基于图像处理的集装箱吊具自动控制方案v2.0
- 格式:pdf
- 大小:397.44 KB
- 文档页数:16
基于PLC的ELME集装箱吊具电控系统改造位后,+24V经过常开触点5-2、6-2、7-2、8-2,R9得电,同时顶销灯亮,P7-5发出顶销联锁信号,开闭锁阀正常得电,吊具开闭锁后,4个开闭锁限位信号经P1-35;P1-36;P2-41;P2-42送入PCB1板,此时4个开闭锁信号有一侧到位,继电器R12经方波发生器得电,开闭锁灯经触点12-2,按照方波发生器的振荡频率闪烁,警示司机;当两侧开闭锁全部到位后,+24V经过常开触点4-2、3-2或1-2、2-2开闭锁灯指示正常,开闭所动作完成。
4 ELME吊具电控系统PLC替代方案4.1 PLC的选用综合系统控制功能需求和价格因素,三菱FX1N系列PLC具有极高的性能价格比,另外,FX1N系列PLC开放性较强,便于程序的修改,价格相对较低,因此改造中采用了三菱系列FX1N-60MPLC。
4.2 EMLE吊具PLC接线图本系统所采用的PLC(FX1N-60M)输出端为直流24V,PLC直接驱动继电器。
利用继电器线圈得电失电控制电磁阀的接通与断开,从而达到控制吊具的目的。
ELME吊具通过控制11个电磁阀的开闭,采用液压驱动,完成伸缩?开闭锁等功能。
PLC硬件接线图如图4.1所示。
4.3 软件设计根据吊具工况及电控原理,采用三菱PLC编程软件GX-Developer进行程序编写,反复调试,完成吊具程序图纸。
由于程序较大,仅节选吊具伸?慢伸控制程序(如图4.2所示)。
4.4 安装调试为了验证改造的可行性及改造后系统的稳定性,我们制作了实验配电盘,对PLC进行初步编程,在备用吊具上进行了反复试验?调试并对试验过程中出现的问题进行论证,不断完善PLC程序及改造方案,改进吊具各项功能,测试PLC 及继电器工作可靠性和各项联锁保护功能,取得了满意的效果。
ELME吊具改造后的电气线路接线箱布置图如图4.3所示。
5 结语本文针对轮胎式龙门起重机ELME吊具故障多、维护成本高的现状,寻求PLC控制替代继电控制系统。

基于图像处理的集装箱卡车对位系统作者:李约翰来源:《中国科技纵横》2020年第11期摘要:岸边集装箱起重机,简称岸桥或QC(Quay Crane)是集装箱码头堆场上的一种用来在岸边对船舶上的集装箱进行装卸的设备。
在吊运集卡平板车上的集装箱时,因岸桥作业过程中大车位置固定,所以需要集装箱卡车司机自行根据当前岸桥及吊具位置,前后移动集卡来对位。
对位过程直接影响作业效率。
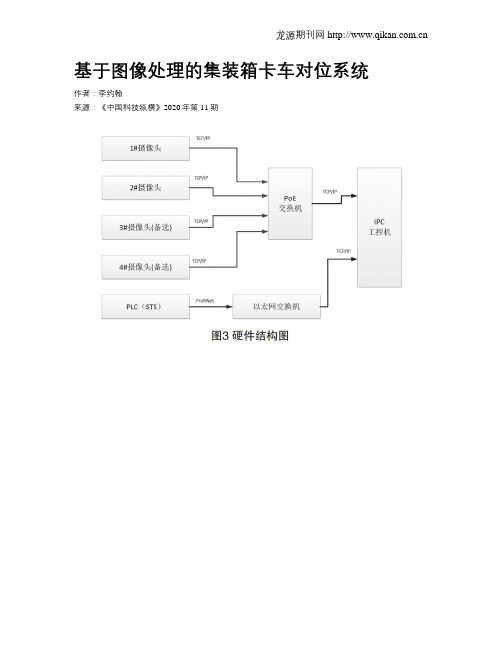
本文介绍了一种新型自动化方案的基本原理、应用方式、以及实现该方案过程中的关键技术难点和作者本人在此过程中的解决思路与处理办法,该方案通过安装在岸桥联系梁上的摄像头实现对集卡车辆的视频采集,再通过工业级计算机对实时视频图像进行高分辨率像素点处理,进而计算出当前集卡的位置,最终实现对集卡位置的精确检测,并将精确位置及引导信息通过LED显示屏显示于集卡司机。
如此实现在低改造成本的前提下的快速集卡对位,提高岸桥作业效率。
关键词:岸桥;岸边集装起重机;集卡位置图像识别;集卡对位系统0引言本文介绍了一种新型自动化方案,通过安装在岸桥联系梁上的摄像头实现对集卡车辆的视频采集,再通过工业级计算机对实时视频图像进行高分辨率像素点进行处理,进而计算出当前集卡的位置,最终实现对集卡位置的精确检测,并将精确位置值及引导信息通过LED显示屏显示于集卡司机。
如此实现在低改造成本的前提下的快速集卡对位,提高岸桥作业效率。
集卡位置难对准一直是困扰岸桥作业效率以及岸桥自动化作业的一大难题,也是一热门课题。
国内外目前也有一些尝试,主要解决方案有:在大车侧安装高精度2D激光扫描仪,在联系梁上每个车道上方安装一台2D激光扫描仪,在联系梁上安装两台3D激光扫描仪、在每个车道上安装一台激光雷达测距等,每种对位方案都具有各自的优缺点,但终究以激光侧距离为基础。
