高压带电作业自动剥皮器控制系统的研制
- 格式:pdf
- 大小:251.41 KB
- 文档页数:4

《高压润滑拉拔机工艺分析与控制系统设计》篇一一、引言随着现代工业的快速发展,高压润滑拉拔机作为金属材料加工的重要设备,其工艺与控制系统的设计对于提升生产效率、保证产品质量及降低能耗具有重大意义。
本文将详细分析高压润滑拉拔机的工艺流程,并对其控制系统设计进行深入探讨。
二、高压润滑拉拔机工艺分析1. 工艺原理高压润滑拉拔机主要通过高压润滑油的作用,使金属材料在模具中受到压力,从而实现金属的拉拔加工。
这一过程涉及材料的塑性变形、润滑条件的控制以及温度的调节等多个方面。
2. 工艺流程(1)原料准备:选择合适的金属材料,并进行必要的预处理。
(2)润滑处理:通过高压润滑系统对金属材料进行充分润滑。
(3)拉拔加工:将润滑后的金属材料放入模具中,通过拉拔机进行拉拔加工。
(4)质量检测:对加工后的金属材料进行质量检测,确保产品合格。
三、控制系统设计1. 设计要求高压润滑拉拔机的控制系统设计应满足以下要求:操作简便、控制精确、安全可靠、节能环保。
2. 控制系统架构控制系统采用模块化设计,主要包括主控制器、输入模块、输出模块、传感器模块以及通信模块等。
主控制器负责整个系统的协调与控制,各模块之间通过通信模块进行信息交互。
3. 控制策略(1)压力控制:通过调节润滑系统的压力,确保拉拔过程中压力的稳定。
(2)速度控制:根据拉拔机的实际工作情况,合理设置拉拔速度,保证生产效率与产品质量。
(3)温度控制:通过温度传感器实时监测拉拔过程中的温度变化,并采取相应措施进行调节。
(4)故障诊断与保护:通过设置故障诊断模块,实时监测系统运行状态,一旦发现故障,立即启动保护措施,确保设备安全。
4. 软件设计软件设计是控制系统设计的关键部分,主要包括人机交互界面设计、控制算法设计以及故障诊断与保护程序设计等。
人机交互界面应简洁明了,方便操作;控制算法应具有较高的精确性与稳定性;故障诊断与保护程序应能够快速准确地发现并处理故障。
四、实施与展望1. 实施步骤(1)对现有设备进行评估与改造,以满足新工艺与控制系统的需求。
开题报告自动剥线机的控制系统设计摘要:随着自动控制理论和PLC技术的发展,PLC控制技术具有使用方便,功能强大,可靠性高,扩展能力强,适用性广,组成控制系统简单等优点。
使用越广泛。
本论文基于PLC的剥离机控制系统项目和基于PLC的剥离机控制系统项目。
目为背景,从 PLC 控制系统设计的角度,探讨 PLC 控制技术的应用,完成了如下几项工作:(1)综述了PLC控制技术和其他控制技术的国内外应用的生产,开发,应用现状,介绍了剥线机控制系统和剥线机控制系统两个项目的来源、背景、国内外研究现状、研究意义。
(2)探讨了广泛适用的基于 PLC 的控制系统设计的一般方法。
从 PLC 控制系统的组设计和设计原理的分析从分析PLC控制系统的硬件设计和软件设计方法和步骤开始。
(3)实现了基于PLC的剥线机控制系统的设计,包括系统的总体设计,硬件设计和控制软件设计。
在该系统的总体设计中,提出了一种用于多截面剥离的线径加工方法,并分析了线径检测。
计算原理;硬件设计包括PLC设备选择,I / O分配,PLC接线图,线径检测器,仿真量输入模块、伺服放大器等内容;软件的设计包括多个模块的 PLC 程序的设计、多个画面的人机界面的设计。
(4)完成了基于 PLC 的剥线机控制系统的设计,包括系统的总体设计、硬件设计和软件设计。
在系统的总体设计中,分析了步进电机脉冲计算的原理,并采用了步进速度。
