2013第四章 工业机器人数学基础资料
- 格式:ppt
- 大小:6.02 MB
- 文档页数:46
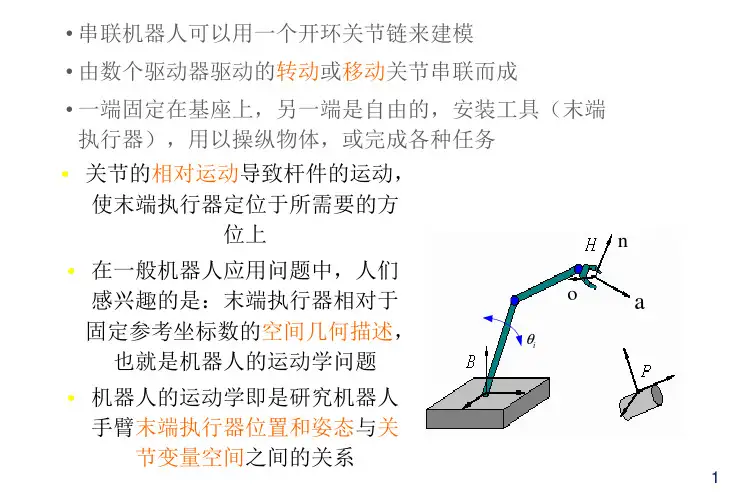
机器人机构学的数学基础引用机器人机构学是机器人学中的一个重要领域,它研究机器人的结构、运动及其控制等问题。
机器人机构学的研究需要运用到一定的数学知识。
本文将就机器人机构学的数学基础进行引用和总结。
一、向量和矩阵机器人机构学中常用向量和矩阵来表示机器人的位置、姿态、运动等信息。
向量是一个具有大小和方向的量,可以用来表示位置、速度、加速度等物理量。
矩阵则是由多个向量组合而成,可以用来表示变换、旋转、平移等变换。
在机器人机构学中,常用齐次坐标系来表示机器人的位置和姿态。
二、三角函数三角函数是机器人机构学中常用的数学工具。
在机器人运动学中,三角函数可以用来描述机器人的角度、朝向、运动路径等信息。
常用的三角函数有正弦函数、余弦函数、正切函数等。
例如,正弦函数可以表示机器人关节的位置,余弦函数可以表示机器人末端执行器的位置。
三、相似变换和仿射变换相似变换是机器人机构学中常用的一种变换方式,它保持物体的形状不变但可以改变物体的大小和位置。
相似变换需要用到欧氏变换、即平移和旋转。
在机器人机构学中,常用相似变换来描述机器人的运动学结构。
仿射变换也是机器人机构学中常用的一种变换方式,它可以改变物体的形状和大小,而且可以进行平移、旋转和剪切等操作。
在机器人机构学中,仿射变换常用于描述机器人末端执行器的位置和姿态。
四、李群和李代数李群和李代数是机器人机构学的重要数学工具。
李群是一种数学对象,它描述了物体的对称性和运动规律。
李代数则是对李群进行线性化的结果,它可以求出物体在某一点的切空间。
在机器人机构学中,李群和李代数可以用来描述机器人的变换及其群结构。
总结:机器人机构学的数学基础涉及到向量和矩阵、三角函数、相似变换和仿射变换以及李群和李代数等领域。
这些数学概念和工具可以帮助机器人机构学家更加准确地描述机器人的位置、姿态、运动及其控制方式,从而为机器人的应用研究提供有力的数学支撑。