电液伺服阀的使用
- 格式:ppt
- 大小:1.61 MB
- 文档页数:43
电液伺服阀使用及维护要求一、污染度要求①安装伺服阀的液压系统必须进行彻底清洗。
②伺服阀进油口前必须配置公称过滤精度不低于10的滤油器③使用射流管电液伺服阀的液压系统油液推荐清洁度等级为:⏹长寿命使用时应达到-/16/13级(NAS 7级)⏹一般使用最差不劣于-/19/15级(相当于NAS10级)。
二、安装要求①安装座表面粗糙度值应小于Ra1.6,表面不平度不大于0.025mm 。
②不允许用磁性材料制造安装座,周围不允许有明显的磁场干扰。
③安装工作环境应保持清洁 ,清洁时应使用无绒布或专用纸张 。
④进口油和回油口不要接错。
⑤检查底面各油口的密封圈是否齐全 。
⑥每个线圈的最大电流不要超过2倍额定电流⑦油箱应密封,并尽量选用不锈钢板材。
油箱上应装有加油及空气过滤用滤清器。
⑧禁止使用麻线、胶粘剂和密封带作为密封材料。
⑨伺服阀的冲洗板应在安装前拆下,并保存起来,以备将来维修时使用。
⑩对于长期工作的液压系统,应选较大容量的滤油器。
⑾动圈式伺服阀使用中要加颤振信号,有些还要求泄油直接回油箱,伺服阀还必须垂直安装。
⑿双喷挡伺服阀要求先通油后给电信号。
三、维修保护①定期检查工作液的污染度 。
②建立新油是“脏油”的概念 ,注入新油前应彻底清洗油箱 ,清洗24小时以上③不得擅自分解伺服阀④定期返回生产单位清洗、调整⑤油质保持相对较好的油源,可较长时间不换油⑥切忌让铁磁物质长期与马达壳体相接触⑦除非外部有机械调零装置,否则不要自己擅拆伺服阀去调零。
⑧最好接受厂方的指导更换伺服阀滤器⑨伺服阀装卸时千万要注意干净 ,这是最重要的保养要求。

电液伺服阀电液伺服阀既是电液转换元件,又是功率放大元件,它能够把微小的电气信号转换成大功率的液压能(流量和压力)输出。
它的性能的好坏对系统的影响专门大。
因此,它是电液控制系统的核心和关键。
为了能够正确设计和利用电液控制系统,必需掌握不同类型和性能的电液伺服阀。
伺服阀输入信号是由电气元件来完成的。
电气元件在传输、运算和参量的转换等方面既快速又简便,而且能够把各类物理量转换成为电量。
所以在自动控制系统中普遍利用电气装置作为电信号的比较、放大、反馈检测等元件;而液压元件具有体积小,结构紧凑、功率放大倍率高,线性度好,死区小,灵敏度高,动态性能好,响应速度快等长处,可作为电液转换功率放大的元件。
因此,在一控制系统中常以电气为“神经”,以机械为“骨架”,以液压控制为“肌肉”最大限度地发挥机电、液的优势。
由于电液伺服阀的种类很多,但各类伺服阀的工作原理又大体相似,其分析研究的方式也大体相同,故今以常常利用的力反馈两级电液伺服阀和位置反馈的双级滑阀式伺服阀为重点,讨论它的大体方程、传递函数、方块图及其特性分析。
其它伺服阀只介绍其工作原理,同时也介绍伺服阀的性能参数及其测试方式。
电液伺服阀的组成电液伺服阀在电液控制系统中的地位如图27所示。
电液伺服阀包括电力转换器、力位移转换器、前置级放大器和功率放大器等四部份。
3.1.1 电力转换器包括力矩马达(转动)或力马达(直线运动),可把电气信号转换为力信号。
3.1.2 力位移转换器包括钮簧、弹簧管或弹簧,可把力信号变成位移信号而输出。
3.1.3 前置级放大器包括滑阀放大器、喷嘴挡板放大器、射流管放大器。
3.1.4 功率放大器——滑阀放大器由功率放大器输出的液体流量则具有必然的压力,驱动执行元件进行工作。
图27 电液控制系统方块图电液伺服阀的分类电液伺服阀的分类电液伺服阀的种类很多,按照它的结构和性能可作如下分类:1)按液压放大级数,可分为单级伺服阀、两级伺服阀和三级伺服阀,其中两级伺服阀应用较广。

电液伺服阀和电液比例阀的概述摘要 介绍了电液伺服阀和电液比例阀的组成及功能特点,同时对两种阀进行了比较,得出两种阀的使用特点和使用场合。
关键词 电液伺服阀 电液比例阀 闭环控制 力矩马达 比例电磁铁 反馈装置1.前沿阀对流量的控制可以分为两种: 一种是开关控制:要么全开、要么全关,流量要么最大、要么最小,没有中间状态,如普通的电磁换向阀、电液换向阀。
另一种是连续控制:阀口可以根据需要打开任意一个开度,由此控制通过流量的大小,这类阀有手动控制的,如节流阀,也有电控的,如比例阀、伺服阀。
所以使用比例阀或伺服阀的目的就是:以电控方式实现对流量的节流、压力控制。
2.电液伺服阀电液伺服阀是一种自动控制阀,它既是电液转换组件,又是功率放大组件,其功用是将小功率的模拟量电信号输入转换为随电信号大小和极性变化、且快速响应的大功率液压能[能量(或)和压力]输出,从而实现对液压执行器位移(或转速)、速度(或角速度)、加速度(或角加速度)和力(或转矩)的控制。
电液伺服阀通常由电气-机械转换器、液压放大器(先导阀和功率级主阀)和检测机构组成。
电液伺服阀的基本组成有前置级液压放大器的伺服阀,无论是射流放大器还是喷嘴挡板放大器,其产生阀芯驱动力都要比比例电磁铁大得多(高一个数量级)。
就这个意义上讲,伺服阀阀芯卡滞的几率比比例阀小。
特别是射流管伺服阀的射流放大器因为没有压力负反馈,前置级流量增益与压力增益都较高,推动阀芯的力更大,所以伺服阀有更高的分辨率和较小的滞环。
简单地说,所谓伺服系统就是带有负反馈的控制系统,而伺服阀就是带有负反馈的控制阀。
伺服阀的主阀一般来说和换向阀一样是滑阀结构,只不过阀芯的换向不是靠电磁铁来推动,而是靠前置级阀输出的液压力来推动,这一点和电液换向阀比较相似,只不过电液换向阀的前置级阀是电磁换向阀,而伺服阀的前置级阀是动态特性比较好的喷嘴挡板阀或射流管阀。
