R5F100LE控制的四旋翼自主飞行器,含原理图、程序
- 格式:pdf
- 大小:484.84 KB
- 文档页数:16
选题编号:C题全国大学生电子设计竞赛设计报告选题名称:多旋翼自主飞行器主办单位:辽宁省教育厅比赛时间:2015年08月12日08时起2015年08月15日20时止摘要多旋翼飞行器也称为多旋翼直升机,是一种有多个螺旋桨的飞行器。
本设计实现基于ATMEGA328P和R5F100LEA的四旋翼飞行器。
本飞行器由飞行控制模块、导航模块、电源模块和航拍携物模块等四部分组成。
主控模块采用ATMEGA328P芯片,负责飞行姿态控制;导航模块以G13MCU为核心,由陀螺仪、声波测距等几部分构成,该模块经过瑞萨芯片处理采集的数据,用PID控制算法对数据进行处理,同时解算出相应电机需要的PWM增减量,及时调整电机,调整飞行姿态,使飞行器的飞行更加稳定;电源模块负责提供持续稳定电流;航拍携物模块由摄像头、电磁铁等构成,负责完成比赛相应动作。
飞行器测试稳定,实现了飞行器运动速度和转向的精准控制,能够完成航拍,触高报警,携物飞行,空中投递等动作要求。
关键词:四旋翼,PID控制,瑞萨目录摘要................................................................................................................................ i i1.题意分析 (1)2.系统方案 (1)2.1 飞行控制模块方案选择 (1)2.2 飞行数据处理方案选择 (1)2.3 电源模块方案选择 (2)2.4 总体方案描述 (2)3.设计与论证 (2)3.1 飞行控制方法 (2)3.2 PID控制算法 (3)3.3 建模参数计算 (3)3.4 建立坐标轴计算 (4)4.电路设计 (5)4.1 系统组成及原理框图 (5)4.2 系统电路图 (5)5.程序设计 (6)5.1 主程序思路图 (6)5.2 PID算法流程图 (7)5.3 系统软件 (7)6. 测试方案 (7)6.1 硬件测试 (7)6.2 软件仿真测试 (7)6.3 测试条件 (8)6.4 软硬件联调 (8)7.测试结果及分析 (8)7.1 测试结果 (8)7.2 结果分析 (9)8.参考文献 (9)1.题意分析设计并制作一架带航拍功能的多旋翼自主飞行器。
四旋翼飞行器无刷直流电机调速系统的设计孟磊,蒋宏,罗俊,钟疏桐武汉理工大学自动化学院、武汉理工大学信息工程学院摘要,关键字:略近年来,无人机的研究和应用广泛受到各个方面的重视。
四旋翼飞行器作为无人机的一种,能够垂直起落、空中悬停、可适用于各种飞行速度与飞行剖面,具有灵活度高、安全性好的特点,适用于警务监控、新闻摄影、火场指挥、交通管理、地质灾害调查、管线巡航等领域实现空中时时移动监控。
四旋翼飞行器的动力来源是无刷直流电机,因此针对该型无刷直流电机的调速系统对飞行器的性能起着决定性的作用。
为了提高四旋翼飞行器的性能,本文设计制作了飞行试验平台,完成了直流无刷电机无感调速系统的硬件、软件设计。
通过实验证明该系统的设计是可行的。
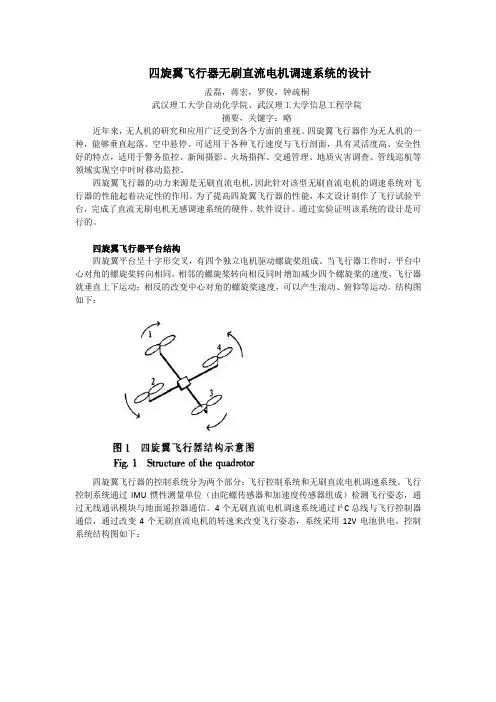
四旋翼飞行器平台结构四旋翼平台呈十字形交叉,有四个独立电机驱动螺旋桨组成。
当飞行器工作时,平台中心对角的螺旋桨转向相同,相邻的螺旋桨转向相反同时增加减少四个螺旋桨的速度,飞行器就垂直上下运动;相反的改变中心对角的螺旋桨速度,可以产生滚动、俯仰等运动。
结构图如下:四旋翼飞行器的控制系统分为两个部分:飞行控制系统和无刷直流电机调速系统。
飞行控制系统通过IMU惯性测量单位(由陀螺传感器和加速度传感器组成)检测飞行姿态,通过无线通讯模块与地面遥控器通信。
4个无刷直流电机调速系统通过I²C总线与飞行控制器通信,通过改变4个无刷直流电机的转速来改变飞行姿态,系统采用12V电池供电。
