第三章--三相异步电动机的电力拖动
- 格式:doc
- 大小:663.50 KB
- 文档页数:16
电力拖动知识点总结电力拖动是一种利用电动机作为传动装置的动力传动方式,广泛应用于工业生产中的各个领域,如工厂生产线的输送设备、机械加工设备、自动化装配线和物流输送系统等。
电力拖动系统具有高效、稳定、可靠的特点,能满足现代工业对动力传动的需求。
本文将对电力拖动的基本原理、主要组成部分、常见故障及维护保养等方面进行详细的介绍和总结。
一、基本原理电力拖动系统的基本原理是利用电动机产生的电能转换为机械能,驱动各种传动装置完成工作。
其中,电能通过电源系统供给电动机,经过电动机内部的电磁场作用,产生旋转力矩驱动负载进行工作。
电力拖动系统的基本原理主要包括电源系统、电动机、传动装置和控制系统等几个方面。
1. 电源系统电力拖动系统的电源系统一般采用交流电源或直流电源,根据实际需要进行选择。
在工业生产中,交流电源应用更为广泛,其特点是输送距离远、输出功率大、电源稳定性好,适合长距离输电和大功率负载。
而直流电源系统功率较小,通常用于小功率负载或特殊工况的应用。
2. 电动机电力拖动系统的核心部件是电动机,其主要作用是将电能转换为机械能,驱动负载进行工作。
根据实际需要,电动机可分为交流电动机和直流电动机两种类型。
交流电动机通常采用同步电动机或异步电动机,具有结构简单、维护方便、功率范围广等特点;而直流电动机具有速度调节范围广、起动力矩大、转速稳定等优点,在某些特殊场合得到广泛应用。
3. 传动装置传动装置是电力拖动系统的关键组成部分,用于将电动机产生的旋转力矩传递给负载进行工作。
常见的传动装置包括联轴器、减速机、齿轮传动、带传动等,其选择应根据实际工况及传动比、传动效率等因素进行综合考虑,以确保系统的工作效率和可靠性。
4. 控制系统电力拖动系统的控制系统用于对电动机进行启停、速度调节、方向控制等操作。
常见的控制方式包括手动控制、自动控制和远程控制等,可根据实际需要选择。
现代工业生产中,自动化程度越来越高,电力拖动系统的控制系统也逐渐向着智能化、网络化方向发展,以满足高效、精密的工业生产需求。
第二章 直流电机的电力拖动2-23 一台他励直流电动机,铭牌数据为P N =60kW ,U N =220V ,I N =305A ,n N =1000r/min ,试求:(1) 固有机械特性并画在坐标纸上。
(2) T =0.75T N 时的转速。
(3) 转速n =1100r/min 时的电枢电流。
解:(1)Ω=⨯-⨯=-=038.0)30530560000305220(21)(212N N N N a I P I u R , =-=ΦNa N N N e n R I U C min 208.01000038.0305220⋅=⨯-r V min 1058208.02200r C U n N e N ===φ m N I C T N N e N ⋅=⨯⨯==8.605305208.055.955.9φ∴通过(1058,0)及(1000,605.8)可以作出固有机械特性(2)时N NT N e Na N e N T T C C T R C U n 75.0=∴-=φφφ min 1016208.0208.055.98.60575.0038.0208.0220r n =⨯⨯⨯⨯-=(3)n=1100r/minN Ne a N e N I C RC U n φφ-=A R C n C U I a N e N e N N 9.229038.0208.0)11001058()(-=-=-=∴φφ 2-24 电动机的数据同上题,试计算并画出下列机械特性:(1) 电枢回路总电阻为0.5R N 时的人为机械特性。
(2) 电枢回路总电阻为2R N 的人为机械特性。
(3) 电源电压为0.5U N ,电枢回路不串电阻时的人为机械特性。
(4) 电源电压为U N ,电枢不串电阻,ф=0.5фN 时的人为机械特性。