伺服阀的主阀是靠前置级阀的输出压力来控制的,而前置级阀的压力则来自于伺服阀的入口p,假如p口的压力不足,前置级阀就不能输出足够的压力来推动主阀芯动作。

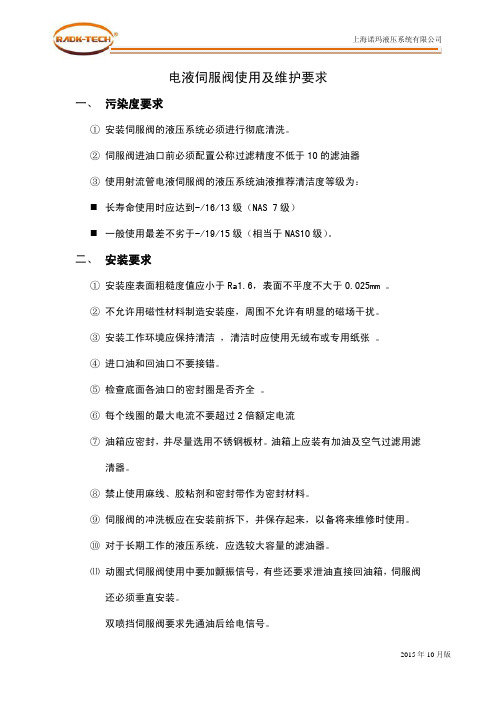
�(G)72K Series Installation ELECTROHYDRAULIC VALVE CUT-AWAYCoilArmature MagnetFlexure Tube Inlet OrificePolepiece ConnectorFilterFeedback WireSpoolFigure 1 Moog Series 72K and (G)72KSupply PressureBTankANozzle3. ELECTRICAL INFORMATION AND INTRINSICALLY SAFE CIRCUIT SAFETY PARAMETERSa. A wide choice of coils is available for a variety of rated currentrequirements. The torque motor coil leads are attached to the connector so external connections can provide series, parallel or single coiloperation. The valves are equipped either with an MS type connector or with pigtail leads for electrical wiring. Refer to installation drawings of the specific model for details. Servovalve coils should be driven with current to provide consistency throughout the temperature range.b. The (G)72K valves are approved for intrinsically safe protection per EN60079-11. The approved safety parameters are listed in the following table for all the coils used by (G)72K series. Coil number is marked on thevalve nameplate.Coil Configuration Marking U i (MAX) I i (MAX) G4220-031 (single, series, parallel) Ex ia IIB T4 12 V 120 mAG4220-051/098 (single, series, parallel) Ex ia IIB T4 12 V 240 mAG4221-001 G4220-042 (single) Ex ia IIC T4 16 V 160 mA G4221-001 G4220-042 (single) Ex ia IIC T4 24.4 V 85 mAG4220-031 (single, parallel) Ex ia IIC T4 30 V 26 mAG4220-031 (series) Ex ia IIC T4 30 V 18 mAG4220-051/098 (single, parallel) Ex ia IIC T4 30 V 19 mA G4220-051/098 (series) Ex ia IIC T4 30 V 12.7 mAG4220-042 (single) Ex ia IIC T4 30 V 37 mAG4220-042 (parallel) Ex ia IIC T4 30 V 20 mAG4220-042 (series) Ex ia IIC T4 30 V 10 mAG4221-001 (single) Ex ia IIC T4 30 V 28 mAc. The (G)72K valves are approved for non-incendive operation for supplycurrent not to exceed 50 mA dc.d. When making electric connections to the valve, appropriate measures mustbe taken to ensure that locally different earth potential do not result inexcessive ground currents. When barriers are required for the hazardous location, hazardous area (field) wiring must meet the requirements ofthe barrier manufacturer. All barriers must be mounted and installed incompliance with the barrier manufacturer’s requirements. Twisted pairs of 18-20 gage wire are recommended. If shielded wire is used, connect shield wire to earth ground only