测量程序基本算法
- 格式:ppt
- 大小:348.50 KB
- 文档页数:41

gnss两种基本定位原理算法
GNSS的两种基本定位原理算法是单点定位和相对定位(差分定位)。
单点定位是根据一台接收机的观测数据来确定接收机位置的方式,只能采用伪距观测,可用于车船等的概略导航定位。
相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,既可采用伪距观测也可采用相位观测。
大地测量或工程测量均采用相位观测值进行相对定位,相对定位测量的是多台GNSS 接收机之间的基线向量。
在GNSS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响。
在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高。
如需更多信息,建议阅读GNSS相关书籍或请教专业人士。
测量坐标计算范文
接下来,平差计算是用于确定未知点的最佳估计值的过程。
在平差计
算中,需要建立一个数学模型,以描述控制点和未知点之间的关系。
这通
常采用最小二乘法进行求解。
平差计算的目标是通过最小化观测值与估计
值之间的残差,来得到最佳的未知点坐标估计。
在平差计算中,还需要考
虑精度评定和可靠性分析等。
最后,坐标计算是根据已知的控制点和已经计算出的平差值,求解出
未知点的坐标。
坐标计算通常包括水平坐标和垂直坐标两个方面。
水平坐
标计算主要涉及到平面坐标系的坐标转换和计算,垂直坐标计算则涉及到
高程的转换和计算。
常用的坐标系统包括地理坐标系、投影坐标系和高程
坐标系等。
在测量坐标计算过程中,需要考虑一些因素和技术,以确保计算结果
的准确性。
例如,需要考虑大地椭球模型和大地水准面模型,以及相应的
转换参数。
同时,还需要考虑潜在的误差源,如仪器误差、观测误差和数
据处理误差等。
为了提高计算效率和准确性,还可以采用一些常用的技术,如差分平差、间接平差、模型参数估计和同步辅助观测等。
综上所述,测量坐标计算是一项复杂且关键的技术,它是实现地理信
息系统和测量应用的基础。
通过合理的数据处理、平差计算和坐标计算,
可以得到准确可靠的坐标结果,为各种工程和科学应用提供支持。
在实际
应用中,还需要与其他相关技术和数据配合使用,以实现更广泛的功能和
应用。

测控技术基础(V1.1版)产品名称:文件编号: 生效日期: 密级:秘密 版次:Ver1.0 修改状态: 编制: 审核: 批准:目录1简介 (4)1.1 适用范围 (4)2基本测量值计算 (4)2.1基本测量量 (4)2.1.1 电流电压计算 (4)2.1.2 线电压计算 (6)2.1.3门槛处理 (7)2.1.4 电流1A/5A选型的处理 (7)2.2功率计算 (7)2.2.1 有功功率 (8)2.2.2 无功功率 (8)2.2.3 视在功率 (11)2.2.4 功率因数 (11)2.2.5 力率电费与无功补偿 (13)2.2.6 三相三线制系统的功率计算 (13)2.3频率测量 (14)2.4电能计量分析 (18)2.4.1电能计量简介 (18)2.4.2 电能计量原理 (18)2.4.3 电能脉冲 (19)3校准与补偿原理 (21)3.1分段校准原理 (21)3.2校准流程 (22)3.3补偿流程 (24)3.4补偿公式 (25)3.5线电压补偿原理 (26)4电能质量基础 (27)4.1FFT基础算法 (27)4.1.1 谐波的生成 (27)4.1.2 谐波的危害 (28)4.1.3 谐波的检测 (28)4.1.4 傅里叶算法分析 (29)4.1.4 谐波算法 (30)4.2序分量、不平衡度、K因子计算 (31)4.2.1 序分量 (31)4.2.2 不平衡度 (32)4.2.3 K因子 (32)5测控仪表通用功能块 (33)5.1需量计算模块 (33)5.1.1 实时需量 (33)5.1.2 预测需量 (33)5.2电气火灾类 (35)5.2.1 剩余电流计算 (35)5.2.2 温度计算 (36)5.3分时计费 (37)6 修改记录 (39)1简介1.1 适用范围该文档适用于测控类电表、大中型测控装置,同时适用于测控类的各种软件平台,包括:430单片机、DSP、ARM系列等。
2基本测量值计算2.1 基本测量量2.1.1 电流电压计算2.1.1.1 有效值计算有效值计算是测控仪表的核心功能模块,其中采样计算得出的电压有效值、电流有效值以及有功、无功和视在功率有效值是测控仪表运算的最小单位。
测量平差程序设计一、输入数据校验在测量平差程序设计中,输入数据校验是一个重要的环节。
由于测量数据可能存在误差或异常值,直接用于平差计算可能导致结果的不准确。
因此,需要对输入数据进行有效性检验,包括数据的范围、格式、异常值检测等。
同时,需要确保输入数据的完整性和一致性,以避免程序在后续计算中出现错误。
二、平差算法实现平差算法是测量平差程序设计的核心部分。
根据具体需求选择合适的平差算法,如最小二乘法、加权平均法等。
实现平差算法时,需要注意算法的精度和稳定性,保证计算结果的可靠性。
此外,还需要对算法进行优化,以提高计算效率。
三、结果输出测量平差程序的结果输出需要清晰、直观,便于用户理解和使用。
根据需求选择合适的输出方式,如文本、图表、表格等。
同时,需要对输出结果进行适当的格式化处理,使其更加易于阅读和对比。
四、异常处理在测量平差程序设计过程中,异常处理也是必不可少的一部分。
异常处理机制能够保证程序在遇到异常情况时,不会直接崩溃,而是进行适当的错误提示或容错处理。
对于可能出现的异常情况,需要在程序中预设相应的处理方式,以便快速定位问题并进行修复。
五、用户界面设计良好的用户界面设计能够提高测量平差程序的易用性和用户体验。
用户界面需要简洁明了,操作便捷,同时提供必要的信息提示和帮助文档。
在设计用户界面时,需要考虑用户的使用习惯和需求,以便更好地满足用户需求。
六、代码优化与调试在完成测量平差程序设计后,需要对代码进行优化和调试。
优化主要是针对代码的性能和可读性进行改进,以提高程序的运行效率和可维护性。
调试则是发现和修复程序中的错误和异常,确保程序的正确性和稳定性。
在代码优化与调试过程中,需要遵循良好的编程规范和测试习惯,以确保代码的质量和可靠性。
七、文档编写编写详尽的文档是测量平差程序设计的重要环节之一。
文档应该包括程序的使用说明、功能介绍、安装指南等内容,以便用户更好地理解和使用程序。
同时,编写文档的过程也有助于程序员的总结和提高,有助于发现设计中存在的问题和不足之处。
缺陷密度: 基本的缺陷测量是以每千行代码的缺陷数(Defects/KLOC)来测量的。
称为缺陷密度(Dd),其测量单位是defects/KLOC。
缺陷密度=缺陷数量/代码行或功能点的数量。
可按照以下步骤来计算一个程序的缺陷密度: 1.累计开发过程中每个阶段发现的缺陷总数(D)。
2.统计程序中新开发的和修改的代码行数(N)。
3.计算每千行的缺陷数Dd=1000*D/N。
例如,一个29.6万行的源程序总共有145个缺陷,则缺陷密度是: Dd=1000*145/296000=0.49 defects/KLOC。
在缺陷密度度量中存在的两个主要困难是:1.缺陷权值如何计算:是否将严重程度较轻的缺陷和较重的缺陷同等对待?2.代码行怎么统计:代码行的数量可能会因编程人员的技术水平和所使用的语言不同而不同。
