第五章 多自由度机械系统动力学
- 格式:ppt
- 大小:3.77 MB
- 文档页数:128
机械多体系统动力学机械多体系统动力学是研究机械系统中多个刚体或弹性体的运动规律和相互作用的学科。
在实际工程中,机械多体系统广泛应用于各种机械设备和机器人的设计、分析和控制中。
本文将从机械多体系统的基本概念、动力学原理、运动方程和模拟方法等方面进行阐述。
1. 基本概念机械多体系统是由多个刚体或弹性体通过连接件相互连接而成的系统。
每个刚体或弹性体在空间中有一定的形状和质量分布,并通过连接件之间的约束力或弹簧力进行相互作用。
机械多体系统的运动由各个刚体或弹性体的位置、速度和加速度决定。
2. 动力学原理机械多体系统的运动遵循牛顿力学的基本原理。
根据牛顿第二定律,每个刚体或弹性体受到的合外力等于其质量乘以加速度。
同时,刚体或弹性体之间的相互作用力满足牛顿第三定律,即作用力与反作用力大小相等、方向相反。
3. 运动方程为了描述机械多体系统的运动,需要建立系统的运动方程。
对于刚体系统,可以利用牛顿第二定律和牛顿第三定律,通过力的平衡关系和运动学关系得到刚体的运动方程。
对于弹性体系统,需要考虑弹性力和材料本身的特性,运动方程可以通过弹性力和动力学关系得到。
4. 模拟方法为了研究机械多体系统的运动规律,可以采用数值模拟的方法进行仿真分析。
常用的模拟方法包括欧拉法、中点法和龙格-库塔法等。
这些方法基于数值积分的原理,通过不断迭代计算系统的位置、速度和加速度,得到系统的运动轨迹。
通过机械多体系统动力学的研究,可以深入了解机械系统的运动特性和相互作用规律,为机械设备的设计和控制提供理论依据。
例如,在机器人的运动控制中,需要考虑多个关节和执行器的运动,通过机械多体系统动力学的分析,可以确定各个关节的运动规律和相互作用,实现机器人的精确控制。
机械多体系统动力学是研究机械系统中多个刚体或弹性体的运动规律和相互作用的学科。
通过建立运动方程和采用模拟方法,可以深入研究机械多体系统的运动特性,为实际工程中的设计和控制提供理论基础。
在未来的发展中,机械多体系统动力学将继续发挥重要作用,推动机械工程和自动化技术的进步。
多自由度机械系统建模与动力学分析简介多自由度机械系统在工程中具有广泛的应用。
它由多个刚体组成,每个刚体可以沿着多个坐标轴进行运动。
对于这样的系统,建立准确的数学模型和进行动力学分析是非常重要的。
本文将介绍多自由度机械系统的建模方法和动力学分析。
一、刚体运动的描述在多自由度机械系统中,刚体的运动可以用欧拉角、角速度和角加速度来描述。
具体来说,一个刚体可以绕固定坐标轴的旋转和平动,因此需要考虑旋转和平动的自由度。
1. 旋转自由度欧拉角是描述刚体旋转的重要工具。
通常,一个刚体的旋转可以用绕固定坐标轴的三个角度(俯仰角、滚动角和偏航角)来描述。
欧拉角能够提供完全的刚体姿态信息,因此在多自由度机械系统的建模中广泛使用。
2. 平动自由度刚体的平动可以通过位置矢量来描述。
对于一个多自由度机械系统,每个刚体都有自己的位置矢量,从而描述其在空间中的运动。
二、多自由度机械系统的建模建立多自由度机械系统的模型是理解和分析系统行为的关键。
建模的过程可以通过使用拉格朗日方程和哈密顿原理来完成。
1. 拉格朗日方程拉格朗日方程是多自由度机械系统建模中的重要工具。
该方程基于拉格朗日函数,通过最小化系统的运动方程得到。
对于一个n自由度的系统,拉格朗日方程可以表示为:L = T - V其中,L是系统的拉格朗日函数,T是系统的动能,V是系统的势能。
通过对拉格朗日函数求导并应用欧拉-拉格朗日方程,可以得到系统的广义力和运动方程。
2. 哈密顿原理哈密顿原理是另一种用于建模多自由度机械系统的方法。
它基于变分原理,通过最小化系统的作用量来得到系统的动力学方程。
哈密顿原理可以表示为:δS = 0其中,S是系统的作用量,δ表示变分。
通过对作用量的变分,可以导出系统的广义力和运动方程。
三、多自由度机械系统的动力学分析动力学分析是研究多自由度机械系统运动规律和受力情况的过程。
它涉及到求解系统的运动方程和分析系统的稳定性。
1. 运动方程的求解多自由度机械系统的运动方程可以通过拉格朗日方程或哈密顿原理来求解。
学习结构动力学多自由度系统总结
多自由度系统是研究物体在动力学状态下位置和速度轨迹问题的重要研究内容。
