PQ分解潮流算法简介(课堂PPT)
- 格式:ppt
- 大小:468.50 KB
- 文档页数:5
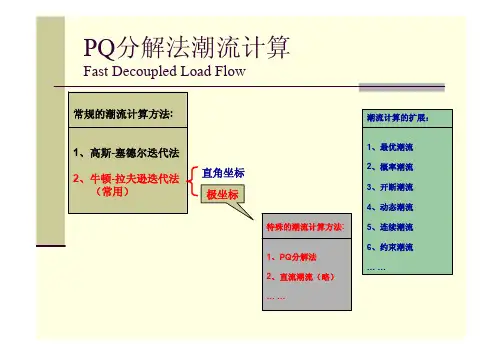
4 P-Q 分解法潮流计算 4.1P-Q 分解法的基本原理P-Q 分解法是从简化一极坐标表示的牛顿-拉夫逊法潮流修正方程基础上派生出来的,考虑到了电力系统本身的特点。
牛顿法潮流计算的核心是求解修正方程式。
当节点功率方程式采用极坐标系统时,修正方程式为[∆P ∆Q ]=[H N J L ][∆δ∆U/U ] (4.1)将其展开为{∆P =H∆δ+N(∆U/U)∆Q =J∆δ+L(∆U/U)(4.2) 对修正方程式的第一步简化是:计及电力网络中各元件的电抗远大于电阻,以致各节点电压相位角的改变主要影响各元件中的有功功率及各节点的注入有功功率;各节点电压大小的改变主要影响元件中的无功功率以及各节点的注入无功功率;式(4.2)中子阵N 及J 中各元素的数值相对很小,因此可以略去,从而将式(4.2)简化为 {∆P =H∆δ∆Q =L(∆U/U)(4.3) 但是,H 、L 中的元素是电压的函数,在每次迭代中都要重新形成上述H 、L 矩阵,并且又都是不对称矩阵,仍然相当麻烦。
对修正方程式的第二步简化是:由于有对状态变量δi 的约束条件|δi −δj |<|δi −δj |max,即线路两端电压的相角差是不大的,再计及G ij ≪B ij ,可以认为cos δij ≈1 G ij sin δij ≪B ij 于是,H ij 和L ij 的表达式H ij =∂∆P i∂δj=−U i U j (G ij sin δij −B ij cos δij ) i ≠j L ij =∂∆Q i∂U j U j=−U i U j (G ij sin δij −B ij cos δij ) i ≠j 可简化为H ij =U i U j B ij L ij =U i U j B ij (4.4) 再由式H ii =U i 2B ii +Q i (当i =j ,sin δij ≈0,cos δij ≈1时) (4.5) L ii =∂∆Q i ∂U iU i =−U i ∑U j (G ij sin δij −B ij cos δij )+2U i 2B ii =U i 2B ii −Q i j=nj=1j≠i(4.6)按自导纳的定义,上两式中的U i 2B ii 项应为各元件电抗远大于电阻的前提下除节点i 外其他节点都接地时由节点i 注入的无功功率。

pq分解法matpowerpq分解法是一种常用的数学方法,用于将矩阵分解为P和Q两个矩阵的乘积,可以用于解决一些实际问题。
在电力系统中,pq分解法被广泛应用于电力流计算,是一种求解电力系统潮流问题的有效方法。
在电力系统中,电力流计算是一项重要的任务,用于分析电力系统中各个节点的电压和功率。
而pq分解法则是电力流计算中常用的一种方法。
它将电力系统的节点分为P节点和Q节点,然后通过分解矩阵,将电力流计算问题转化为P和Q两个矩阵的乘积问题。
具体而言,pq分解法将电力系统的节点分为两类:P节点和Q节点。
P节点表示有功功率已知的节点,Q节点表示无功功率已知的节点。
通过将电力系统的节点分为P节点和Q节点,可以将电力系统的潮流计算问题转化为P和Q两个矩阵的乘积问题。
在进行pq分解法时,首先需要将电力系统的节点按照P节点和Q节点进行分类,并确定P节点和Q节点的数量。
然后,根据电力系统的拓扑结构和节点的电压相位角,可以建立节点电压和节点功率之间的关系。
根据这些关系,可以将电力系统的潮流计算问题转化为P和Q两个矩阵的乘积问题。
通过pq分解法,可以快速有效地求解电力系统的潮流计算问题。
与传统的高斯消元法相比,pq分解法具有计算速度快、适用范围广等优势。
因此,它被广泛应用于电力系统的潮流计算中。
除了在电力系统中的应用,pq分解法还可以用于其他领域的问题求解。
例如,在通信系统中,可以将通信信道的传输过程分解为P和Q两个矩阵的乘积问题,通过求解这个问题可以得到通信信道的传输特性。