at the barrier strip.4. SPECIAL CONDITIONS FOR SAFE USEBecause the enclosure of the apparatus is made of aluminum, if it is mounted in an area where the use of category 1 G apparatus is required, it must be installed such that even in the event of rare incidents, ignition sources due to impact and friction sparks are excluded.When the electrohydraulic servovalve is used in an application for type of explosion protection intrinsic safety “i”, the appropriate box on the data label must be scored. When the electrohydraulic servovalve is used in an application for type of explosion protection “n”, the appropriate box on the data label must be scored.After use in an application for type of explosion protection “n”, the servovalve cannot abe safely used in a intrinsically safe application.The screwed cable connector may only be disconnected when the circuit is de-energized or when the location is known to be non-hazardous.When used at an ambient temperature ≥70°C, heat resistant cable must be used with a continuous operating temperature in accordance with the application.5. HYDRAULIC SYSTEM PREPARATIONTo prolong servovalve operational life and to reduce hydraulic system maintenance, it is recommended that the hydraulic fluid be kept at a cleanliness level of ISO DIS 4406 Code 16/13 maximum, 14/11 recommended. The most effective filtration scheme incorporates the use of a kidney loop or “off-line” filtration as one of the major filtration components. The filter for the “off-line” filtration scheme should be a ß3≥75 filter for maximum effectiveness.Upon system startup and prior to mounting the servovalve, the entire hydraulic system should be purged of built-in contaminating particles by an adequate flushing. The servovalve should be replaced by a flushing manifold and the hydraulic circuit powered up under conditions of fluid temperature and fluid velocity reasonably simulating normal operating conditions. New system filters are installed during the flushing process whenever the pressure drop across the filter element becomes excessive. The flushing processes should turn over the fluid in the reservoir between fifty to one hundred times.To maintain a clean hydraulic system, the filters must be replaced ona periodic basis. It is best to monitor the pressure drop across the filter assembly and replace the filter element when the pressure drop becomes excessive. In