按照受力方式不同,可以将多自由度系统分为加速度控制和力控制两类。
加速度控制的多自由度系统的特点是可以设计速度律和位置律,对物体的加速度进行控制。
而力控制的多自由度系统可以控制物体受到的力,使物体加速度,位置和速度达到指定估计值。
除了控制方式不同,多自由度系统还有另外一些特点:首先,多自由度系统可
以采用闭环控制,即先对系统的输出进行采样,再将抽样的输出与预定的跟踪值进行比较,从而调整输入;其次,多自由度系统也可以实现双向控制,即向被控对象和来自被控对象的双向信号控制;此外,多自由度系统可以实现混合控制,即通过混合不同的控制策略,进行加速度、力和角速度控制,以完成对多自由度机械系统位置及其状态控制。
此外,学习多自由度系统还要掌握建模方法,包括几何建模和动力模型建模等
两类方法。
几何建模主要包括多体约束模型,常用的约束模型包括Coulomb约束模型、Davenport约束模型和Hooke约束模型等等;动力模型建模包括拉格朗日模型
和Lagrange余量模型等等。
总的来说,学习多自由度系统的结构动力学重点在于掌握其加速度控制、力控
制以及闭环、双向控制和混合控制等控制方法,并能熟练操作几何建模和动力模型建模,进而分析预测多自由度系统的运动轨迹。
多自由度机械系统的动力学建模与控制随着科技的进步和人类对于机械系统日益增强的需求,多自由度机械系统的研究和应用变得越来越重要。
多自由度机械系统,顾名思义,指的是具有多个自由度的机械系统,即具备多个独立运动的能力。
在现实生活中,我们可以看到许多例子,如机器人、汽车引擎、航天器等。
这些机械系统的动力学建模与控制是确保其正常运行和性能优化的关键。
动力学建模是多自由度机械系统研究的第一步。
它是通过数学方法将机械系统的运动方程与物理参数相联系,以便后续的建模和控制分析。
在理论上,通过牛顿运动定律可以得到机械系统的运动方程。
然而,对于复杂的多自由度机械系统,这种方法往往会导致非常复杂的微分方程组,难以直接求解。
因此,研究人员通常使用拉格朗日或哈密顿力学等方法来简化模型。
在动力学建模中,一个关键的问题是确定机械系统的自由度数目。
自由度是指系统的独立运动能力,它可以用变量的数量来度量。
对于一个简单的单自由度机械系统,如一个简谐振子,自由度即为1。
但对于复杂的多自由度机械系统,如机器人的各关节,自由度可能会非常多。
确定自由度的数目可以帮助我们更好地理解系统的运动特性和性能。
确定了机械系统的自由度数目后,我们需要确定系统的广义坐标,以便对其进行建模。
广义坐标是描述系统状态和运动的变量,它们可以是位置、速度或其他与系统运动相关的变量。
通过选择适当的广义坐标,我们可以简化系统的运动方程,使得建模和控制更加方便。
除了动力学建模,控制是多自由度机械系统研究的另一个重要方面。
控制的目标是通过对系统施加输入信号来实现预期的输出响应。
对于多自由度机械系统,控制是一个更加困难的任务,因为系统的复杂性和非线性。
然而,通过合理的控制策略和技术,我们可以实现对多自由度机械系统的精确控制。
在实际应用中,控制多自由度机械系统的一种常用方法是采用迭代学习控制算法。
迭代学习控制算法是一种基于模型无关的自适应控制方法,它通过反复迭代来不断调整控制输入,以实现系统的稳定和性能优化。
多自由度机械系统的运动分析与控制在现代工程领域中,多自由度机械系统的应用日益广泛,从复杂的工业机器人到精密的航空航天设备,从汽车的悬挂系统到医疗设备的运动机构,都离不开对多自由度机械系统的深入研究。
对这类系统的运动分析与控制是实现其高效、精确和可靠运行的关键。
多自由度机械系统,简单来说,就是由多个能够相对运动的部件组成,每个部件的运动都会相互影响,从而形成一个复杂的整体运动。
要理解和掌握这样的系统,首先需要对其运动学和动力学特性进行分析。
运动学分析主要关注系统中各个部件的位置、速度和加速度之间的关系,而不考虑引起这些运动的力。
在多自由度机械系统中,这往往涉及到复杂的数学模型和计算。
以一个简单的机械臂为例,它可能由多个关节和连杆组成。
要确定机械臂末端执行器在空间中的位置和姿态,就需要通过一系列的坐标变换和矩阵运算来求解。
这不仅需要扎实的数学基础,还需要对机械系统的结构有清晰的认识。
动力学分析则更进一步,它考虑了作用在系统上的力和力矩以及由此产生的运动。
这对于设计控制系统、预测系统的性能以及优化系统的结构都至关重要。