注:R N =U N /I N 称为额定电阻,它相当于电动机额定运行时从电枢两端看进去的等效电阻。
解:(1)Ω===721.0305220N N N I U R 当外串后总电阻为0.5R n 时:T T C C R C U n NT N e nN e N 874.010585.0-=⋅-=φφφ (2)当电枢总电阻为Ω=442.12n R 时:T T C C R C U n NT N e nN e N 49.310582-=⋅-=φφφ (3)N U U 5.0=T T C C R C U n N T e aN e N 092.0529)(5.02-=-=φφ (4)N φφ5.0=T T C C R C U n N T e aN e N 368.02116)(25.05.02-=-=φφ2-25 Z2—71型他励直流电动机,P N =7.5kW , U N =110V , I N =85.2A , n N =750r/min ,R a =0.129Ω。

《电机与拖动基础》习题解答第一章 直流电机原理P331-21一台并励直流发电机N P =16kW , N U =230V,N I =69.6A ,N n =1600r/min,电枢回路电阻a R =0.128Ω,励磁回路电阻f R =150Ω,额定效率N η=85.5%.试求额定工作状态下的励磁电流、电枢电流、电枢电动势、电枢铜耗、输入功率、电磁功率。
解:fN I =N f U R =230150=1.53A aN I =N I +fN I =69.6+1.53=71.13A aN E =N U +aN I a R =230+71.130.128⨯=239.1Vcua p =2aN I a R =271.130.128⨯=647.6WaN E aN I =239.171.13⨯=17kW输出功率1N p =N N P η=1685.5%1685.5%=18.7kW1-29并励直流发电机N P =7.5kW , N U =220V , N I =40.6A , N n =3000r/min,Ra=0.213Ω.额定励磁电流fN I =0.683A,不计附加损耗,求电机工作在额定状态下的电枢电流、额定效率、输出转矩、电枢铜耗、励磁铜耗、空载损耗、电磁功率、电磁转矩及空载转矩。
解: a I =N I -fN I =40.6-0.683=40AP 1=N U N I =22040.6⨯=8932W N η=1N p p 100%⨯=75008932100%⨯=84% 2T =9550N N p n =95507.53000⨯=24N ·m cua p =2a I Ra=240⨯0.213=341W2203220.683N f fN U R I ===Ω 2cuf fN f p I R =∙=2200.683N fN U I ∙=⨯=150W0189327500341150941N cua cuf p P P p p =---=---=189323411508441M cua cuf P p p p =--=--=WT =9550M Np n =95508.4413000=27 N ·m 02T T T =-=27-24=3 N ·m第二章 电力拖动系统的动力学P482-9 负载的机械特性又哪几种主要类型?各有什么特点?答:负载的机械特性有:恒转矩负载特性、风机、泵类负载特性以及恒功率负载特性,其中恒转矩负载特性又有反抗性恒转矩负载与位能性恒转矩负载,反抗性负载转矩的特点是它的绝对值大小不变,但作用方向总是与旋转方向相反,是阻碍运动的制动性转矩,而位能性转矩的特点是转矩绝对值大小恒定不变,而作用方向也保持不变。
电力拖动——三相异步电动机简述一、电力拖动的相关概念:以电动机作为原动机拖动机械设备运动的一种拖动方式。
又称电气传动。
凡是由电动机作为动力拖动各类生产机械,完成一定的生产工艺要求的系统,统称为电力拖动系统。
按照拖动电动机供电电流制式不同,可以将拖动系统划分为直流拖动系统和交流拖动系统两大类。