控制系统结构图如下:无刷直流电机调速系统无刷直流电动机既具有运行效率高、调速性能好,同时又具有交流电动机结构简单、运行可靠、维护方便的优点,是电机主要发展方向之一,现已成功运用与军事、航空、计算机数控机床、机器人、电动自行车等多个领域。
在该四旋翼飞行器上使用了新西达2217外转子式无刷直流电机,其结构为12绕组7对磁极,典型KV值为1400.通常无刷直流电机的控制方式分为有位置传感器控制方式和无位置传感器控制方式。
摘要为了满足四旋翼飞行器的设计要求,设计了以微控制器为核心的控制系统和算法。
首先我们进行了各个单元电路方案的比较论证,确定了硬件设计方案。
飞行器以16位微控制器R5F100LEA作为控制核心。
采用电调将直流转化为交流,驱动无刷直流电机,该电调具有控制简单的特性。
通过超声波测量高度反馈到MCU,控制四旋翼的高度;通过陀螺仪采集飞行器的角度,然后反馈到主控板,运用PID控制算法调整飞行器的姿态。
采用摄像头采集地面信息,实现了飞行器搜寻内沿黑线及指示线等功能;运用互补滤波算法将陀螺仪和加速度计融合起来,更好的控制姿态;实际测试表明,所采用的设计方案先进有效,完全达到了设计要求。
关键词:四旋翼;PID;循迹;超声波;R5F100LEA单片机目录1系统方案的设计与论证 (3)1.1系统总体框架 (3)1.2方案论证与比较 (3)2 理论分析与计算 (5)2.1 四旋翼飞行器动力学原理 (5)2.2 四旋翼飞行器的数学模型 (5)2.3四元数控制算法 (7)2.4姿态控制算法 (7)3系统的硬件电路设计 (9)3.1 系统硬件框图 (9)3.2模块的硬件设计原理图 (9)4飞行器的软件设计 (12)4.1系统程序流程图 (13)4.2互补滤波算法 (14)5测试方法和结论 (15)5.1 测试方案及测试仪器 (16)5.2 测试数据 (16)5.2.1基础部分A到B (16)5.2.2 基础部分B到A (16)5.1.3 发挥部分 (16)5.3 测试结果分析 (17)6小结 (17)参考文献 (17)附录1:电路原理图 (18)附录2:部分源程序清单................................... 错误!未定义书签。
1系统方案的设计与论证1.1系统总体框架根据题目分析,四旋翼飞行器需要在指定的地点飞行和指定的地点停止,由于飞行区域有指示线来为四旋翼飞行器导航,故本设计采用相应循迹模块为飞行器导航,同时采用测距模块测量实时的检测飞行器的高度,以使飞行器通过示高线,同时设计采用常见的姿态调整传感器——陀螺仪和加速度传感器来调整飞行器的飞行姿态,并且使用搬运模块实现飞行器的携带功能,系统框图如图1.1所示。
四旋翼飞行器原理及实现四旋翼飞行器(Quadcopter)是一种通过四个螺旋桨提供推力来实现垂直起降和水平飞行的飞行器。
它具有灵活性高、悬停稳定和机动能力强等特点,因此在航拍、农业喷洒、抢险救援等领域得到广泛应用。
原理四旋翼飞行器的原理基于螺旋桨提供的升力和扭矩。
四个螺旋桨分别固定在飞行器的四个支架上,两个螺旋桨按照同一方向旋转,另外两个按照相反方向旋转。
通过控制每个螺旋桨的转速,可以实现飞行器的上升、下降、向前、向后、向左、向右的运动。
四旋翼飞行器的飞行控制系统通常由飞控模块、传感器(加速度计、陀螺仪、磁力计)、遥控器和电调等部件组成。
飞控模块接收传感器信息和遥控器指令,经过算法计算得出螺旋桨的转速,从而实现对飞行器的控制。
实现材料准备搭建四旋翼飞行器需要准备以下材料: - 四个无刷直流电机 - 四个螺旋桨 - 电调- 飞控模块 - 电池 - 遥控器 - 机架 - 电子速度控制器搭建步骤1.将四个无刷直流电机安装在机架的四个支架上。
2.安装螺旋桨在每个电机上,确保两个螺旋桨按照同一方向旋转,另外两个按照相反方向旋转。
3.连接电调和电机,确保正确连接。
4.将飞控模块安装在机架上,并连接传感器和电调。
5.安装电池和遥控器,确保电路连接正确。
6.完成搭建后,对四旋翼飞行器进行调试和校准。
飞行控制控制四旋翼飞行器飞行的关键在于飞控系统的控制。
通过遥控器发送指令给飞控模块,调整螺旋桨的转速,可以实现飞行器的姿态控制、高度控制和位置控制。
