(完整版)电机选型参考
- 格式:doc
- 大小:832.01 KB
- 文档页数:8

常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。

一、输送带电机选型信息1、电机功率:P=kFv/ηkσ=1.2(启动系数)k f=1(温度系数)k H=1(高度系数)K w=1.35(工作制系数)k= kσk f k H k w 1.62F=(1+0.3)μmg=1.3×0.3×300×9.8=1146.6N(皮带张力)v=0.2m/s(输送速度)η1=0.9(减速机效率)η3=0.95(轴承效率)η4=0.9(带传动效率)η=η=η1η32η4 =0.9×0.95×0.95×0.9=0.731皮带输送电机功率应大于P=1.62×1146.6×0.2/0.731=508.2w 2、驱动扭矩计算:T=dμmg/(2πη)T=0.1×0.3×300×9.8/(2×3.14×0.8)=17.56Nm3、综合上述电机功率750w、减速机减速比40。
对应输出扭矩T=9550*750/1400=204.6Nm,满足要求。
对应直线速度v=1400/40/60*2*3.14*50=183mm/s二、输送带旋转电机选型信息1、机构旋转扭矩分析运用运动分析方式确定机构旋转扭矩,预定机构转动角度90°,时间4s,负载重量300kg。
运动测试所得如下图,所需达到的驱动扭矩为:1965Nm。
2、伺服电机转速分析伺服电机选用大惯量伺服电机,转速为1500r/min=25r/s,预定机构转动角度90°(0.25转),时间4s,结合链轮齿数比1:2,减速机减速比为2003、转动惯量分析如下图分析,旋转方向上的转动惯量约为195kgm2设传动比为200195/2002应小于电机转子转动惯量的5倍4、综上所述机构旋转扭矩1965Nm,电机输出扭矩按传动比折算后为10Nm,选减速比200的减速系统,电机5、惯量应大于975kgmm2。



步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
*反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1。
2°、但动态性能差、效率低、发热大,可靠性难保证。
*永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7。
5°或15°)。
*混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好.该种电机的基本步距角为1。
8°/步,配上半步驱动器后,步距角减少为0。
9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步).由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。
具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。
可满足不同行业、不同环境下的使用需求。
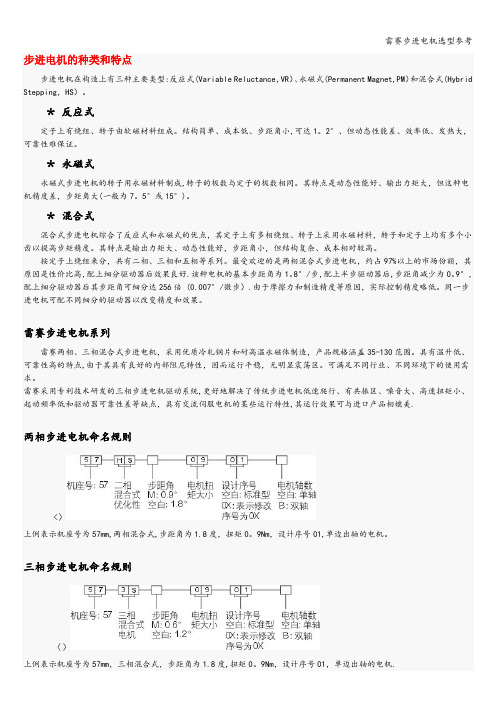
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美.两相步进电机命名规则<〉上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0。



电机选型计算书PZY 电机(按特大型车设计即重量为2500吨)一、提升电机 根据设计统计提升框架重量为:2200kg,则总提升重量为G=2500+2200=4700kg.设计提升速度为5-5.5米/分钟,减速机效率为0.95。
则提升电机所需要的最小理论功率: P=386.444495.0605.58.94700=⨯⨯⨯ 瓦. 设计钢丝绳绕法示意图:如图所示F=1/2*G ,V2=2*V1 即力减半,速度增加一倍,所以F=2350 kg 。