按工作原理分类可分为异步和同步电动机。
在生产上主要用的是交流电动机,特别是三相异步电动机。
因为它具有结构简单、坚固耐用、运行可靠、价格低廉、维护方便等优点。
它被广泛地用来驱动各种金属切削机床、起重机、锻压机、传送带、铸造机械、功率不大的通风机及水泵等。
仅在需要均匀调速以及在某些电力牵引和起重设备中才采用直流电动机。
同步电动机主要应用于功率较大、不需要调速、长期工作的各种生产机械,如压缩机、水泵、通风机等。
二、三相异步电动机简述:交流电动机有异步电动机和同步电动机两类。
异步电动机又分为鼠笼式、绕线式,其中鼠笼式应用最广泛。
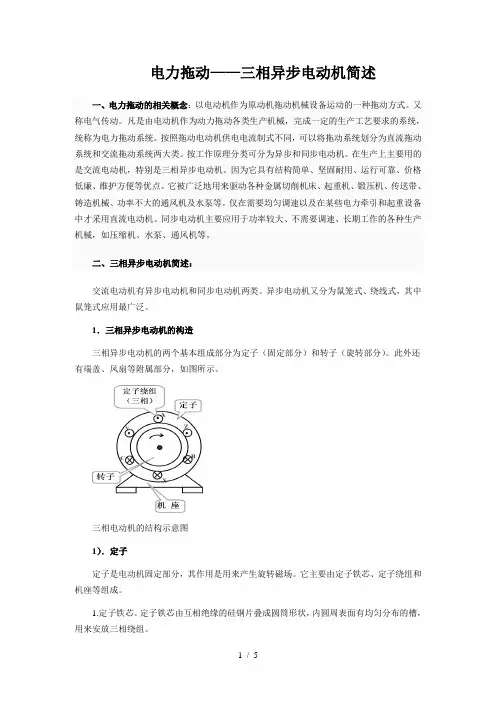
1.三相异步电动机的构造三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。
此外还有端盖、风扇等附属部分,如图所示。
三相电动机的结构示意图1).定子定子是电动机固定部分,其作用是用来产生旋转磁场。
它主要由定子铁芯、定子绕组和机座等组成。
1.定子铁芯。
定子铁芯由互相绝缘的硅钢片叠成圆筒形状,内圆周表面有均匀分布的槽,用来安放三相绕组。
2.定子绕组。
定子绕组由许多线圈连接而成。
线圈由带有绝缘的铜导线或铝导线绕制而成。
三相定子绕组的三个首端和三个末端分别接在电动机出线盒的6个接线柱上。
3.机座。
2).转子转子是电动机转动部分,由转子铁芯、转子绕组和转轴等部件组成。
其作用是在旋转磁场作用下获得转动力矩。
按照构造的不同,转子分为鼠笼式和绕线式两种。
1.鼠笼式转子。
这种转子用铜条安装在转子铁芯槽内,两端用端环焊接,形状像鼠笼。
对于中、小功率的电动机(100kW以下)目前大部分采用铸铝方式。
直流电机1、直流电机的静止部分称为定子,它的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置、等部分组成。
转动部分称为转子,它的作用是产生电磁转矩和感应电动势,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
2、单叠和单波绕组,极对数均为p时,并联支路数分别为2p 、 2 。
3、直流电机电枢绕组有叠绕组和波绕组两种基本联接方式,一般来说对电流大、电压较低的直流电机,电枢绕组应采用叠绕组。
4、直流电机的电枢反应的定义是通常把电枢磁动势对空载气隙磁通密度分布的影响称为电枢反应,当电刷在几何中性线时,对于电动机来讲,产生气隙磁场畸变性质的电枢反应,其结果使前极端磁场增强和后极端磁场减弱,物理中性线(逆着)电枢旋转方向偏移。
5、电枢绕组的感应电动势简称电枢电动势。
电枢电动势是指直流电机正、负电刷之间的感应电动势,也就是电枢绕组一条并联支路的感应电动势。
6、直流电机的电磁转矩是由电枢电流和磁场共同作用产生的。
直流发电机电磁转矩的方向和电枢旋转方向相反,直流电动机电磁转矩的方向和电枢旋转方向相同。
7、直流电机电枢绕组中一个元件经过电刷短路从一条支路转到另一条支路里时,电流的方向改变的过程称为换向。
改善换向的方法一般有装换向极和选择合适的电刷两种方法。
8、直流电机的励磁方式有并励、他励、串励和复励。
9、并励直流发电机自励建压的条件是电机磁路中要有剩磁、励磁绕组并联到电枢两端的极性正确、励磁回路的总电阻小于该转速下的临界电阻。
10、直流电动机的工作特性是指电动机在端电压U=U N、励磁电流I=I N、电枢回路不串电阻的条件下,电动机的转速n、电磁转矩T、效率与电枢电流I a之间的关系。
11、可用下列关系来判断直流电机的运行状态,当 U=E a+R a I a时为电动机状态,当 U=E a-R a I a时为发电机状态。
12、直流电机的转向是由电枢电流方向和磁场方向确定的,改变转向的方法有改变电枢电流方向和改变励磁方向两种。