例如,在设计一个用于搬运重物的机械手臂时,必须了解手臂在承受不同重量和运动状态下所受到的各种力和力矩,以确保其结构强度和稳定性,同时也为控制算法的设计提供基础。
在对多自由度机械系统进行运动分析之后,接下来就是控制的问题。
控制的目标是使系统按照预定的轨迹和性能要求运动。
常见的控制方法包括经典控制、现代控制和智能控制等。
经典控制方法,如 PID 控制,以其简单易懂和实用性在工业中得到了广泛的应用。
PID 控制器通过对误差(实际输出与期望输出之间的差异)的比例、积分和微分运算来调整控制输入,从而使系统的输出接近期望的值。
然而,对于多自由度机械系统这样的复杂对象,经典控制方法往往难以达到理想的控制效果,特别是当系统存在非线性、时变和不确定性等因素时。
现代控制理论,如状态空间法和最优控制,为多自由度机械系统的控制提供了更强大的工具。
机械系统的动力学特性分析与优化一、引言机械系统是工程领域中非常重要的一类系统,在各个行业中都有广泛应用。
机械系统的动力学特性对系统性能和工作效率有着重要影响。
因此,对机械系统的动力学特性进行深入分析和优化是提高系统运行效率的关键。
二、机械系统的动力学特性机械系统的动力学特性是指在外界作用下,机械系统所表现出来的力、速度、加速度等物理量的变化规律。
了解机械系统的动力学特性,可以帮助我们理解系统的工作原理、优化系统结构和改进系统性能。
1. 自由度机械系统的自由度指的是系统中独立的运动模式个数。
自由度越高,系统的运动模式越多。
自由度的确定对于机械系统的动力学特性分析至关重要。
2. 动力学模型机械系统的动力学模型是描述系统动态行为的数学方程。
通常采用拉格朗日方程或哈密顿方程等方法建立动力学模型。
通过动力学模型,可以推导出系统的运动方程,得到系统的运动规律。
3. 频率响应频率响应是指机械系统在外界激励下的响应情况。
通过频率响应分析,可以了解系统对不同频率激励的反应特性。
频率响应对于系统的稳定性和性能具有重要影响。
三、机械系统动力学特性的影响因素机械系统的动力学特性受多种因素影响,正确理解这些因素对系统优化至关重要。
1. 结构参数机械系统的结构参数对其动力学特性具有重要影响。
例如,系统的质量分布、刚度和阻尼等参数会直接影响系统的固有频率、振动模态和能量损耗。
2. 外部激励机械系统在运行过程中会受到外界激励的作用,如震动、冲击和噪声等。
外部激励对于机械系统的动力学特性产生明显影响,需要对外部激励进行合理分析和控制。
3. 传动装置机械系统的传动装置(如齿轮、带传动等)会引入非线性因素,对系统的动力学特性产生重要影响。
需要考虑传动装置的刚度、阻尼、摩擦等因素,以实现系统的稳定运行。
四、机械系统动力学特性的优化方法针对机械系统的动力学特性进行优化,可以提高系统的运行效率、降低能耗和提升系统的稳定性。
下面介绍几种常见的优化方法。
机械系统动力学内容简介课程编号:B0200013C 课程名称:机械系统动力学英文译名:Dynamic Analysis of Mechanical System适用学科:机械设计及理论机械制造及其自动化机械电子工程先修课程:机械振动开课院(系):机电工程学院机械设计系任课教师:陆念力(教授)、陈照波(教授)、焦映厚(教授)、兰朋(副教授)内容简介:机械动力学是一门研究机械在力作用下的运动和机械在运动中产生的力的科学。
在机械动力学发展过程中先后产生了并存在着四种不同水平的分析方法,即静力分析、动态静力分析、动力分析和弹性动力分析方法。
前三种分析方法中,构件均被假定为刚性,第四种分析方法计入了构件的弹性,以提高设计分析的精度。
本教程中,机械动力学划分为机械刚体动力学和机构弹性动力学两大部分。
在机械刚体动力学部分将介绍机构的动态静力分析、连杆机构的平衡、机械系统动力学分析。
在机械弹性动力学部分将介绍回转机械的振动问题,连杆机构弹性动力学和机械系统弹性动力学。
本课程还将介绍一些有关的多柔体系统动力学分析理论与方法。