addition to other filters that are installed in the hydraulic circuit, it is recommended that a large capacity, low pressure ß3≥75 filter be installedin the return line. This filter will increase the interval between filter element replacements and greatly reduce the system contamination level.6. INSTALLATIONThe Moog (G)72K series industrial servovalve may be mounted in any position, provided the servovalve pressure, control, and tank ports match respective manifold ports. The mounting pattern and port location of the servovalve is shown on Figure 4. The servovalve should be mounted with 3/8-16 x 2.00 inch long, socket head cap screws. Apply a light film of oil to the screw threads and torque to 175 inch-pounds. Wire mating connector for desired coil configuration and polarity. Thread connector to valve.7. MECHANICAL NULL ADJUSTMENTIt is often desirable to adjust the flow null of a servovalve independent of other system parameters. The “mechanical null adjustment” on the Moog (G)72K Series servovalve allows at least ±20% adjustment of flow null. The “mechanical null adjustor” is an eccentric bushing retainer pin, located above the tank port designation on the valve body (see Figure 2) which, when rotated, provides control of the bushing position. Mechanical feedback elements position the spool relative to the valve body for a given input signal. Therefore, a movement of the bushing relative to the body changes the flow null. Mechanical Adjustment ProcedureUsing a 3/8 inch offset box wrench, loosen the self-locking fitting until thenull adjustor pin can be rotated. (This should usually be less than 1/2 turn). DO NOT remove self-locking fitting. Insert a 3/32 inch Allen wrench in null adjustor pin. Use the 3/32 Allen wrench to rotate the mechanical null adjustor pin to obtain desired flow null. Torque self-locking fitting to 57 inch lbs. Note:Clockwise rotation of null adjustor pin produces flow from port P to port B.Tools and Equipmenta. Blade screwdriverb. Allen wrench set (3/32, 7/64, 3/8, 3/16)c. No. 2-56 NC by 11/2 inch screwd. Torque wrenchese.3/8 inch offset box wrenchf. TweezersFigure 2Mechanical NullAdjustment10. FIELD REPLACEABLE FILTER ASSEMBLY REPLACEMENTa.Remove four socket head cap screws and lockwashers on filter cover using a 3/16 inch Allen wrench. Remove filter cover plate. Use to pull filter plug out.b. Remove o-rings and old