第一章 直流电机1-3 直流发电机和直流电动机中的电磁转矩 T 有何区别?它们是怎样产生的?而直流 发电机和直流电动机中的电枢电动势, E a 又有何区别?它们又是怎样产生的?解:直流发电机的电磁转矩 T 是制动性质的,直流电动机的电磁转矩 T 是驱(拖)动 性质的, 它们都是由载流导体在磁场中受到的电磁力, 形成了电磁转矩; 直流发电机的电枢 电动势 E a 大于电枢端电压 U ,直流电动机的电枢电动势 E a 小于电枢端电压 U ,电枢电动势 E a 都是运动导体切割磁场感应产生的。
1-4 直流电机有哪些主要部件?各起什么作用? 解:直流电机的主要部件有定子:主磁极(产生主极磁场) 、机座(机械支撑和导磁作 用)、换向极(改善换向) 、电刷(导入或导出电量) ;转子:电枢铁心(磁路的一部分,外 圆槽中安放电枢绕组) 、电枢绕组(感应电动势,流过电流,产生电磁转矩,实现机电能量 转换)、换向器(与电刷一起,整流或逆变)1-5 直流电机里的换向器在发电机和电动机中各起什么作用? 解:换向器与电刷滑动接触,在直流发电机中起整流作用,即把线圈(元件)内的交变 电整流成为电刷间方向不变的直流电。
在直流电动机中起逆变作用, 即把电刷间的直流电逆 变成线圈(元件)内的交变电,以保证电动机能向一个方向旋转。
1-6 一台 Z2 型直流发电机, P N 145kW ,U N 230V , n N 1450r /min, 求该发电机1-7 一台 Z2 型直流发电机, P N 160kW ,U N 220V, N 90%,n N 1500r / min,求该额定电流是多少?1-10 电枢反应对气隙磁场有何影响? 解:电枢反应使合成磁场发生畸变,磁路饱和时有去磁作用。
1-11 有一台四极直流电机,电枢绕组为单叠整距绕组, 每极磁通为 3.5× 10-2Wb ,电枢总导线数 N=152,转速 n 1200 r / min 。
第三章 三相异步电动机的电力拖动3-1 何谓三相异步电动机的固有机械特性和人为机械特性?答:固有特性:异步电机在额定电压和频率下,按规定的接线方式接线,定、转子外接电阻为零时的n 与T 的关系。
人为特性:人为改变电动机参数或电源参数而得到的机械特性。
3-2 三相笼型异步电动机的起动电流一般为额定电流的4~7倍,为什么起动转矩只有额定转矩的0.8~1.2倍?答:由起动时s=1,由222222)(cos x sr s r '+''=θ很小,约0.2左右;另一方面,st I 大,引起定子漏阻抗压降大,电动势E 1减小,主磁通m φ减小。
由于这两方面原因所致。
3-3 异步电动机的最大转矩T max 受哪个参数变化的影响最大?试从物理意义上解释其原。
解:m ax T 受电压参数变化影响很大。
3-4 三相异步电动机的机械特性,当0<s <s m 时,电磁转矩T 随转差率s 的增大而增加,当s m <s <1时,电磁转短随转差率的增大而减小,为什么? 答:由于221212221212111)()()(L L w s r sr r sw w u p m T '++'+'= 当s 很小时,忽略分母中s 各项, s r sw w u p m T ∝'≈212111)(; 当)1,(m s s ∈时,可以忽略式中分母中的2r ',即s L L w r s r w w u p m T 1])([)(2212121212111∝'++'≈3-5 为什么通常把异步电动机机械特性的直线段称为稳定运行区,而把它的曲线段称为不稳定运行区?曲线段是否有稳定运行点?答:对于恒转矩负载而言,只有特性的直线段满足稳定运行条件,曲线段不满足。
但若是对于风机、泵类负载整条特性都满足条件,都是稳定工作区域。
3-6 三相异步电动机电磁转矩与电源电压大小有什么关系?如果电源电压比额定电压下降30%,电动机的最大转矩T max 和起动转矩T st 将变为多大?若电动机拖动的额定负载转矩不变,问电压下降后,电动机转速n 、定于电流I l 、转于电流I 2、主磁通φm 、定子功率因数cos φl 和转子功率因数cos φ2将有什么变化?答:2u T ∝,若N u u 7.0=',则st st T T T T 49.0,49.0max max='=',当电压下降后,n 减小,I 1与2I '增大,m φ减小,1cos φ与2cos φ降低。
