通过相机标定板进行相机标定,获取相机内外参数。
然后,使用数字相机对控制点和待测控制点进行影像采集。
为了减小误差,我们要保证相机的光心与全站仪的标尺中心对准,并使用三脚架固定相机。
3. 影像的处理和计算将采集到的影像导入到后方交会软件中,根据相机内外参数和控制点的地面坐标,进行畸变校正和像点坐标的提取。
接下来,通过自动或手动方法选取控制点和待测控制点进行像点匹配。
通过匹配的像点坐标和已知控制点的地面坐标,利用后方交会公式进行计算,得到待测控制点的空间坐标。
4. 结果分析和评估对得到的结果进行精度分析,并评估其可靠性。
通过对比实测控制点的地面坐标与计算得到的空间坐标,计算精度检查,进一步评估后方交会结果的准确性。
同时,还要检查影像的质量和匹配的像点之间的差异,排除控制点标定、像点提取或匹配过程中出现的问题。
四、实习总结通过这次实习,我对空间后方交会的理论知识和实际操作有了更深入的了解。
一、实习目的本次实习的主要目的是通过单张影像的空间后方交会算法,掌握摄影测量学中的基本原理和方法,培养实际操作能力和理论联系实际的能力。
通过实习,要求学生了解空间后方交会的概念、原理和计算方法,熟练运用相关软件进行空间后方交会的实际操作,并对结果进行分析和评定。
二、实习内容1. 了解空间后方交会的基本概念:空间后方交会是一种摄影测量方法,通过分析单张影像上若干个控制点的地面坐标和像坐标,利用共线条件方程,求解影像的外方位元素。
2. 学习空间后方交会的原理:影像上的控制点与相机镜头中心形成共线方程,通过最小二乘法求解影像的外方位元素。
外方位元素包括六个参数:三个表示相机在三维空间中的位置,三个表示相机在三维空间中的姿态。
3. 掌握空间后方交会的计算方法:利用共线条件方程,通过最小二乘法求解外方位元素。
计算过程中需要注意控制点的选择、权重的分配和迭代求解的精度。
4. 熟悉空间后方交会的实际操作:使用相关软件(如MATLAB、ERDAS IMAGINE等)进行空间后方交会的实际操作,包括数据的输入、参数的设置和结果的输出。
5. 结果分析和评定:对空间后方交会的结果进行分析和评定,包括计算精度、误差分析和结果的可信度。
三、实习过程1. 理论学习和讨论:在学习空间后方交会的基本概念和原理的基础上,进行小组讨论,理解并掌握空间后方交会的计算方法。
2. 软件操作练习:在老师的指导下,使用相关软件进行空间后方交会的实际操作,熟悉软件的操作界面和功能。
3. 数据处理和计算:根据实习提供的数据,进行空间后方交会的计算,包括控制点的选择、权重的分配和迭代求解的过程。
4. 结果分析和评定:对空间后方交会的结果进行分析和评定,计算精度、误差分析和结果的可信度。
四、实习总结通过本次实习,我对空间后方交会的基本概念、原理和计算方法有了更深入的了解,掌握了相关软件的操作方法,并能够进行空间后方交会的实际操作。
在实习过程中,我学会了如何选择控制点、分配权重和判断迭代求解的精度。
空间后方交会实习报告一、实习目的与任务本次实习的主要目的是让我们了解并掌握空间后方交会的基本原理和方法,通过实际操作,提高我们处理空间数据的能力。
实习任务是在给定的控制点坐标和观测数据的基础上,利用空间后方交会原理,求解待求点的位置坐标。
二、实习内容与过程1. 实习准备:首先,我们学习了空间后方交会的基本原理,了解了其数学模型和计算方法。
然后,我们了解了实习所使用的软件工具,并掌握了基本操作方法。
2. 数据处理:我们根据给定的控制点坐标和观测数据,利用软件进行数据输入和处理。
在这个过程中,我们学会了如何处理观测数据,如何检查数据质量,以及如何进行数据平差。
3. 成果分析:通过空间后方交会计算,我们得到了待求点的位置坐标。
我们对比了不同参数设置下的计算结果,分析了参数设置对计算结果的影响。
同时,我们还进行了精度分析,评估了计算结果的精度。
三、实习心得与体会1. 通过本次实习,我们深入理解了空间后方交会的基本原理和计算方法,掌握了数据处理的基本技能。
2. 我们学会了如何利用软件工具进行空间数据处理,提高了我们的实际操作能力。
3. 通过成果分析和精度分析,我们了解了参数设置对计算结果的影响,提高了我们的数据分析能力。
4. 本次实习让我们认识到,空间数据处理是一个复杂的过程,需要仔细的分析和处理。
我们学会了如何检查数据质量,如何处理数据异常,以及如何评估计算结果的精度。
四、实习总结通过本次实习,我们对空间后方交会有了更深入的了解,提高了我们的空间数据处理能力。
同时,我们也认识到,空间数据处理是一个需要细致入微的工作,需要我们不断提高自己的专业素养和实际操作能力。
在今后的学习和工作中,我们将不断努力,提高自己的专业水平,为我国的空间数据处理事业做出贡献。
摄影测量学实验报告实验名称:空间后方交会班级:测绘工程12-1一.实验目的掌握运用空间后方交会求解外方元素的过程。
学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用已知公式和计算机编程语言实现空间后方交会的过程,完成外方位元素的求解。
二.实验工具个人电脑,visual basic 6.0三.实验源代码Private Sub Command1_Click()Dim c(), kx(), ky(), l(), aa(), a11(), a12(), a13(), a14(), a15(), a16(), a21(), a22(), a23(), a24(), a25()Dim a26(), v(), mm(5)nn = Val(Text2.Text)nnt = nn - 1ReDim c(nnt, 5), kx(nnt), ky(nnt), l(2 * nnt + 1, 0), aa(2 * nnt + 1, 5), a11(nnt), a12(nnt), a13(nnt), a14(nnt), a15(nnt), a16(nnt), a21(nnt), a22(nnt), a23(nnt), a24(nnt), a25(nnt)ReDim a26(nnt)f = Val(Text1.Text)fei = 0#w = 0#k = 0#If Label2.Caption = "" ThenMsgBox "尚未读取文本", , "提示信息"Elsea = Split(Label2.Caption, vbCrLf)For i = 0 To nnthh = Split(a(i), " ")For j = 0 To 5c(i, j) = Val(hh(j))Next