机械手在数控车床上的应用_李伦兴
- 格式:pdf
- 大小:1.21 MB
- 文档页数:3

工业机器人在数控机床中的运用探讨发表时间:2019-08-30T09:30:23.000Z 来源:《防护工程》2019年12期作者:李清峰[导读] 本文主要对工业机器人在数控机床中的运用进行系统性的分析和探讨,希望可以为我国工业领域的发展提供一些借鉴意义。
利戴工业技术服务(上海)有限公司上海 201807摘要:在进行机械制造加工的过程中,数控机床是非常关键的设备装置,为了进一步促进数控机床生产效率和质量的提高,需要科学有效的利用工业机器。
基于此,本文主要对工业机器人在数控机床中的运用进行系统性的分析和探讨,希望可以为我国工业领域的发展提供一些借鉴意义。
关键词:工业机器人;数控机床;运用前言:近年来,我国信息化技术的发展速度越来越快,工业生产领域也开始有效的应用一些先进的技术手段。
在新时期,将工业机器人科学合理的应用于数控机床当中,可以进一步促进生产时效的提高,更好的满足生产需求,下面对此进行具体的分析。
1.工业机器人的应用优势在数控机床中科学合理的运用工业机器人,能够促使数控机床加工能力的提高。
同时还可以进行有效的参数设置,对加工时出现的误差做出补偿,防止误差长时间累积在一起。
二者的有机结合使得数控机床具有良好的高柔性,能够根据加工工件的大小、型号和形状等,更换适宜的夹具,以便更好的满足各类产品的加工要求,而且换产期间消耗的时间较短,可以进一步提高生产能效。
除了上述优势特征外,运用工业机器人还可以完善机床的各项加工功能,以便于同时完成不同种类的加工。
最后,通过对工业机器人的有效运用还能够提高机床的自动化程度,使得机床各项操作更加便捷高效,减少工人的劳动强度。
2.工业机器人在数控机床中的运用2.1设计分析为了有效的增强数控车床的生产能效,可以利用工业机器人完成传统人工的上下料操作。
在实际操作过程中,每两台数控机床之间应用一个工业机器人,在机器人上方设置料箱在其下方设置料盘,二者之间的距离保持在1200mm。
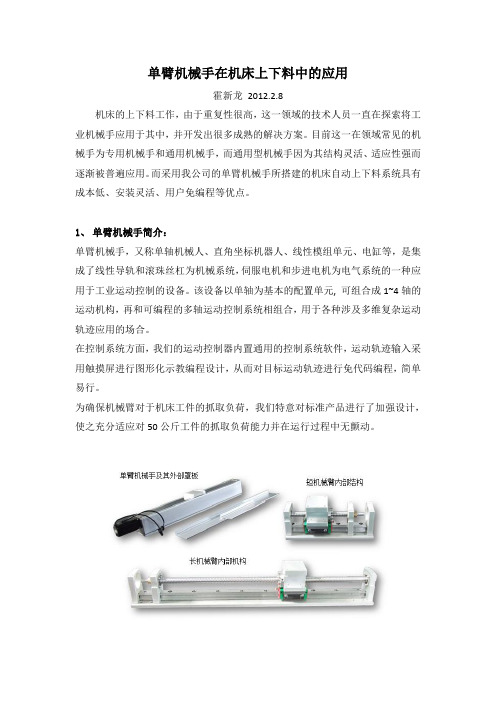
单臂机械手在机床上下料中的应用霍新龙2012.2.8机床的上下料工作,由于重复性很高,这一领域的技术人员一直在探索将工业机械手应用于其中,并开发出很多成熟的解决方案。
目前这一在领域常见的机械手为专用机械手和通用机械手,而通用型机械手因为其结构灵活、适应性强而逐渐被普遍应用。
而采用我公司的单臂机械手所搭建的机床自动上下料系统具有成本低、安装灵活、用户免编程等优点。
1、单臂机械手简介:单臂机械手,又称单轴机械人、直角坐标机器人、线性模组单元、电缸等,是集成了线性导轨和滚珠丝杠为机械系统,伺服电机和步进电机为电气系统的一种应用于工业运动控制的设备。
该设备以单轴为基本的配置单元, 可组合成1~4轴的运动机构,再和可编程的多轴运动控制系统相组合,用于各种涉及多维复杂运动轨迹应用的场合。
在控制系统方面,我们的运动控制器内置通用的控制系统软件,运动轨迹输入采用触摸屏进行图形化示教编程设计,从而对目标运动轨迹进行免代码编程,简单易行。
为确保机械臂对于机床工件的抓取负荷,我们特意对标准产品进行了加强设计,使之充分适应对50公斤工件的抓取负荷能力并在运行过程中无颤动。
2.机械臂的选型:机械臂的选型涉及到对机床上料及下料动作的安排,通常的动作安排为X-Z平面内的两维运动:1).上料过程的动作:机械臂沿X轴运动到工件取料位置的上方后停止,然后Z 轴向下运动使张开的手爪刚好能抓住工件,闭合手爪抓住工件后,使Z轴再向上运动到指定高度,然后再沿X轴方向运动到工作台卡盘正上方,然后Z轴向下运动把工件装入卡盘或工装内。
然后卡盘夹紧,Z轴上升到超出机床防护罩上方,X轴再运动到等待位置等待机床完成工件的加工。