同时,传感器也可以提供飞行器的姿态信息,帮助飞控系统实时调整螺旋桨的转速,保持飞行器的稳定飞行。
结语四旋翼飞行器的原理和实现涉及到力学、电子、控制等多方面的知识,在搭建和飞行过程中需要仔细操作和谨慎调试。
通过不断学习和实践,可以更好地理解四旋翼飞行器的运作原理,实现更加灵活、稳定的飞行。
愿四旋翼飞行器爱好者们在探索飞行器世界的过程中获得乐趣和成长!。
四旋翼速度控制器原理理论说明以及概述1. 引言1.1 概述四旋翼作为一种多旋翼飞行器,在军事、民用和娱乐领域得到了广泛的应用。
速度控制是四旋翼飞行中至关重要的一个方面,它直接影响着飞行器的稳定性和灵活性。
速度控制器作为四旋翼系统中的核心部件之一,对于实现精确、稳定的速度控制起着关键作用。
本文将对四旋翼的速度控制器原理进行详细说明与分析,以帮助读者更好地理解其工作原理与应用。
1.2 文章结构本文共分为五个主要部分:引言、四旋翼基础知识、速度控制器原理、理论说明与分析以及结论。
首先在引言部分,我们将介绍全文的概览和目录结构,让读者对文章内容有一个清晰的认识。
之后,在第二部分会介绍四旋翼的基础知识,包括其结构组成、工作原理和运行特点。
紧接着,在第三部分将详细讲解速度控制器原理,包括控制原理的概述、PID控制器的应用以及其他速度控制方法。
随后,在第四部分将对速度控制器的理论进行说明与分析,包括四旋翼的动力学模型、分析速度对系统的影响以及速度控制参数调整策略。
最后,在第五部分中,我们将对全文进行总结和回顾,并提出进一步研究方向。
1.3 目的本文旨在详细介绍四旋翼飞行器中速度控制器的原理与应用。
通过对引言和各部分内容的讲解,读者可以了解四旋翼基础知识、速度控制器原理以及其理论说明与分析。
同时,本文也旨在帮助读者深入了解四旋翼飞行器中速度控制器工作原理,并为进一步研究和应用提供指导和参考。
通过本文的阅读,读者可以更好地理解和掌握飞行器速度控制技术,推动该领域的发展与创新。
2. 四旋翼基础知识:2.1 结构组成:四旋翼主要由四个相互垂直排列的旋翼、机身以及控制系统组成。
每个旋翼都通过电动机驱动,产生升力和推力。
机身一般采用轻质材料制造,如碳纤维或铝合金,以保证整体结构的稳定性和轻量化。
2.2 原理介绍:四旋翼的原理基于牛顿第三定律:作用力与反作用力大小相等、方向相反。
当旋翼产生升力时,会产生一个向上的推力,将整个飞行器带离地面。
四旋翼自主飞行器(B题)摘要摘要:本设计采用瑞萨公司的R5F100LEA型号单片机为核心处理芯片,控制有刷空心杯电机实现四旋翼的起飞和转向。
四旋翼在飞行区域上空自主行驶,通过MPU6050获得其飞行姿态,通过超声波模块测离地高度,用线性CCD采集下方路径信息从而获得航向。
四旋翼缓慢起飞后,首先悬停一会,然后沿着黑线往返AB之间,当偏航时,通过PWM和PID算法调整4个电机的转速以纠正飞机姿态和航向。
另外,采用一个5V继电器控制薄铁片的吸合和释放,完成空投。
为了安全和控制方便,我们调试了无线模块,实现远程一键启动。
AbstractThis design uses the R5F100LEA Renesas microcontroller as the core processing chip model, controlling brush coreless motor to achieve four rotor takeoff and steering. four-rotor aircraft flys over the regional travel automaticly, gets the flight attitude by MPU6050,ground clearance measured by ultrasonic module, using a linear CCD acquisition below the path information to obtain heading. Four-rotor aircraft