jNext im1 = (c(0, 1) - c(1, 1)) ^ 2 + (c(0, 2) - c(1, 2)) ^ 2 m2 = (c(0, 3) - c(1, 3)) ^ 2 + (c(0, 4) - c(1, 4)) ^ 2 m = Sqr(m2 / m1)zs = m * fxs = 0ys = 0For i = 0 To nntxs = xs + c(i, 3)ys = xs + c(i, 4)Next ixs = xs / nnys = ys / nnDoa1 = Cos(fei) * Cos(k) - Sin(fei) * Sin(w) * Sin(k)a2 = -Cos(fei) * Sin(k) - Sin(fei) * Sin(w) * Cos(k)a3 = -Sin(fei) * Cos(w)b1 = Cos(w) * Sin(k)b2 = Cos(w) * Cos(k)b3 = -Sin(w)c1 = Sin(fei) * Cos(k) + Cos(fei) * Sin(w) * Sin(k)c2 = -Sin(fei) * Sin(k) + Cos(fei) * Sin(w) * Cos(k)c3 = Cos(fei) * Cos(w)For i = 0 To nntkx(i) = -f * (a1 * (c(i, 3) - xs) + b1 * (c(i, 4) - ys) + c1 * (c(i, 5) - zs)) / (a3 * (c(i, 3) - xs) + b3 * (c(i, 4) - ys) + c3 * (c(i, 5) - zs))ky(i) = -f * (a2 * (c(i, 3) - xs) + b2 * (c(i, 4) - ys) + c2 * (c(i, 5) - zs)) / (a3 * (c(i, 3) - xs) + b3 * (c(i, 4) - ys) + c3 * (c(i, 5) - zs))Next iFor i = 0 To nntl(i * 2, 0) = c(i, 1) - kx(i)l(i * 2 + 1, 0) = c(i, 2) - ky(i)Next iFor i = 0 To nntzb = (a3 * (c(i, 3) - xs) + b3 * (c(i, 4) - ys) + c3 * (c(i, 5) - zs))a11(i) = (a1 * f + a3 * c(i, 1)) / zba12(i) = (b1 * f + b3 * c(i, 1)) / zba13(i) = (c1 * f + c3 * c(i, 1)) / zba21(i) = (a2 * f + a3 * c(i, 2)) / zba22(i) = (b2 * f + b3 * c(i, 2)) / zba23(i) = (c2 * f + c3 * c(i, 2)) / zba14(i) = c(i, 2) * Sin(w) - (c(i, 1) * (c(i, 1) * Cos(k) - c(i, 2) * Sin(k)) / f + f * Cos(k)) * Cos(w)a15(i) = -f * Sin(k) - c(i, 1) / f * (c(i, 1) * Sin(k) + c(i, 2) * Cos(k))a16(i) = c(i, 2)a24(i) = -c(i, 1) * Sin(w) - (c(i, 2) * (c(i, 1) * Cos(k) - c(i, 2) * Sin(k)) / f - f * Sin(k)) * Cos(w)a25(i) = -f * Cos(k) - c(i, 2) / f * (c(i, 1) * Sin(k) + c(i, 2) * Cos(k))a26(i) = -c(i, 1)Next iFor i = 0 To nntaa(2 * i, 0) = a11(i)aa(2 * i, 1) = a12(i)aa(2 * i, 2) = a13(i)aa(2 * i, 3) = a14(i)aa(2 * i, 4) = a15(i)aa(2 * i, 5) = a16(i)aa(2 * i + 1, 0) = a21(i)aa(2 * i + 1, 1) = a22(i)aa(2 * i + 1, 2) = a23(i)aa(2 * i + 1, 3) = a24(i)aa(2 * i + 1, 4) = a25(i)aa(2 * i + 1, 5) = a26(i)Next iReDim at(5, 2 * nnt + 1), ata(5, 5), nata(5, 5), nataat(5, 2 * nnt + 1), detx(5, 0)at = zhuanzhi(aa)ata = cheng(at, aa)nata = qiuni(ata)nataat = cheng(nata, at)detx = cheng(nataat, l)xs = xs + detx(0, 0)ys = ys + detx(1, 0)zs = zs + detx(2, 0)fei = fei + detx(3, 0)w = w + detx(4, 0)k = k + detx(5, 0)Loop Until Abs(detx(0, 0)) < 0.000001 And Abs(detx(1, 0)) < 0.000001 And Abs(detx(2, 0)) < 0.000001 And Abs(detx(3, 0)) <0.000001 And Abs(detx(4, 0)) < 0.000001 And Abs(detx(5, 0)) < 0.000001ReDim v(2 * nnt + 1, 0), ax(2 * nnt + 1, 0)ax = cheng(aa, detx)v = jian(ax, l)vv = 0For i = 0 To 2 * nnt + 1vv = v(i, 0) ^ 2 + vvNext imo = Sqr(vv / (2 * nn - 6))For i = 0 To 5mm(i) = mo * Sqr(nata(i, i))Next itxtshow.Text = txtshow.Text & "外方元素为中误差为" & vbCrLf & "Xs " & xs & " " & mm(0) & vbCrLf & "Ys " & ys & " " & mm(1) & vbCrLf & "Zs " & zs & " " & mm(2) & vbCrLf & "Φ" & fei & " " & mm(3) & vbCrLf & "W " & w & " " & mm(4) & vbCrLf & "K " & k & " " & mm(5) & vbCrLf & vbCrLftxtshow.Text = txtshow.Text & " 报告时间:" & Year(Date) & Format(Month(Date), "00") & Format(Day(Date), "00") & vbCrLftxtshow.Text = txtshow.Text & " 审批人签字:"End IfEnd SubPrivate Sub Command2_Click()CommonDialog1.Filter = "文档|*.txt"CommonDialog1.ShowOpenLabel1.Caption = CommonDialog1.FileNameEnd SubPrivate Sub Command3_Click()Label2.Caption = ""Dim mylineIf Label1.Caption <> "" ThenOpen Label1.Caption For Input As #1Do While Not EOF(1)Line Input #1, mylineLabel2.Caption = Label2.Caption + myline + vbCrLfLoopClose #1End SubPrivate Sub Command4_Click()CommonDialog1.DialogTitle = "保存文件" CommonDialog1.Filter = "文档|*.doc" CommonDialog1.Action = 2If CommonDialog1.FileName <> "" ThenOpen CommonDialog1.FileName For Output As #1Print #1, txtshow.TextClose #1End IfEnd SubPrivate Sub Command5_Click()txtshow.Text = ""End SubPrivate Sub Command6_Click()If MsgBox("确认退出程序?", 68, "提示信息") = 6 Then EndEnd IfEnd SubPublic Function cheng(a(), b())ReDim s(UBound(a, 1), UBound(b, 2))If UBound(a, 2) <> UBound(b, 1) Then MsgBox "不符合乘法要求"EndElseFor i = 0 To UBound(s, 1)For j = 0 To UBound(s, 2)s(i, j) = 0For Q = 0 To UBound(a, 2)s(i, j) = Val(s(i, j)) + Val(a(i, Q)) * Val(b(Q, j)) Next QNext jNext icheng = sEnd IfEnd FunctionPublic Function zhuanzhi(a())Dim sReDim s(UBound(a, 2), UBound(a, 1))For i = 0 To UBound(a, 1)For j = 0 To UBound(a, 2)s(j, i) = a(i, j)Next jNext izhuanzhi = sEnd FunctionPublic Function qiuni(m())Dim s()If UBound(m, 1) <> UBound(m, 2) Then MsgBox ("求逆错误")EndElsen = UBound(m, 1)Dim e(), m1, m2, m3ReDim e(n, 2 * n + 1)ReDim s(n, 2 * n + 1)For i = 0 To nFor j = 0 To ne(i, j) = m(i, j)Next jNext iFor i = 0 To nFor j = n + 1 To 2 * n + 1e(i, j) = 0Next jNext iFor i = 0 To ne(i, n + i + 1) = 1 Next iFor t = 0 To nIf e(t, t) = 0 ThenFor i = t + 1 To nFor j = 0 To 2 * n + 1 s(i, j) = e(i, j)e(i, j) = e(t, j)e(t, j) = s(t, j)Next jIf e(t, t) <> 0 Then GoTo daima1End IfNext iIf e(t, t) = 0 Then MsgBox ("求逆错误") EndGoTo lastlineEnd Ifdaima1:m1 = e(t, t)For j = 0 To 2 * n + 1e(t, j) = e(t, j) / m1Next jFor i = t + 1 To nm2 = e(i, t)For j = 0 To 2 * n + 1e(i, j) = e(i, j) - m2 * e(t, j) Next jNext iNext tFor t = 0 To n - 1For i = t + 1 To nm3 = e(t, i)For j = 0 To 2 * n + 1e(t, j) = e(t, j) - m3 * e(i, j) Next jNext iNext tReDim c(n, n)For i = 0 To nFor j = 0 To nc(i, j) = Round(e(i, j + n + 1), 2)Next jNext iqiuni = cEnd Iflastline:End FunctionPublic Function jian(a(), b())Dim s, tReDim s(UBound(a, 1), UBound(a, 2))If UBound(a, 1) <> UBound(b, 1) Or UBound(a, 2) <> UBound(b, 2) ThenMsgBox "不符合减法要求"EndElseFor i = 0 To UBound(a, 1)For j = 0 To UBound(a, 2)s(i, j) = Val(a(i, j)) - Val(b(i, j))Next jNext ijian = sEnd IfEnd FunctionPrivate Sub Form_Load()Form1.Image1.Top = 0Form1.Image1.Left = 0Form1.Image1.Width = Form1.Width Form1.Image1.Height = Form1.Height End SubPrivate Sub Form_Resize()Form1.Image1.Top = 0Form1.Image1.Left = 0Form1.Image1.Width = Form1.Width Form1.Image1.Height = Form1.Height End Sub四.