然而,激光技术虽然成熟,但其高额的成本是不可避免的,而且激光测距对车型,车架有一定的要求,综合检测精度并不高。
而现如今,图像数字技术已逐步成熟,在各个领域已经得到了成熟的应用,比如高铁车轮高速视频检测系统、生产线视频检验系统、机械手柄双面视觉系统,等等。
![一种基于图像特征点匹配的集装箱卡车防吊起自动检测方法[发明专利]](https://img.taocdn.com/s1/m/629ea7e602020740bf1e9ba1.png)
专利名称:一种基于图像特征点匹配的集装箱卡车防吊起自动检测方法
专利类型:发明专利
发明人:郭璠,张泳祥,唐宇翀,朱湘源,朱洪,唐琎
申请号:CN201910629691.4
申请日:20190712
公开号:CN110415221A
公开日:
20191105
专利内容由知识产权出版社提供
摘要:本发明公开一种基于图像特征点匹配的集装箱卡车防吊起自动检测方法,该方法包含以下步骤:步骤A:选取尚未开始起吊的图像作为基准图像,选取实时视频帧作为对比图像,并且对选取出的两幅图像进行网格划分;步骤B:对两幅图像上相应位置的子图进行特征点提取和特征点匹配,获得匹配特征点对;步骤C:以每组子图上匹配特征点对在y方向上的位置偏移量中值和该中值对应的特征点对数量作为该组子图的特征;步骤D:按列组合两幅图像各组子图的特征,建立数学模型进行集卡车防吊起的自动检测。
本发明能实现集卡车防吊起的自动检测,准确性高。
申请人:中南大学
地址:410083 湖南省长沙市岳麓区麓山南路932号
国籍:CN
代理机构:长沙市融智专利事务所(普通合伙)
代理人:杨萍
更多信息请下载全文后查看。
![基于图像处理的集装箱箱号及集卡车号识别系统[实用新型专利]](https://img.taocdn.com/s1/m/ca90ec5b001ca300a6c30c22590102020740f287.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201620532293.2(22)申请日 2016.06.02(73)专利权人 北京国泰星云科技有限公司地址 100027 北京市朝阳区望京园401号楼28层3219室(72)发明人 郑英美 高艳龙 孙超 孟朝辉 陈福兴 (51)Int.Cl.G06K 9/32(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称基于图像处理的集装箱箱号及集卡车号识别系统(57)摘要本实用新型公开了一种基于图像处理的集装箱箱号及集卡车号识别系统,包括工控机、PLC、以太网交换机和摄像机,其中:工控机分别与以太网交换机和PLC连接,以太网交换机分别与摄像机和TOS系统连接。
本系统在集装箱装卸船的过程中,通过PLC控制器控制摄像机进行高速拍照,并将实时图像通过以太网传输给工控机,由工控机上运行的箱号识别软件识别出集装箱号后再通过以太网将结果传输给TOS作业系统统一管理。
本系统解决了港口码头作业过程中,集装箱号码由人工登记导致集装箱装载效率低和人工失误导致集卡车与需要装载的集装箱不匹配的技术问题。
本系统在各种环境下都能达到较高的识别率,有效地提高了岸桥作业的效率。
权利要求书1页 说明书3页 附图2页CN 205788226 U 2016.12.07C N 205788226U1.一种基于图像处理的集装箱箱号及集卡车号识别系统,其特征在于:包括工控机、PLC、以太网交换机和摄像机,其中:工控机分别与以太网交换机和PLC连接,以太网交换机分别与摄像机和TOS系统连接;所述PLC将吊具开闭锁状态和编码器信息发送给工控机,并接收工控机发出的控制指令;所述工控机根据接收的吊具开闭锁状态和编码器信息生成抓拍命令发送给摄像机,所述摄像机将拍摄的集装箱箱号和集卡车车头图像传送给工控机,所述工控机对摄像机拍摄的图像进行识别,并将识别出的集装箱箱号和集卡车号发送给TOS系统。