智能车路协同系统-(北航王云鹏)
- 格式:ppt
- 大小:17.80 MB
- 文档页数:10
车路协同环境下的交通工程王云鹏;鲁光泉;于海洋【摘要】交通工程的产生与发展始终围绕着交通系统中的人车路耦合关系,来实现高效、安全、绿色的目标.载运工具智能化和车路/车车互联推动了车路协同技术的发展,将使交通系统逐渐从车路协调走向车路协同,并进一步提升交通系统的效能与安全.在车路协同环境下,传统交通系统中人为因素弱化,人车路耦合性增强,系统可控可测,随机性减弱,系统的感知、决策及控制主体逐渐从驾驶人转向机器,这给传统交通工程的基础理论方法带来了诸多变化与挑战.本文主要从人车路耦合的角度重点探讨车路协同系统对交通工程的影响,并提出未来发展过程中亟需解决的科学问题.%The development of transportation engineering is performed with a focus on the coupling between human, vehicles, and roads to improve the level of efficiency, safety, and environmental friendliness. Technologies associated with the cooperative vehicle infrastructure system (CVIS), which is based on the concepts of intelligent vehicles and V2V and V2I communication, will cause the transportation system configuration to gradually change from human-vehicle-road coordination to vehicle-infrastructure cooperation, thereby greatly improving traffic efficiency and safety. Under the CVIS environment, conventional human factors affecting traffic have less influence, and the coupling of human-vehicle-road is enhanced; thus, the systems can be controlled and evaluated effectively, and the randomness in traffic systems can be reduced. The processes of perception, decision-making, and control are performed by robots instead of humans, and this could lead to numerous changes and challenges tothe theory of transportation. This paper discusses the in-fluence of CVIS on transportation engineering, and the associated scientific issues.【期刊名称】《中国工程科学》【年(卷),期】2018(020)002【总页数】5页(P106-110)【关键词】交通工程;车路协同;发展趋势【作者】王云鹏;鲁光泉;于海洋【作者单位】北京航空航天大学交通科学与工程学院,北京 100083;北京航空航天大学交通科学与工程学院,北京 100083;北京航空航天大学交通科学与工程学院,北京 100083【正文语种】中文【中图分类】U491.2一、前言传统的智能交通系统通过“感传知用”实现交通要素一体化集成,是道路交通有序运行的重要保障。
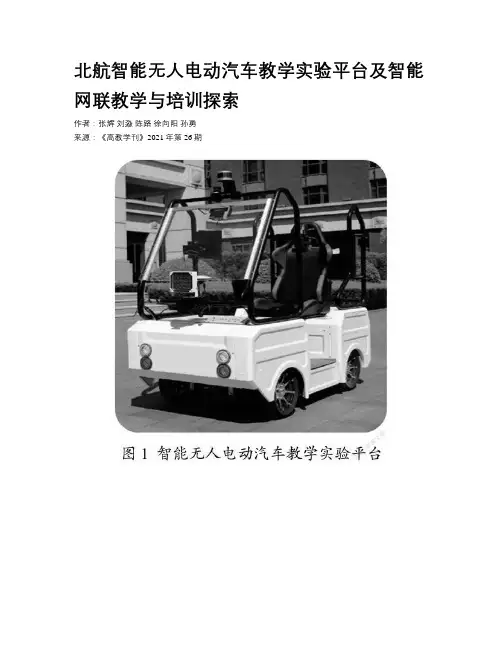
北航智能无人电动汽车教学实验平台及智能网联教学与培训探索作者:张辉刘淼陈路徐向阳孙勇来源:《高教学刊》2021年第26期摘要:近年来,国家政策的大力支持和互联网造车热潮引发对无人驾驶专业领域的巨大人才需求,也对智能网联人才培养提出新的挑战,迫切需要智能网联教育设备和新的教育体系。
在此背景下,北京航空航天大学交通科学与工程学院和机械工程及自动化学院联合设计了一款“智能无人电动汽车教学实验平台”,并基于此平台开发了一套完整的智能网联汽车功能开发、检测与运维培训体系和课程课件。
实验平台功能完善且安全可靠,已成功用于北京航空航天大学交通科学与工程学院相关课程教学和实验当中。
同时,实验平台成为中德诺浩(北京)教育科技股份有限公司智能网联“1+X”证书师资培训的指定实验教具,取得较好的社会效益。