filter from filter plug.c. Inspect filter for foreign material and discard.d. Install o-rings on filter plug and inside new filter.e.Install filter, filter plug and cover plate. Torque screws to 85 inch-pounds.11. FUNCTIONAL CHECKOUT AND CENTERINGa. Install servovalve on hydraulic system or test fixture, but do not connect electrical lead.b. Apply required system pressure to servovalve and visually examine for evidence of external leakage. If leakage is present and cannot be rectified by replacing o-rings, remove the discrepant component and return for repair or replacement.Note: If the system components are drifting or hardover, adjust the mechanical null of the servovalve.c. Connect electrical lead to servovalve and check phasing in accordancewith system requirements.Figure 3Filter Tube Inlet Orifice AssemblyFilter PlugFieldReplaceable FilterFilter HousingO-Rings8. GENERAL SERVICING RECOMMENDATIONSa. Disconnect electrical lead to servovalve.b. Relieve hydraulic system of residual pressure.(G)72K SERIES INSTALLATION AND OPERATION INSTRUCTIONCDS6754 RevD 500-448 0718Moog Inc., East Aurora, NY 14052-0018 Telephone: 716/652-2000Fax: 716/687-7910Toll Free: 1-800-272-MOOG TYPICAL WIRING SCHEMATICThe products described herein are subject to change at any time without notice, including, but not limited to, product features, specifications, and designs.3。

动圈式电液伺服阀工作原理嘿,咱今天就来好好唠唠动圈式电液伺服阀的工作原理!你说这动圈式电液伺服阀啊,就像是一个特别厉害的指挥官!它能精准地控制液压油的流向和流量,就好像是一个超级交通警察,指挥着来来往往的车流。
它里面有个动圈,就跟个活力满满的小马达似的。
这个动圈可是很关键的部分哦!当电流通过的时候,它就开始活跃起来啦。
然后呢,还有阀芯,就像是一扇门,通过动圈的带动,能巧妙地开关,让液压油乖乖地按照要求流动。
这就好比你家的水龙头,你拧开它,水就流出来了,拧得大小不同,水流量也就不一样。
想象一下,在各种机械设备里,动圈式电液伺服阀就像一个默默工作的小英雄。
它要保证机器能正常运转,动作精准无误。
要是它稍微出点差错,那可不得了啊,机器可能就会闹脾气,不好好工作啦!比如说在一些大型工业设备里,它得时刻保持警惕,不能有一丝马虎。
它得快速响应各种指令,及时调整液压油的流向和流量,就像一个反应迅速的运动员,随时准备冲刺。
而且哦,动圈式电液伺服阀的工作可稳定啦!不管是遇到恶劣的工作环境,还是长时间的工作压力,它都能稳稳地坚守岗位。
这一点是不是特别让人佩服呢?你看啊,这么一个小小的东西,却有着大大的能量。
它能让那些庞大的机械设备乖乖听话,按照我们的要求来工作。
这难道不神奇吗?咱再想想,如果没有动圈式电液伺服阀,那很多工业生产不就乱套了吗?那些需要精确控制的机器可能就会变得笨手笨脚的,没法好好干活啦!所以说啊,动圈式电液伺服阀真的是太重要啦!它就像一个幕后英雄,默默地为我们的生产生活贡献着力量。
我们可得好好珍惜它,好好了解它的工作原理,让它更好地为我们服务呀!总之,动圈式电液伺服阀就是这么神奇,这么厉害,这么不可或缺!原创不易,请尊重原创,谢谢!。

电液伺服阀的原理分类和应用简介一.电液伺服阀的工作原理电液伺服阀由力矩马达和液压放大器组成。
力矩马达工作原理磁铁把导磁体磁化成N、S极,形成磁场。
衔铁和挡板固连由弹簧支撑位于导磁体的中间。
挡板下端球头嵌放在滑阀中间凹槽内;线圈无电流时,力矩马达无力矩输出,挡板处于两喷嘴中间;当输入电流通过线圈使衔铁3左端被磁化为N极,右端为S极,衔铁逆时针偏转。
弹簧管弯曲产生反力矩,使衔铁转过θ角。
电流越大θ角就越大,力矩马达把输入电信号转换为力矩信号输出。
前置放大级工作原理压力油经滤油器和节流孔流到滑阀左、右两端油腔和两喷嘴腔,由喷嘴喷出,经阀9中部流回油箱力矩马达无输出信号时,挡板不动,滑阀两端压力相等。