3-7 容量为几个千瓦时,为什么直流电动机不允许直接起动,而笼型异步电动机可以直接起动?答:对于直流电机而言a N a R U I =,而对于感应电机221221)()(x x r r U I N st '++'+=,式中由于存在电抗,则此时a k R z >>,使得感应电机起动时电流增大倍数没有直流电机那么剧烈。
3-8 三相笼型异步电动机的起动方法有哪几种?各有何优缺点?各适用于什么条件? 答:各起动方法比较,如下表。
3-9 两台一样的笼型异步电动机同轴联接,起动时把它们的定于绕组串联,如图3-43所示,起动后再改成并联。
试分析这种起动方式时的起动转矩和起动电流,与把它们并联接电源起动相比较有什么不同? 答:即相当于21=α的定子串电阻减压起动,与直接并联起动相比,串联后并串并串,st st st st T T I I 412111==。
3-10 Y 系列三相异步电动机额定电压380V ,3kW 以下者为Y 接法,4kW 以上者为D 接法。
试问哪一种情况可以采用Y-D 降压起动?为什么? 答:后者可以即4kw 以上者,因为它在正常工作时是∆接法。
3-11 双笼式和深槽式异步电动机与一般笼型异步电动机相比有何优缺点?为什么?答:优点:起动性能好,即有较大起动转矩,较小起动电流。
缺点:功率因数和过载能力稍低,用铜多,制造工艺复杂 原因:利用集肤效应在起动时增大了转子电阻。
3-12 三相绕线转于异步电动机有哪几种起动方法?为什么绕线转于电动机的转于串频敏变阻器可以得到“挖土机机械特性”而串一个固定电阻却得不到?答;起动方法:直接起动、定子串电阻或电抗器降压起动、自耦变压器降压起动、∆-Y 起动、转子串频敏变阻器起动、转子串电阻起动。
由频敏变阻器随起动过程进行,自动根据s 减小所串入的电阻,参数选择合适时可以维持起动时间转矩不变。
3-13绕线转子异步电动机、转于电路串入适当电阻,为什么起动电流减小而起动转短反而增大?如串入的电阻太大,起动转矩为什么会减小?若串入电抗器,是否也会这样?答:因为串入电阻后,k z 值变大,故st I 1减小,而θφcos 2I C T m T st '=虽然21I I '≈减小, 但2cos θ增加更多,所以使st T 增大,当串入电阻太大时,2cos θ亦减小,使st T 减小,串电抗器不行,因为这样会使2cos θ始终减小。
3-14 如何从转差率s 的数值来区别异步机的各种运行状态。
答:10<<s 时,电机电动运行;∞<<s 1时,电机制动; 0<s 时,电机回馈发电运行。
3-15为使异步电动机快速停车,可采用哪几种制动方法?如何改变制动的强弱?试用机械特性说明其制动过程。
答:(1)能耗制动:可以采用增大转子电阻或加大直流励磁来增强制动效果。
(2)两相反接的反接制动:可以采用转子串电阻来增大制动效果。
BATn0nABC 0T能耗制动两相反接的反接制动3-16 当异步电动机拖动位能性负载时,为了限制负载下降时的速度,可采用哪几种制动方法?如何改变制动运行的速度?其能量转换关系有何不同?答:可以采用能耗制动,转速反向的反接制动,回馈制动,通过改变转子所串电阻可以改变运行的速度。
3-17 异步电动机有哪几种制动运转状态?每种状态下的转差串及能量转换关系有什么不同?答:(1)能耗制动。
机械能转换为电能在外串电阻上消耗。
(2)反接制动。
21<<s ,机械能与定子输入的电磁能均被外串的转子电阻消耗。
(3)回馈制动。
0<s ,机械能转变为电能回馈回电网。
3-18 异步电动机在哪些情况下可能进入回馈制动状态?它能否像直流电动机那样,通过降低电源电压进入回馈制动状态?为什么?答:(1)带位能负载,定子任意两相反接。
(2)变极调速时 (3)变频调速时 (4)电车下坡时不能通过改变电压而进入回馈状态,因为此时没有改变同步运行点n 1的大小。