在图像处理领域,可以将图像的处理过程分解为P和Q两个矩阵的乘积问题,通过求解这个问题可以得到图像的处理结果。
pq分解法是一种常用的数学方法,可以将矩阵分解为P和Q两个矩阵的乘积,用于解决一些实际问题。
在电力系统中的应用是最为广泛的,pq分解法可以用于解决电力系统的潮流计算问题,具有计算速度快、适用范围广等优势。
此外,pq分解法还可以应用于通信系统、图像处理等领域的问题求解中。

电力系统潮流分析与计算设计(P Q分解法)电力系统潮流分析与计算设计(p-q分解法)摘要潮流排序就是研究电力系统的一种最基本和最重要的排序。
最初,电力系统潮流排序就是通过人工手算的,后来为了适应环境电力系统日益发展的须要,使用了交流排序台。
随着电子数字计算机的发生,1956年ward等人基本建设了实际可取的计算机潮流排序程序。
这样,就为日趋繁杂的大规模电力系统提供更多了极其有力的排序手段。
经过几十年的时间,电力系统潮流排序已经发展得十分明朗。
潮流排序就是研究电力系统稳态运转情况的一种排序,就是根据取值的运转条件及系统接线情况确认整个电力系统各个部分的运转状态,例如各母线的电压、各元件中穿过的功率、系统的功率损耗等等。
电力系统潮流排序就是排序系统动态平衡和静态平衡的基础。
在电力系统规划设计和现有电力系统运转方式的研究中,都须要利用电力系统潮流排序去定量的比较供电方案或运转方式的合理性、可靠性和经济性。
电力系统潮流计算分为离线计算和在线计算,离线计算主要用于系统规划设计、安排系统的运行方式,在线计算则用于运行中系统的实时监测和实时控制。
两种计算的原理在本质上是相同的。
实际电力系统的潮流技术主要使用pq水解法。
1974年,由scottb.在文献(@)中首次提出pq分解法,也叫快速解耦法(fastdecoupledloadflow,简写为fdlf)。
本设计就是使用pq水解法排序电力系统潮流的。
关键词:电力系统潮流排序pq水解法第一章概论1.1详述电力系统潮流计算是研究电力系统稳态运行情况的一种计算,它是根据给定的运行条件及系统接线情况确定整个电力系统各个部分的运行状态,如各母线的电压、各元件中流过的功率、系统的功率损耗等等。
电力系统潮流计算是计算系统动态稳定和静态稳定的基础。
在电力系统规划设计和现有电力系统运行方式的研究中,都需要利用电力系统潮流计算来定量的比较供电方案或运行方式的合理性、可靠性和经济性。
4 P-Q 分解法潮流计算 4.1P-Q 分解法的基本原理P-Q 分解法是从简化一极坐标表示的牛顿-拉夫逊法潮流修正方程基础上派生出来的,考虑到了电力系统本身的特点。
牛顿法潮流计算的核心是求解修正方程式。
当节点功率方程式采用极坐标系统时,修正方程式为[∆P ∆Q ]=[H N J L ][∆δ∆U/U ] (4.1)将其展开为{∆P =H∆δ+N(∆U/U)∆Q =J∆δ+L(∆U/U)(4.2) 对修正方程式的第一步简化是:计及电力网络中各元件的电抗远大于电阻,以致各节点电压相位角的改变主要影响各元件中的有功功率及各节点的注入有功功率;各节点电压大小的改变主要影响元件中的无功功率以及各节点的注入无功功率;式(4.2)中子阵N 及J 中各元素的数值相对很小,因此可以略去,从而将式(4.2)简化为 {∆P =H∆δ∆Q =L(∆U/U)(4.3) 但是,H 、L 中的元素是电压的函数,在每次迭代中都要重新形成上述H 、L 矩阵,并且又都是不对称矩阵,仍然相当麻烦。
对修正方程式的第二步简化是:由于有对状态变量δi 的约束条件|δi −δj |<|δi −δj |max,即线路两端电压的相角差是不大的,再计及G ij ≪B ij ,可以认为cos δij ≈1 G ij sin δij ≪B ij 于是,H ij 和L ij 的表达式H ij =∂∆P i∂δj=−U i U j (G ij sin δij −B ij cos δij ) i ≠j L ij =∂∆Q i∂U j U j=−U i U j (G ij sin δij −B ij cos δij ) i ≠j 