第21页/共36页
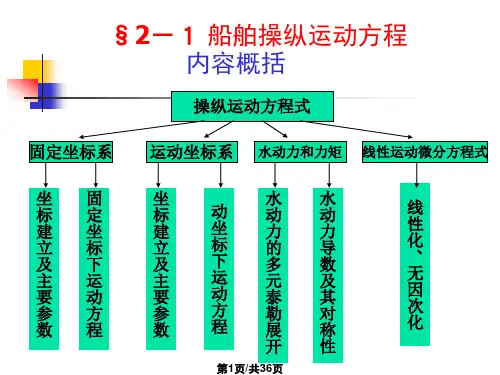
§2 -1-4 线性操纵运动微分方程
➢ 首先对水平面操纵运动的一般方程进行线性化处理. ➢ 然后和水动力、力矩的线性表达式回代到一般方程. ➢ 进行线性理论处理,忽略高阶小量得出线性微分方
程组,即为船舶操纵运动的基本方程.
基 本 方 程
(m Yv )v Yvv (mxG Yr )r (mu1 Yr )r Y (mxG Nv )v Nvv (I z Nr )r (mxGu1 Nr )r N
▪本节所述为通常采用的计算处理方法.
▪也可以将流体水动力、力矩按其成因分为流体惯性
力和流体粘性力两部分.流体惯性力采用势流理论求
解.流体粘性力表示真实流体中所受的力,运用函数 关系,采取泰勒级数展开求解.
第23页/共36页
船舶操纵性与耐波性
§2 -1-5 水动力导数
1. 定义 2. 表示符号 3. 物理含义
§2-1-1 坐标系
二、运动坐标系Oxy
运动坐标系是固结在船体上的,随船一起运动,如图所示。
O xy z构成一右手法则的固结 在船体上的坐标系。
O是动坐标系的原点,通常可选 取船舶重心或者船中剖面处。
Ox轴为船纵轴,其方向指向船 首为正
Oy轴与纵剖面 垂直,以指向右 舷为正。
Oz轴垂直于水线面,以指向龙 骨为正。
为初始状态.可以得到最后的简化的线性表达式:
第18页/共36页
船体的水动力、力矩表达
X X (u, v, r, u, v, r, ) Y Y (u, v, r, u, v, r, ) N N (u, v, r, u, v, r, )
➢ 忽略推进器转速n、n’ 的影响,操舵时间极短δ’ = 0 X方向不考虑(WHY?);展开 Y、N: