机器人现场编程-机器人运动奇异点的产生与处理方法
- 格式:pptx
- 大小:256.11 KB
- 文档页数:8

奇异值分解优化数学处理方法,结合给定工业机器人5点奇异值分解优化数学处理方法,结合给定工业机器人5点工业机器人是当今工业自动化和服务自动化过程中最重要和最有效的分量,特别是它在执行同一时间准确程度、重复性和安全性操作方面发挥着重要作用。
近来,许多研究者和机器人开发者都在尝试开发解决工业机器人和工业生产过程中的技术问题,其中奇异值分解优化(SVDO)数学处理方法则是最有效的解决方案之一。
奇异值分解优化(SVDO)数学处理方法是一种特殊的矩阵运算算法。
它可以将任意大小的非奇异矩阵分解为三个长条矩阵,分别代表该矩阵的U,Sig和V轴。
此外,在应用SVDO处理方法时,可以从给定的七个参数中获得最优解。
在工业机器人应用中,SVDO数学处理方法被广泛用于确定执行同一动作的最优机械结构。
例如,考虑一种工业机器人,其具备5个点:θ1,θ2,θ3,θ4和θ5。
给定一个给定的功能,通过应用奇异值分解优化(SVDO)数学处理方法,可以确定每个这五个点应该被移动到的具体位置,从而实现机器人最优运动控制。
首先,可以将所有的五个点的参数输入到SVDO数学处理方法中,并给出7个参数,这使得它可以更快更准确地分析得到最佳结果,其参数如下:θ1,θ2,θ3,θ4,θ5,null space距离和特定的旋转角度。
然后,SVDO数学处理方法将根据这7个参数计算最优解,从而确定每个点应该被移动到的具体位置。
此外,应用SVDO数学处理方法还可以有效解决其他工业机器人技术问题,包括精确运动控制、可重复性提高、机器人参数优化和动态稳定性扩展等。
上述应用的方法涉及的原理和实例同时也可以用于工业机器人任务编程、工业机器人机械优化和机器人控制系统开发等方面。
由于SVDO数学处理方法具有快速准确、运算简便以及结果相对可靠等优点,因此它是目前工业机器人中最有效和最受欢迎的解决方案之一。
本文在前面提出了,当一种工业机。

关于matering的相关报警及处理方法1.pluse mismatch(A:*;G:*)出现该报警的原因为脉冲编码器内数据与机器人控制器内数据不一致.以下为几种可能产生该报警情况:一)机器人关机后由于外力作用是机器人某些轴移动,开机后该轴会产生该报警.二)将不是当前机器人的mastering数据文件导入当前机器人中.三)将机器人机械部分连接到其他控制器上.四)其它未知原因.对于第一种情况,即控制器内Mastering数据正确的前题下,更改系统变量$MCR.$SPC_RESET FLASE----TRUE-----FLASE$DMR_GRP.$MASTER_DONE FLASE----TRUEPOWER Off/ON对于后面两只情况,由于控制器内mastering数据改变,需要重新输入正确的mastering数据(可以参照Data Sheet),然后再更改系统变量.如果没有正确的mastering数据,则需要Zero Position Master来完成.2.Bzal Alarm(A:*;G:*)产生此报警的原因为编码器内SRAM数据丢失.以下为可能产生此报警的情况一)机器人机械部电池掉电;二)连接编码器电缆拔出.处理方法:进入Master/Cal画面,按下RES_PCA,清除报警.Power Off/ON开机后出现pulse not established(A:*;G:*)3. pulse not established(A:*;G:*)产生此报警原因为编码器SDRAM数据丢失后,编码器零位脉冲没有建立.处理方法:将该轴运动,角度大于20°,脉冲计数大于53000,使编码器能够建立零位脉冲.此时需要作单轴或者Zero Position Mastering,对于该轴原来的Mastering Data已经没有意义.。
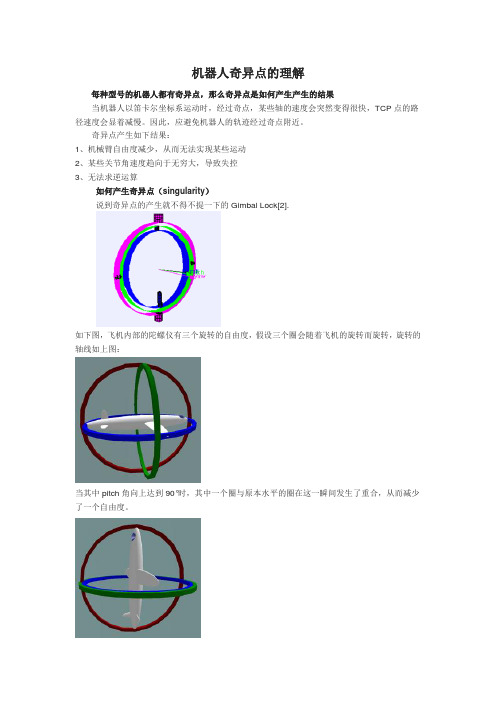
机器人奇异点的理解每种型号的机器人都有奇异点,那么奇异点是如何产生产生的结果当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显着减慢。
因此,应避免机器人的轨迹经过奇点附近。
奇异点产生如下结果:1、机械臂自由度减少,从而无法实现某些运动2、某些关节角速度趋向于无穷大,导致失控3、无法求逆运算如何产生奇异点(singularity)说到奇异点的产生就不得不提一下的Gimbal Lock[2].如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:当其中pitch角向上达到90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度。
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
1、腕部奇点发生在4轴和6轴重合(平行)时。
2、肩部奇点发生在腕部中心位于1轴旋转中心线时。
3、肘部奇点发生在腕部中心和2轴3轴一条线。