根据设计要求选择电机功率应P >4444.386瓦,因为所有车库专用电机厂家现有功率P >4444。
386瓦电机最小型号5。
5KW ,所以就暂定电机功率P=5。
5KW ,i=60.钢丝绳卷筒直径已确定为260mm ,若使设备提升速度到5。
5m/min 即0。
09167m/s ;由公式:D πων=可求知卷筒转速:r D 474.1326.014.311=⨯==πνω 查电机厂家资料知:电机功率:P=5.5KW 速比: i=60电机输出轴转速为ω=25r ,扭矩为M=199。
21/kg ·m ,输出轴径d=φ60mm 。
则选择主动链轮为16A 双排 z=17,机械传动比为:25474.13i 1'==z z 54.31474.131725z 1=⨯= 取从动轮16A 双排z=33;1).速度校核:所选电机出力轴转速为ω=25r ,机械减速比为33/17,得提升卷筒转速:r 88.123317251=⨯=ω 综上可知:提升钢索自由端线速度:min)/(52.1026.088.1214.3m D =⨯⨯==πων则提升设备速度为:v=10。
52/2=5。
26m/min.2).转矩校核:设备作用到钢索卷筒上的力为:G/2=2350kg 。
则,卷筒所需最小转矩:T=2350*0。
13=305。
5 kg ·m链条传动效率取η=0.96,动载系数取K=1.2,电机出力轴最小转矩为;m kg T ·72.19696.0332.1175.3051=⨯⨯⨯= 可见:1T 〈199。
名词解释1. 最大允许转矩:在本产品系列中主要是对减速箱而言,减速箱的输出轴转矩随减速比的变化而变化,受材料、结构等多方面因素制约。
减速箱最大允许转矩指在保证强度、使用寿命等正常工况下可能承受(或输出)的最大转矩。
2. 传动效率:减速箱动力传递的效能。
3. 径向负载:电机或减速箱输出轴在半径方向上的承受载荷。
4. 轴向负载:电机或减速箱输出轴在轴向上的承受载荷。
5. 额定:在保持正常温度下,电机能够安全运行的限度称为额定。
例如:额定输出、额定电压、额定频率、额定转速。
额定时间:额定输出下可正常连续运转的时间称为额定时间。
连续额定:在额定输出下,可连续使用时称为连续额定。
短时间额定:在指定的固定时间做额定输出运转时称为短时间额定。
6. 输出:单位时间对外所做的功。
额定输出:电机在额定电压、额定频率下,连续稳定的输出额定转速、额定转矩。
7. 转矩:起动转矩:电机起动时瞬间产生的转矩。
最大转矩:电机在一定电压、一定频率下可能输出的最大转矩。
额定转矩:电机在额定电压、额定频率下可连续输出的转矩。
静摩擦转矩:电磁制动、离合器制动等在停止状况下,为保持该状态时电机的输出转矩。
容许转矩:指电机运转时所能使用的最大转矩。
该转矩受电机的额定转矩、温升以及组合的减速箱强度所限制。
8. 转速:同步转速:电机的固定特性参数与电机的极数、使用电源的频率有关。
Ns=120f/P(r/min)Ns :同步转速(r/min)f :电源频率(Hz)p :电极极数空载转速:标准电机、可逆电机在无负载时的转速(比同步转速低1~5%)。
额定转速:电机在额定工况下的转速(比同步转速低5~20%)。
转差率:转速的表示方式之一。
S=(Ns-N)/N (r/min)S :转差率Ns :同步转速(r/min)N :任意负载时的转速(r/min)9. 停止过转量:电机输出轴从切断电源的瞬间到完全停止时,因惯性继续旋转的圈数(或角度)。
10.制动力:为使电机输出轴快速减速、制动停止,或使电机输出轴保持状态所施加于电机(转子)的力。

三相电机选型及计算案例一、三相电机的选型三相电机主要包括感应电机、同步电机和直流电机。
选型时需要考虑功率、转速、电源电压、负载特性等因素。
1.功率:根据负载要求确定所需的功率大小,一般选择稍大于负载需求的功率。
2.转速:根据负载所需转速和机械传动关系,选择合适的转速。