当力矩马达有信号输出时,挡板偏转,两喷嘴与挡板之间的间隙不等,致使滑阀两端压力不等,推动阀芯移动。
功率放大级工作原理当前置放大级有压差信号使滑阀阀芯移动时,主油路被接通。
滑阀位移后的开度正比于力矩马达的输入电流,即阀的输出流量和输入电流成正比;当输入电流反向时,输出流量也反向。
滑阀移动的同时,挡板下端的小球亦随同移动,使挡板弹簧片产生弹性反力,阻止滑阀继续移动;挡板变形又使它在两喷嘴间的位移量减小,实现了反馈。
当滑阀上的液压作用力和挡板弹性反力平衡时,滑阀便保持在这一开度上不再移动。
二.电液伺服阀的分类1 按液压放大级数可分为单级电液伺服阀,两级电液伺服阀,三级电液伺服阀。
2 按液压前置级的结构形式,可分为单喷嘴挡板式,双喷嘴挡板式,滑阀式,射流管式和偏转板射流式。
3 按反馈形式可分为位置反馈式,负载压力反馈式,负载流量反馈式,电反馈式等。
4 按电机械转换装置可分为动铁式和动圈式。
5 按输出量形式可分为流量伺服阀和压力控制伺服阀。
三.电液伺服阀的发展趋势1/新型结构的设计在20 世纪90 年代,国外研制直动型电液伺服阀获得了较大的成就.现形成系列产品的有Moog 公司的D633,D634 系列的直动阀,伊顿威格士(EatonVickers)公司的LFDC5V 型,德国Bosch 公司的NC10 型,日本三菱及KYB 株式会社合作开发的MK 型阀及Moog 公司与俄罗期沃斯霍得工厂合作研制的直动阀等.该类型的伺服阀去掉了一般伺服阀的前置级, 利用一个较大功率的力矩马达直接拖动阀芯, 并由一个高精度的阀芯位移传感器作为反馈.该阀的最大特点是无前置级,提高了伺服阀的抗污染能力.同时由于去掉了许多难加工零件,降低了加工成本,可广泛使用于工业伺服控制的场合.国内有些单位如中国运载火箭技术研究院第十八研究所, 北京机床研究所, 浙江工业大学等单位也研制出了相关产品的样机. 特别是北京航空航天大学研制出转阀式直动型电液伺服阀. 该伺服阀通过将普通伺服阀的滑阀滑动结构转变为滑阀的转动, 并在阀芯与阀套上相应开了几个与轴向有一定倾角的斜槽.阀芯阀套相互转动时,斜槽相互开通或相互封闭,从而控制输出压力或流量.由于在工作时阀芯阀套是相互转动的,降低了阀工作时的摩擦阻力,同时污染物不容易在转动的滑阀内堆积,提高了抗污染性能.此外,Park 公司开发了"音圈驱动(Voice Coil Drive)"技术(VCD),以及以此技术为基础开发的DFplus 控制阀.所谓音圈驱动技术, 顾名思义, 即是类似于扬声器的一种驱动装置, 其基本结构就是套在固定的圆柱形永久磁铁上的移动线圈,当信号电流输入线圈时,在电磁效应的作用下,线圈中产生与信号电流相对应的轴向作用力,并驱动与线圈直接相连的阀芯运动,驱动力很大.线圈上内置了位移反馈传感器,因此,采用VCD 驱动的DFplus 阀本质上是以闭环方式进行控制的,线性度相当好.此外,由于VCD 驱动器的运动零件只是移动线圈,惯量极小,相对运动的零件之间也没有任何支承,DFplus 阀的全部支承就是阀芯和阀体间的配合面,大大减小了摩擦这一非线性因素对控制品质的影响.综合上述的技术特点,配合内置的数字控制模块,使DFplus 阀的控制性能佳,尤其在频率响应方面更是优越,可达400Hz.从发展趋势来看,新型直动型电液伺服阀在某些行业有替代传统伺服阀特别是喷嘴挡板式伺服阀的趋向, 但它的最大问题在于体积大, 重量重, 只适用于对场地要求较低的工业伺服控制场合. 如能减轻其重量, 减小其体积,在航空,航天等军工行业亦具有极大的发展潜力.另外,近年来伺服阀新型的驱动方式除了力矩马达直接驱动外,还出现了采用步进电机,伺服电机,新型电磁铁等驱动结构以及光-液直接转换结构的伺服阀.这些新技术的应用不仅提高了伺服阀的性能, 而且为伺服阀发展开拓了思路, 为电液伺服阀技术注入了新的活力.2/新型材料的采用当前在电液伺服阀研制领域的新型材料运用,主要是以压电元件,超磁致伸缩材料及形状记忆合金等为基础的转换器研制开发.它们各具有其自己的优良特性.2.1 压电元件压电元件的特点是"压电效应":在一定的电场作用下会产生外形尺寸的变化,在一定范围内,形变与电场强度成正比.压电元件的主要材料为压电陶瓷(PZT),电致伸缩材料(PMN)等.比较典型的压电陶瓷材料有日本TOKIN 公司的叠堆型压电伸缩陶瓷等.PZT 直动式伺服阀的原理是: 在阀芯两端通过钢球分别与两块多层压电元件相连. 通过压电效应, 使压电材料产生伸缩驱动阀芯移动.实现电-机械转换.PMN 喷嘴挡板式伺服阀则在喷嘴处设置一与压电叠堆固定连接的挡板,由压电叠堆的伸,缩实现挡板与喷嘴间的间隙增减,使阀芯两端产生压差推动阀芯移动.目前压电式电-机械转换器的研制比较成熟并已得到较广泛的应用.它具有频率响应快的特点,伺服阀频宽甚至能达到上千赫兹,但亦有滞环大,易漂移等缺点,制约了压电元件在电液伺服阀上的进一步应用.2.2 超磁致伸缩材料液压与电气论坛超磁致伸缩材料(GMM)与传统的磁致伸缩材料相比,在磁场的作用下能产生大得多的长度或体积变化. 利用GMM 转换器研制的直动型伺服阀是把GMM 转换器与阀芯相连,通过控制驱动线圈的电流,驱动GMM 的伸缩,带动阀芯产生位移从而控制伺服阀输出流量.该阀与传统伺服阀相比不仅有频率响应高的特点,而且具有精度高,结构紧凑的优点.目前,在GMM 的研制及应用方面,美国,瑞典和日本等国处于领先水平.国内浙江大学利用GMM 技术对气动喷嘴挡板阀和内燃机燃料喷射系统的高速强力电磁阀, 进行了结构设计和特性研究.