4轴和6轴产生奇异点(wrist singularity)下图中的六轴机器人,四轴和六轴相交[3](大部分机器人四轴和六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只和结构有关).机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock. 当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°),四轴和六轴共线,奇异在此发生。
因此,在某系机器人仿真软件里,比如说ABB的robotstudio,当你打开机器人模型的时候,机器人的五轴会是这样的:耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点。
除了这种奇异点,还有其他两种:1轴和6轴奇异点(Alignment singularity)三、当机器人的2轴和3轴产生奇异点(Elbow singularity)比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1和v2. v1是由于第一个旋转关节产生的;v2是由于第二个旋转关节产生的;图(a ) 图(b )可以看到图(a )中两个速度矢量v1和v2在平面上没有共线,它们是独立的、不共线的,我们是可以通过调整v1和v2的大小来得到任意的合速度的(大小和方向)。

工业机器人的编程与操作方法工业机器人是一种高度自动化的设备,可以完成各种任务,如搬运、装配、焊接等。
为了使机器人能够准确、高效地完成任务,需要进行编程和操作。
本文将介绍工业机器人的编程和操作方法。
一、编程方法1. 离线编程:离线编程是在计算机上进行机器人程序的编写和模拟。
首先,需要使用专业的机器人软件,如ABB RobotStudio、KUKA Sim、Fanuc RJ3等。
然后,通过图形界面或编程语言来编写机器人程序。
离线编程可以在计算机上进行,无需将机器人放置在生产线上,节省了时间和资源。
完成程序编写后,可以通过模拟功能进行程序仿真,以确保程序的可行性和准确性。
2. 在线编程:在线编程是在实际生产环境中对机器人进行编程。
这种编程方法需要专业的编程设备和软件。
首先,需要连接计算机和机器人,并确保通信正常。
然后,使用机器人控制器上的编程语言或机器人操作界面进行编写。
在线编程可以实时修改和调试程序,但需要在现场进行,可能会受到实际环境的限制。
二、操作方法1. 手动操作:手动操作是指通过外部操作设备,如手柄或按钮,来操控机器人完成任务。
手动操作通常用于机器人的调试和测试阶段,可以在不编写复杂程序的情况下对机器人进行控制。
但手动操作的精度较低,只适用于简单、粗略的操作。
2. 自动操作:自动操作是指通过事先编写好的程序,使机器人按照预定的路径和动作来完成任务。
自动操作需要在编程阶段对机器人的动作进行规划和设定,确保机器人可以准确无误地完成任务。
自动操作可以提高生产效率和产品质量,减少人为错误。
三、编程语言1. 基于图形界面的编程语言:图形界面编程语言是一种以图形元件为基础的编程语言,如ABB RobotStudio的RobotWare、KUKA Sim的KRL等。
这些编程语言通过拖拽和连接图形元素来编写机器人程序,使编程变得更加直观和易于理解。
它们适用于初学者和非专业人员,但在处理复杂的逻辑和算法时可能有限。
ABB机器人奇异点管理说明:ABB机器人在运行和手动操作过程当中,有时候会进过机器人奇异点,造成机器人停止并报错,报奇异点错误。
这里主要了解机器人奇异点和相应解决办法,添加指令和使用指令。
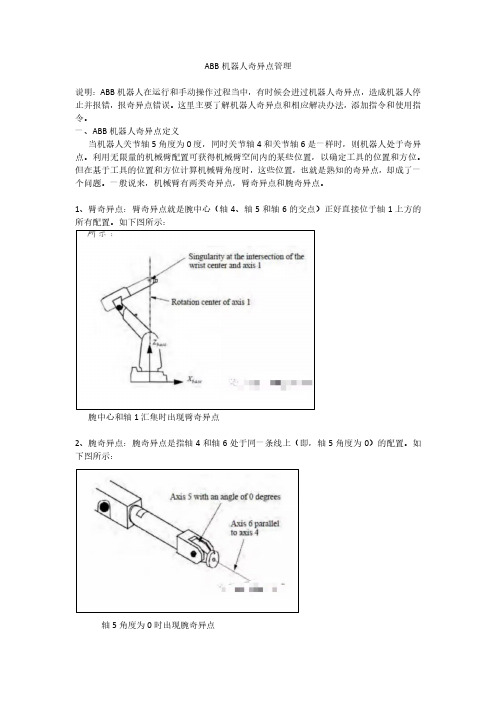
一、ABB机器人奇异点定义当机器人关节轴5角度为0度,同时关节轴4和关节轴6是一样时,则机器人处于奇异点。
利用无限量的机械臂配置可获得机械臂空间内的某些位置,以确定工具的位置和方位。
但在基于工具的位置和方位计算机械臂角度时,这些位置,也就是熟知的奇异点,却成了一个问题。
一般说来,机械臂有两类奇异点,臂奇异点和腕奇异点。
1、臂奇异点:臂奇异点就是腕中心(轴4、轴5和轴6的交点)正好直接位于轴1上方的所有配置。
如下图所示:腕中心和轴1汇集时出现臂奇异点2、腕奇异点:腕奇异点是指轴4和轴6处于同一条线上(即,轴5角度为0)的配置。
如下图所示:轴5角度为0时出现腕奇异点二、如何避免解决机器人出现奇异点1、布局以及夹具设计在进行工作站布局时候,要考虑机器人和各个设备之间的摆放布局位置,尽量考虑到机器人在工作过程当中,避免机器人经过奇异点;还可以在考虑机器人夹具在工作中对机器人姿态影响,进而避免奇异点。
如果已指定参数Wrist,则对方位进行接头插补,以避免奇异点。
在这种情况下,TCP遵循正确的路径,但是工具方位会稍微偏离。
当未通过奇异点时,亦将出现上述情况。
2、SingArea指令在编程时,也可以使用SingArea这个指令去让机器人自动规划当前轨迹经过奇异点时的插补方式。
如:SingAreaWrist:允许轻微改变工具的姿态,以便通过奇异点SingAreaOff:关闭自动插补(1)使用说明SingArea用于定义机械臂如何在奇异点附近移动。
SingArea亦用于定义关于拥有不到六个轴的机械臂的线性和圆周插补,在轴4锁定为0或+-180度的情况下,可编程六轴机械臂运行。
本指令仅可用于主任务T_ROB1,或者如果在MultiMove系统中,则可用于运动任务中。
教你如何避开机器人这三类“奇点”机器人奇点是个让生产商和用户都很头痛的问题,碰上了,严重点可能造成“机毁人亡”。
那到底什么是机器人奇点,它是怎么形成的,怎么样才能避免机器人奇点?下面这篇文章由Robotiq公司的Alex Owen-Hill撰写,它能让你全面了解这些烦人的问题。
如果你对科学感兴趣,“奇点”很可能会让你想起黑洞。
自从美国LIGO实验室证明了引力波的存在之后,黑洞就被媒体广泛报道,为大众所熟知。
根据物理学家推论,在黑洞的中心,存在一个“引力奇点”,这意味着那里的引力非常大,甚至趋于无穷大。
机器人奇点的概念跟黑洞完全一样。
机器人奇点是什么?他们怎么会像黑洞一样?我的机器人要“疯”了想象一下,你想用你的机器人喷qiang画一条线,如果这条线想要画得完美,机器人需要以一个恒定的速度移动。
如果机器人改变速度,则这条线可能会有粗有细,看起来就不是很好。
如果机器人减速太多,我们可能会看到线上有难看的斑点。
很显然,在画线的时候,机器人以恒定的速度运动是非常重要的。
机器人是非常精确的。
在通常情况下,机器人可以处理好这个问题,无任何压力。
然而,如果在这条线上存在运动奇点,这项工作将不可能完成。
为什么会存在奇点?如何解决?有两种方式可以解决这个问题,但首先让我们了解一下发生了什么事情。
奇点趋于无穷大我在前面曾说过,黑洞中心的引力“趋于无穷大”。
这就意味着,你越靠近中心,引力会变得越大。
在黑洞的中心,引力在理论上是无限大的。
这也许不是真的(没有人知道),但这是一个数学特性。
数学可以很容易处理无穷的概念,而现实世界不能。
大量的数学方程趋于无穷大。
正如这位物理学家解释的那样,理论上来说,你每次拔下浴缸的塞子,都创造了一个奇点。
其基本原理就是,越接近孔的中心,水流越快。
根据这个理论,在孔的正中心,水流速度趋于无限快。
在现实中,却并非如此。
据我们所知,物理系统的速度并不能达到无限快。
机器人之所以会存在奇点,是因为机器人是由数学控制(它可以达到无限大),但移动的是真实的物理部件(它无法实现无限大)。
产生的结果如下:∙机械臂自由度减少,从而无法实现某些运动∙某些关节角速度趋向于无穷大,导致失控∙无法求逆运算当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP 点的路径速度会显著减慢。
因此,应避免机器人的轨迹经过奇点附近。
如何产生奇异点(singularity)说到奇异点的产生就不得不提一下的Gimbal Lock[2].如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:当其中pitch角向上达到90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度。
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
腕部奇点发生在4轴和6轴重合(平行)时。
肩部奇点发生在腕部中心位于1轴旋转中心线时。
肘部奇点发生在腕部中心和2轴3轴一条线。
4轴和6轴产生奇异点(wrist singularity)下图中的六轴机器人,四轴和六轴相交[3](大部分机器人四轴和六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只和结构有关).机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock. 当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°),四轴和六轴共线,奇异在此发生。
因此,在某系机器人仿真软件里,比如说ABB的robotstudio,当你打开机器人模型的时候,机器人的五轴会是这样的:耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点。
除了这种奇异点,还有其他两种:二、1轴和6轴奇异点(Alignment singularity)三、当机器人的2轴和3轴产生奇异点(Elbow singularity)比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1和v2.v1是由于第一个旋转关节产生的;v2是由于第二个旋转关节产生的;图(a)图(b)可以看到图(a)中两个速度矢量v1和v2在平面上没有共线,它们是独立的、不共线的,我们是可以通过调整v1和v2的大小来得到任意的合速度的(大小和方向)。