3.电源电压:根据所需供电电压确定电机额定电压。
4.负载特性:根据负载对电机的启动、加速、制动等特性要求,选择适合的电机类型。
二、三相电机计算案例假设工厂需要驱动一个功率为10kW的负载设备,该设备需要运行在1500转/分的转速下。
根据负载要求和电源条件,我们可以通过以下步骤进行选型和计算。
步骤1:计算负载的功率因数(PF)根据负载设备的特性,假设功率因数为0.8步骤2:计算所需额定电流(I)根据功率和功率因数的关系,可得额定电流公式:I=P/(√3×V×PF)其中,P为负载功率,V为电源电压,PF为功率因数。
代入数值:P=10kW,V=380V,PF=0.8,计算得:I=10,000/(1.732×380×0.8)≈17.9A步骤3:选择合适的电机类型和框架大小根据所需功率和转速,结合电源电压和负载特性,选择适合的电机类型和框架大小。
以常用的感应电机为例,根据经验,选择一个稍大的规格,如15kW。
步骤4:根据电机性能曲线进行进一步确认通过查找选定电机的性能曲线,确认额定功率、转速等是否满足需求。
综上所述,我们可以选择一个额定功率为15kW的三相感应电机来驱动该负载设备。
在实际应用中,还需要考虑电机的启动、制动、过载和效率等特性,以及其他特殊环境要求,如防爆、防护等。
选型时需要综合考虑,并结合实际情况进行确定。
以上是三相电机选型及计算案例的简要介绍,希望能对您有所帮助。
如果还有其他问题,请随时提问。

电机选型-总结版电机选型需要计算工作扭矩、启动扭矩、负载转动惯量,其中工作扭矩和启动扭矩最为重要。
1工作扭矩T b 计算:首先核算负载重量W ,对于一般线形导轨摩擦系数μ=0.01,计算得到工作力F b 。
水平行走:F b =μW 垂直升降:F b =W 1.1齿轮齿条机构一般齿轮齿条机构整体构造为电机+减速机+齿轮齿条,电机工作扭矩T b 的计算公式为:T b =F b ∙D2其中D 为齿轮直径。
1.2丝杠螺母机构一般丝杠螺母机构整体构造为电机+丝杠螺母,电机工作扭矩T b的计算公式为:T b =F b ∙BP 2πη其中BP 为丝杠导程;η为丝杠机械效率(一般取0.9~0.95,参考下式计算)。
η=1−μ′∙tanα1+μ′tanα其中α为丝杠导程角;μ’为丝杠摩擦系数(一般取0.003~0.01,参考下式计算)。
μ=tanβ其中β丝杠摩擦角(一般取0.17°~0.57°)。
2启动扭矩T计算:启动扭矩T为惯性扭矩T a和工作扭矩T b之和。
其中工作扭矩T b 通过上一部分求得,惯性扭矩T a由惯性力F a大小决定:F a=W∙a其中a为启动加速度(一般取0.1g~g,依设备要求而定,参考下式计算)。
a=v t其中v为负载工作速度;t为启动加速时间。
T a计算方法与T b计算方法相同。
3 负载转动惯量J计算:系统转动惯量J总等于电机转动惯量J M、齿轮转动惯量J G、丝杠转动惯量J S和负载转动惯量J之和。
其中电机转动惯量J M、齿轮转动惯量J G和丝杠转动惯量J S数值较小,可根据具体情况忽略不计,如需计算请参考HIWIN丝杠选型样本。
下面详述负载转动惯量J的计算过程。
将负载重量换算到电机输出轴上转动惯量,常见传动机构与公式如下:J=W×(BP2×103)2×(1GL)2J:电机输出轴转动惯量(kg·m2)W:可动部分总重量(kg)BP:丝杠螺距(mm)GL:减速比(≥1,无单位)J=W×(D2×103)2×(1GL)2J:电机输出轴转动惯量(kg·m2)W:可动部分总重量(kg)D:小齿轮直径(mm)链轮直径(mm)GL:减速比(≥1,无单位)J=(J1+W×(L103)2)×(1GL)2J:电机输出轴转动惯量(kg·m2)J1:转盘的转动惯量(kg·m2)W:转盘上物体的重量(kg)L:物体与旋转轴的距离(mm)GL:减速比(≥1,无单位)4 电机选型总结电机选型中需引入安全系数,一般应用场合选取安全系数S=2。