3-19 影响异步电动机起动时间的因素是什么?如何缩短起动时间?起动时能量损耗与哪些因素有关? 如何减少起动过程中的能量损耗?答:影响起动的时间因素:机电时间常数T m 和m S 。
缩短起动时间可以通过改变T m ,即采用小转动惯量电机,以及采用高转差率电机,缩短起动时间。
影响起动时能量损耗因素:系统性能、21,r n '。
可以采用减小系统性能,降低同步转速,增大2r '方法来减小损耗。
3-20 绕线转子异步电动机转子突然串入电阻后电动机降速的电磁过程是怎样的?如负载转矩T L 为常数,当系统达到稳定时转子电流是否会变化?为什么?答:当转子突然串入电阻后,电动机所发出的电磁转矩减小,使L T T 〈,此时电机转速没变,在负载作用下,开始减速,同时T 增大,当T=T L 时,电机稳定运行,再次稳定后,转子电流不变。
因为此时222r R rs s s N N +=,对于等效电路不影响。
3-21在绕线转子异步电动机转子电路中串接电抗器能否改变转速?这时的机械特性有何不同?答:可以改变转速,211x x s m '+∝,随着所串电抗器的增大s m 减小。
3-22 绕线转子异步电动机转子串电阻调速时,为什么他的机械特性变软?为什么轻载时其转速变化不大?答:串电阻后,s m 随着R 的增大而增大。
这样0~m s 这个稳定工作区域增大,特性变软。
由于串电阻不改变同步转速,故所有的人为特性均通过纵轴上同一个点,这样越靠近纵轴即轻载时,调速范围越小。
3-23为什么调压调速不适用于普通笼型异步电动机而适宜用于特殊笼型异步电动机或绕线转子异步电动机?答:因为调压调速的范围是0~s m ,为了扩大调速范围,只有采用高转差率电机或者在转子回路串电阻。
3-24 为什么调压调速必须采用闭环调速系统?答:单纯调节电压来调速,调速范围太小,串了电阻后特性又太软,为了克服这些问题故采用闭环调速系统。
3-25 怎样实现变极调速?变极调速时为什么同时要改变定子电源的相序? 答:通过改变定子绕组的接法,当变极后,将会引起绕组相序的变化,故要改变定子相序。
3-26如采用多速电动机配合调压调速来扩大平滑调速的范围,问应采取哪种变极电动机较合理(D-YY 还是(Y-YY ),为什么?答:采用Y – YY 变极电机更合理,它可以在变极后同时增大过载能力。
3-27变频调速时,为什么需要定子电压随频率按一定的规律变化?试举例说明之。
答:1111111,44.4f u kw N f E u m m ∝=≈φφ , 当1f 变化时,为使m φ保持恒定,1u 也要随1f 同时变。
3-28 几种分析讨论以下异步电机变频调速控制方式的机械特性及优点(1)恒电压频率比(U 1/f 1=c )控制; (2)恒气隙电势频率比(E 1/f 1=c )控制; (3)恒转子电势频率比(E r /f 1=g)控制; 答:(1)恒电压频率比(c f u =11)控制 机械特性:1)1n 随1w 变化2)不同频率下机械特性为一组硬度相同的平行直线 3)m ax T 随频率降低而减小优点:m φ近似不变,控制简单,易于实现。
(2)恒气隙电动势频率比(c f E =11)控制 机械特性:1)与恒压频比控制时性质相同。
2)低频起动转矩比额定频率起动转矩大,而起动电流并不大。
3)m ax T 不随1f 变化。
优点:m φ恒定,稳定性优于恒压频比时 (3)恒转子电动势/频率比(c f E r=1)控制机械特性:是一条准确的直线。
优点:稳定工作特性最好,类似他励直流电动机。
3-29 保持恒气隙电势频率比控制中,低频空载时可能会发生什么问题,如何解决。
答:会出现负载愈轻电流愈大的问题,可以采用电流反馈控制,使低频时电压降低。
3-30填写下表中的空格 解:3-31 一台三相绕线转于异步电动机,已知:P N =75kW ,n N =720r/min I 1N =148A ,ηN =90.5%,cos φ1N =0.85,λT =2.4,E 2N =213V ,I 2N =220A 。