2). 下料过程的动作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,然后沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。

工业机器人在数控机床中的运用实践研究随着科技的不断进步,工业机器人在各个领域中的应用越来越广泛。
在数控机床中的工业机器人应用具有重要的意义和价值。
工业机器人在数控机床中的运用实践研究,可以有效提高生产效率、降低劳动强度和实现智能化制造。
工业机器人是一种可以自动执行重复性工作的机器人系统,能够完成特定任务或操作。
数控机床则是一种通过数控系统来进行工作控制的机床。
数控机床具备高精度、高效能的特点,可以实现复杂的加工操作。
将工业机器人与数控机床结合起来,可以更好地发挥两者的优势,提高工作效率和产品质量。
工业机器人在数控机床中的运用可以提高生产效率。
传统的加工方式往往需要工人进行人工操作,操作时间长、效率低。
而工业机器人具有高速、高精度的特点,可以快速准确地完成各种加工操作,大大缩短了加工周期。
工业机器人还可以24小时连续工作,不需要休息,不会出现疲劳现象,大大提高了工作效率。
工业机器人的运用可以降低劳动强度。
传统的加工方式需要工人进行繁重的体力劳动,长时间的操作会导致身体疲劳和职业病的发生。
而工业机器人在数控机床中的应用可以实现自动化加工,减少了工人的体力劳动。
工人只需要进行简单的监控和调整,无需长时间操作。
这样不仅可以减少工人的劳动强度,还可以保护工人的身体健康。
工业机器人的运用可以实现智能化制造。
随着人工智能技术的不断进步,工业机器人具备了一定的智能化水平。
通过对机器人进行编程和设置,可以使其具有自动检测、自动调整和自动学习的能力。
在数控机床中,工业机器人可以根据产品的要求自动切换工艺和加工参数,实现加工过程的智能化控制。
这不仅可以提高产品质量和加工精度,还可以减少因为人为操作错误而带来的损失。

工业机器人在数控机床中的运用实践研究一、工业机器人在数控机床中的应用现状工业机器人在数控机床中的应用,可以实现各种复杂工艺的自动化操作,包括搬运、装配、焊接、喷涂等各种作业。
传统的数控机床需要由操作人员对其进行操作,效率较低且存在操作误差。
而引入工业机器人后,可以通过编程控制机器人完成各种复杂工艺操作,提高生产效率和减少人为误差。
目前,工业机器人在数控机床中的应用已经逐渐成为行业发展的趋势,被广泛应用于汽车制造、家电制造、航空航天等行业。
在汽车制造行业,我们进行了一项工业机器人在数控机床中的实践研究。
我们选取了汽车车身焊接的工艺过程作为研究对象,将工业机器人引入到数控机床中进行焊接作业。
我们对车身焊接工艺进行了分析,确定了焊接工艺的步骤和要求。
然后,我们对工业机器人进行编程,设计了焊接路径和参数,并将其与数控机床进行联动控制。
我们进行了焊接实验,对工业机器人在进行焊接操作时的准确度、效率和质量进行了评估。
实践研究结果表明,工业机器人在数控机床中的应用可以显著提高焊接效率和质量。
与传统的手工焊接相比,工业机器人具有更高的焊接精度和稳定性,可以保证焊接质量的一致性;机器人的操作速度快,可以大幅提高焊接效率,节约人力成本。
由于机器人的操作具有高度的可编程性,可以根据不同的焊接要求进行灵活调整,适应不同车型的焊接工艺需求,具有很高的适用性。
工业机器人在数控机床中的应用虽然已经取得了一定的成果,但仍面临着一些挑战和机遇。
未来,随着工业4.0和智能制造技术的不断发展,工业机器人在数控机床中的应用将更加广泛和深入,可能呈现以下几个趋势:1. 智能化:工业机器人在数控机床中的应用将更加智能化,通过引入人工智能、机器视觉和传感器等技术,实现对机器人操作的自主感知和决策,提高其适应性和灵活性。
2. 网络化:工业机器人在数控机床中的应用将更加网络化,实现机器人之间的信息共享和协作,以及与其他生产设备的联动控制,实现智能化的生产流程。