takes off slowly and hovers for a moment firstly, then flys back and forth along the black line between AB, when the yaw, through the PWM and PID algorithm to adjust four motor speed to correct the aircraft attitude and heading. In addition, we use a 5V relay control thin sheet iron absorption and release, complete airdrop. For safe and easy to control, we debug the wireless module, then we can use only one key to take off four-rotor aircraft remotely..一、系统方案与论证1、平衡传感器的选择方案1:采用六轴传感器MPU6050进行处理,MPU6050集成3轴加速度计和3轴陀螺仪,能采取飞行器X轴、Y轴、Z轴3个方向的数据,进行姿态判断。
摘要本文对四桨碟形飞行器进行了初步的研究和设计。
首先,对飞行器各旋翼的升力做了测试,分析了升力产生效率与PWM频率的关系并选择了此样机的最优工作频率,并重点对飞行器进行了硬件和软件的设计。
本飞行器采用R5F100LE单片机为主控制器,通过四元数算法处理传感器MPU6050采集机身平衡信息并进行闭环的PID控制来保持机身的平衡。
整个控制系统包括电源模块、角度传感器模块、电子调速模块、超声波测距模块及微处理器模块等。
角度传感器和角速率传感模块为整个系统提供飞行器当前姿态和角速率信号,构成飞行器的增稳系统。
本系统经过飞行测试,可以达到设计要求。
关键字:R5F100LE单片机、角度传感、PWM频率、PID控制。
目录1系统方案 (2)1.1 电子调速模块的选择 (2)1.2角度传感模块的论证与选择 (2)1.3 超声波测距的选择 (3)1.4 电源的论证与选择 (3)2系统理论分析与计算 (3)2.1 控制理论的分析 (3)2.1.1控制方式 (3)2.1.2 PID算法 (4)2.1.3 PID计算 (4)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1系统总体框图 (4)3.1.2 电机驱动电路 (5)3.1.3 HC-SR04子系统电路 (6)3.1.4电源 (6)3.2程序的设计 (6)3.2.1程序功能描述 (6)3.2.2主程序流程图 (6)4测试方案与测试结果 (7)4.1测试方案 (7)4.2 测试条件与仪器 (10)4.3 测试结果及分析 (10)4.3.1测试结果(数据) (11)4.3.2测试分析与结论 (11)附录1:电路原理图 (12)附录2:源程序 (14)四旋翼自主飞行器()1系统方案本系统主要由电子调速模块、角度传感模块、超声波测距模块、电源模块组成,下面分别论证这几个模块的选择。
1.1 电子调速模块的选择由于飞行器需要强大的动力,普通的电机不适合飞行器的开发,无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。
2013全国电子设计大赛瑞萨杯2013年全国大学生电子设计竞赛四旋翼自主飞行器(B题)【XX组】2013年9月6日目录1系统方案..................................... 错误!未定义书签。
1.1平衡传感器的论证与选择............ 错误!未定义书签。
1.2 巡线方案的论证与选择.............. 错误!未定义书签。
1.3停机坪寻找方案的论证与选择 (1)1.4控制系统的论证与选择.............. 错误!未定义书签。
