多波束相控阵天线角跟踪性能及测试方法
- 格式:pdf
- 大小:922.92 KB
- 文档页数:6

多波束的校准方法及其成果分析探讨发布时间:2023-02-20T06:00:53.564Z 来源:《建筑实践》2022年10月19期作者:李烁[导读] 随着卫星技术的不断发展,遥感图像的获取越来越普遍李烁天津市陆海测绘有限公司摘要:随着卫星技术的不断发展,遥感图像的获取越来越普遍,尤其是在低轨卫星对地观测领域。
遥感图像的分辨率要求越来越高,对遥感图像的处理也提出了更高的要求。
多波束由于能够同时对同一区域不同波段进行成像,在很多场合下可以发挥重要作用。
因此,为了提高多波束的观测质量,需要定期对多波束数据进行校正。
为了保证校正结果能够符合实际情况和预期要求,必须建立合理的校正方法。
本文将对多波束的校准方法及校准成果进行探讨。
关键词:多波束;校准方法;成果分析前言为了提高多波束测量精度和效率,在实际应用中需要对其进行合理优化设计。
首先,要选择合适的测区模型,并且还要保证所选用的测区模型具有较高的准确性;然后,要根据不同的测区特点来确定相应的数据处理方式,这样才能够使得数据采集工作更加高效地开展起来。
该方式具有较高的准确性和可靠性,并且还具备了一定的灵活性,因此在实际应用中能够得到广泛应用。
但是由于其自身存在着一些不足之处,所以需要相关人员不断改进与完善。
1 多波束校正参数概述1.1横摇偏差纵摇偏差艏向偏差简介它有别于常规的单波束点和线状测量,它是一种平面测量。
多波束式传感器由于其自身的主观因素,无法实现全水平定位,造成其与实际水平面存在倾斜度,我们习惯把换能器与船只水平面纵向的夹角称为纵摇偏差(pitch),换能器与船只水平面垂直方向的夹角为横摇偏差(roll)。
在实际测量中,由于船只的运动会导致换能器与水平面也产生一个夹角,所以对应某一时刻t,换能器的横摇角roll(t)、纵摇角pitch(t)都由两部分组成:roll(t)=roll(静)+roll(动)pitch(t)=pitch(静)+pitch(动)即roll(t)、pitch(t)都包含一个动态分量和一个静态分量。

基于相控阵雷达的多波束低角跟踪方法摘要:对低空/超低空目标进行跟踪测量时,雷达波束照射到海面上,此时雷达接收到的回波信号是目标的回波与海面反射信号之和,这将造成雷达测量出的回波相位中心不能指向目标,而是随目标的距离和高度变化起伏,从而形成了多路径误差,如果不采取一定措施,雷达将无法稳定开展目标跟踪,甚至会导致目标丢失。
多路径效应与雷达架高、目标高度、目标距离、雷达工作频率、海面反射系数、雷达电磁波极化等因素均有关系。
一直以来,对低空目标的探测与跟踪性能都是跟踪雷达的核心指标,是影响雷达反导防空性能的主要瓶颈。
关键词:相控阵雷达;多波束与常规体制雷达比较,相控阵雷达有着波束控制灵活、反应迅速、能同时进行多目标跟踪测量等优势。
在低空目标探测与跟踪方面,根据多路径误差产生机理,相控阵雷达采用同时多波束、多频率模式进行低角跟踪,理论上能够抑制多路径效应,提高雷达低角跟踪精度。
1 多径模型及测角误差1.1 多径模型采用平面多径反射模型来分析多路径对雷达目标测量的影响,如图1所示,直射返回的路径为Rd,直射返回路径的仰角为θd,镜面反射的路径为R1、R2,镜面反射路径的仰角为θr,入射余角为ψ,雷达天线架高为hr,目标的高度为ht。
图1 多路径条件下目标测量模型图由图1可得出,直射返回路径与镜面反射路径两者的波程之差δ是:δ=Rd(cosθdcosψ-1) (1)1.2 测角误差采用最常用的单脉冲测角模型对雷达角度测量误差进行分析。