数控车床机械手的应用数控车床机械手只是数控机床的一个配件,尽管这种产品在国内出现的时间并不是很长的,但是由于这种产品自身的各方面性能是非常优越的,因此,这样的产品才可以赢得广大消费者的喜爱,而且这种设备的使用给人们带来的好处也是非常多的。
熟悉博立斯的数控车床机械手的人应该都知道的,这种设备采用的制作材料具有相当强大的抗腐蚀性,由于这种制作材料的特殊性,这样的产品长期搁置在这样的环境也可以确保产品的各方面性能得到正确的发挥。
数控车床机械手在使用的时候故障出现几率也是非常低的,即便是出现这些故障,在很大程度上,人们也可以采取正确的方式,更好的解决这些问题,从而节省一笔不少的维修费用。
相对于与普通的机械手而言,博立斯的数控车床机械手的产品机构是非常独特的,这样的产品结构不仅可以确保产品的稳定性,也可以使得这样的设备得到正常的运行。
博立斯数控车床机械手的应用现今人们在对数控车床机械手进行相应的使用时,其设备在质量上有良好的保证。
并且在对其设备进行应用时,也应当按照标准的使用方法,来对其进行合理的使用。
在对其机械手进行应用时,可以将其广泛的应用于不同的行业中,比如说可以将其广泛的应用于不同的航空领域中,以及大型的精密数控等行业中。
当然在对车床机械手进行操作时,其设备也便于人们对其使用。
并且在对其设备进行应用时,也可以将其用于精密零件的加工行业中。
并且也可以将其适用于不同的变速箱中。
数控机械手在当前的市场经济中,因其便于人们对其操作,所以使其设备在人们的应用中,得到人们的肯定。
在对其设备进行操作时,其设备也便于人们对其使用。
当然在对其设备进行应用时,其设备在性能上也有良好的保证。
就现今市场经济不断完善的社会中,使其设备在人们的应用中,得到人们的青睐。
当然在对其设备进行操作时,其设备也具有良好的效用性。
随着工艺技术的不断完善,人们对CNC机械手的应用有了一定的推广。
在对其设备进行操作时,其设备便于人们对其进行相应的操作。

工业机器人在数控机床中的运用实践研究随着工业自动化的不断发展,工业机器人已成为现代制造业中不可或缺的一部分。
工业机器人在数控机床中的运用实践研究,旨在探讨如何通过机器人技术的引入,提高数控机床的生产效率和产品质量。
数控机床是一种通过数字控制系统实现工艺过程的自动化设备。
它具有高精度、高稳定性和高效率等优点,逐渐取代传统的手工操作和半自动操作。
数控机床的自动化程度仍有待提高,特别是在一些复杂的工艺过程中。
工业机器人作为自动化装备的一种,具有高精度、高重复性和高灵活性等优点,在数控机床中具有广泛的应用前景。
工业机器人可以完成一些重复性高、精度要求高的作业任务,如零件的装卸和定位等。
工业机器人可以通过编程实现灵活的操作,适应不同的工艺过程和产品要求。
工业机器人可以通过与数控系统的联动,实现自动化的生产过程。
需要确定机器人在数控机床中的具体应用。
根据数控机床的特点和工艺需求,确定机器人所负责的具体任务和功能。
在车床加工过程中,机器人可以负责零件的装卸和定位;在铣床加工过程中,机器人可以负责工件的定位和夹持等。
需要对机器人进行编程和控制。
通过编程,实现机器人的自动操作和路径规划。
通过控制,实现机器人与数控系统的联动,实现整个生产过程的自动化。
然后,需要进行机器人的安装和调试。
机器人的安装需要考虑机器人与数控机床的协作,确保机器人能够准确、稳定地完成操作。
机器人的调试需要进行路径规划和运动控制的测试,确保机器人的运动精度和稳定性。
需要进行机器人在数控机床中的运用实践。
通过实际生产过程的测试和实验,评估机器人在数控机床中的效果和性能。
根据实践的结果,可以对机器人进行改进和优化,提高其适用性和效率。
数控车床的上下料机械手臂的研究和探讨-机械工程论文-工程论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——机械手臂论文研究热点范文8篇之第六篇:数控车床的上下料机械手臂的研究和探讨摘要:本文以数控车床的上下料机械手臂为研究对象,采用可编程控制器(PLC)对其气压的驱动装置进行电气控制,实现了系统的智能化和柔性化。