电机选型手册目录模板1. 引言1.1 背景信息1.2 目的和意义2. 电机选型的基本原理2.1 电机选型的重要性2.2 电机选型的基本步骤2.3 电机选型的考虑因素3. 类型一:直流电机选型3.1 直流电机的工作原理3.2 直流电机选型的注意事项3.3 直流电机选型的常见问题与解决方法4. 类型二:交流电机选型4.1 交流电机的工作原理4.2 交流电机选型的注意事项4.3 交流电机选型的常见问题与解决方法5. 类型三:步进电机选型5.1 步进电机的工作原理5.2 步进电机选型的注意事项5.3 步进电机选型的常见问题与解决方法6. 类型四:无刷直流电机选型6.1 无刷直流电机的工作原理6.2 无刷直流电机选型的注意事项6.3 无刷直流电机选型的常见问题与解决方法7. 选型实例分析7.1 实例一:低功率家用电器电机的选型案例 7.2 实例二:工业设备驱动电机的选型案例7.3 实例三:汽车电动化系统电机的选型案例8. 电机选型软件与工具推荐8.1 电机选型软件的功能和使用方法8.2 电机选型工具的常见类型与特点8.3 最佳实践和建议9. 总结9.1 电机选型的关键要点回顾9.2 展望未来发展方向10. 参考文献注:以上为电机选型手册的目录模板,可根据具体需求进行修改和拓展。
每个章节可以逐一展开讨论电机选型的相关主题,包括原理、注意事项、常见问题与解决方法以及实例分析等内容。
字数限制已超过1500字,可以根据需要进一步调整。
整个手册的内容需要整洁美观,语句通顺,确保读者无障碍地阅读和理解。
同时,推荐在文末提供参考文献,方便读者进一步深入学习和了解相关电机选型知识。

电机选型-总结版电机选型需要计算工作扭矩、启动扭矩、负载转动惯量,其中工作扭矩和启动扭矩最为重要。
1工作扭矩T b 计算:首先核算负载重量W ,对于一般线形导轨摩擦系数μ=0.01,计算得到工作力F b 。
水平行走:F b =μW 垂直升降:F b =W 1.1齿轮齿条机构一般齿轮齿条机构整体构造为电机+减速机+齿轮齿条,电机工作扭矩T b 的计算公式为:T b =F b ∙D2其中D 为齿轮直径。
1.2丝杠螺母机构一般丝杠螺母机构整体构造为电机+丝杠螺母,电机工作扭矩T b的计算公式为:T b =F b ∙BP 2πη其中BP 为丝杠导程;η为丝杠机械效率(一般取0.9~0.95,参考下式计算)。
η=1−μ′∙tanα1+μ′tanα其中α为丝杠导程角;μ’为丝杠摩擦系数(一般取0.003~0.01,参考下式计算)。
μ=tanβ其中β丝杠摩擦角(一般取0.17°~0.57°)。
2启动扭矩T计算:启动扭矩T为惯性扭矩T a和工作扭矩T b之和。
其中工作扭矩T b 通过上一部分求得,惯性扭矩T a由惯性力F a大小决定:F a=W∙a其中a为启动加速度(一般取0.1g~g,依设备要求而定,参考下式计算)。
a=v t其中v为负载工作速度;t为启动加速时间。
T a计算方法与T b计算方法相同。
3 负载转动惯量J计算:系统转动惯量J总等于电机转动惯量J M、齿轮转动惯量J G、丝杠转动惯量J S和负载转动惯量J之和。
其中电机转动惯量J M、齿轮转动惯量J G和丝杠转动惯量J S数值较小,可根据具体情况忽略不计,如需计算请参考HIWIN丝杠选型样本。
下面详述负载转动惯量J的计算过程。
将负载重量换算到电机输出轴上转动惯量,常见传动机构与公式如下:J=W×(BP2×103)2×(1GL)2J:电机输出轴转动惯量(kg·m2)W:可动部分总重量(kg)BP:丝杠螺距(mm)GL:减速比(≥1,无单位)J=W×(D2×103)2×(1GL)2J:电机输出轴转动惯量(kg·m2)W:可动部分总重量(kg)D:小齿轮直径(mm)链轮直径(mm)GL:减速比(≥1,无单位)J=(J1+W×(L103)2)×(1GL)2J:电机输出轴转动惯量(kg·m2)J1:转盘的转动惯量(kg·m2)W:转盘上物体的重量(kg)L:物体与旋转轴的距离(mm)GL:减速比(≥1,无单位)4 电机选型总结电机选型中需引入安全系数,一般应用场合选取安全系数S=2。