在存在多路径的情况下,直射返回路径与镜面反射路径的和路、差路合成矢量的关系如图2所示,sΣd为直射返回的和路信号,sΔd为直射返回的差路信号,sΣi为直射返回的和路信号,sΔi为直射返回的差路信号,sΣ为2种路径矢量合成后的和路信号,sΔ为2种路径矢量合成后的差路信号。
图2 多路径情况下矢量合成示意图利用和信号sΣ完成归一化处理,差路信号与和路信号的单脉冲幅度比为:sΔsΣ=VΔVΣ⋅1-ρ1+ρ (2)式中:VΔ是差路的接收电压;VΣ是和路的接收电压;ρ为复反射系数,ρ=|ρ|ejϕ,ϕ是直射返回路径与镜面反射路径两者的相位差,结果可由公式(1)波程差δ得出:ϕ=2πλδ≈4πhrhtRdCf (3)多路径条件下的角度测量误差Δθ可由目标仰角θd、复反射系数ρ、相位差ϕ用公式(4)表示:Δθ=θd2|ρ|2+2|ρ|cosϕ|ρ|2+2|ρ|cosϕ+1 (4)2 常用低角跟踪技术目前常用低角跟踪技术主要包括波束锐化、捷变频、偏轴跟踪等技术,这些低角跟踪技术各有优缺点,简单介绍如下。

基于多频点多波束的相控阵雷达天线接收测量方法摘要相控阵雷达天线工作频点多、波束指向角度多,天线的暗室测试工作量大。
传统相控阵雷达天线测试方法采用固定频点固定波束天线测试方法,测试效率低、周期长。
本文提出多频点多波束的相控阵雷达天线接收测量方法可大幅度提高天线测试的速度、缩短天线测试周期。
【关键词】相控阵雷达天线测试多频点多波束相控阵雷达天线接收测试主要进行天线的接收和通道增益、接收和通道波束宽度、接收和通道副瓣水平、接收差通道零深和接收差通道零深零位等指标的校正和测试。
这些指标影响到雷达的威力范围和雷达角度探测的精度,因此进行相控阵雷达天线的校正和测试十分重要。
目前,常用的相控阵雷达天线测试方法是固定波束和固定频点的暗室近场测试方法。
由于相控阵雷达天线波束指向多、工作频点多,采用固定波束和固定频点的暗室近场测试方法测试工作量大、效率比较低。
本文分析固定波束和固定频点的暗室近场天线接收测量方法存在的问题,提出高效的多波束和多频点的暗室近场天线接收测量方法,大幅度提高相控阵雷达天线的暗室近场测试效率。
1 传统相控阵雷达天线接收测量方法目前,相控阵雷达天线接收测试采用单频点单波束近场反演测试方法,测试方案具体如下:相控阵雷达天线阵的和通道和差通道按图1引出来,在雷达接收校正测试模式时,和、差通道的连接开关与雷达系统连接,开展雷达的接收校正;在雷达接收?y试模式时,和、差通道的连接开关与天线测试系统连接,开展雷达的接收暗室测试。
脉冲发生器利用雷达的工作时序调节脉冲信号,作为暗室测试的数据采集同步信号。
假设相控阵雷达工作模式控制时序负脉冲信号的重频为500Hz,脉宽80us,每个波束10个脉冲。
暗室天线测试时,利用脉冲发生器把雷达系统送过来的工作模式时序负脉冲信号转换成正脉冲,展宽和延迟,作为暗室测试系统的采样同步信号。
此外,传统相控阵雷达天线接收测量方法在测试前设置好固定频点和固定波束信息,如图2所示,即可进去接收校正和测试环节。

天线测试方案一、引言天线是无线通信系统中非常重要的组成部分,负责接收和发射无线信号。
为确保天线的性能符合设计要求,需要进行天线测试。
本文将介绍一种天线测试方案,旨在保证测试的准确性和可行性。
二、测试设备为了进行天线测试,需要准备以下设备:1. 天线测试仪:用于测试和评估天线的性能指标,如增益、辐射图案、驻波比等。
2. 信号源:提供测试所需的信号,可以是射频信号源或者其他合适的信号源。