对系统的工作原理及机械结构、气压驱动和PLC控制方案等方面进行了较为详尽的论述。
关键词:自动化上下装料;PLC; 气压系统;随着现代工业自动化的发展,出现了各种数控加工中心,它在减轻工人劳动强度的同时,提高了劳动生产率。
但以往数控加工中常见的上下料工序,通常仍采用人工操作或传统继电器控制的半自动化装置。
前者费时费工、效率比较低;后者因设计复杂,需较多继电器,接线繁杂,易受车体振动干扰,而存在可靠性差、故障多、维修困难等问题。
为解决这些问题,我们研究开发了一套采用可编程序控制器PLC控制的装料机械控制系统。
该系统动作简单可靠、线路设计实用合理、具有极强的抗干扰能力,保证了系统运行的可靠性,降低了维修率,并提高了工作效率。
一、系统工作原理本系统的上下料机械手采用料斗,搬运和上下料组件的整体结构,这种料斗可通过调节通道尺寸变动料件的规格,具有结构紧凑、运动平稳准确的特点,可以方便地实现无级调速。
本设备抓取工件质量可达1kg,工作范围为横向1m,纵向0.9m,并且可以调节距离范围。
系统开机启动时,先进行自检,若机器正常,则机械手处于待料位置,泵站电机处于卸荷状态。
当加工开始信号传来时,机械手臂开始动作,其具体行动过程如下:原始位置机械臂伸出开关发出料到位信号真空吸盘松开(放料)尾架合拢(同时卡盘夹紧工件,机床开始加工)托爪退出送料架升起托爪复位加工结束(主轴动力脱开, 刹车进入)机械手进入取工件机械手真空吸盘吸住工件尾架刹车退出机械手将工件拔出机械手将工件取出机械手把工件搬运到下一工位机械手真空吸盘松开工件机械手复位,系统原位卸荷。
桁架式机械手在数控车床自动化生产中的应用与优势随着制造业的快速发展和智能化转型,数控车床作为精密加工领域的关键设备,其自动化水平的提升成为了提高生产效率、降低人力本钱的紧要途径。
桁架式机械手作为自动化生产线上的紧要组件,因其结构设计和高效的工作性能,在数控车床上的应用日益广泛,为制造业的升级供应了强大的技术支持。
一、桁架式机械手概述桁架式机械手主体结构采用桁架形式,通常由两根平行的立柱和横梁构成一个稳固的三角形或矩形框架,通过高精度的导轨和驱动系统实现XYZ三个方向的自由移动。
这种设计不但确保了机械手的稳定性和刚性,还大大扩展了其工作范围和敏捷性,使之成为数控车床自动化上下料、搬运等工序的理想选择。
二、在数控车床中的应用自动上下料:桁架式机械手能够精准地从料仓中抓取待加工工件,输送到数控车床的加工区域,并在加工完成后,自动将产品移出,放置到位置,实现了从原材料到产品的全程自动化处理,极大地提高了生产效率,减少了人工干涉,降低了劳动强度和误操作风险。
敏捷适应多任务:通过编程掌控,桁架式机械手可以轻松应对不同尺寸、形状的工件,实现快速换型,满足多样化生产需求。
另外,它还可以配备视觉识别系统,进一步提高工件定位的准确性和效率。
优化生产布局:由于其结构特点,桁架式机械手可以在数控车床上方或侧面安装,不占用过多地面空间,有利于车间的紧凑布局和敏捷调整生产线,适应将来生产规模的扩大或工艺流程的变动。
三、技术优势高精度与稳定性:采用高质量的直线导轨和伺服驱动系统,确保了机械手运行的高精度和重复定位精度,即使在长时间连续作业下也能保持稳定性能,符合精密加工的严格要求。
高效率与敏捷性:快速的运动速度和大范围的工作空间,使得桁架式机械手能够高效完成上下料等任务,同时,模块化设计便于依据实际需求进行功能扩展和升级,提升生产线的敏捷性和应变本领。
易于维护与集成:标准化和模块化的结构设计,使得桁架式机械手的安装、调试及日常维护工作相对简便,易于与现有数控车床及工厂信息化系统(如MES、ERP)集成,实现生产数据的实时监控与管理,促进智能制造的发展。