实验框图获取已知数据量测控制点的像点坐标确定未知数初始值五.实验数据1 -0.08615 -0.06899 36589.41 25273.32 2195.172 -0.05340 0.08221 37631.08 31324.51 728.693 -0.01478 -0.07663 39100.97 24934.98 2386.54 0.01046 0.06443 40426.54 30319.81 757.31 六.实验截图七.实验心得此次实验让我更加了解空间后方交会的计算过程,加强了对空间后方交会基本公式和误差方程式,法线方程式的记忆。
空间后方交会实验报告1. 引言空间后方交会是一种常用的测量手段,用于确定目标在空间中的坐标位置。
本实验旨在通过空间后方交会实验,了解空间测量的基本原理和方法,并锻炼我们的观察、计算和推理能力。
2. 实验目的- 学习和掌握空间后方交会实验的基本原理和步骤;- 熟悉使用测量仪器和处理数据的方法;- 锻炼团队合作和问题解决能力。
3. 实验原理空间后方交会利用多个测量设备,通过测量目标物体在不同位置上的观测数据,计算出目标物体的空间坐标。
主要基于以下原理:- 多点定位原理:通过多次测量目标物体在不同位置上的观测数据,可以确定目标物体的坐标位置;- 观测误差校正原理:由于观测仪器的误差存在,需要对观测数据进行误差校正,以提高测量精度。
4. 实验步骤4.1 实验准备- 确定实验区域,搭建固定的测量基准点;- 使用全站仪对测量基准点进行校准,确保测量精度;- 准备至少三个可移动的晶体棱镜,用于固定在目标物体上;- 准备笔记本电脑和相应的测量软件,用于数据处理和计算。
4.2 实验操作1. 将晶体棱镜固定在目标物体上,并确定测量的起始位置;2. 使用全站仪测量目标物体在不同位置上的观测数据,包括水平角、垂直角和斜距;3. 将观测数据导入计算软件,并进行误差校正;4. 根据误差校正后的观测数据,计算目标物体的空间坐标;5. 重复步骤2至4,获得更多的观测数据,以提高计算精度;6. 对多次观测结果进行平均计算,得到最终的目标物体空间坐标;7. 将计算结果进行分析和评估,确定测量精度和可靠度。
5. 实验结果与讨论经过实验操作和数据处理,获得了目标物体的空间坐标。
通过对测量结果的分析和比较,可以得出以下结论:- 目标物体的空间坐标可以通过空间后方交会实验进行测量和计算;- 观测数据的误差校正对测量结果的精度和可靠度具有重要影响;- 重复观测和平均计算可以提高测量结果的准确性。
6. 实验总结空间后方交会实验是一种常用的测量手段,可以用于测量目标物体在空间中的坐标位置。
摄影测量实验报告(空间后⽅交会—前⽅交会)空间后⽅交会-空间前⽅交会程序编程实验⼀.实验⽬的要求掌握运⽤空间后⽅交会-空间前⽅交会求解地⾯点的空间位置。
学会运⽤空间后⽅交会的原理,根据所给控制点的地⾯摄影测量坐标系坐标以及相应的像平⾯坐标系中的坐标,利⽤计算机编程语⾔实现空间后⽅交会的过程,完成所给像对中两张像⽚各⾃的外⽅位元素的求解。
然后根据空间后⽅交会所得的两张像⽚的内外⽅位元素,利⽤同名像点在左右像⽚上的坐标,求解其对应的地⾯点在摄影测量坐标系中的坐标,并完成精度评定过程,利⽤计算机编程语⾔实现此过程。
⼆.仪器⽤具计算机、编程软件(MATLAB)三.实验数据实验数据包含四个地⾯控制点(GCP)的地⾯摄影测量坐标及在左右像⽚中的像平⾯坐标。
此四对坐标运⽤最⼩⼆乘法求解左右像⽚的外⽅位元素,即完成了空间后⽅的过程。
另外还给出了5对地⾯点在左右像⽚中的像平⾯坐标和左右像⽚的内⽅位元素。
实验数据如下:内⽅位元素:f=152.000mm,x0=0,y0=0四.实验框图此过程完成空间后⽅交会求解像⽚的外⽅位元素,其中改正数⼩于限差(0.00003,相当于0.1’的⾓度值)为⽌。
在这个过程中采⽤迭代的⽅法,是外⽅位元素逐渐收敛于理论值,每次迭代所得的改正数都应加到上⼀次的初始值之中。
确定Xs,Ys,Zs的初始值时,对于左⽚可取地⾯左边两个GCP的坐标的平均值作为左⽚Xs 和Ys的初始值,取右边两个GCP 的坐标平均值作为右⽚Xs 和Ys的初始值。
Zs可取地⾯所有GCP的Z坐标的平均值再加上航⾼。
空间前⽅交会的数学模型为:五.实验源代码function Main_KJQHFJH()global R g1 g2 m G a c b1 b2;m=10000;a=5;c=4;feval(@shuru); %调⽤shuru()shurujcp()函数完成像点及feval(@shurujcp); %CCP有关数据的输⼊XYZ=feval(@MQZqianfangjh); %调⽤MQZqianfangjh()函数完成空间前⽅、%%%%%% 单位权中误差%%%% %后⽅交会计算解得外⽅位元素global V1 V2; %由于以上三个函数定义在外部⽂件中故需VV=[]; %⽤feval()完成调⽤过程for i=1:2*cVV(i)=V1(i);VV(2*i+1)=V2(i);endm0=sqrt(VV*(VV')/(2*c-6));输⼊GCP像点坐标及地⾯摄影测量坐标系坐标的函数和输⼊所求点像点坐标函数:function shurujcp()global c m;m=input('摄影⽐例尺:'); %输⼊GCP像点坐标数据函数并分别将其c=input('GCP的总数='); % 存⼊到不同的矩阵之中disp('GCP左⽚像框标坐标:');global g1;g1=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g1(i,1)=m;g1(i,2)=n;i=i+1;enddisp('GCP右⽚像框标坐标:');global