3. 频谱分析仪:用于分析和监测测试过程中的信号频谱特性。
4. 天线控制器:用于对天线进行方向和角度调整,确保能够覆盖测试所需的方向和范围。
三、测试步骤1. 定义测试目标:在进行天线测试之前,需要明确测试目标,包括测试的性能指标、测试场景和测试条件等。
2. 搭建测试环境:在符合测试要求的空间中,设置测试设备并确保各设备之间的连接正常。
3. 校准天线测试仪:在进行天线测试之前,需要对天线测试仪进行校准,以确保测试结果的准确性。
校准可能包括增益校准、角度校准等。
4. 测试天线性能:根据定义的测试目标,通过调整天线的方向和角度,使用天线测试仪进行性能测试。
记录测试结果并进行分析。
5. 评估结果:根据测试结果和定义的性能指标,评估天线的性能是否符合设计要求。
如果不符合,可以尝试根据测试结果进行调整。
6. 完善测试报告:根据测试过程和结果,编写详细的测试报告,包括测试目标、测试环境、测试步骤、测试结果以及评估分析等内容。
四、注意事项1. 使用合适的信号源:根据测试要求选择合适的信号源,并确保信号源的性能稳定和可靠。
2. 确认测试环境:测试环境应符合测试要求,避免有干扰源或阻挡物影响测试结果。
3. 多次测试取平均值:由于天线性能可能受到环境和信号源的影响,建议进行多次测试,并取平均值以提高测试结果的准确性。
4. 定期校准:天线测试仪应定期进行校准,以确保测试结果的准确性和可靠性。
五、总结天线测试是确保无线通信系统正常运行的重要环节,本文介绍了一种天线测试方案。
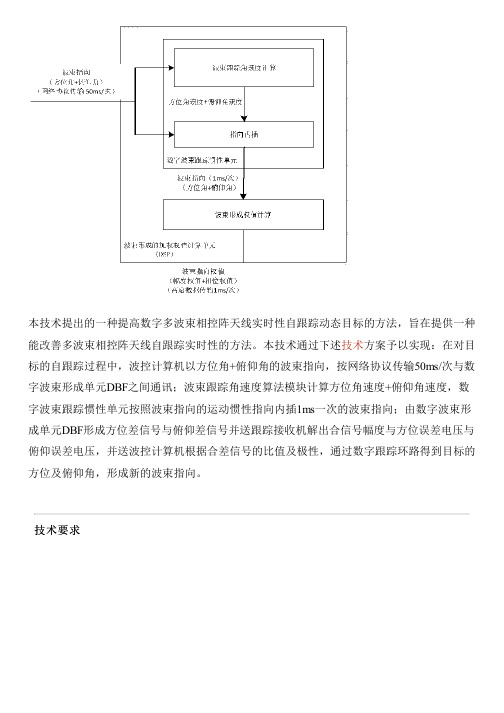
本技术提出的一种提高数字多波束相控阵天线实时性自跟踪动态目标的方法,旨在提供一种能改善多波束相控阵天线自跟踪实时性的方法。
本技术通过下述技术方案予以实现:在对目标的自跟踪过程中,波控计算机以方位角+俯仰角的波束指向,按网络协议传输50ms/次与数字波束形成单元DBF之间通讯;波束跟踪角速度算法模块计算方位角速度+俯仰角速度,数字波束跟踪惯性单元按照波束指向的运动惯性指向内插1ms一次的波束指向;由数字波束形成单元DBF形成方位差信号与俯仰差信号并送跟踪接收机解出合信号幅度与方位误差电压与俯仰误差电压,并送波控计算机根据合差信号的比值及极性,通过数字跟踪环路得到目标的方位及俯仰角,形成新的波束指向。
技术要求1.一种提高数字多波束相控阵天线实时性自跟踪动态目标的方法,其特征在于包括如下步骤:将数字多波束相控阵天线自跟踪系统中的跟踪接收机与波控计算机,以及波控计算机与数字波束形成单元DBF之间通讯数据包的时间间隔保持为50ms不变,在对目标的自跟踪过程中,波控计算机以方位角+俯仰角的波束指向,按网络协议传输50ms/次与数字波束形成单元DBF之间通讯;数字波束形成单元DBF内置波束跟踪角速度算法模块和数字波束跟踪惯性单元,波束跟踪角速度算法模块进行波束跟踪角速度计算方位角速度+俯仰角速度,数字波束跟踪惯性单元按照波束指向的运动惯性指向内插1ms一次的波束指向;在波控计算机控制数字波束合成DBF的两次间隔为50ms的波束指向之间,初级数字波束形成单元DBF利用波束跟踪指向内插算法模块最近两次波束跟踪目标的指向角,计算出目标在方位角以及俯仰角的转动角速度,波束形成权值单元根据该角速度,在初级DBF板块上的数字信号处理器DSP内置波束形成算法中,增加1毫秒一次的波束指向的惯性控制波束指向的刷新率,由50ms一次提高为1ms一次,输出高速数据传输1ms/次波束指向权值。