主要教材:1.《机械动力学》张策编著高等教育出版社2000年4月2.《柔性多体系统动力学》陆佑方高等教育出版社1996年7月3.《高等动力学》毕学涛高等教育出版社1994年12月参考文献:1.《弹性连杆机构的分析与设计》张策机械工业出版社1997年8月2.《计算多体系统动力学》洪嘉振高等教育出版社1999年7月机械系统动力学教学大纲课程编号:B0200013C课程名称:机械系统动力学开课院系:机电工程学院机械设计系任课教师:陆念力、陈照波、焦映厚、兰朋先修课程:机械振动适用学科范围:机械设计及理论、机械制造及其自动化、机械电子工程学时:36 学分:2开课学期:春开课形式:讲授+辅导课程目的和基本要求:随着机械系统的复杂化、高速化、精密化、柔性化,对机械系统动力学分析精度提出了更高的要求,本课程着重培养学生对复杂机械系统动力学建模及分析的能力。
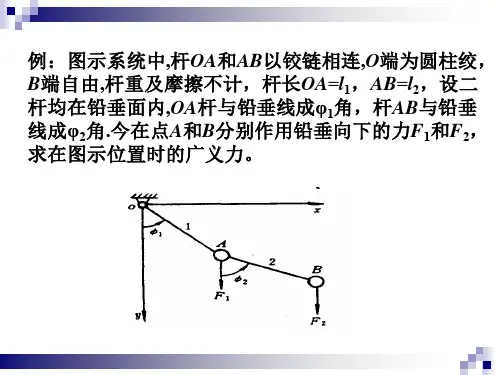
§2 多自由度机械系统的动力学分析i i i i F q Uq E q E te d d =∂∂+∂∂-⎪⎪⎭⎫ ⎝⎛∂∂ ),,2,1(N i =一、拉格朗日方程机械系统的动力学方程-外力与运动参数(位移、速度等)之间的函数关系式:动能势能自由度广义坐标广义力广义速度☐以能量观点来研究机械系统的真实运动规律;☐解决具有理想约束的机械系统动力学问题的普遍方程;☐求解步骤规范、统一(确定广义坐标,列出动能、势能和广义力的表达式,代入上式即可);☐方程中不含未知的约束反力,克服了牛顿第二运动定律的缺点。
i i i i F q U q E q E te d d =∂∂+∂∂-⎪⎪⎭⎫ ⎝⎛∂∂ ),,2,1(N i =二、二自由度机械系统的动力学分析11ϕ=q 42ϕ=q⎪⎪⎭⎪⎪⎬⎫=∂∂-⎪⎪⎭⎫ ⎝⎛∂∂=∂∂-⎪⎪⎭⎫ ⎝⎛∂∂2e 221e 11d d d d F q E qE tF q E q E t 若不计运动构件的重量与弹性,则势能 U 不必计算。
1. 系统动能的确定∑=+=nj j S S j j j J v m E 122)(21ω⎪⎭⎪⎬⎫===),(),(),(212121q q y y q q x x q q j jj j S S S S j j ϕϕ),,2,1(n j =⎪⎭⎪⎬⎫+=∂∂+∂∂=222211j j jS S S jjj y xv qq q q ϕϕω多自由度机械系统的动力学分析系统动能的求解步骤:☐位移分析☐速度分析☐系统动能2222211221112121q J q q J q J E ++=⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫ ⎝⎛∂∂∂∂+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛∂∂∂∂+⎪⎪⎭⎫⎝⎛∂∂∂∂=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫ ⎝⎛∂∂+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫⎝⎛∂∂=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫ ⎝⎛∂∂+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫⎝⎛∂∂=∑∑∑===n j j j S S S S S j n j j S S S j nj j S S Sj q q J q y q y q x q x m J q J q y q x m J q J qy q x m J j j j j jj j jj jj121212112122222222121212111ϕϕϕϕ多自由度机械系统的动力学分析☐等效转动惯量2. 广义力的确定∑∑==∂∂+⎪⎪⎭⎫ ⎝⎛∂∂+∂∂=m k i kk lj i j jy i j jx iq M q y F q x F F 11e ϕ)2,1(=i 22e 11e δδδq F q F W +=22e 11e q F qF P +=多自由度机械系统的动力学分析3. 动力学方程2111111112211212212222121212111212221122222212221212121212e e J J J q J q q q q q q J J q F q q J J J q J q q q q J J q q q F q q ∂∂⎫+++⎪∂∂⎪⎪⎛⎫∂∂+-=⎪ ⎪∂∂⎪⎝⎭⎬⎛⎫∂∂⎪++- ⎪⎪∂∂⎝⎭⎪⎪∂∂++=⎪∂∂⎭求解二阶非线性方程组,获得广义坐标q 1 与 q 2 ,进而获得二自由度机械系统的真实运动规律。