自动换刀机械手在数控技术中的应用孔宪玉【摘要】Mechanical manufacturing industry is the lifeblood of a country, embodies the comprehensive national strength, and the modern NC machining technology is the backbone of manufacturing industry. The automation tool changer has promoted the NC development, making the NC bed develop towards the direction of high repeat precision, modularity, energy conservation, electromechanical integration.%机械制造业是一个国家的命脉,综合国力的体现,而现代数控加工技术是制造业的支柱.自动换刀机械手促进了数控机床的发展,使数控机床朝着重复精度高、模块化、节能化、机电一体化方向发展.【期刊名称】《价值工程》【年(卷),期】2017(036)029【总页数】2页(P198-199)【关键词】数控加工技术;数控机床;自动换刀机械手【作者】孔宪玉【作者单位】巴音郭楞职业技术学院机电系,库尔勒841000【正文语种】中文【中图分类】TG659数控技术(英文:Numerical Control简称:NC),起源于20世纪中期,是一种由数字程序对机床执行自动控制的技术,它是由数字、文字和符号组成的数字化信号对一台或多台机械加工设备及其加工过程进行控制的一种技术。
它通常控制加工时的位移、切削量、转速、走刀轨迹等有关机械量以及与机械量流向相关的开关数字量。
数据载体和0、1逻辑形式运算的出现是数控技术产生的基础,在当今的机械制造业业界数控技术也被称为计算机数控技术(Computerized Numerical Control简称:CNC),计算机数控技术是由计算机软件完成对机床数字程序的控制,是现代制造业数字信息化的重要构成单元。
单机器人手臂在机械加工中的应用研究随着工业自动化的不断发展,机器人技术已经成为现代工业生产的重要支撑。
其中,单机器人手臂的应用在机械加工中尤为重要。
本文将探讨单机器人手臂在机械加工中的应用研究。
一、单机器人手臂简介单机器人手臂是机器人技术中的一种常见形式。
它通常由一个机械臂、一个执行器和一组传感器组成。
机械臂是机器人的主体,执行器用于控制机械臂的位置和运动,传感器用于感知环境和工件。
二、单机器人手臂在机械加工中的应用1. 数控机床数控机床是现代机械加工中的重要设备。
它通过数字控制系统的指令来控制机床的各种动作。
单机器人手臂可以与数控机床配合使用,提高生产效率和精度。
通过控制机械臂的位置和姿态,机器人可以进行轮廓加工、孔加工和螺纹加工等操作。
2. 自动钻孔机自动钻孔机是机械加工中的一种特殊设备,主要用于孔加工。
单机器人手臂可以用于自动钻孔机的操作。
机器人可以通过控制机械臂的位置和姿态,将工件定位到钻头的位置,然后控制钻头进行钻孔操作。
这样可以提高加工的精度和速度。
3. 自动车削机自动车削机是机械加工中的一种常见设备,主要用于轴类工件的加工。
单机器人手臂可以用于自动车削机的操作。
机器人可以通过控制机械臂的位置和姿态,将工件放置到车削机上,然后控制车床进行车削操作。
这样可以提高加工的精度和速度。
三、单机器人手臂的优点1. 操作自由度高单机器人手臂具有多个自由度,可以实现多方向的运动。
这可以使机器人适应各种不同的加工场景。
2. 操作精度高机器人可以通过传感器感知工件的位置和形状,从而通过控制机械臂的位置和姿态来精确地进行加工。
这可以提高加工的精度和准确性。
3. 生产效率高单机器人手臂可以进行自动化操作,可以对同一种工件进行高速、高效的加工。
这可以提高生产效率,进一步降低生产成本。
四、单机器人手臂的应用前景单机器人手臂在机械加工中的应用前景非常广阔。
