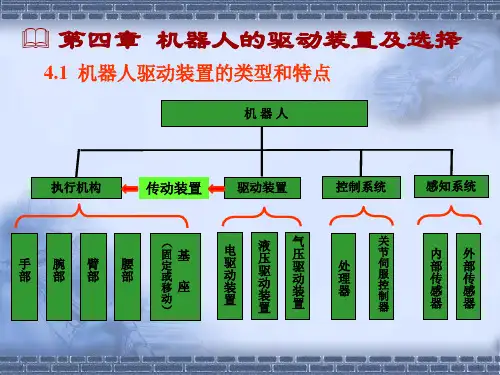
2.5 机器人的驱动与传动
- 格式:ppt
- 大小:1.88 MB
- 文档页数:38
机器人概论第三章机器人的动力与驱动随着科技的迅速发展,机器人已经逐渐走入了人们的生活中。
机器人的动力与驱动系统是其能够行动和工作的基础。
本文将介绍机器人动力与驱动的概念、种类以及应用。
一、机器人动力与驱动的概念机器人动力与驱动系统是机器人能够产生动力和运动能力的关键部分。
它通过驱动机体的各个部件,使得机器人能够执行各种操作和任务。
从根本上来说,机器人动力与驱动包括两个方面:动力系统和驱动系统。
动力系统是机器人的能量来源,可以通过电力、气压或液压等方式提供机器人的动力。
而驱动系统则是将动力传递给机器人各个部件的机构。
二、机器人动力的种类机器人的动力可以分为以下几种类型:1. 电动动力:电动机是机器人中最常见的动力源之一。
通过电源供给电动机,通过电磁感应原理产生磁场,进而驱动机械部件的运动。
电动机具有结构简单、可控性高等特点,在机器人中得到广泛应用。
2. 液压动力:液压系统利用流体的力学性质传递动力。
通过液压泵将流体送入液压马达或液压缸中,产生高压力使得机械部件运动。
液压动力具有传动效率高、承载能力大等优点,广泛应用于需要大扭矩和大力的机器人。
3. 气动动力:气动系统以气体为介质传递能量。
通过气压产生作用力,驱动机械部件的运动。
气动动力具有结构简单、响应快速等优势,在一些对响应速度和重量要求较高的应用中得到广泛应用。
三、机器人驱动系统的种类机器人的驱动系统可以根据其机构分类:1. 电力传动:电力传动是机器人中最常见的驱动方式之一。
通过电动机驱动齿轮、皮带等进行机械传动,将动力传递给机器人各个关节实现运动。
2. 液压传动:液压传动通过液压泵、阀门等控制液压系统,实现对各个机械部件的驱动。
3. 气动传动:气动传动通过空气压力控制,通过气压驱动气缸或气动执行器,实现机器人运动。
四、机器人动力与驱动在实际应用中的意义机器人动力与驱动系统在实际应用中起着至关重要的作用。
首先,合理的动力与驱动系统设计能够提高机器人的工作效率和性能。
《工业机器人技术》课程教学大纲课程名称:工业机器人技术英文名称:Industry Robot Technology课程编码:学时/学分:18/1课程性质:选修适用专业:机械设计制造及其自动化先修课程:理论力学,机械原理,机械设计,液压传动,自动控制理论一、课程的目的与任务《工业机器人技术》是一门培养学生具有机器人设计和使用方面基础知识的专业选修课,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
其主要任务是培养学生:1、掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2、掌握工业机器人整体性能、主要部件性能的分析方法;3、掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4、了解工业机器人的新理论,新方法及发展趋向。
二、教学内容及基本要求第一章绪论教学目的和要求:了解工业机器人的发展及现状,结构原理及应用情况。
教学重点和难点:介绍工业机器人的产生和发展过程,掌握机器人的概念、特点、工业机器人的基本分类、工业机器人的应用、工业机器人的组成以及主要性能参数,工业机器人的手部、腕部、臂部、机座的结构原理和实例。
教学方法与手段:课堂教学第一节机器人的分类第二节工业机器人的应用和发展1.2.1 工业机器人的应用1.2.2 工业机器人的发展第三节工业机器人的基本组成及技术参数1.3.1 工业机器人的基本组成1.3.2 工业机器人的技术参数1.3.3 工业机器人的坐标1.3.4 工业机器人的参考坐标系习题第二章工业机器人机构教学目的和要求:本部分介绍常用机器人机构,要求学生掌握常用机器人机构设计形式。
教学重点和难点:主要介绍机器人末端操作器、手腕、手臂及机器人驱动与传动形式。