可简化为H ij =U i U j B ij L ij =U i U j B ij (4.4) 再由式H ii =U i 2B ii +Q i (当i =j ,sin δij ≈0,cos δij ≈1时) (4.5) L ii =∂∆Q i ∂U iU i =−U i ∑U j (G ij sin δij −B ij cos δij )+2U i 2B ii =U i 2B ii −Q i j=nj=1j≠i(4.6)按自导纳的定义,上两式中的U i 2B ii 项应为各元件电抗远大于电阻的前提下除节点i 外其他节点都接地时由节点i 注入的无功功率。
潮流计算的快速分解法课件潮流计算是电力系统运行中的重要工具,用于分析电力系统中各节点的电压、功率等参数。
而快速分解法是一种常用的潮流计算方法,通过对电力系统进行分解,可以大大提高计算效率。
本课件将介绍潮流计算的基本原理和快速分解法的具体步骤,帮助学生深入理解和掌握这一重要的电力系统分析技术。
一、潮流计算的基本原理潮流计算是基于电力系统的潮流方程进行求解的,潮流方程描述了电力系统中各节点的电压和功率之间的关系。
潮流计算的基本原理是通过迭代求解潮流方程,使得方程的误差最小化,从而得到电力系统的稳态工作状态。
二、快速分解法的基本思想快速分解法是一种将复杂的电力系统分解为若干个简化的子系统进行计算的方法。
其基本思想是利用电力系统的特性和拓扑结构,将复杂的潮流计算问题分解为多个简化的子问题,然后通过迭代求解这些子问题,最终得到整个电力系统的潮流计算结果。
三、快速分解法的具体步骤1. 确定电力系统的拓扑结构:根据电力系统的线路连接关系,确定电力系统的拓扑结构,包括节点、支路和变压器等元件的连接关系。
2. 划分子系统:根据电力系统的拓扑结构和特性,将电力系统划分为若干个子系统。
划分子系统的原则是使得每个子系统的节点数尽可能少,但保证子系统之间有足够的连接。
3. 确定子系统的边界节点:对于每个子系统,确定其边界节点,即与其他子系统相连的节点。
边界节点是子系统与其他子系统之间数据交换的接口。
4. 进行子系统计算:对于每个子系统,利用潮流方程进行计算。
在计算过程中,边界节点的电压和功率需要通过与其他子系统的数据交换来更新。
5. 迭代求解子系统:根据边界节点的电压和功率更新,对于每个子系统进行迭代求解,直到达到收敛条件。
6. 整合子系统计算结果:将各个子系统的计算结果整合起来,得到整个电力系统的潮流计算结果。
四、快速分解法的优缺点快速分解法作为一种高效的潮流计算方法,具有以下优点:1. 计算效率高:通过将电力系统分解为多个子系统进行计算,大大提高了计算效率,减少了计算时间。
clear;clcn=5;%节点个数nl=5;%支路条数max1=100;%最大迭代次数pr=0.00001;%精度Z=[1 2 0.04+0.25j 0.25j 0.25j 0;1 3 0.1+0.35j 0 0 0;2 3 0.08+0.3j 0.25j 0.25j 0;2 4 1.05 0.015j 0 13 5 1.05 0.03j 0 1];%由支路参数形成的矩阵Z=[节点号1 节点号2 支路阻抗靠近节点1的对地导纳靠近节点2的对地导纳参数]'); 参数的详细资料请查阅本程序附带的文本。
Z1=zeros(n);A=[-1.6-0.8j 1 1;-2-1j 1 1;-3.7-1.3j 1 1;5 1.05 2;0 1.05 3];%节点的功率,电压矩阵 A=[节点输入功率节点电压节点类型(PQ节点的节点类型是1;PV:2;平衡节点:3)]%PQ节点的电压初值设为1;平衡节点的功率S初值设为0YZ=[0.25,0.515,0.28,0,0];for i=1:np=Z(i,1);q=Z(i,2);Z1(p,q)=Z(i,3);Z1(q,p)=Z1(p,q);endfor i=1:nlif Z(i,6)==1K=Z(i,3);Zt=Z(i,4);Z(i,3)=K*Zt;Z(i,4)=(1-K)/(K^2*Zt);Z(i,5)=(K-1)/(K*Zt);elseif