2系统理论分析与计算.. (4)2.1 控制理论的分析 (4)2.1.1 四元数与欧拉角的理论计算 (4)2.1.2控制方式 (5)2.1.2 对PID的分析 (5)2.2节能论证 (6)2.2.1电源的选择 (6)3电路与程序设计 (7)3.1电路的设计 (7)3.1.1R5F100LEA 芯片引脚图 (7)3.1.2电机驱动电路 (8)3.1.3 传感器电路原理图 (9)3.2程序的设计 (9)3.2.1程序功能描述与设计思路 (9)3.2.2程序流程图 (10)4测试方案与测试结果 (12)4.1测试方案 (12)4.2 测试条件与仪器 (12)4.3 测试结果及分析 (12)4.3.1测试结果(数据) (12) (12)4.3.2测试分析与结论 (12)附录:源程序 (13)摘要四轴飞行器为成品改造玩具四轴航模,采用瑞萨公司的R5F100LEA型号单片机产生PWM通过驱动电路来驱动四个无心杯电机的转动产生一个向上的力,通过四元数算法处理传感器MPU6050采集的机身平衡信息并进行闭环的PID控制来保持机身的平衡。
通过激光收发来采集赛道信息来进行飞行器的循迹。
通过采集停机坪的信息进行降落。
经测试,系统基本可以完成题目要求。
关键字:四周飞行器R5F100LEA 四元数算法PID控制AbstractThe model aircraft Been modified by Four aircraft toys axis ,use of Renesas microcontroller to generate the PWM, R5F100LEA model through the drive circuit to drive four cups unintentional rotation of the motor produces an upward force, through the quaternion algorithm processing six-axis sensor MPU6050 collection balance information of the body and closed-loop PID control to maintain the body balance. Track by linear CCD to capture the tracking information for the aircraft. On the tube on then\tube through the infrared the information collected After testing, the system can be completed subject requirements.Keywords: four weeks Aircraft R5F100LEA Quaternions PID control algorithm1 系统方案本系统主要由中央处理单元,巡线模块,平衡控制单元,电机驱动模块,电源模块,停机坪信息采集单元组成。
摘要飞行器选用瑞萨R5F100LEA单片机作为主控芯片,对从MWC SE v2.5飞控板中的传感器读取到的一系列数据,进行PID算法处理并给飞行器的电调给出相应指令从而达到对飞行器的飞行姿态的控制。
采用MWC SE v2.5飞控板中的传感器采集四旋翼飞行器的三轴角速度和三轴角加速度数据。
同时用COMS 摄像头传感器来检测出黑色指示线,以保证飞行器不脱离指定飞行区域及达到指定圆形区域。
利用超声波传感器来检测飞行器与地面的距离,从而保证飞行器能越过一米示高线。
最后利用电磁铁来吸取和投放铁片。
关键词:瑞萨R5F100LEA单片机SE v2.5飞控板超声波测距PID算法一. 系统方案本系统主要由控制模块、薄铁片拾取、高度测量模块、电机调速模块、循迹模块、角速度和角加速度模块组成,下面分别论证这几个模块的选择。
1.控制系统的选择依据本题目的要求,本系统选用组委会提供的瑞萨的R5F100LEA单片机作为主控芯片,通过采用单边PWM的控制方式实现电机的调速来控制飞行器的飞行姿态与方向。