它可以实现加工的自动化、智能化和高效化。
未来,随着机器人技术的进一步发展,单机器人手臂将会在机械加工中得到更广泛的应用。
机械手在数控车床上的应用
李伦兴1辛丽2
(1沈阳机床股份有限公司沈一车床厂,辽宁沈阳 110142; 2沈阳装备制造工程学校,辽宁沈阳 110026)摘要:面对加工设备陈旧和技术工人缺乏的现状,当前的轴承行业迫切需求加工设备智能化,本文应某轴承企业要求,针对数控车床设计与之配套的机械手,以实现轴承环的自动上下料。
本文从设计方案的总体入手,深入阐述了在数控机床上配套机械手,其对于加工对象、机床、料仓以及机械手本身的结构与功能要求,从生产实际出发,提出自己的设计观点。
本文设计的机械手作为一种小型的机器人,动作灵活可靠,结构相对简单,不光提升了设备自动化程度,而且还能降低人力成本。
现在沈一车床厂已试生产,客户反映良好。
关键词:数控车床机械手自动化
Abstract: Facing the situation of old equipment and lack of technical workers, the bearing industries need intelligent processing equipment urgently. This paper for the CNC lathe designs its matched up-down materials manipulator, in order to meet the requirement of a bearing enterprise. This paper shows us the overall design, researches structure and function about supporting object, , storage bin and the robot itself, proposes own design ideas above production requirements. This design of manipulator is a miniature robot, moves flexibly and reliably, its structure is relatively simple, not only improves automation degree of machine tool, but also can reduce manpower cost. Now, SHENYANG NO.1 LATHE WORKS has produced a CNC lathe matched up-down materials manipulator, customers reflect well.
Keywords: CNC lathe, Manipulator, Automation
1引言
目前,随着科学技术的发展与应用,在保证产品质量的情况下,只有提高劳动生产率和减轻生产成本,才能提高产品的竞争力,于是机械自动化的生产成为必然趋势,因此很多不同用处的机器人应运而生[1]。
为了提高劳动生产率和实现自动化生产,机械手作为一种小型的机器人,因其机构相对简单,近年来得到多种行业的青睐。
目前,国内已有的机械手结构复杂,成本较高。
于是开发适合机床自动上下料机械手响应了市场要求,尤其是发展以大批量生产为主的轴承工业的必然趋势,同时对机床的智能化发展也有重要的意义。
本文应轴承制造企业要求,针对数控车床,设计了与其配套的上下料机械手,不光动作可靠平稳,而且结构简单、工艺性好,使其既能满足功能要求又具有良好的经济性。
2总体设计
根据工件的规格、重量和加工节拍可以把机械手分成内藏式机械手和桁架机械手两大类。
将机械手作为工件从料仓到卡盘的桥梁。
内藏式机械手形式简单,成本低,换料时间快,操作简单适用于中小批量的单机自动上下料,并且对于工料仓的要求低[2],见图1。