关键词:智能网联汽车;实验平台;培训体系中图分类号:G642 文献标志码:A 文章编号:2096-000X(2021)26-0010-05Abstract: In recent years, the strong support of national policies and the upsurge of building cars on the Internet have triggered a huge demand for talents in the field of autonomous driving. It also poses new challenges to the training of intelligent networked talents, and there is an urgent need for intelligent networked education equipment and new education support. In this context, the School of Transportation Science and Engineering and the School of Mechanical Engineering and Automation of Beihang University jointly designed an "intelligent unmanned electric vehicle teaching experiment platform" and developed a complete set of design, test and operation and maintenance training systemof intelligent connected vehicles based on this platform. The experimental platform is fully functional, safe and reliable, and has been successfully used in the teaching and experimentation of related courses in the School of Transportation Science and Engineering of Beihang University. At the same time, the experimental platform has become the designated experimental teaching tool for Sino-German Knowhow (Beijing) Education Technology Co.,Ltd.'s intelligent network connection "1+X" certificate teacher training, and has achieved good social benefits.Keywords: intelligent connected car; experimental platform; training system近年來,全球汽车产业变化非常迅速。
科学技术创新2020.331研究背景“WR 驾驶”是伴随5G 、大数据、人工智能等新一轮技术发展所衍生的一项前沿科技。
U b e r 已使用WR 驾驶智能物流大卡在亚利桑那州全境送货。
苏宁、京东等国内电商企业也相继推出了其L4级别完全无人重卡研发计划。
我国目前在无人驾驶技术上已经颇有成就,车辆线控技术的发展成熟为WR 驾驶奠定了技术基础,车辆动态执行机构动力学由多个电控单元控制,控制元素分布在控制单元(ECU )及执行模块中,并具备高可靠性及可用性。
2设计原理图1系统流程无人驾驶智能物流大卡的目标是L4级WR 驾驶,当前WR 驾驶物流卡车是感知、决策+互联、执行三个系统的高效配合来实现WR 驾驶。
此方案,多传感器的融合技术、人工智能深度学习技术、视觉分析系统技术、车联网技术、决策规划技术、线控改造技术、高精度定位技术、高精度GIS 地理信息技术、车况诊断技术以及天气路况预测技术等都是需要突破。
最重要的,WR 驾驶的实现要依赖于特殊场景进行针对性的开发落地和道路基建设计。
2.1WR 驾驶智能物流大卡道路基建设计建设WR 驾驶智能物流大卡物流专用车道,要能够实现车路协同和自动驾驶。
通过云计算、大数据和物联网、人工智能等新一代互联网技术融合,实现对车道透彻全面、实时准确的感知,掌握每段路、每辆车和每个结构物的现状并精准预测发展趋势,这些感知到的数据要通过稳定、大带宽高速公路通信专网进行传输。
道路设施建设内容包括以下几个方面:设置WR 驾驶专用车道;沿线部署高速率、低延时、高可靠的全覆盖网络;加强泛在综合感知设施装备的布设,满足车路协同式自动驾驶需求;服务区建设太阳能产能系统,部署电动汽车充电桩。