2.驱动模块的选择通过综合考虑飞行器载重能力,起飞高度,平稳性等因素,采用无刷电机和电调为飞行器的驱动模块。
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
由于无刷直流电动机是以自控式运行的,不会在变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
其优点是无电刷、低干扰、噪音低、运转顺畅、寿命长、低维护成本。
通常用在控制要求比较高,转速比较高的设备上,如航模、精密仪器仪表等对电机转速控制严格,转速达到很高的设备上。
3.测高模块的论证与选择方案一:采用bmp085气压传感器测量大气压并转换为海拔高度,把当前的喊吧测量值减去起飞时的海拔值即得飞机的离地高度。
但芯片价格较贵,误差较大,而且对芯片并不熟悉。
方案二:采用HC-SR04超声波传感器测量飞行器当前的高度。
HC-SR04超声波传感器可测量范围为:2cm-400cm,精度可达0.3cm,感应角度不大于15度。
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图 1.1所示。
2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机 1的转速上升,电机 3 的转速下降(改变量大小应相等),电机 2、电机 4 的转速保持不变。
由于旋翼1 的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转,同理,当电机 1 的转速下降,电机 3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图 b 的原理相同,在图 c 中,改变电机 2和电机 4的转速,保持电机1和电机 3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
四旋翼飞行器飞行控制技术综述随着科技的不断发展,无人机已经成为了现代社会中不可或缺的一部分。
其中四旋翼飞行器是无人机中的一种常见类型,它具有简单的结构、灵活的机动性和广泛的应用领域。
在四旋翼飞行器的飞行过程中,飞行控制技术起着至关重要的作用,它直接影响着飞行器的稳定性、精准度和安全性。
本文将就四旋翼飞行器飞行控制技术进行综述,包括其基本原理、控制方法和发展趋势。
一、四旋翼飞行器的基本原理四旋翼飞行器由四个对称分布的螺旋桨组成,其工作原理类似于直升机。
螺旋桨通过变化其转速来产生升力和推力,从而使飞行器在空中进行飞行。
四旋翼飞行器的飞行控制主要通过调节螺旋桨的转速来实现。
当需要向上升时,四个螺旋桨的转速均增加;当需要下降时,四个螺旋桨的转速均减小;当需要向前飞行时,前两个螺旋桨的转速增加,后两个螺旋桨的转速减小;当需要向后飞行时,前两个螺旋桨的转速减小,后两个螺旋桨的转速增加。
通过这种方式,四旋翼飞行器可以在空中实现上升、下降、前进、后退、转向等各种飞行动作。
二、四旋翼飞行器的飞行控制方法1. 自稳定控制自稳定控制是四旋翼飞行器最基本的飞行控制方法。
它通过激活飞行器中的陀螺仪、加速度计、磁力计等传感器,实时监测飞行器的姿态和运动状态,然后通过控制飞行器的电机来调整其姿态,使其保持水平飞行、平稳悬停等动作。
这种控制方法简单直观,适用于日常飞行和初学者操作。
2. 遥控手柄控制遥控手柄控制是四旋翼飞行器常见的操控方式。
通过遥控器上的摇杆、按钮等控制装置,飞行员可以实时操控飞行器的姿态、速度和高度。
这种控制方法需要飞行员有一定的飞行经验和操作技巧,适用于比较复杂的飞行任务和专业的飞行员。
3. 自动驾驶控制随着人工智能和自动控制技术的不断发展,自动驾驶控制已经成为了四旋翼飞行器的新趋势。
通过预先设置飞行路径、目标点和航线,飞行器可以自主实现起飞、飞行、巡航、降落等任务,大大提高了飞行的精准度和安全性。
这种控制方法适用于无人机自主飞行、航拍、物流运输等领域。