图1 内藏式机械手
桁架机械手动作平稳性高,征集协作性好,适用于以大批量生产为主的轴承工业。
本文设计的机械手属于桁架机械手,并利用PRO/E完成了结构的建模[3],检验了整机的干涉状况,见图2。
图2 桁架机械手
3配套要求
3.1对加工对象的要求
由于本文的研究对象是轴承,不光是成批量生产,还涉及到多种结构形式。
图3给出轴承精锻件的形状,本机械手设计时考虑到可以适合下图中各种轴承内外环的形状。
图3轴承精锻件的形状
因为机械手行程小,所以对工件的毛坯有一定的要求,故对工件来说它的半精加工与精加工更适用于机械手的应用。
3.2对机床的要求
本文实际的研究对象是在数控车床上内藏式机械手,为了保证机械手的自动上下料功能,机床必须做一系列配套的结构。
3.2.1卡爪行程检测
机床在无人运转状态下,为确保工件夹持正确且已确实夹紧,需在主轴卡盘部位加上卡爪行程检测装置,以检测夹爪是否满足正确夹持行程,使机床运行安全可靠,满足工件的加工精度。
3.2.2主轴上方吹气
在无人运转状态下,为维持加工的安全性与精度,必须在每次加工后,清除卡盘上的残留切屑,确保工件夹持不受残留切屑干扰,所以本文研究决定在车床卡盘上方安装吹气设备。
3.2.3机械手控制接口
机械手的智能化是由数控车床系统控制的。
为了连接机床与机械手等其他辅助设备,本文选择机床的控制单元藉I/O接点驱动设备及接收检测信号,作为加工机与系统间连接的接口。
3.2.4刀具要求
要求机床刀具应带有断屑功能,防止铁屑过大影响整机运行的可靠性。
3.2.5刀具检测
要求机床具有刀具检测手段,防止因刀具磨损影响工件的加工质量。
3.2.6自动门
为提升换料效率,机床加装自动门,供机械手由自动门出入机床,一方面为防止机械手换料时切屑及油水飞溅,减小吹气时的噪音,且换料时整体安全性较佳,另一方面自动门由于行程开闭时间较短,可提升设备的有效移动率。
3.3对于料仓的要求
根据轴承的规格、形状、重量可以把料仓划分成三大类即滚动料仓、直线料仓和旋转料仓[2]。
滚动料仓一般适用于工件形状小(外径≤φ120),重量轻(质量≤2kg),中小批量化生产的轴承。
直线料仓一般适用于工件形状不规整外径大(φ300≤外径≤φ600),总量大(质量≤30kg),小批量化生产的轴承。
旋转料仓一般适用于工件形状(φ120≤外径≤φ300),大批量生产的轴承。
本文选择旋转料仓结构。
4结束语
随着经济的飞速发展,轴承行业面临加工设备的更新换代和人工成本的持续升高,越来越迫切的需求数控机床的自动化功能,因此,本文所提出的在数控车床上安装轴承环自动上下料机械手的总体设计方案,使其既能满足功能要求又具有良好的经济性,已经得到越来越多的业内厂家关注。
沈阳机床股份有限公司沈一车床厂迅速抓住市场契机,目前正在大力发展机床的智能化,已经投入了很多的人力、物力,对于本文的设计给予了很大的支持,已经试生产了几台,产品实现了预期的功能,大大降低了人力成本。
参考文献
[1] 施燕. 经济型数控车床机械手建模与仿真研究. 江苏大学硕士学位,2009.
[2]汪星桥主编.机床设计手册.北京:机械工业出版社,1986
[3] 林清安. Pro/ENGINEER 2001零件设计高级篇. 北京: 清华大学出版社, 2001.
作者简介
1.李伦兴(1983-11-15),男,2006年毕业于辽宁工业大学,学士学位,现工作于沈阳机床股份有限公司沈一车床厂技术部,从事新产品研发。
通讯地址:沈阳经济技术开发区开发大路17甲1号沈阳机床股份有限公司沈一车床厂技术部,邮编:110142,E-mail:steeplixing@
2.辛丽(1982-12-12),女, 2009年毕业于大连交通大学,硕士学位,现工作于沈阳市装备制造工程学校。
通讯地址:沈阳市铁西区肇工街北4路沈阳市装备制造工程学校,邮编:110026,E-mail:xinli40088190@16。