度曲线控制步进电机加减速运动的控制方法;硬件设计包括减少PLC输入点的数量设计、PLC 设备选型、I/O 分配、PLC 接线图、步进电机等内容;软件的设计主要是 PLC该程序的设计包括主程序,两级剥离模块,三级剥离模块,功能按钮模块和数字按钮输入模块。
基于 PLC 的剥线机控制系统,经过一年多的生产运作,结果表明系统稳定,可靠,加工金属细线质量好,根据厂家的鉴定,其性能指标已达到国外同类产品的技术水平。
基于PLC的剥离机控制系统已进入后期调试和改进阶段,系统有望实现。

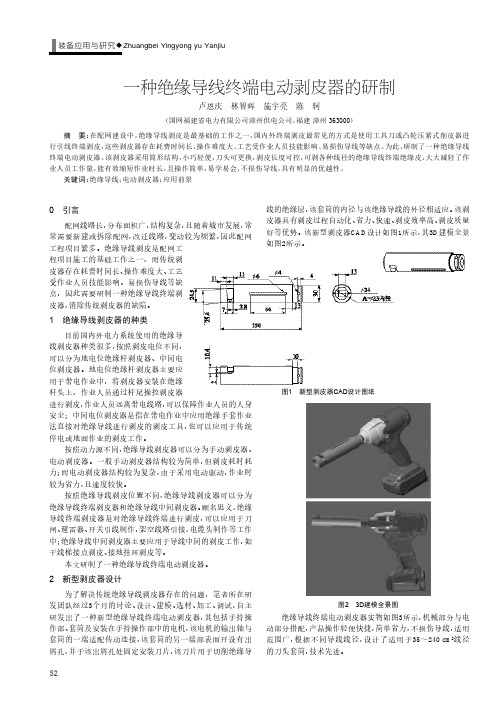
手动10kv绝缘线带电剥皮器内部结构
手动10kv绝缘线带电剥皮器是一种专门用于剥去高压电线绝缘层的工具。
它能够剥除各种电力设备和电气设备中的电线绝缘层,确保电线的良好导电性能。
手动10kv绝缘线带电剥皮器的内部结构主要包括以下几个部分:
1.手柄:手柄是整个剥皮器的控制装置,它通常由抗电击材料制成,以确保剥皮器的安全操作。
手柄通常设计成人体工程学原理,能够提供舒适的握持。
2.剥皮刀:剥皮刀是剥皮器的核心零件,它通常由高强度合金材料制成,能够在带电状态下剥去绝缘层。
剥皮刀通常是可调节的,可以根据不同的电线直径进行调整,确保剥皮的准确性和安全性。
3.绝缘套:绝缘套是用来保护剥皮刀的一种装置,通常由柔软的绝缘材料制成,如橡胶或塑料。
绝缘套能够防止剥皮刀与电线直接接触,降低电击的风险。
4.弹簧:弹簧是一种用于控制剥皮刀的装置,它能够确保剥皮刀的平稳运动并保持良好的剥皮效果。
弹簧通常位于剥皮刀和手柄之间,通过受力变形来实现剥皮动作。
5.固定螺钉:固定螺钉是用来固定剥皮刀和其他零件的一种装置,它通常位于剥皮器的底部。
固定螺钉能够防止剥皮刀在操
作过程中脱离或松动,确保剥皮器的工作稳定性和安全性。
手动10kv绝缘线带电剥皮器的内部结构设计合理,能够提供高效、安全和可靠的剥皮操作。
但是,在使用过程中仍需严格按照操作规程和安全操作规范进行操作,以避免事故的发生。

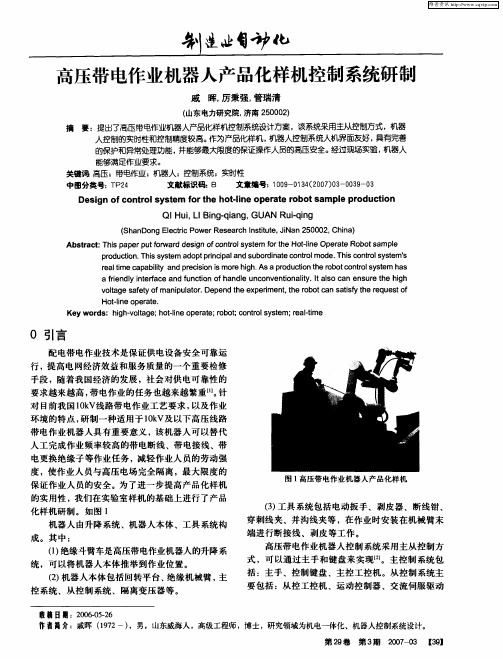
配电带电作业机器人系统的研制何祖彬,戚挥,杨立玺,王安高(凯里供电局,凯里 556000)摘要:为了适应10KV配电线路带电作业的要求,研制了一台能够最大限度的满足现场作业环境要求的高压带电作业机器人,包括主从操作机械臂、机器人专用升降系统、绝缘工具系统、绝缘防护系统四部分。
并在10KV配电线路上进行了试验,机械臂操作灵活,绝缘防护方法设计合理,防护性能可靠,操作简单方便。
工具系统采用无线遥控方式,可以代替人工完成作业频率较高的带电断线、带电接线等作业任务,减轻了作业人员的劳动强度,使作业人员与高压电场完全隔离,最大限度的保证作业人员的安全。
关键字:高压带电作业机器人;主从式机械臂;带电作业工具;高空作业车Design on the Live Working Robot SystemZHAO Yu-liang1, SUN Da-qing1,LI Jian2 , LI Yun-chang2(1.Shandong Electric Power Research Institute, Jinan 250002, China;2.SHANDONG LUNENG INTELLIGENCE TECHNOLOGY CO.,LTD 250002)Abstract:For 10KV distribution line request, this paper researches a line working robot for present working. This system includes master-slave manipulators, robot lift