从目前情况来看GMM 材料与压电材料和传统磁致伸缩材料相比,具有应变大,能量密度高,响应速度快,输出力大等特点.世界各国对GMM 电-机械转换器及相关的技术研究相当重视,GMM 技术水平快速发展,已由实验室研制阶段逐步进入市场开发阶段.今后还需解决GMM 的热变形,磁晶各向异性,材料腐蚀性及制造工艺, 参数匹配等方面的问题,以利于在高科技领域得到广泛运用.2.3 形状记忆合金形状记忆合金(SMA)的特点是具有形状记忆效应.将其在高温下定型后,冷却到低温状态,对其施加外力.一般金属在超过其弹性变形后会发生永久变形,而SMA 却在将其加热到某一温度之上后, 会恢复其原来高温下的形状. 利用其特性研制的伺服阀是在阀芯两端加一组由形状记忆合金绕制的SMA 执行器, 通过加热和冷却的方法来驱动SMA 执行器, 使阀芯两端的形状记忆合金伸长或收缩, 驱动阀芯作用移动, 同时加入位置反馈来提高伺服阀的控制性能.从该阀的情况来看,SMA 虽变形量大,但其响应速度较慢,且变形不连续, 也限制了其应用范围.与传统伺服阀相比,采用新型材料的电-机械转换器研制的伺服阀,普遍具有高频响, 高精度,结构紧凑的优点.虽然目前还各自呈在某些关键技术需要解决,但新型功能材料的应用和发展,给电液伺服阀的技术发展发展提供了新的途径.3/电子化,数字化技术的运用液压与电气论坛目前电子化, 数字化技术在电液伺服阀技术上的运用主要有两种方式: 其一,在电液伺服阀模拟控制元器件上加入D/A 转换装置来实现其数字控制.随着微电子技术的发展,可把控制元器件安装在阀体内部,通过计算机程序来控制阀的性能,实现数字化补偿等功能.但存在模拟电路容易产生零漂,温漂,需加D/A 转换接口等问题.其二, 为直动式数字控制阀. 通过用步进电机驱动阀芯, 将输入信号转化成电机的步进信号来控制伺服阀的流量输出.该阀具有结构紧凑,速度及位置开环可控及可直接数字控制等优点,被广泛使用.但在实时性控制要求较高的场合,如按常规的步进方法,无法兼顾量化精度及响应速度的要求.浙江工业大学采用了连续跟踪控制的办法,消除了两者之间的矛盾,获得了良好的动态特性. 此外还有通过直流力矩电机直接驱动阀芯来实现数字控制等多种控制方式或伺服阀结构改变等方法来形成众多的数字化伺服阀产品.随着各项技术水平的发展,通过采用新型的传感器和计算机技术研制出机械,电子, 传感器及计算机自我管理(故障诊断,故障排除)为一体的智能化新型伺服阀.该类伺服阀可按照系统的需要来确定控制目标:速度,位置,加速度,力或压力.同一台伺服阀可以根据控制要求设置成流量控制伺服阀, 压力控制伺服阀或流量/ 压力复合控制伺服阀. 并且伺服阀的控制参数,如流量增益,流量增益特性,零点等都可以根据控制性能最优化原则进行设置.伺服阀自身的诊断信息,关键控制参数(包括工作环境参数和伺服阀内部参数)可以及时反馈给主控制器;可以远距离对伺服阀进行监控,诊断和遥控.在主机调试期间,可以通过总线端口下载或直接由上位机设置伺服阀的控制参数, 使伺服阀与控制系统达到最佳匹配,优化控制性能.而伺服阀控制参数的下载和更新,甚至在主机运转时也能进行.而在伺服阀与控制系统相匹配的技术应用发展中, 嵌入式技术对于伺服阀已经成为现实. 按照嵌入式系统应定义为:"嵌入到对像体系中的专用计算机系统"."嵌入性","专用性"与"计算机系统"是嵌入式系统的三个基本要素.它是在传统的伺服阀中嵌入专用的微处理芯片和相应的控制系统, 针对客户的具体应用要求而构建成具有最优控制参数的伺服阀并由阀自身的控制系统完成相应的控制任务(如各控制轴同步控制),再嵌入到整个的大控制系统中去.从目前的技术发展和控制系统对伺服阀的要求看, 伺服阀的自诊断和自检测功能应该有更大的发展. 结束语当前的液压伺服控制技术已经能将自动控制技术, 液压技术与微电子有机的结合起来, 形成新一代的伺服阀产品.而随着电子设备,控制策略,软件及材料等方面的发展与进步, 电液控制技术及伺服阀产品将在机,电,液一体化获得长足的进步.四 .电液伺服阀的发展历程液压控制技术的历史最早可追溯到公元前240 年,当时一位古埃及人发明了人类历史上第一个液压伺服系统――水钟. 然而在随后漫长的历史阶段, 液压控制技术一直裹足不前, 直到18 世纪末19 世纪初,才有一些重大进展.在二战前夕,随着工业发展的需要,液压控制技术出现了突飞猛进地发展,许多早期的控制阀原理及专利均是这一时代的产物.如: Askania 调节器公司及Askania-Werke 发明及申请了射流管阀原理的专利.同样, Foxboro 发明了喷嘴挡板阀原理的专利.而德国Siemens 公司发明了一种具有永磁马达及接收机械及电信号两种输入的双输入阀,并开创性地使用在航空领域.在二战末期,伺服阀是用螺线管直接驱动阀芯运动的单级开环控制阀.然随着控制理论的成熟及军事应用的需要, 伺服阀的研制和发展取得了巨大成就. 1946 年, 英国Tinsiey 获得了两级阀的专利;Raytheon 和Bell 航空发明了带反馈的两级阀;MIT 用力矩马达替代了螺线管使马达消耗的功率更小而线性度更好.1950 年,W.C.Moog 第一个发明了单喷嘴两级伺服阀.1953 年至1955 年间,T.H.Carson发明了机械反馈式两级伺服阀; W.C.Moog 发明了双喷嘴两级伺服阀; Wolpin 发明了干式力矩马达, 消除了原来浸在油液内的力矩马达由油液污染带来的可靠性问题.1957 年R.Atchley 利用Askania 射流管原理研制了两级射流管伺服阀.并于1959 年研制了三级电反馈伺服阀.1959 年 2 月国外某液压与气动杂志对当时的伺服阀情况作了12 页的报道, 显示了当时伺服阀蓬勃发展的状况.