2.如权利要求1所述的提高数字多波束相控阵天线实时性自跟踪动态目标的方法,其特征在于:数字多波束相控阵天线自跟踪系统包括:向数字波束形成单元DBF提供阵列收/发信号的相控阵天线阵列,相连数字波束形成单元DBF和波控计算机的跟踪接收机,从而组成波控计算机的数字自跟踪环路,并且跟踪接收机与波控计算机以及波控计算机与数字波束形成单元DBF之间通讯是通过网络协议传播的。

多波束相控阵天线角跟踪性能及测试方法姚海涛【摘要】针对目前对多波束相控阵天线角跟踪性能测试研究较少的问题,首先分析了多波束相控阵天线的单脉冲和差测角方法,并对波束滑动、波束穿越及信号频率变化对角跟踪性能的影响进行了仿真分析。
类比传统的雷达精度校飞试验,提出了基于飞艇的角跟踪性能测试方法,对角跟踪精度及误差范围进行测试,并利用STK软件实现了可视化。
仿真分析表明,该方法可以实现对多波束相控阵天线角跟踪性能的评定并具有较高的工程应用价值。
%Aiming at the limited research of measurement of multi-beam phased array antennas’ angle tracking performance,the sum-difference monopulse angle measurement is firstly analyzed and the effects of beam sliding,beam crossing and change of signal frequency are simulated in this paper. Subsequently,compared to conventional radar calibration flight test,a novel measurement based on the airship for tracking performance which can test the tracking accuracy and error range is proposed,and visualization of the measurement is achieved through STK software. Numerical simulations demonstrate that the proposed method can accurately measure the performance of angle tracking and is suitable in engineering practice.【期刊名称】《火力与指挥控制》【年(卷),期】2015(000)004【总页数】6页(P45-50)【关键词】多波束相控阵天线;单脉冲测角;跟踪性能;测试【作者】姚海涛【作者单位】解放军76160部队,广州 510055【正文语种】中文【中图分类】TN82多波束相控阵天线在阵列天线基础上通过对阵列信号的数字加权处理来形成和差波束,如自适应波束形成及子阵级和差多波束[1-6]等,对目标进行单脉冲测角,发现并跟踪尽量多的目标,以实现高跟踪精度、强抗干扰能力及高数据率等优点。
试析相控阵天线测试系统实时校准方法在现代雷达发展方面,主要以相控阵雷达作为主流,这是由它独特的优势所决定,比如对于高速运动目标的观测、将多种雷达功能加以实现或者对多个目标进行跟踪以及在雷达作用距离方面加以推远等。
所谓的相控阵雷达主要还是以多功能电扫描雷达为主,属于新体制型的雷达扫描技术。