教学方法与手段:课堂教学第一节机器人末端操作器2.1.1 夹钳式取料手2.1.2 吸附式取料手2.1.3 专用操作器及转换器2.1.4 仿生多指灵巧手2.1.5 其它手第二节机器人手腕2.2.1 手腕的分类2.2.2 手腕的典型结构2.2.3 柔顺手腕结构第三节机器人手臂第四节机器人机座2.4.1 固定式机器人2.4.2 移动式机器人第五节工业机器人的驱动与传动2.5.1 直线驱动机构2.5.2 旋转驱动机构2.5.3 直线驱动和旋转驱动的选用和制动2.5.4 工业机器人的传动2.5.5 新型的驱动方式2.5.6 驱动传动方式的应用习题第三章机器人运动学教学目的和要求:机器人运动学主要研究两个问题:一个是运动学问题,即给定机器人手臂、腕部等各个构件的几何参数及各个关节变量求机器人手部对参考坐标系的位置和姿态;介绍机器人的微移动和微转动概念、两坐标系间的微分运动关系、变换式(方程)中的微分关系、机器人雅可比矩阵的概念、求法——微分变换法;了解逆雅可比矩阵的概念和求解。


简述工业机器人传动系统的主要传动形式及主要区别
工业机器人传动系统的主要传动形式包括:电机驱动、气动驱动和液压驱动。
电机驱动:电机驱动是目前工业机器人最常用的一种传动形式,主要包括直流电机、交流电机和伺服电机等。
气动驱动:气动驱动是指利用压缩空气作为能源,通过气缸、阀门等气动元件来实现工业机器人的运动。
液压驱动:液压驱动是指利用液体作为能源,通过液压缸、液压阀等液压元件来实现工业机器人的运动。
主要区别:
电机驱动的传动系统具有精度高、稳定性好、响应速度快等优点,但需要电源支持,存在散热问题,且电机噪音较大。
气动驱动的传动系统系统具有简单、成本低、可靠性高等优点,但精度不高,输出力矩限制较大,且需准备压缩空气的供应系统。
液压驱动的传动系统具有输出力矩大、运动平稳、环境适应性强,但液压系统成本较高,需要做好油品维护,同时有液压泄漏的风险。
机器人传动各部件关系
在机器人中,传动各部件的关系是非常重要的。
机器人的传动系统主要由减速器、电机、齿轮、链条、皮带和轴承等组成。
这些部件之间的关系紧密而又复杂。
减速器是机器人传动系统的核心。
它的主要作用是将高速的旋转转动变为低速的旋转转动,使得机器人能够更加精准地执行任务。
通常情况下,减速器的输出轴都是经过齿轮或链条的传动来实现的。
电机是机器人传动系统中的另一个重要组成部分。
电机转速一般比机械系统的转速高,因此需要通过减速器将其转速降低。
不同类型的电机有不同类型的减速器,常用的减速器类型包括行星齿轮减速器、斜齿轮减速器和螺旋伞齿轮减速器等。
齿轮和链条是机器人传动系统中常用的机械传动元件。
它们可以将旋转力从一个轴传递到另一个轴。
齿轮传动速度更稳定、精度更高,而链条传动则更适用于大功率、大转矩的传动。
皮带是机器人传动中可靠的传动元件。
由于其柔性和可靠性,它们通常用于需要平滑运动和低噪音的传动系统。
皮带传动由驱动轮和从动轮组成,并由皮带连接。
轴承是机器人传动系统中起重要支撑作用的组成部分。
它们使得机器人传动系统中各个部件之间可以相对地平稳地移动,同时还可以承受外部的压力。
不同类型的轴承包括球轴承、滚子轴承、圆锥轴承和滑动轴承等。
总的来说,机器人传动各部件的关系是相互联系、相互作用的。
它们通过协调配合,能够保证机器人运动的稳定性、精确性和效率。
通过了解和掌握机器人传动各部件的关系,我们可以更好地设计和维护机器人传动系统的稳定性和可靠性,实现机器人的高效运作。
机器人传动原理
机器人传动原理是指机器人的所有动作都是通过一些特定的驱动装置来实现的,这些
驱动装置一般是电机、气动装置或者液压装置等。
机器人传动装置的种类有很多,常用的有以下几种:
1.电机驱动
电机驱动是机器人最常用的一种传动方式,其使用电机作为驱动装置,通过变速箱、
减速器、传动链等结构直接传递力量和动能。
电机驱动方式可以分为交流电机驱动和直流
电机驱动两种。
交流电机驱动:交流电机驱动具有速度稳定、转矩大、噪音小等特点,适合于高精度、高速度的机器人应用。
2.气动驱动
气动驱动是指通过气压控制运动的一种机构,一般采用空气压缩机将气体压缩储存,
然后经过气路系统将气体引入到机器人的各个部位,控制执行器完成各种动作。
气动驱动的优点是速度快、响应速度快、重复精度高,但其噪音很大,能耗较大,需
要专门的空压站维护。
3.液压驱动
液压驱动是指通过液体流动的方式传递驱动力量,实现机器人的各种运动。
液压驱动
常用的液体是液压油,通过液压泵将液体压缩,然后通过压力管路将压缩后的液体传送到
机器人的执行机构完成运动。
液压驱动的特点是响应速度快、动力大、调整方便,但其运动惯量大,精度低,维护
困难且成本高昂。
以上几种机器人传动原理方式各有优缺点,可以根据机器人的应用需求选择其中一种
或多种传动方式。
不同的应用场景需要不同的传动方式和控制方法,才能实现机器人的高
效运动和精确控制。