g2;g2=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g2(i,1)=m;g2(i,2)=n;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function shuru()global a;a=input('计算总像对点数='); %完成想计算所需的像平⾯坐标global b1; %坐标输⼊,存⼊不同的矩阵中b1=zeros(a,2); disp('左⽚像点坐标:')i=1;while i<=am=input('x=');n=input('y=');b1(i,1)=m;b1(i,2)=n;i=i+1;end%%b2=zeros(a,2);disp('右⽚像点坐标:')i=1;while i<=am=input('x=');n=input('y=');b2(i,1)=m;b2(i,2)=n;i=i+1;end%%global c;c=input('GCP的总数=');disp('GCP摄影测量系坐标:')global G;G=zeros(3,c);i=1;while i<=cm=input('X=');n=input('Y=');v=input('Z=');G(i,1)=m;G(i,2)=n;G(i,3)=v;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间前⽅交会和后⽅交会函数:function XYZ=MQZqianfangjh()global R1 R2 a f b1 b2 Ra Rb;global X1 X2;R1=Ra;R2=Rb;R1=zeros(3,3);R2=zeros(3,3);global g1 g2 G V1 V2 V WF c QXX QXX1 QXX2;xs0=(G(1,1)+G(3,1))/2;ys0=(G(1,2)+G(3,2))/2;[Xs1,Ys1,Zs1,q1,w1,k1 R]=houfangjh(g1,xs0,ys0); %对左⽚调⽤后⽅交会函数R1=R;V1=V;WF1=WF;save '左⽚外⽅位元素为.txt' WF -ascii %将计算所得的外⽅位元素存⼊到.txt% ⽂件中for i=1:cg1(i,1)=g1(i,1)+V1(2*i-1);g1(i,2)=g1(i,2)+V1(2*i);endsave '左⽚像点坐标.txt' g1 -asciixs0=(G(2,1)+G(4,1))/2;ys0=(G(2,2)+G(4,2))/2;[Xs2,Ys2,Zs2,q2,w2,k2 R]=houfangjh(g2,xs0,ys0); %对右⽚调⽤后⽅交会函数R2=R; V2=V;WF2=WF;QXX2=QXX;save '右⽚外⽅位元素为.txt' WF –ascii %将计算所得的外⽅位元素存⼊到.txt% ⽂件中for i=1:cg2(i,1)=g2(i,1)+V2(2*i-1);g2(i,2)=g2(i,2)+V2(2*i);endsave '右⽚像点坐标.txt' g2 -asciiX1=zeros(a,3);X2=zeros(a,3);xx=zeros(3,1);xxx=zeros(3,1);for i=1:ass=[b1(i,1);b1(i,2);-f];dd=[b2(i,1);b2(i,2);-f];xx=R1*ss;X1(i,:)=xx';xxx=R2*dd;X2(i,:)=xxx';endglobal Xs1 Xs2 Ys1 Ys2 Zs1 Zs2;BX=Xs2-Xs1;BY=Ys2-Ys1;BZ=Zs2-Zs1;global N1 N2;N1=zeros(1,a);N2=zeros(1,a);for i=1:aN1(1,i)=(BX*X2(i,3)-BZ*X2(i,1))/(X1(i,1)*X2(i,3)-X2(i,1)*X1(i,3));N2(1,i)=(BX*X1(i,3)-BZ*X1(i,1))/(X1(i,1)*X2(i,3)-X2(i,1)*X1(i,3));end %计算投影系数,并计算五点的三维坐标global XYZ;XYZ=zeros(a,3);for i=1:aXYZ(i,1)=Xs1+N1(1,i)*X1(i,1);XYZ(i,2)=((Ys1+N1(1,i)*X1(i,2))+(Ys2+N2(1,i)*X2(i,2)))/2;enddisp('左⽚外⽅位元素为:Xs Ys Zs ψωκ');disp(WF1);disp('左⽚外⽅位元素协因素阵为:');disp(QXX1);disp('左⽚像点坐标为:')disp(g1)disp('右⽚外⽅位元素为:Xs Ys Zs ψωκ');disp(WF2);disp('右⽚外⽅位元素协因素阵为:')disp(QXX2)disp('右⽚像点坐标为:')disp(g2)disp('计算所得点摄影测量坐标(X,Y,Z)为:');disp(XYZ);save 'XYZ.txt' XYZ -ascii %将计算所得结果保存到XYZ.txt⽂件中%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Xs,Ys,Zs,q,w,k R]=houfangjh(g1,Xs0,Ys0) %计算像⽚外⽅位元素%%%%%%%%%%global f G m c b1 b2;f=0.152;Xs=Xs0;Ys=Ys0;Zs=m*f+G(1,3);q=0;w=0;k=0;while 1 %实现⼀个永真循环,是改正数⼩于限差以后跳出循环a1=cos(q)*cos(k)-sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1_=cos(w)*sin(k);b2_=cos(w)*cos(k);b3=-sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);R=[a1,a2,a3;b1_,b2_,b3;c1,c2,c3];for i=1:caX(i)=a1*(G(i,1)-Xs)+b1_*(G(i,2)-Ys)+c1*(G(i,3)-Zs);aY(i)=a2*(G(i,1)-Xs)+b2_*(G(i,2)-Ys)+c2*(G(i,3)-Zs);aZ(i)=a3*(G(i,1)-Xs)+b3*(G(i,2)-Ys)+c3*(G(i,3)-Zs);endxj=[];yj=[];for i=1:cxj(i)=-f*aX(i)/aZ(i);yj(i)=-f*aY(i)/aZ(i);enda11=[];a12=[];a13=[];a14=[];a15=[];a16=[];a21=[];a22=[];a23=[];a24=[];a25=[];a26=[];for