伺服系统三环控制 ppt课件
- 格式:ppt
- 大小:10.59 MB
- 文档页数:11
伺服电机三环(电流环、速度环、位置环)控制原理及参数调节运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
1、电流环:电流环的输入是速度环PID调节后的输出,我们称为“电流环给定”吧,然后呢就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出就是上面讲到的“电流环的给定”。
速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
3、位置环:位置环的输入就是外部的脉冲(通常情况下,直接写数据到驱动器地址的伺服例外),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分环节)后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定。
位置环的反馈也来自于编码器。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。
而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。
进一步参考:伺服电机三环控制系统:https:///u013528298/article/details/80421244谈谈PID各自对差值调节对系统的影响:1、单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出。
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
1、电流环:电流环的输入是速度环PID调节后的输出,称为“电流环给定”,“电流环给定”和“电流环反馈”两者的值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机每相的相电流,“电流环反馈”不是编码器的反馈而是在驱动器内部安装在每相上的霍尔元件(磁场感应变为电流电压信号)的反馈信号。
2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出就是上面讲到的“电流环的给定”。
速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
3、位置环:位置环的输入就是外部的脉冲(通常情况下,直接写数据到驱动器地址的伺服例外),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分环节)后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定。
位置环的反馈也来自于编码器。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。
而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。
PID 各自对差值调节对系统的影响:1、单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出。
增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定。
2、单独的I(积分)就是使调节器的输出信号的变化速度与差值信号成正比,大家不难理解,如果差值大,则积分环节的变化速度大,这个环节的正比常数的比例倒数我们在伺服系统里通常叫它为积分时间常数,积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程。


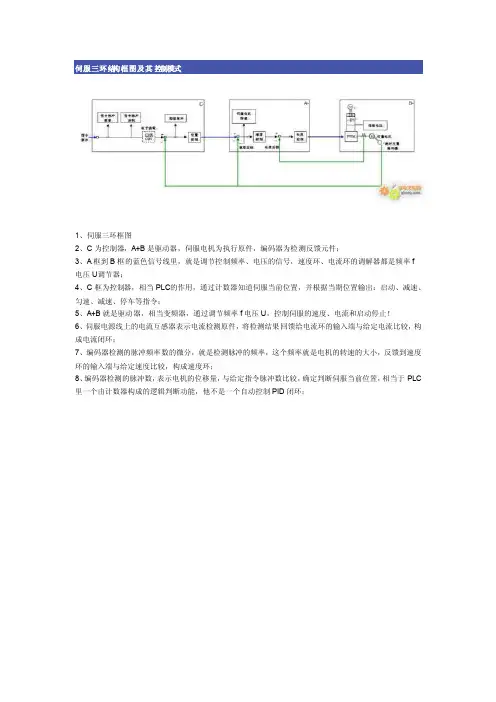
1、伺服三环框图2、C为控制器,A+B是驱动器,伺服电机为执行原件,编码器为检测反馈元件;3、A框到B框的蓝色信号线里,就是调节控制频率、电压的信号,速度环、电流环的调解器都是频率f电压U调节器;4、C框为控制器,相当PLC的作用,通过计数器知道伺服当前位置,并根据当期位置输出:启动、减速、匀速、减速、停车等指令;5、A+B就是驱动器,相当变频器,通过调节频率f电压U,控制伺服的速度、电流和启动停止!6、伺服电源线上的电流互感器表示电流检测原件,将检测结果回馈给电流环的输入端与给定电流比较,构成电流闭环;7、编码器检测的脉冲频率数的微分,就是检测脉冲的频率,这个频率就是电机的转速的大小,反馈到速度环的输入端与给定速度比较,构成速度环;8、编码器检测的脉冲数,表示电机的位移量,与给定指令脉冲数比较,确定判断伺服当前位置,相当于PLC 里一个由计数器构成的逻辑判断功能,他不是一个自动控制PI D闭环;1、运动控制的三环;2、变频器,即驱动器,有电流环和速度环;3、控制器,即PLC,由计数器构成的位置环,该环不是PI D闭环!4、所谓速度环、电流环就是伺服电机调速电路的速度环、电流环,速度环控制期间,电机为硬特性;电流环控制期间电机呈软铁性!5、所有伺服,伺服电机的控制就是一个“电机调速电路”,可以是交流电机的变频调速电路,也可以是直流电机的调速电路;6、那么电机的启动、加速、匀速、减速、停车指令,由位置环产生,或者说由PL C构成的控制器产生;1、这个图中,是说伺服指令脉冲数(位置)、指令脉冲频率(速度)给定的方式;2、举例说电子凸轮给定方式、位置给定方式等;3、所有伺服,不管他是什么型号,什么厂家、国家,伺服的速度环、电流环都在伺服电机的调速电路上!4、如果是交流电机,肯定是在变频调速电路上!如果是直流电机肯定在直流调压调速电路上!1、上边这个三环框图中,A+B就是变频调速度驱动器,有速度环、电流环构成;2、对比上边的三环图,可以看出变频器就是伺服电机的速度环、电流环,他们的结构框图实质是一样的!3、或者说A+B就是变频器的闭环框图:引用 my39366 的回复内容:……根据指令位置(速度?),结合位置环增益,给出速度,再根据速度环增益,给出需要的电流,最终位置、速度都反应在电流的大小上。