5.电机选型5.1动机类型和结构形式的选择电动机主要有Y 、YZ 、YZR 系列,无特殊需要,一般选取Y 系列的三相交流异步电动机;而YZ 、YZR 系列一般用于频繁启动,制动和换向,具有较小的转动惯量和较大的过载能力。
我们设计的自动图书贴标签机没有特殊要求,故选用Y 系列的三相交流异步电动机。
5.2电动机功率的确定本机械消耗功率由以下几个部分组成:1.夹书皮带轮传送机构皮带上共有5个夹子在线运动,可以同时有3个夹子夹书工作。
书本以汉语词典为最重案例,重600g 。
三个夹子夹着3本汉语词典以速度V=0.4m/s 运动为最大功率s m kg N kg V F P /4.03/106.01⨯⨯⨯=⨯==7.2w圆整为10w.2.小车传送机构小车本身重2kg,共有10个书位,在放满书的情况下重8kg已知小车运动速度为0.08m/s.故最大功率为:s m kg N kg V F P /08.0/1082⨯⨯=⨯==6.4w圆整为10w3.凸轮剪切标签机构根据查阅资料得,因贴纸较难剪切,故需大约100N 的力。
取剪切的功率为200W 。
4.曲柄摇杆贴标签冲压运动通过查阅资料,我们对本机械定义为小型机器,故取冲压功率为200W5.齿轮传动消耗功率机械系统中用了3组齿轮啮合,两组滚子链,两组槽轮,一组皮带轮传动,故会产生较大的摩擦分享功率,为了保险起见应当在前者计算基础上多增加200w 功率。
故最终54321P P P P PP ++++==620w 取总体0.8η≈,故ηP =额定P =775w5.3电动机转速的确定根据尺寸计算已知W6=10rad/s ,n6=95r/min W5=W6,W4=W3且4,5的传动比为4,故W4=2.5rad/s=W3 3为主动轮,求得n3=23.9r/min 圆整为24r/min5.4电动机型号的确定额定功率为775W,转速24r/min 。
名词解释
1. 最大允许转矩:
在本产品系列中主要是对减速箱而言,减速箱的输出轴转矩随减速比的变化而变化,受材料、结构等多方面因素制约。
减速箱最大允许转矩指在保证强度、使用寿命等正常工况下可能承受(或输出)的最大转矩。
2. 传动效率:
减速箱动力传递的效能。
3. 径向负载:
电机或减速箱输出轴在半径方向上的承受载荷。
4. 轴向负载:
电机或减速箱输出轴在轴向上的承受载荷。
5. 额定:
在保持正常温度下,电机能够安全运行的限度称为额定。
例如:额定输出、额定电压、额定频率、额定转速。
额定时间:额定输出下可正常连续运转的时间称为额定时间。
连续额定:在额定输出下,可连续使用时称为连续额定。
短时间额定:在指定的固定时间做额定输出运转时称为短时间额定。
6. 输出:
单位时间对外所做的功。
额定输出:电机在额定电压、额定频率下,连续稳定的输出额定转速、额定转矩。
7. 转矩:
起动转矩:电机起动时瞬间产生的转矩。
最大转矩:电机在一定电压、一定频率下可能输出的最大转矩。
额定转矩:电机在额定电压、额定频率下可连续输出的转矩。
静摩擦转矩:电磁制动、离合器制动等在停止状况下,为保持该状态时电机的输出转矩。
容许转矩:指电机运转时所能使用的最大转矩。
该转矩受电机的额定转
矩、温升以及组合的减速箱强度所限制。
8. 转速:
同步转速:电机的固定特性参数与电机的极数、使用电源的频率有关。
Ns=120f/P(r/min)
Ns :同步转速(r/min)
f :电源频率(Hz)
p :电极极数
空载转速:标准电机、可逆电机在无负载时的转速(比同步转速低1~5%)。
额定转速:电机在额定工况下的转速(比同步转速低5~20%)。
转差率:转速的表示方式之一。
S=(Ns-N)/N (r/min)
S :转差率
Ns :同步转速(r/min)
N :任意负载时的转速(r/min)
9. 停止过转量:
电机输出轴从切断电源的瞬间到完全停止时,因惯性继续旋转的圈数(或角度)。
10.制动力:
为使电机输出轴快速减速、制动停止,或使电机输出轴保持状态所施加于电机(转子)的力。