Z(i,6)==2K=Z(i,3);Zt=Z(i,4);Z(i,3)=Zt/K;Z(i,4)=K*(K-1)/Zt;Z(i,5)=(1-K)/Zt;elseif Z(i,6)==3Zt=Z(i,3);K=Z(i,4);Z(i,3)=K*Zt;Z(i,4)=(K-1)/(K*Zt);Z(i,5)=(1-K)/(K^2*Zt);elseif Z(i,6)==4Zt=Z(i,3);K=Z(i,4);Z(i,3)=Zt/K;Z(i,4)=(1-K)/Zt;Z(i,5)=K*(K-1)/Zt;elseendend%对含有变压器的支路进行处理,详见本程序附带的文本。
一、PQ 分解法的原理P-Q 分解法是牛顿-拉夫逊法潮流计算的一种简化方法。
P-Q 分解法利用了电力系统的一些特有的运行特性,对牛顿-拉夫逊法做了简化,以改进和提高计算速度。
的基本思想是根据电力系统实际运行特点:通常网络上的电抗远大于电阻,则系统母线电压幅值的微小变化对用功功率的改变影响很小。
同样,母线电压相角的的改变对无功功率的影响较小。
因此,节点功率方程在用极坐标形式表示时。
它的修正方程式可简化为:00P H Q L U U θ∆∆⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥∆∆⎣⎦⎣⎦⎣⎦将P 、Q 分开来迭代计算,因此大大地减少了计算工作量。
但是H 、L 在迭代过程中仍将不断变化,而且又都是不对称矩阵。
对牛顿法的进一步简化。
为把上式中的系数矩阵简化成迭代过程中不变的对称矩阵。
在一般情况下线路两端的电压相角ij θ是不大的,因此可以认为:cos 1sin ij ij ijijG B θθ≈2ii ii Q U B考虑到上述关系,可以得到:ij i ij j ij i ij jH U B U L U B U ==节点的功率增量为:11(cos sin )(sin cos )ni is i j ij ij ij ij j ni is i j ij ij ij ij j P P U U G B Q Q U U G B θθθθ==∆=-+∆=--∑∑P-Q 分解法的特点:以一个n-1阶和一个n-m-1阶线性方程组代替原有的2n-m-1阶线性方程组;修正方程的系数矩阵B’和B”为对称常数矩阵,且在迭代过程中保持不变;P-Q 分解法具有线性收敛特性,与牛顿-拉夫逊法相比,当收敛到同样的精度时需要的迭代次数较多。
二、程序说明1.数据说明Branch1.txt:支路参数矩阵第1列为支路的首端编号;第2列为支路的末端编号(首端编号小于末端编号);第3列为之路的阻抗;第4为支路的对地容抗;第5列为支路的变比;第6列为折算到那一侧的标志Branch2.txt:节点参数矩阵第1列为节点所接发电机的功率;第2列为节点负荷的功率;第3列为节点电压的初始值;第4列为PV节点的电压V给定值;第5列为节点所接的无功补偿设备的容量;第6列为节点分类标号igl,其中igl=1为平衡节点,igl=2为PQ节点,igl=3为PV节点。
第四节 PQ 分解法潮流计算一 、PQ 分解法的基本方程式60年代以来N —R 法曾经是潮流计算中应用比较普遍的方法,但随着网络规模的扩大(从计算几十个节点增加到几百个甚至上千个节点)以及计算机从离线计算向在线计算的发展,N —R 法在内存需要量及计算速度方面越来越不 适应要求。
70年代中期出现的快速分解法比较成功的解决了上述问题,使潮流计算在N —R 法的基础上向前迈进了一大步,成为取代N —R 法的算法之一。
快速分解法(又称P —Q 分解法)是从简化牛顿法极坐标形式计算潮流程序的基础上提出来的。
它的基本思想是根据电力系统实际运行特点:通常网络上的电抗远大于电阻值 ,则系统母线电压副值的微小变化V ∆对母线有功功率的改变P ∆影响很小。
同样,母线电压相角的少许改变θ∆,也不会引起母线无功功率的明显改变Q ∆。