platform, insulating tool system, insulating protective system. And actual application shows the validity and feasibility of the designed architecture. Manipulator is controlled easily and insulating protective method is designed reasonably. The tool system uses wireless control and completes cutting line, wiring. The efficiency is greatly raised and the intensity of labor is decreased. The safety is greatly boosted for working persons.Keywords:live working robot; master-slave manipulator; tools for live working; vehicle-mounted mobile elevating work platform0 引言我国社会经济不断发展、人民生活质量不断提高,配电网络要实现不间断输电,就必须开展带电作业。
高压带电作业机器人系统研制高压带电作业机器人系统研制是一项旨在提高电力人员安全作业能力的关键性技术。
随着电力系统的发展和电网的不断扩建,电力设备的规格逐渐增大,电力设备的维护更加复杂和危险。
为此,机器人技术在电力设备维护和检修中得到越来越广泛的应用,为高压设备的维护和检修提供了更加高效、安全、方便和灵活的手段。
高压带电作业机器人系统研制主要包括:机器人本体设计、研发和制造、无线通信系统研发、高清晰度图像处理系统研发、控制软件的设计和实现等方面。
机器人本体主要包括机械结构、传动机构、导向系统、故障监测与记录系统、自适应机械手研制等,机器人必须具有足够的稳定性、可靠性和重复性,同时必须保证机器人本身及其控制系统的安全,确保作业人员和机器人的双重安全。
无线通信系统主要是通过 WiFi 或其他高频率信号进行数据传输,包括机器人遥控信号的传输、机器人传感器采集和图像传输等。
高清晰度图像处理系统用于对高压设备进行检查,采用并行处理和GPU加速技术能实现图像处理和判定的实时性,并能检测出高压设备的缺陷大小、形状和位置等,为电力设备检测和维护提供更加精确、可靠的数据和信息,同时也提升了维护效率。
控制软件的设计主要包括机器人导航、图像识别和高压设备保护等,确保机器人运动轨迹与高压设备轨迹之间没有干涉,同时实现了对机器人自主作业的掌控,提高了作业安全性。
高压带电作业机器人系统研制具有特殊性和复杂性,研发过程中需要综合运用机械设计、电气控制、无线通信等多个学科的知识,同时也需要考虑到机器人本身工作环境的特殊性与危险性。
为此,有关部门需制定详细的技术要求和标准,督促机器人制造企业严格执行,确保机器人质量和可靠性。
同时,加强安全培训和考核,提高电力人员的安全意识和技能水平,为高压带电作业机器人的应用提供良好的人才保障。
总之,高压带电作业机器人系统的研制,提升了电力设备维护与检修的效率和安全性,符合现代化的科技发展趋势,有助于促进电力设备的先进化和智能化。
铜冶炼自动剥片机组设备的设计及改造冷大鹏(长沙有色冶金设计研究院有限公司,湖南 长沙 410000)摘 要:随着社会不断进步,世界经济全球化发展的情况下,各行各业面临巨大压力,铜冶炼行业竞争同样十分激烈。
但是许多企业的铜冶炼自动剥片机组设备存在问题,制约了铜冶炼工作进程与效率。