3.对于黑盒测试人员,可能不太容易获取到代码行数。
为了解决以上问题,缺陷密度计算方法可以改为D/C 即缺陷总权值除以功能总权值缺陷总权值计算方法 = Sum(缺陷数x该缺陷等级的权值)假如缺陷等级有四级等级权值Blocker:阻塞-阻塞开发或者测试工作进度,或影响系统无法正常运行 10Critical:致命-系统崩溃,丢失数据或内存溢出等严重错误 5Major:严重-主要功能或业务无效 3Minor:普通-系统功能部分无效 1Trivial:琐碎-拼写错误,文本未对齐,数据长度格式校验等 0.5假如有1个Blocker错误,1个Critical错误,3个Major错误,6个Minor错误,10个Trivial错误,那D=1*10+1*5+3*3+6*1+10*0.5= 35权值可以根据自己项目的实际情况,进行拟定功能权值计算方法跟缺陷权值计算方法类似,项目经理根据各个功能模块的复杂度拟出每一个模块权值,为了对不同项目缺陷密度的可比性,不同项目的功能权值要求要基本大致相同。
常⽤的七参数转换法和四参数转换法以及涉及到的基本测量学知识原⽂:1.背景在了解这两种转换⽅法时,我们有必要先了解⼀些与此相关的基本知识。
我们有三种常⽤的⽅式来表⽰空间坐标,分别是:经纬度和⾼层、平⾯坐标和⾼层以及空间直⾓坐标。
2.经纬度坐标系(⼤地坐标系)这⾥我⾸先要强调:天⽂坐标表⽰的经纬度和⼤地坐标系表⽰的经纬度是不同的。
所以,同⼀个经纬度数值,在BJ54和WGS84下表⽰的是不同的位置,⽽以下我说的经纬度均指⼤地坐标系下的经纬度。
⼤地坐标系是⼤地测量中以参考椭球⾯为基准⾯建⽴起来的坐标系。
下⾯我跟⼤家⼤致谈谈其中涉及到的两个重要概念。
2.1⼤地⽔准⾯和⼤地球体地球表⾯本⾝是⼀个起伏不平、⼗分不规则的表⾯,这些⾼低不平的表⾯⽆法⽤数学公式表达,也⽆法进⾏运算,所以在量测和制图时,我们必须找⼀个规则的曲⾯来代替地球的⾃然表⾯。
当海洋静⽌时,它的⾃由⽔⾯必定与该⾯上各点的重⼒⽅向(铅垂直⽅向)成正交,我们把这个⾯叫做⽔准⾯。
但是,地球上的⽔准⾯有⽆数个,我们把其中与静⽌的平均海⽔⾯相重合的⽔准⾯设想成⼀个可以将地球进⾏包裹的闭合曲⾯,这个⽔准⾯就是⼤地⽔准⾯。
⽽被⼤地⽔准⾯包裹所形成的球体即为⼤地球体。
2.2地球椭球体由于地球体内部质量分布的不均匀,引起重⼒⽅向的变化,这个处处与重⼒⽅向成正交的⼤地⽔准⾯边成为了⼀个⼗分不规则的也不能⽤数学来表⽰的曲⾯。
不过虽然⼤地⽔准⾯的形状⼗分的不规则,但它已经是⼀个很接近于绕⾃转轴(短轴)旋转的椭球体了。
所以在测量和制图中就⽤旋转椭球来代替⼤地球体,这个旋转球体通常称地球椭球体,简称椭球体。
2.3常⽤⼤地坐标系不同坐标系,其椭球体的长半径,短半径和扁率是不同的。
⽐如我们常⽤的四种坐标系所对应的椭球体,它们的椭球体参数就各不相同:BJ54坐标系:属参⼼坐标系,长轴6378245m,短轴6356863,扁率1/298.3。
XIAN80坐标系:属参⼼坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101。

5g测量算法5G测量算法是指在5G通信系统中用于测量和评估信号质量和网络性能的一种算法。
随着5G技术的快速发展和广泛应用,测量算法的研究和优化变得尤为重要。
本文将介绍5G测量算法的基本原理和常见应用,以及其在提高网络性能和用户体验方面的重要作用。
一、概述5G测量算法是指在5G通信系统中用于测量和评估信号质量和网络性能的一种算法。
它通过对信号参数和网络指标进行测量和分析,帮助网络运营商和服务提供商了解网络质量情况,及时发现和解决问题,优化网络性能,提高用户体验。