那时生产各种类型的伺服阀的制造商有20 多家.各生产厂家为了争夺伺服阀生产的霸权地位展开了激烈地竞争. 回顾历史, 可以看到最终取胜的几个厂家, 大多数生产具有反馈及力矩马达的两级伺服阀.我们可以看到, 1960 年的伺服阀已具有现代伺服阀的许多特点.如:第二级对第一级反馈形成闭环控制;采用干式力矩马达;前置级对功率级的压力恢复通常可达到50%;第一级的机械对称结构减小了温度,压力变化对零位的影响. 同时, 由早期的直动型开环控制阀发展变化而来的直动型两级闭环控制伺服阀也已出现.当时的伺服阀主要用于军事领域,随着太空时代的到来,伺服阀又被广泛用于航天领域,并研制出高可靠性的多余度伺服阀等尖端产品.与此同时,随着伺服阀工业运用场合的不断扩大,某些生产厂家研制出了专门使用于工业场合的工业伺服阀. Moog 公司就在1963 年推出了第一款专为工业场合使用的73 如系列伺服阀产品.随后,越来越多的专为工业用途研制的伺服阀出现了.它们具有如下的特征:较大的体积以方便制造;阀体采用铝材(需要时亦可采用钢材);独立的第一级以方便调整及维修;主要使用在14MPa 以下的低压场合;尽量形成系列化,标准化产品.然而Moog 公司在德国的分公司却将其伺服阀的应用场合主要集中在高压场合, 一般工作压力在21MPa,有的甚至到35MPa,这就使阀的设计专重于高压下的使用可靠性.而随着伺服阀在工业场合的广泛运用, 各公司均推出了各自的适合工业场合用的比例阀. 其特点为低成本, 控制精度虽比不上伺服阀, 但通过先进的控制技术和先进的电子装置以弥补其不足, 使其性能和功效逼近伺服阀.1973 年,Moog 公司按工业使用的需要,把某些伺服阀转换成工业场合的比例阀标准接口.Bosch 研制出了其标志性的射流管先导级及电反馈的平板型伺服阀.1974 年,Moog 公司推出了低成本,大流量的三级电反馈伺服阀.Vickers 公司研制了压力补偿的KG 型比例阀.Rexroth,Bosch 及其他公司研制了用两个线圈分别控制阀芯两方向运动的比例阀等等五. 电液伺服阀运转不良引起的故障1 油动机拒动在机组启动前做阀门传动试验时,有时出现个别油动机不动的现象,在排除控制信号故障的前提下,造成上述现象的主要原因是电液伺服阀卡涩。
伺服阀使用说明书伺服阀是DEH 控制系统中电液转换的关键元件,它可将电调装置发出的控制指令,转 变成相应的液压信号, 并通过改变进入油动机油缸液流的方向、压力和流量,来达到驱动阀门、控制机组的目的。
1结构特点伺服阀是一个由力矩马达、两级液压放大及机械反馈所组成的系统。
第一级液压放大是 双喷嘴挡板系统;第二级放大是滑阀系统。
其基本结构如图 1所示。
i.i 力矩马达:一种电气一机械转换器,可产生与电指令信号成比例的旋转运动,用在伺服 阀的输入级。
力矩马达包括电气线圈、极靴和衔铁等组件。
衔铁装在一个薄壁弹簧管上,弹 簧管在力矩马达和阀的液压段之间起流体密封作用。
衔铁、挡板和反馈杆刚性固接,并由薄壁弹簧管支撑。
1.2先导级:挡板从弹簧管中间伸出, 置于两个喷嘴端面之间, 形成左、右两个可变节流孔。
衔铁的偏转带动挡板, 从而可改变两侧喷嘴的开启, 使其产生压差,并作用于与该喷嘴相通 的滑阀阀芯端部。
1.3功率放大级:由一滑阀系统控制输出流量。
阀芯在阀套中滑动,阀套上开有环行槽,分 别与供油腔P 和回油腔T 相通。
当滑阀处于“零位”时,阀芯被置于阀套的中位;阀芯上 的凸肩恰好将进油口和回油口遮盖住。
当阀芯受力偏离“零位”向任一侧运动时, 导致油液 从供油腔P 流入一控制腔(A 或B ),从另一控制腔(B 或A )流入回油腔 T 。
阀芯推动反 馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。
当反馈力矩逐渐等于电磁力矩时, 衔铁挡板组件被移回到对中的位置。
于是,阀芯停留在某一位置。
在该位置上,反馈力矩等 于输入控制电流产生的电磁力矩,因此,阀芯位置与输入控制电流的大小成正比。
1.4 特点: 衔铁及挡板均工作在中立位置附近 , 线性好 喷嘴挡板级输出驱动力大 阀芯基本处于浮动状态 , 不易卡住 阀的性能不受伺服阀中间参数的影响 , 阀的性能稳定 , 抗干扰能力强 , 零点漂移小 圃定节流口 F芯阀F駅肝—— 控轴畫的出逵电插2 工作原理:当力矩马达没有电信号输入时,衔铁位于极靴气隙中间,平衡永久磁铁的磁性力。
第2讲电液伺服阀工作原理与组成
电液伺服阀是一种通过电磁力来控制液压流量的装置。
它由电磁铁、
阀芯、阀板、弹簧、导向阀等部件组成。
电液伺服阀的工作原理可以简单
描述如下:
当电流通过电磁铁时,产生的电磁力会使阀芯向下移动,同时压缩弹簧。
阀芯下移时,与阀板之间的间隙变大,液压油从进油口流入阀芯内部
并通过阀板上的小通道进入下游腔。
同时,在阀芯的上方形成了一个压力腔,进油口被关闭。
当需要控制液压流量时,通过控制电流的大小和方向来控制阀芯的移动。
通过改变间隙的大小,可以调整液压油流入下游腔的量,从而控制液
压流量的大小。
电液伺服阀的组成和功能如下:
1.电磁铁:产生电磁力,控制阀芯的移动。
2.阀芯:通过电磁铁的作用而移动,调节液压油的流量。
3.阀板:阀芯移动时与阀板之间的间隙改变,控制液压油的流动方向
和量。
4.弹簧:阀芯上方的弹簧通过压缩保持阀芯的位置稳定。
5.导向阀:控制液压油的流动方向和量,确保液压系统的正常工作。
电液伺服阀的工作原理和组成使其在许多液压系统中得到广泛应用。
它可以控制液压系统的速度、压力和位置,提高系统的响应速度和稳定性。
电液伺服阀通常用于工程机械、船舶、航空航天等领域,以满足复杂的运
动控制需求。