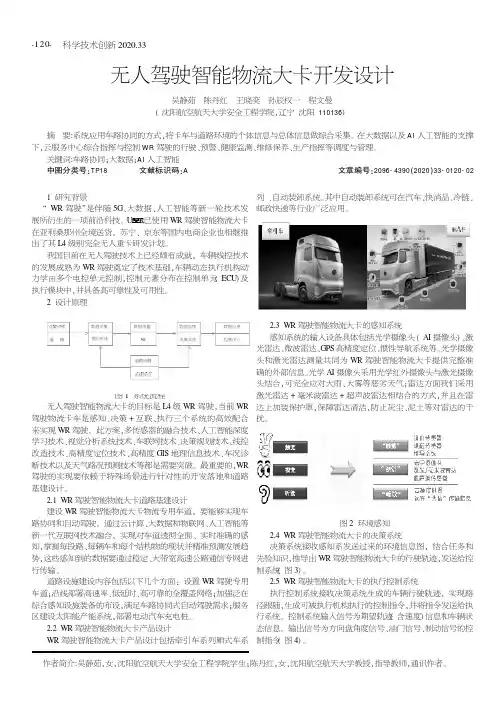
2.2WR 驾驶智能物流大卡产品设计WR 驾驶智能物流大卡产品设计包括牵引车系列厢式车系列、自动装卸系统。
其中自动装卸系统可在汽车、快消品、冷链、邮政快递等行业广泛应用。
2.3WR 驾驶智能物流大卡的感知系统感知系统的输入设备具体包括光学摄像头(AI 摄像头)、激光雷达、微波雷达、GPS 高精度定位、惯性导航系统等。
车路协同系统发展现状综述作者:王虎魏岗来源:《城市建设理论研究》2013年第23期摘要本文首先介绍了车路协同系统的概念及内涵,然后针对不同国家不同时期不同道路交通情况,对车路协同系统的发展状况进行了阐述。
在总结车路协同系统的特点基础上,对我国车路协同未来的发展进行了展望。
关键词:智能交通运输系统(ITS);车路协同系统(CVIS);主动交通安全;综述中图分类号:C913.32 文献标识码:A 文章编号:引言智能交通运输系统(ITS)是目前世界交通运输领域的前沿领域,已成为世界各国极力投注资源推动的重点之一,在美国、日本及欧盟等众多先进国家尤其受到重视,被认为是提高道路交通的可靠性、安全性和减少环境污染的有效手段之一[1-2]。
车路协同系统(CVIS)是基于先进的传感和无线通讯等技术的,能够实现车车、车路动态实时信息交互,完成全时空动态交通信息采集和融合,从而保障在复杂交通环境下车辆行驶安全、实现道路交通主动控制、提高路网运行效率的新一代智能交通系统[3-4]。
国内外车路协同系统发展情况美国美国车路协同系统(VII)是由美国联邦公路局、AASHTO、各州运输部、汽车工业联盟、ITS American等组成的特殊联合机构,通过信息与通信技术实现汽车与道路设施的集成。
美国对车路协同相关技术研究的发展历程两阶段。
第一阶段上世纪90年代到上世纪末,主要特点为研究的范围全而广,研究领域涉及交通监控、交通信号智能控制、不停车收费、自动驾驶等领域。
第二阶段从本世纪开始,由第一阶段的“全面开展研究”转向“重大专项研究”。
这期间主要有智能车辆计划IVI计划、车辆—基础设施集成项目(VII)[5]、商用车辆安全计划、CICAS、IVBSS等项目。
日本日本ITS技术研究历程也经历了战略性的变化,可以分为两个阶段。
第一阶段集中在上世纪90年代,研究领域虽然涉及交通安全辅助、导航系统高度化、电子收费(ETC)、交通管理优化、道路管理效率化、公共交通支援、卡车效率化、行人辅助、紧急车辆的运行辅助等方面。
北京航空航天大学科技成果——智能车路协同系统及运行监管平台成果简介近年来伴随着交通环境感知、交通风险预估评价、车路协同控制技术的飞速发展,自动驾驶技术逐步成熟,已经突破瓶颈进入到了高速发展期。
但在自动驾驶汽车真正普及上路前,一些问题仍待解决。
比如,自动驾驶的网络安全性没有得到充足保障,因建设等原因导致的城市道路规划和布局变化,以及相关的法规政策及测试标准不完善,复杂的交通形势(混合交通、不遵守交通规则、各种标识不完善等等)等,对自动驾驶技术是严峻的考验。
因此,亟需建设智能车路协同系统及运行监管平台,以配合智能网联汽车检测基地建设的迅猛开展。
本项目将对自动驾驶车辆及路边基础设施进行升级改造,结合示范区车路协同示范、辅助驾驶示范等场景,为示范区提供智能汽车信息服务管理系统和大数据监管平台,为我国自动驾驶产业发展提供必要的公共服务,有助于智能网联汽车产业创新技术发展,加快推动制造业向智能制造转型升级。
技术描述本项目主要包括对自动驾驶车辆,以及普通道路、十字交叉路口的基础设施进行信息化升级改造,搭建综合数据平台,建设满足智能网联汽车示范应用需求的车路协同系统,建设车路协同示范、智慧交通综合应用示范等多个示范场景。
核心功能包括事故分析、车辆智能化水平评价、驾驶员监督和车辆远程预警四项。
车路协同部分:通过对自动驾驶测试示范区域现有道路、路边基础设施和交通信号系统的改造,以及通信网络的部署,构建典型的实际交通测试环境并配套智能网联设施,在开放式的测试场地,实现智能网联车测试的智能化和标准化。
将国内各地已通过试验场测试的技术,在示范区进行实地测试与示范,最终实现智能车辆的V2X应用场景试验。
完成道路示范区域若干个部署点的感知、传输、边缘服务器、信号控制系统的部署,完成前端系统建设。
通过安装V2X车载终端和车载显示终端实现智能网联车辆改造,进行网联汽车各种试验场景的测试。
通过前端系统及场景应用系统间协作配合,实现车-人、车-路、车-车等应用场景。

基于Web Services的计算机辅助协同设计体系结构
王云鹏;雷毅;潘翔;郭学旭
【期刊名称】《计算机应用研究》
【年(卷),期】2004(021)002
【摘要】在分析基于简单客户机/服务器和基于中间件这两种体系结构的基础上,提出了基于Web Services、松散耦合的CACD体系结构模型及原型系统.通过与其他体系结构的比较,证明基于Web Services的体系结构综合性能最好,是开发企业间大规模计算机辅助协同设计系统的新思路.