电磁制动电机的制动力等于额定转矩。
可逆电机的制动力等于10%的额定转矩。
选用计算
在电机、减速箱的选型中,首先要确认负载的工况。
在此基础上对负载进行计算,从而确定所需配套的电机、减速箱型号,进而可以根据安装要求确定电机、减速箱的安装结构形式。
1. 皮带输送的负载计算
负载功率:
2. 缠绕升降:
负载功率:
3.水平牵引:
负载功率:
4. 回转体驱动:
负载功率:
类型GD2(回转惯量计算)盘状
管状
球体
立方体
圆柱
绕一端旋转
绕平行轴旋转
水平
运动
垂直运
动
齿轮减
速
选型举例:
①皮带轮机构
AC电机时:
此为在输送带驱动机构上使用标准电机时的选定例。
须按下述要求规格来选用电机。
(要求规格及机构规格)
皮带与工作物的总重量•••••••m1=20kg
滑动面的摩擦系数•••••••••••μ=0.3
滚轮的直径••••••••••••D =100mm
滚轮的重量•••••••••••••m2=1kg
皮带•滚轮的效率••••••••••η = 0.9
皮带的速度••••••••V = 140mm/s±10%
电机电源•••••••••••单相110V60Hz
工作时间•••••••••••1天8小时运转
②决定减速箱的减速比:
减速比输出轴转速:
N G=(V•60)/(π•D)=((140±14)×60)/(π×100)=26.7±2.7[r/min]
因电机(4极)在60Hz时的额定转速为1450~1550r/min,所以应选择在此范围内的减速比i=60。
减速箱的减速比i为:
i=(1450~1550)/N G=(1450~1550)/(26.7±2.7)=49.3~64.6
计算必要转矩:
输送带起动时所需的转矩为最大。
先计算起动时的必要转矩。
滑动部的摩擦力F,
F=μm·g=0.3×20×9.807=58.8[N]
负载转矩T L=F·D/2·η+(58.8×100×10-3)/(2×0.9)=3.27[N·m]
此负载转矩为减速箱输出轴的数值,因此需换算成电机输出轴的数值。
电机输出轴的必要转矩T M
T M=T L/i·ηG=3.27/(60×0.66)=0.0826[N·m]=82.6[mN·m]
(减速箱的传导效率ηG=0.66)
按使用电源电压波动(220V±10%)等角度考虑,设定安全率为2倍。
82.6×2≈165[mN·m]
起动转矩为165mN·m以上的电机,可参阅标准电机型号/性能表来选择。
电机:90YS40GV22,再选用可与90YS40GV22组合的减速箱90GK60H。
④确认负载惯性惯量:
皮带·工作物的惯性惯量J m1=m1×(π×D/ 2π)2
=20×(π×100×10-3/2π)2
=500×10-4[kg·m2]
滚轮的惯性惯量J m2=1/8×m2×D2
=1/8×1×(100×10-3)2
=12.5×10-4[kg·m2]
减速箱输出轴的全负载惯性惯量
J=500×10-4+12.5×10-4×2=525×10-4[kg·m2]
此处90GK60H的容许负载惯性惯量请参阅前述数据。
J G=0.75×10-4×602=2700×10-4[kg·m2]
因J>J G,即负载惯性惯量为容许值以下,故可以使用。
且所选用的电机额定转矩为260mN·m,较实际负载转矩为大,因此电机能以比额定转速更快的转速运转。
再依据无负载时的转速(约1750r/min)来计算皮带的速度,确认所选制
品是否符合规格要求。
以上确认结果为均能满足规格要求。
V=(N M·π·D)/60·i=(1750×π×100)/(60×60)=152.7[mm/s] (电机转速N M)
综上所述,对负载工况的分析、负载计算,是选用电机、减速箱的基础。
有关详细的计算可参阅《机械设计手册》中相关章节。
通过负载计算,装配中应该注意的事项,总体是寄予用户合理、安全可靠的选择本系列产品。
这只是选型与安装的过程,有关控制回路的接线与整机的配套使用,请参阅相关部分。