二、基本原理5G测量算法的基本原理是通过对信号参数进行测量和分析,从而评估信号质量和网络性能。
常见的信号参数包括信号强度、信噪比、信号延迟等。
通过对这些参数的测量和分析,可以了解信号的稳定性、可靠性和传输速率等情况,进而评估网络的性能。
三、常见应用1. 覆盖评估:5G测量算法可以对网络的覆盖范围进行评估,帮助网络运营商了解网络信号的强度和稳定性,及时调整天线和基站的布局,优化网络覆盖效果。
2. 容量评估:5G测量算法可以对网络的容量进行评估,帮助网络运营商了解网络的吞吐量和传输速率等指标,及时调整网络资源分配策略,提高网络的传输效率。
3. 干扰监测:5G测量算法可以对网络的干扰情况进行监测,帮助网络运营商了解干扰源的位置和强度,及时采取干扰消除措施,提高网络的质量和可靠性。
4. 网络优化:5G测量算法可以对网络的参数进行优化,帮助网络运营商了解网络的瓶颈和问题,及时调整网络的参数和配置,提高网络的性能和用户体验。
四、算法改进为了进一步提高5G测量算法的准确性和可靠性,研究人员不断进行算法改进。
一方面,可以通过引入新的测量指标和算法模型,提高测量结果的准确性和可靠性;另一方面,可以通过优化算法的计算复杂度和实时性,提高算法的运行效率和实用性。
五、挑战与展望尽管5G测量算法在提高网络性能和用户体验方面有着重要的作用,但仍然面临一些挑战。
首先,随着5G技术的快速发展和广泛应用,网络规模和复杂度不断增加,给测量算法的设计和实现带来了挑战。
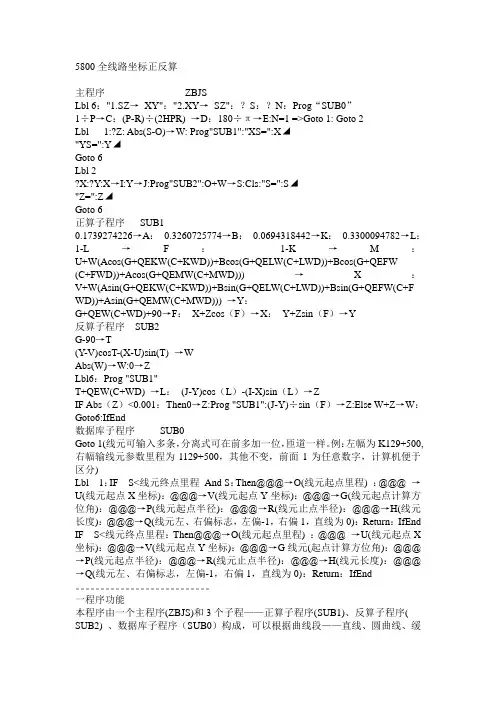
5800全线路坐标正反算主程序ZBJSLbl 6:"1.SZ→XY":"2.XY→SZ":?S:?N:Prog“SUB0”1÷P→C:(P-R)÷(2HPR) →D:180÷π→E:N=1 =>Goto 1: Goto 2Lbl 1:?Z: Abs(S-O)→W: Prog"SUB1":"XS=":X◢"YS=":Y◢Goto 6Lbl 2?X:?Y:X→I:Y→J:Prog"SUB2":O+W→S:Cls:"S=":S◢"Z=":Z◢Goto 6正算子程序SUB10.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C+MWD)))→X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+F WD))+Asin(G+QEMW(C+MWD))) →Y:G+QEW(C+WD)+90→F:X+Zcos(F)→X:Y+Zsin(F)→Y反算子程序SUB2G-90→T(Y-V)cosT-(X-U)sin(T) →WAbs(W)→W:0→ZLbl6:Prog "SUB1"T+QEW(C+WD) →L:(J-Y)cos(L)-(I-X)sin(L)→ZIF Abs(Z)<0.001:Then0→Z:Prog "SUB1":(J-Y)÷sin(F)→Z:Else W+Z→W:Goto6:IfEnd数据库子程序SUB0Goto 1(线元可输入多条,分离式可在前多加一位,匝道一样。

三相电压电流adc算法程序
三相电压电流ADC算法程序。
在电力系统中,对三相电压和电流进行准确的测量和采集是非
常重要的。
为了实现对三相电压和电流的准确采集,通常会使用
ADC(模数转换器)来进行数字化处理。
ADC算法程序是用来对采集
到的模拟信号进行数字化处理的关键工具。
首先,我们需要对三相电压和电流进行采集。
这可以通过传感
器或者变压器来实现。
采集到的模拟信号需要经过滤波和放大处理,然后再输入到ADC中进行数字化处理。
ADC算法程序需要考虑到电压和电流的波形特性,以及系统的