【总页数】4页(P44-46,114)
【作者】王云鹏;雷毅;潘翔;郭学旭
【作者单位】北京航空航天大学,机械工程及自动化学院,北京,100083;北京航空航天大学,机械工程及自动化学院,北京,100083;北京航空航天大学,机械工程及自动化学院,北京,100083;北京航空航天大学,机械工程及自动化学院,北京,100083
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Web Services的协同设计服务管理中心功能设计 [J], 王能建;陈宝岩;刘钦辉;吕磊
2.基于Web Services的电子口岸体系结构探讨 [J], 李恩恩;褚英双
3.基于Web Services的电力自动化体系结构 [J], 关均康;谭文展
4.基于Web Services的PDM文档管理系统的体系结构设计 [J], 龚茜茹
5.基于Web Services和Agent的协同设计技术研究与系统实现 [J], 高振清;程光耀;吴琼
因版权原因,仅展示原文概要,查看原文内容请购买。
国内外车路协同系统发展现状综述国the United States’ IntelliDriveSM, the European Union’ eSafety, JapaneseSmartway and our collaborative development of the carriageway. And the same time,it makes the future development of the CVIS in our coubtry. Key words:IntelligentTransportation Systems; Cooperative Vehicle nfrast-ructure System; IntelliDriveSM引言智能交通运输系统(Intelligent Transportation Systems,ITS)是目前世界交通运输领域的前沿领域,已成为世界各国极力投注资源推动的重点之一,在美国、日本及欧盟等众多先进国家尤其受到重视,被认为是提高道路交通的可靠性、安全性和减少环境污染的有效手段之一。
车路协同系统(Cooperative Vehicle-Infrastructure System,CVIS)是基于无线通信、传感探测等技术进行车路信息获取,通过车车、车路信息交互和共享,实现车辆和基础设施之间智能协同与配合,达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标[1]。
图1 车路协同系统[2]近年来,电子信息和无线通信技术的迅速发展与应用,推动了车路协同系统(CVIS)的发展。
其作为ITS的重要子系统也备受国内外科研人员关注,是世界交通发达国家的研究、发展与应用热点。
1 国内外车路协同1.1 美国IntellidriveSM美国车路协同系统(Vehicle Infrastructure Integration,VII)是由美国联邦公路SHTO、各州运输部、汽车工业联盟、ITS American等组成的特殊联合机局、AA 构,通过信息与通信技术实现汽车与道路设施的集成,并以道路设施为基础,计划于2005年推出可以实施的产品。
Automobile Parts 2012.06036零部件论坛国内外I T S 系统发展的历程和现状北京航空航天大学教授 王云鹏交通系统是一个典型的复杂系统,依靠传统的交通管理方产品和庞大的产业;SmartWay 计划将建立“安全•安心的汽车社式,单从道路和车辆的角度考虑,很难解决近年来不断恶化的交通会”作为最优先解决的课题,目前已进入技术普及阶段,2005—拥堵、事故频发、环境污染等问题。
基于车车、车路信息交互建立2010年期间围绕 5 个重点展开研究,其中包括车路间协调系统、智人、车、路一体的车路协同系统,对提高交通运输系统的效率和安能汽车系统等;从2005年开始AHS 进入其实用化技术普及的第2阶全性,实现交通系统的可持续性发展具有十分重要的意义。
车路协段,计划2010年后,重点加强利用无线通讯技术的车车、车路间协调同技术已经成为当今国际智能交通领域的前沿技术和研究热点,欧系统实用化技术的研发,构筑人车路一体化的高度紧密的信息网络,美等发达国家都在积极推进相关技术的研究。
适时开展车路协同系研发交通对象协同式安全控制技术。