从目前来看,它的技术含量依然非常高,而且在资金投入方面占比相当大,而其中比较重要的就是相控阵天线分系统,它是决定该雷达进行系统实施的主要推动因素与实施方案的基础。
1 相控阵天线测试系统1.1 相控阵天线测试技术相控阵天线测试包括天线辐射特性、电路特性两个方面的测试,从测试项目看,主要是方向图、增益。
具体是对方向特性的符合性进行检测,目的在于通过校标使其光轴、电轴、机械轴达到重合。
由于天线辐射场区可以划分为电抗近场、辐射近场、辐射远场,所以有对应于这三个区域的测量技术,比如在近场测量法方面就包括平面近场扫描、柱面近场扫描、球面近场扫描,而在远场测量方面则主要集中于高架场法、斜矩场法、反射场法等。
1.2 系统测试原理、系统框架1.2.1 由于相控阵天线辐射场分布辐射近场区时具有规律性,具体就是伴随距离R不断增加,而造成天线轴向功率密度以1/R2的比例下降,因此就得到了工作频率较低的小口径天线测试远场距离10λ,而工作频率较大的口径天线则可以表示为R/(2D2/λ)>0.5;根据这一下降规律,还可以得到近似于满足远场的条件,R/(2D2/λ)>0.5>1。
1.2.2 中场的测试方面,则是在中场距离范围内利用测试探头,然后进行相应的阵列面单元通道依次选通,以高速、高效的形式完成全阵面测试。
因此按照相关的测试要求与系统功能的设计标准,该测试系统就需要按照矢量网络分析仪、控制计算机、测试探头组件、波控分棉、测试附件等共同构成。
具体的系统构架图如图1所示:1.3 多探头测试技术分析多探头测试技术主要由四部分构成,具体是控制计算机、矢量网络分析仪、相控阵天线、测试探头阵列、测试探头通道。
多波束测量实施方案多波束测量是一种用于测量远距离目标的技术,它通过同时使用多个波束来对目标进行定位和跟踪。
在实际应用中,多波束测量可以用于雷达、通信、声纳等领域,能够提高系统的性能和精度。
本文将介绍多波束测量的实施方案,包括系统架构、信号处理、算法优化等内容。
系统架构。
多波束测量系统的架构包括传感器、信号处理器和控制器等组件。
传感器负责接收目标的信号,并将其转换为电信号;信号处理器则对接收到的信号进行处理和分析,提取目标的特征信息;控制器则负责协调传感器和信号处理器的工作,实现多波束的协同工作。
信号处理。
在多波束测量中,信号处理是至关重要的环节。
传感器接收到的信号可能受到噪声、干扰等影响,因此需要进行滤波、增益控制等处理,以提高信噪比;同时,还需要对接收到的信号进行波束形成和波束跟踪,实现对目标的定位和跟踪。
算法优化。
为了提高多波束测量系统的性能,需要对信号处理算法进行优化。
例如,可以采用自适应波束形成算法,根据目标的特性自动调整波束形成参数,提高系统的灵敏度和抗干扰能力;同时,还可以采用多波束跟踪算法,实现对目标的高精度跟踪。
实施方案。
在实际应用中,多波束测量系统需要根据具体的场景和需求进行定制化设计。
例如,在雷达领域,可以采用相控阵天线实现多波束测量;在通信领域,可以采用多天线系统实现多波束信号接收和处理。
同时,还需要根据目标的特性和环境的影响进行参数调整和优化,以实现系统的最佳性能。
总结。
多波束测量是一种重要的远距离目标测量技术,它在雷达、通信、声纳等领域具有广泛的应用前景。
通过合理的系统架构、信号处理和算法优化,可以实现多波束测量系统的高性能和高精度。
在实际应用中,需要根据具体的场景和需求进行定制化设计和实施,以实现系统的最佳性能和效果。
以上就是关于多波束测量实施方案的介绍,希望能为相关领域的工程师和研究人员提供一些参考和帮助。
多波束测量技术的不断发展和完善,将为远距离目标测量领域带来更多的创新和突破。