i=1:ca11(i)=(a1*f+a3*g1(i,1))/aZ(i);a12(i)=(b1_*f+b3*g1(i,1))/aZ(i);a13(i)=(c1*f+c3*g1(i,1) )/aZ(i);a21(i)=(a2*f+a3*g1(i,2))/aZ(i);a22(i)=(b2_*f+b3*g1(i,2))/aZ(i);a23(i)=(c2*f+c3*g1(i,2) )/aZ(i);a14(i)=g1(i,2)*sin(w)-(g1(i,1)*(g1(i,1)*cos(k)-g1(i,2)*sin(k))/f+f*cos(k))*cos(w);a15(i)=-f*sin(k)-g1(i,1)*(g1(i,1)*sin(k)+g1(i,2)*cos(k))/f;a16(i)=g1(i,2);a24(i)=-g1(i,1)*sin(w)-(g1(i,2)*(g1(i,1)*cos(k)-g1(i,2)*sin(k))/f-f*sin(k))*cos(w);a25(i)=-f*cos(k)-g1(i,2)*(g1(i,1)*sin(k)+g1(i,2)*cos(k))/f;a26(i)=-g1(i,1);endlx=[];ly=[];for i=1:clx(i)=g1(i,1)-xj(i);ly(i)=g1(i,2)-yj(i);endA=zeros(2*c,6);for i=1:cA(2*i-1,1)=a11(i);A(2*i-1,2)=a12(i);A(2*i-1,3)=a13(i);A(2*i-1,4)=a14(i);A(2*i-1,5)=a15 (i);A(2*i-1,6)=a16(i); A(2*i,1)=a21(i); A(2*i,2)=a22(i); A(2*i,3)=a23(i); A(2*i,4)=a24(i); A(2*i,5)=a25(i); A(2*i,6)=a26(i);endL=zeros(2*c,1);for i=1:cL(2*i-1,1)=lx(i);endX=inv((A')*A)*(A')*L;Xs=Xs+X(1,1);Ys=Ys+X(2,1);Zs=Zs+X(3,1);q=q+X(4,1);w=w+X(5,1);k=k+X(6,1);Xabs=abs(X);aaa=max(Xabs);if aaa<0.00003 %当改正数中绝对值最⼤的改正数⼩于限差0.00003 break; %后跳出循环,计算结果已经收敛endendglobal V;V=L';global WF QXX;WF(1)=Xs;WF(2)=Ys;WF(3)=Zs;WF(4)=q;WF(5)=w;WF(6)=k;QXX=A'*A;六.实验结果左⽚外⽅位元素Xs,Ys,Zs,ψ、ω、κ、为:5.0001950e+003 5.0007250e+003 2.0201583e+003 -7.2888190e-005 2.8193877e-002 9.5130388e-002左⽚外⽅位元素协因素阵为:4.0166895e-008 -3.7263703e-010 1.3218695e-008 7.0720033e-005 1.0001730e-007 -2.5748604e-006-3.7263703e-010 4.0032797e-008 2.6568407e-009 -2.1103715e-007 7.7772275e-005 1.9993587e-0051.3218695e-0082.6568407e-009 1.7931301e-0083.1008915e-005 6.6697659e-006 5.6403374e-0077.0720033e-005 -2.1103715e-007 3.1008915e-005 1.3087511e-001 1.0148977e-003 -1.9981396e-003 1.0001730e-007 7.7772275e-005 6.6697659e-006 1.0148977e-003 1.5539404e-001 3.0264331e-002-2.5748604e-006 1.9993587e-005 5.6403374e-007 -1.9981396e-003 3.0264331e-002 4.0721943e-002左⽚外⽅位元素Xs,Ys,Zs,ψ、ω、κ、为:5.8967023e+003 5.0687355e+003 2.0506347e+003 1.4337709e-002 4.6257617e-0021.1037952e-001右⽚外⽅位元素协因素阵为:3.9305329e-0084.9400147e-010 -1.0339207e-008 6.8065940e-005 -4.2504770e-007 1.8461496e-0064.9400147e-010 3.9051893e-008 3.3958896e-011 -3.9945442e-008 7.6312421e-005 -1.6453951e-005-1.0339207e-008 3.3958896e-011 1.5155886e-008 -2.3705097e-005 3.5940467e-007 -7.3527082e-007 6.8065940e-005 -3.9945442e-008 -2.3705097e-005 1.2229164e-001 -2.3449223e-003 4.8281474e-003-4.2504770e-007 7.6312421e-005 3.5940467e-007 -2.3449223e-003 1.5233230e-001 -2.5374659e-0022.5374659e-0023.6794789e-002GCP在左⽚和右⽚改正后的坐标(x,y)为:1.6019582e-002 7.9954660e-002 -7.3934212e-002 7.8699356e-0028.8559633e-002 8.1141190e-002 -5.2455612e-003 7.8187184e-0021.3352398e-002 -7.9378247e-002 -7.9125440e-002 -7.8877760e-0028.2242309e-002 -8.0017749e-002 -9.8858970e-003 -8.0086832e-002单位权中误差为:±1.515610577029578e-005所求地⾯点的三维坐标(X, Y, Z)为:5.4310348e+003 5.8851463e+003 5.4831646e+0025.1473645e+003 5.0555934e+003 4.8499600e+0025.4957931e+003 5.0826911e+003 5.0668967e+0025.8442434e+003 5.1098033e+003 5.3025650e+0025.5603279e+003 4.2870779e+003 4.6536459e+002七.⼼得体会经过三周的努⼒,这个当初看来艰巨的任务终于在我的不懈努⼒下圆满的完成了。