统研究,突破车路协同智能控制关键技术,抢占智能交通前沿技术自1986年以来,西欧国家主要是在“欧洲高效安全交通系统计制高点,是未来我国能否形成智能交通产业核心竞争力的关键,对划(PROMETHEUS )”和“保障车辆安全的欧洲道路基础设施计划实现城市交通现代化管理、创造可持续发展的交通环境,具有重要(DRIVE )”两大计划指导下开展交通运输信息化领域的研究、开发意义。
与应用。
之后在第10届ITS 世界大会上,欧洲ITS 组织ERTICO 最先提目前,智能交通技术正在从单个交通要素的智能化向交通要出eSafety 基本概念,得到欧盟委员会认可并列入欧盟的计划,素一体化的方向发展,车路协同技术正成为当前各国智能交通系统eSafety70余项研发项目,都将车路通信与协同控制作为研究重点之发展的重点。
车路协同十年路:初心与三个设想车路协同十年已经记不清第一次听到车路协同这个专有技术名词是什么时候了,但笔者翻查了一下,ITS114网站最早有关车路协同的报道是在2012年,杂志最早有关车路协同的报道,也是在2012年,这一年,采访了科技部"十二五"863主题项目"智能车路协同系统关键技术"首席专家、清华大学教授姚丹亚、中科院自动化所复杂系统管理与控制国家重点实验室主任王飞跃,翻译报道当年ITS世界大会上宝马在会上做车路协同技术演示,此外,当时科技部发文称“车路协同系统有助于有效缓解交通危机”……实际上,国内车路协同研究早在北京奥运会之后就已启动,2011年11月开始,以清华大学为牵头单位的科研团队在十二五863计划的支持下,围绕车路协同关键技术开展了系统性的探索研究,有效地推动了我国智能车路协同技术发展。
自2011年863项目启动,车路协同发展到2021年,刚好十年(车路协同发展十年大事件附在文后)。
对于一个技术而言,十年时间很短,但对于技术产业化而言,十年很长。
在这十年里,车路协同被淹没在智慧高速、智慧公路、自动驾驶、智能网联等更新的概念和应用场景中,车路协同被提及,往往是因为自动驾驶,因为“协同智能”,好像车路协同只能通过自动驾驶场景,才有应用价值。
第十六届中国智能交通年会暨2021中国智能交通大会期间,有多个车路协同、智慧公路、智能网联相关的主题论坛,对这十年车路协同技术应用的发展做了全面的总结,同时也介绍了很多前沿研究,ITS114前往学习并聆听了诸位教授、专家的报告,得以整理这十年车路协同发展现状和问题,从而结合ITS114对行业的理解,对车路协同如何破局提出三个不成熟的设想,供大家交流和批判。
车路协同的初心姚丹亚教授在第十六届中国智能交通年会暨2021中国智能交通大会上的演讲中,提及如何推广车路协同技术,就强调了一点,要回归初心。
车路协同技术应用的初心是什么?也就是说我们当初为什么要研究车路协同?车路协同能解决什么问题?按姚丹亚教授的话,就是为了提升交通安全,安全和效率是交通永恒的发展目标,安全是效率的前提。
基于多智能体强化学习的车队协同系统随着科技的不断进步和智能交通系统的发展,车队协同系统逐渐成为了车辆行驶领域的关键技术之一。
在交通拥堵现象严重的城市,车队协同系统不仅可以提高车辆的运输效率和安全性,还可以减少交通事故和排放量,对交通运输领域具有重要意义。
多智能体强化学习作为车队协同系统的一种重要技术,已经在该领域取得了显著的成果。
它基于智能体之间的协同学习和决策,使得车队能够在复杂的交通环境中高效地协同行驶。
首先,车队协同系统通过智能体之间的通信与协调,实现了车辆之间的信息共享和合作。
每一辆车都可以通过传感器获取到周围车辆和交通环境的信息,并将这些信息传输给其他智能体。
通过共享信息,车队可以共同制定行驶策略,避免重复操作和冲突,提高车队整体的运输效率。
其次,多智能体强化学习使得车辆能够通过学习与优化来提高自身的行驶策略。
每辆车都可以通过环境的奖励机制和反馈信号,通过强化学习算法不断调整自身的策略和行为,以适应不同的交通状况和目标要求。
例如,在高峰期的拥堵路段,车辆可以学习到选择绕行路线来避开拥堵的策略。
此外,车队协同系统还可以通过智能体之间的合作学习来提高整个车队的运输效能。
车辆之间可以相互感知和理解彼此的行为,通过共同的学习和协调,车队可以形成一种集体智能,提高车队的整体性能。
例如,当一辆车检测到交通拥堵时,它可以向其他车辆传输这一信息,其他车辆可以根据这一信息来调整自己的行驶策略,从而减少车辆之间的阻塞和排队。
总之,基于多智能体强化学习的车队协同系统在提高车辆运输效率和安全性方面具有巨大优势。
它通过智能体之间的协同学习和决策,实现了车辆之间的信息共享和合作,使得车队能够在复杂的交通环境中高效地协同行驶。
未来,随着技术的不断发展和智能交通系统的完善,多智能体强化学习的车队协同系统将会得到更广泛的应用和推广。