为此提出铜冶炼自动剥片机组设备的设计及改造。
通过了解铜冶炼自动剥片机组设备设计,了解铜冶炼自动剥片机组设备的组成、铜冶炼自动剥片机组设备的结构工作流程,发现铜冶炼自动剥片机组设备存在问题的构件。
在改造铜冶炼自动剥片机组设备中,针对详细分析铜冶炼自动剥片机组设备后,对存在问题的部件进行改造,从而提高铜冶炼自动剥片机组设备对铜冶炼的工作进程和效率。
关键词:铜冶炼;剥片机;设备;设计中图分类号:TP273 文献标识码:A 文章编号:11-5004(2020)05-0079-2收稿日期:2020-03作者简介:冷大鹏,男,生于1984年,汉族,湖南安乡人,本科,工程师,研究方向:冶炼非标设备设计。
我国铜冶炼工业具有很大的发展,但铜的产量还远远满足不了经济建设和民用的需求。
铜冶炼工业的发展受到矿产资源、经济资金等诸多因素的制约,尽管如此,国家仍然投资和扶持冶金企业,并对老旧冶金企业进行改造,扩大生产规模,提高机械化、自动化的装备水平;对贵冶进行二次扩建,使其产量可能增加一倍以上,这为我国铜金属冶炼工业发展开拓出一个崭新时代。
随着互联网的出现,消息流通快,各国联系紧密,世界经济全球化,经济的快速发展,导致各行各业竞争力大大增加。
铜冶炼行业也面临着严峻的竞争和挑战。
为了加强中国铜冶炼行业的竞争力,我国各个铜企业争相改造铜冶炼技术,使我国铜冶炼技术水平不断接近乃至超越世界最先进水平[1]。
但是许多铜冶炼自动剥片机组设备的核心技术一直被外垄断,我国研究铜冶炼自动剥片机组设备处处受阻,在实际生产出存在诸多问题,铜冶炼自动剥片机组设备铜冶炼过程中十分重要的一个设备,铜冶炼自动剥片机组设备存在问题是十分影响铜冶炼的工作效率。
基于任务流的带电作业机器人智能控制系统鲁守银;刘珍娜;刘金存【摘要】以面向电力带电抢修作业机器人为背景,设计了可有效提高带电作业效率的智能控制系统。
采用任务流的方法分析了实际带电作业过程中各个技术环节和繁杂作业步骤,表达了任务流程之间的联系和先后关系,介绍了机器人和智能控制系统各部分组成的功能结构特点,在地面操作室里远程操控机械臂完成了断线、接线及更换跌落开关等常规带电作业任务。
【期刊名称】《制造业自动化》【年(卷),期】2013(000)023【总页数】4页(P24-27)【关键词】任务流;带电作业机器人;人机交互;任务流程【作者】鲁守银;刘珍娜;刘金存【作者单位】山东建筑大学信息与电气工程学院,济南250101;山东建筑大学信息与电气工程学院,济南250101;山东建筑大学信息与电气工程学院,济南250101【正文语种】中文【中图分类】TP242.60 引言高压带电作业机器人是一种特种作业机器人,它能够代替人工从事带电作业,将工作人员从危险、繁重和精神紧张的工作中解放出来,同时可以带来巨大的经济效益和社会效益[1]。
目前国外的高压带电作业机器人大都采用遥操作方式,即操作人员在移动车体的操作室内,利用遥操作设备实现远端机器人系统的遥控。
国内在带电作业机器人的研究上起步晚,在遥操作方式的应用研究上还处在初级阶段,还有很多问题需要解决。
这种作业方式虽然能够将人从高空、高压的环境中彻底解脱出来,提高了操作人员在作业过程中的舒适性。
然而操作人员在操作室内无法直接观看高空中机器人工作进行的情况而且所需完成的一些配电线路检修作业任务步骤繁多、流程复杂和增加了操作的难度。
要想提高机器人系统的工作效率和准确度,需要对机器人系统人机交互的智能性提出更高要求。
因此采用任务流的方法对带电作业机器人任务流程进行合理的规划和设计是很有必要的[2]。
任务流的作用是将复杂的任务流程分解成若干层子任务域,每一层任务域包含有可独立运行或被控制的若干子任务。