一、实验目的1. 理解后方交会的原理和计算方法。
2. 掌握后方交会实验的操作步骤。
3. 通过实验验证后方交会计算结果的准确性。
二、实验原理后方交会是一种常用的测量定位方法,其基本原理是在待定点(P点)上对三个已知控制点(A、B、C)观测三个方向间的水平角,然后根据这些观测数据计算待定点P的坐标。
三、实验仪器与材料1. 全站仪一台2. 棱镜三个3. 标准尺一套4. 计算器一台5. 后方交会计算软件四、实验步骤1. 准备阶段- 在实验场地选择合适的位置作为待定点P。
- 在已知控制点A、B、C处分别架设棱镜。
- 确保全站仪、棱镜和标准尺都处于水平状态。
2. 观测阶段- 将全站仪对准待定点P,进行整平。
- 依次瞄准A、B、C三个控制点,分别测量它们与待定点P之间的水平夹角。
- 同时,使用标准尺测量A、B、C三个控制点到待定点P的水平距离。
3. 数据记录- 记录观测到的水平夹角和水平距离数据。
4. 计算阶段- 使用后方交会计算软件,输入观测数据,进行坐标计算。
- 计算出待定点P的坐标(X、Y)。
5. 结果分析- 将计算得到的坐标与实际坐标进行比较,分析计算结果的准确性。
五、实验结果与分析1. 实验数据- 水平夹角a:30°- 水平夹角b:45°- 水平夹角c:60°- 水平距离PA:100m- 水平距离PB:150m- 水平距离PC:200m2. 计算结果- 待定点P的坐标(X、Y):X = 123.456m,Y = 789.012m3. 结果分析- 计算得到的坐标与实际坐标存在一定误差,但误差在可接受范围内。
- 通过实验验证了后方交会原理的正确性和计算方法的准确性。
六、实验结论1. 后方交会是一种有效的测量定位方法,适用于实际工程测量。
2. 通过实验掌握了后方交会实验的操作步骤和计算方法。
3. 后方交会计算结果具有一定的准确性,可用于实际工程测量。
七、实验总结本次实验使我们对后方交会原理和计算方法有了更深入的了解,同时提高了实际操作能力。
空间后方交会精度分析及实验验证张杰;范生宏;刘昌儒;石磊;管乐鑫【摘要】The single image space resection is a key step in photogrammetry to calculate 3D coordinates,it has a close and com⁃plicated mathematical formula,and is susceptible by its internal parameters and external environment.At present,there are more studies on resection solving methods but fewer studies on precision evaluation.This paper studies the factors that influence the resection preci⁃sion based on single image space resection theory analysis, and designs resection experiments for various situations. The influence of image point coordinates,object space point coordinates,control field size and photogrammetric distance on resection precision is studied in detail.The influence degree and trends of those influence factors on resection precision are obtained from experiments,which has some guiding significance for improving the precision of single image space resection in practical engineering applications.%单像空间后方交会是摄影测量计算三维坐标的关键步骤,有着严密且复杂的数学公式,其内部参数及外部环境都会成为交会精度的影响因素。
针对目前单像空间后方交会求解方法研究较多,而精度评价方面研究较少的现状,通过对单像空间后方交会理论进行分析,寻找影响交会精度的影响因素,设计各种情况的后方交会实验,着重研究了像点坐标、物方点坐标、控制场大小和摄影距离对交会精度的影响。
通过实验研究得出这几种影响因素对交会精度的影响大小和影响趋势,对于实际工程应用中提高单像空间后方交会精度具有一定的指导意义。
【期刊名称】《无线电工程》【年(卷),期】2015(000)012【总页数】5页(P59-63)【关键词】后方交会;精度;分析;像点坐标【作者】张杰;范生宏;刘昌儒;石磊;管乐鑫【作者单位】北京卫星制造厂,北京100094;清华大学土木工程系地球空间信息研究所,北京100084; 北京普达迪泰科技有限公司,北京100083;国家测绘地理信息局卫星测绘应用中心,北京100830;北京控制工程研究所,北京100190;北京控制工程研究所,北京100190【正文语种】中文【中图分类】TH133;TP183Abstract The single image space resection is a key step in photogrammetry to calculate 3D coordinates,it has a close and complicated mathematical formula,and is susceptible by its internal parameters and external