机器人奇异点This model paper was revised by the Standardization Office on December 10, 2020产生的结果如下:机械臂自由度减少,从而无法实现某些运动某些关节角速度趋向于无穷大,导致失控无法求逆运算当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显着减慢。
因此,应避免机器人的轨迹经过奇点附近。
如何产生奇异点(singularity)说到奇异点的产生就不得不提一下的GimbalLock[2].如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:当其中pitch角向上达到90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度。
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
腕部奇点发生在4轴和6轴重合(平行)时。
肩部奇点发生在腕部中心位于1轴旋转中心线时。
肘部奇点发生在腕部中心和2轴3轴一条线。
4轴和6轴产生奇异点(wrist singularity)下图中的六轴机器人,四轴和六轴相交[3](大部分机器人四轴和六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只和结构有关).机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock. 当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°),四轴和六轴共线,奇异在此发生。
因此,在某系机器人仿真软件里,比如说ABB的robotstudio,当你打开机器人模型的时候,机器人的五轴会是这样的:耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点。
除了这种奇异点,还有其他两种:二、1轴和6轴奇异点(Alignmentsingularity)三、当机器人的2轴和3轴产生奇异点(Elbow singularity)比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1和v2.v1是由于第一个旋转关节产生的;v2是由于第二个旋转关节产生的;图(a)图(b)可以看到图(a)中两个速度矢量v1和v2在平面上没有共线,它们是独立的、不共线的,我们是可以通过调整v1和v2的大小来得到任意的合速度的(大小和方向)。
机器人奇异点的理解每种型号的机器人都有奇异点,那么奇异点就是如何产生?产生的结果?当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显著减慢。
因此,应避免机器人的轨迹经过奇点附近。
奇异点产生如下结果:1、机械臂自由度减少,从而无法实现某些运动2、某些关节角速度趋向于无穷大,导致失控3、无法求逆运算如何产生奇异点(singularity)说到奇异点的产生就不得不提一下的Gimbal Lock[2]、如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:当其中pitch角向上达到90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度。
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
1、腕部奇点发生在4轴与6轴重合(平行)时。
2、肩部奇点发生在腕部中心位于1轴旋转中心线时。
3、肘部奇点发生在腕部中心与2轴3轴一条线。
4轴与6轴产生奇异点(wrist singularity)下图中的六轴机器人,四轴与六轴相交[3](大部分机器人四轴与六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只与结构有关)、机器人的五轴与四轴与六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock、当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都就是0°),四轴与六轴共线,奇异在此发生。
因此,在某系机器人仿真软件里,比如说ABB的robotstudio,当您打开机器人模型的时候,机器人的五轴会就是这样的:耷拉着小脑袋真不就是为了卖萌,而就是为了避开奇异点。
除了这种奇异点,还有其她两种:1轴与6轴奇异点(Alignmentsingularity)三、当机器人的2轴与3轴产生奇异点(Elbow singularity)比如在当前的姿态下,机器人的端点可以产生的速度就是由两个速度合成的:v1与v2、v1就是由于第一个旋转关节产生的;v2就是由于第二个旋转关节产生的;图(a) 图(b)可以瞧到图(a)中两个速度矢量v1与v2在平面上没有共线,它们就是独立的、不共线的,我们就是可以通过调整v1与v2的大小来得到任意的合速度的(大小与方向)。