因此,节点功率方程在用极坐标形式表示时,它的修正方程式可简化为:⎥⎦⎤⎢⎣⎡∆∆⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡∆∆V V L H Q P /00θ (4—19) 这就是把2(n —1)阶的线性方程组变成了两个n —1阶的线性方程组,将P 和Q 分开来进行迭代计算,因而大大地减少了计算工作量。
但是,H ,L 在迭代过程中仍然在不断的变化,而且又都是不对称的矩阵。
对牛顿法的进一步简化(也是最关键的一步),即把(4—19)中的系数矩阵简化为在迭代过程中不变的对称矩阵。
在一般情况下,线路两端电压的相角ij θ是不大的(不超过10○~20○)。
因此,可以认为:⎭⎬⎫<<≈ij ij ij ij B G θθsin 1cos (4—20)此外,与系统各节点无功功率相应的导纳B LDi 远远小于该节点自导纳的虚部,即 ii iiLDi B V Q B <<=2 因而 ii i i B V Q 2<< (4—21) 考虑到以上关系,式(4—19)的系数矩阵中的各元素可表示为: ij j i ij B V V H = (i,j=1,2,………,n-1) (4—22)ij j i ij B V V L = (i,j=1,2,……………,m ) (4—23)而系数矩阵H 和L 则可以分别写成:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=------------11,1122,1111,1111,222222121211,1121211111n n n n n n n n n n n n V B V V B V V B V V B V V B V V B V V B V V B V V B V H =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------1211,12,11,11,222211,11211121n n n n n n n n V V V B B B B B B B B B V V V =11D D BV V (4—24)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=m mm m m m m m m m m m m V B V V B V V B V V B V V B V V B V V B V V B V V B V L 22122222212121121211111 =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡m mm m m m m m V V V B B B B B B B B B V V V2121222211121121=22''D D V B V (4—25) 将(4—24)和(4—25)式代入(4—19)中,得到[][][][][]θ∆'-=∆11D D V B V P[][][][]V B V Q D ∆-=∆''2用[]11-D V 和[]12-D V 分别左乘以上两式便得:[][][][][]θ∆-=∆-111'D D V B P V (4—26)[][][][]V B Q V D ∆-=∆-''12 (4—27)这就是简化了的修正方程式,它们也可展开写成:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆∆∆----------1122111,12,11,11,222211,11211112211n n n n n n n n n n V V V B B B B B B B B B V P V P V P θθθ(4—28)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆∆∆m mm m m m m m mV V V B B B B B B B B B V Q V Q V Q 212122221112112211 (4—29) 在这两个修正方程式中系数矩阵元素就是系统导纳矩阵的虚部,因而系数矩阵是对称矩阵,且在迭代过程中保持不变。