壁虎仿生材料 ppt课件
- 格式:ppt
- 大小:4.19 MB
- 文档页数:20

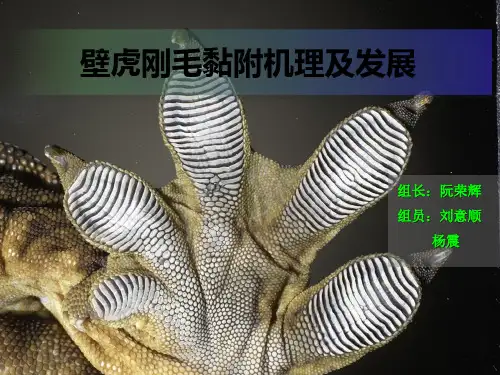
仿生学实例(仿生壁虎)乌贼和鱼雷诱饵乌贼体内的囊状物能分泌黑色液体,遇到危险时它便释放出这种黑色液体,诱骗攻击者上当。
潜艇设计者们仿效乌贼的这一功能读者设计出了鱼雷诱饵。
鱼雷诱醋似袖珍潜艇,可按潜艇的原航向航行,航速不变,也可模拟噪音、螺旋节拍、声信号和多普勒音调变化等。
正是它这种惟妙惟肖的表演,令敌潜艇或攻击中的鱼雷真假难辩,最终使潜艇得以逃脱。
蜘蛛和装甲生物学家发现蜘蛛丝的强度相当于同等体积的钢丝的5倍。
受此启发,英国剑桥一所技术公司试制成犹如蜘蛛丝一样的高强度纤维。
用这种纤维做成的复合材料可以用来做防弹衣、防弹车、坦克装甲车等结构材料。
长颈鹿和“抗荷服” 长颈鹿是目前世界上最高的动物,其大脑和心脏的距离约3米,完全是靠高达160~260毫米汞柱的血压把血液送到大脑的。
按一般分析,当长颈鹿低头饮水时,大脑的位置低于心脏,大量的血液会涌入大脑,使血压更加增高,那么长颈鹿会在饮水时得脑充血或血管破烈等疾病而死。
但是裹在长颈鹿身上的一层、厚皮紧紧箍住了血管,限制了血压,飞机设计师和航空生物学家依照长颈鹿皮肤原理,设计出一种新颖的“抗荷服”,从而解决了超高速歼击机驾驶员在突然加速爬升时因脑部缺血而引起的痛苦。
这种“抗荷服”内有一装置,当飞机加速时可压缩空气,也能对血管产生相应的压力,这比长颈鹿的厚皮更高明。
鲸鱼和潜艇的“鲸背效应” 当代核潜艇能长时间潜航于冰海之下,但若在冰下发射导弹,则必须破冰上浮,这就碰到了力学上的难题。
潜舴专家从鲸鱼每隔10分钟必须破冰呼吸一次中得到启迪,在潜艇顶部突起的指挥台围壳和上层建筑方面,作了加强材料力度和外形仿鲸背处理,果然取得了破冰时的“鲸背效应”。
蝴蝶和卫星控温系统遨游太空的人造卫星,当受到阳光强烈辐射时,卫星温度会高达200摄氏度;而在阴影区域,卫星温度会下降至零下200摄氏度左右,这很容易烤坏或冻坏卫星上的精密仪器仪表,它一度曾使航天科学家伤透了脑筋。
后来,人们从蝴蝶身上受到启迪。




机械训练—仿生壁虎2013/4/12仿生壁虎随着科技的发展,日异月新。
如今机器人逐渐代替手工进入了人们的生活。
机器人还可以代替人类从事乏味、劳累和危险的工作, 甚至完成人类不能胜任的工作。
今天我们的课题就是通过观察壁虎的习性,制作一个仿生壁虎机器人,利用它的特点形态小,可以穿梭于复杂地形等特点。
可以被人们用来从事一些人类难以到达的地方进行工作。
比如进行地震后救灾探索,复杂古墓的侦查等工作。
目前仿生壁虎机器人技术的研究主要分为细分技术研究与移动技术的研究,吸附技术研究主要是仿生生物的灵巧移动方式。
传统爬壁机器人的吸附结构主要采用磁力吸附、人的吸附结构主要是采用磁力吸附、真空吸附、静电吸附和化学粘附四种方式。
大多数爬壁机器人的足部都是通过使用吸盘、磁体或者粘性物质设计而成的。
这四种方式都存在各自的缺陷:磁力吸附要求壁面必须是磁体材料;真空吸附在壁面凹凸不平和多孔状况下吸附能力下降很快而且不能应用于真空环境;静电吸附要求被接触表面具有导电特性,由于静电力十分小,往往不能提供足够的粘附力;化学粘附时年较容易挥发、固化,使得粘胶迅速被消化而影响粘附。
所有这些方式都无法适用于于布满灰尘且崎岖不平的表面。
传统爬壁机器人功能主要是吸盘式、车轮式和履带式。
吸盘式能跨越很小的障碍,但移动速度比较慢;车轮式移动速度快、控制灵活,但维持一定的吸附能力比较困难;履带式对壁面的适应性强,着地面积大,但不容易转弯。
而这三种方式的跨越障碍能力都很弱。
传统爬壁机器人的驱动方式主要有汽缸驱动和电动机驱动两种方式。
汽缸和电机不仅质量大,增加机器人本身的重量,而且效率低,能耗非常大。
由于传统爬壁机器人在运动稳定性、灵活性、可靠性、简约的控制系统方面还存在着难于在短期内突破的技术瓶颈,因此对生物运动规律和生物及其人得研究近年来受到更多的重视。
我们此次研究将站在巨人的肩膀人,进行宏观的思考,对仿生壁虎的整体,原理、传动机构进行设计与创新。