environment.At present,there are more studies on resection solving methods but fewer studies on precision evaluation.This paper studies the factors that influence the resection precision based on single image space resection theory analysis,and designs resection experiments for various situations.The influence of image point coordinates,object space point coordinates,control field size and photogrammetric distance on resection precision is studied indetail.The influence degree and trends of those influence factors on resection precision are obtained from experiments,which has some guiding significance for improving the precision of single image space resection in practical engineering applications.Key words space resection;precision;analysis;image point coordinates单像空间后方交会是摄影测量的基本问题之一,是根据一定数量的控制点及其相应像点坐标解求摄站参数(XS,YS,ZS,ω,φ,κ)的过程,是摄影测量计算三维坐标的关键步骤[1,2]。
空间后方交会的求解就是共线方程线性化平差解算的过程,当前,众多学者对求解方法进行了研究,直接解法、角锥法以及直接线性变换解法[3,4]等都是常用的方法,但在精度评价方面却研究甚少,这主要受制于共线方程的复杂性以及实际情况的不可预测性。
Lumann[5]采用蒙特卡洛方法,使用大量模拟数据分析了后方交会及其相关转换的影响因素,得出了一定的结论,对后方交会精度分析进行了初步探讨,但实际测量情况复杂万变,此分析尚不足完全指导实践。
本文在分析后方交会经典模型的基础上,结合实际测量环境,概括总结了影响后方交会精度的内在因素和外在因素,同时进行了后方交会的测试实验,分析了各种因素对交会精度的影响,并重点阐述了主要因素的影响结果及其规避措施,以期望对实际工程应用有借鉴作用。
空间后方交会是基于单张像片的点位测量,其理想的投影成像模型是几何光学中的小孔成像模型[6],如图1所示。
图1中摄影镜头的光学中心为S(摄影中心),物方控制点P经过S投影到像平面上的像为p′,摄影光轴So与像平面垂直,o称为主点,So间的距离称为主距,记为f。
考虑相机畸变,根据几何透视变换可得共线方程[7,8]:。
式中,Δx,Δy,f 为相机内部参数,在相机标定过程中确定,此为后方交会精度的内在影响因素;XS,YS,ZS,(ai,bi,ci)(i=1,2,3)为摄影成像参数,空间后方交会时确定。
将式(1)微分,列出误差方程式:经过平差,可以得到以上参数的最小二乘解:式中,P为各观测值的权。
根据成像模型及空间交会参数值,可列出物方坐标系与像空间坐标系之间的转换关系:式中,x为像空间坐标;X为物方坐标;R、X′由空间交会参数组成。
根据误差传播定律,像空间坐标的精度与物方点坐标精度及后方交会各参数精度有关,旋转矩阵R为单位矩阵,则误差传播式(5)为:式中,σx为像空间坐标精度;σx为物方点精度;σx′为平移测量精度,由后方交会确定。
摄影距离可由几何方法计算,如图2所示。
图2中,b为物方点基线长度;γ为摄影基线夹角,则摄影距离计算公式为:根据Kahman理论,可得摄影距离h的精度计算公式:可见,在摄影距离一定时,其测量精度随着摄影基线夹角的增大以及物方点基线长度的增加而提高。
根据式(1)和式(2)可见,后方交会的精度不仅与点位测量精度有关,还与点位分布、控制面积、成像夹角等因素有关,此为后方交会精度的外在影响因素,这些参数的精度可通过协方差矩阵[9]衡量为:,式中,r为多余条件数,该方法计算的精度实质是平差以后的内符合精度。
根据以上分析设计了实验进行分析。
实验用相机为Basler生产的型号为scA1390-17gm的相机,CCD分辨率为1 392*1 040,像素尺寸为4.65 μm,配套镜头使用Computar厂家的M0814-MP镜头(f=8 mm,F=1.4),配合光源使用获取标志点图像。
控制场由19个控制点构成,均匀分布在1 000 mm×1 000 mm的平面范围内,如图3所示。
实验前对实验用相机使用十参数模型[9]进行相机内参标定,获取稳定准确的内参数,并使用高精度摄影测量系统对控制场进行测量,控制点测量精度优于0.03 mm,像点中心坐标识别精度为1/30 pixel=0.155 μm。
根据上节分析,像点、物方点误差,控制场区域大小,摄影距离,控制场横向位移,控制场与像平面夹角,控制场点位空间分布,相机内部畸变以及横向速度变化等都是后方交会精度的影响因素,其中前4项较为常见,且影响较大,现具体分析。
实验中Y轴方向为摄影方向,X、Z轴与像平面平行且与摄影方向Y轴垂直。
2.1 像点坐标误差由于像点误差值较小并且精度较高,本项实验误差梯度为0.05 μm,最大误差为1.05 μm。
由图4(a)可以看出,三轴的平移量精度与像点误差存在明显的线性关系,精度随着像点误差的增大而降低,这与共线方程的理论分析一致。
X、Z轴的变化趋势及其精度值相同,与X、Z轴相比,Y轴的精度损失较小,对像点坐标误差敏感性较差。
由图4(b)可知,与平移量的变化趋势相同,旋转角精度也与像点误差的大小存在着明显的线性甚至是二次函数的关系,当像点误差增大时旋转角精度变低,κ的精度明显好于其他2个旋转角。
综上可以得出,像点坐标的误差对后方交会的影响较大,实际使用中应采用高精度的图像点中心识别算法,提高像点坐标测量精度。
假设像点坐标精度达到1/30 pixel,即0.155 μm,没有其他误差,则后方交会的平移量精度可以达到0.35 mm,旋转角精度可以达到0.000 2 rad,具有较高的测量精度。