采样率和精度要求。
通常会采用差分输入方式来对三相电压和电流
进行采集,以提高抗干扰能力和准确性。
在数字化处理过程中,需要进行采样、量化和编码等步骤,以
将模拟信号转换为数字信号。
此外,还需要考虑到数据通信和存储
的需求,以便将采集到的数据传输给上位机或者进行存储和分析。
ADC算法程序的设计需要综合考虑系统的实际需求和性能指标,以确保对三相电压和电流的准确采集和处理。
同时,还需要考虑到
系统的稳定性和可靠性,以确保系统在各种工作条件下都能够正常
运行。
总之,三相电压电流ADC算法程序是实现对三相电压和电流准
确采集和数字化处理的关键技术,它对于电力系统的运行和监测具
有重要意义。
通过不断优化和改进ADC算法程序,可以提高电力系
统的运行效率和安全性,为电力系统的智能化和自动化发展提供有
力支持。
5gultdoa定位算法流程5G UL-TDOA (Uplink Time Difference of Arrival) 定位算法是一种基于5G网络的定位算法,通过分析接收到的上行信号的到达时间差异,来确定设备的位置。
下面是5G UL-TDOA定位算法的流程:1.用户设备发送上行信号:用户设备通过5G网络发送上行信号,基站接收到信号并记录下信号发射时间。
2.基站间相对时隙差测量:接收到信号的基站之间会进行相对时隙差的测量。
这是通过比较基站接收到同一信号的到达时间来实现的。
基站之间会将时间差信息上传到位置测量控制中心。
3.位置测量控制中心计算时差:位置测量控制中心收集到多个基站之间的时差信息后,根据传输时延计算得到每个基站到达时间的相对差异。
4.相对差异调整:根据位置测量控制中心计算得到的相对差异,调整基站之间的到达时间关系,以获取更准确的测量结果。
5. UL-TDOA定位计算:基站之间的到达时间差异被传输到定位计算节点,使用定位算法来计算设备的位置。
常用的算法包括最小二乘法、Kalman滤波、粒子滤波等。
6.位置估计:定位计算节点根据测量结果和定位算法,估计设备的位置。
输出可能包括经纬度、海拔高度和误差椭圆等信息。
7.位置推断:根据位置估计信息,结合设备的移动轨迹和其他辅助信息,进行位置推断。
这可以用于预测设备的未来位置或行为。
8.结果更新和反馈:根据实时采集的数据,不断更新设备位置的估计结果,并以反馈形式传输给用户设备或其他应用程序。
9.容错和优化:算法提供容错机制,以应对信号弱、多径效应和其他干扰因素引起的测量误差。
同时,算法也可以进行优化,提高位置测量的精度和可靠性。
总结:5GUL-TDOA定位算法使用了5G网络上行信号的到达时间差异来确定设备的位置。
通过测量基站之间的相对时隙差,计算得到每个基站的到达时间的相对差异。
然后,使用定位算法来计算设备的位置,并进行位置推断和结果更新。
该算法具有良好的容错性能和优化能力,适用于各种实际环境和应用场景。
三点测交的计算方法三点测交,又称为三点求交或三点测量法,是一种用于计算三角形或者三维空间中多个对象的公共交点坐标的方法。
它广泛应用于几何计算、计算机图形学和计算机视觉等领域。
下面将详细介绍三点测交的计算方法。
三点测交的基本原理是通过同时测量至少三个点的空间坐标,然后根据这些坐标进行计算,求得三个对象的交点坐标。
在处理三角形交点的情况下,通常选择三个三角形的顶点作为测量点。
在处理更复杂的情况下,可以选择任意三个点进行测量。
具体的计算步骤如下:1.测量三个点的三维坐标:首先需要使用测量仪器(例如全站仪或者激光测距仪)测量三个点的空间坐标。
这些点可以是三角形的顶点,也可以是其他感兴趣的体素或者物体的顶点。
2.构建方程组:根据测得的坐标,可以构建一个包含三个方程的方程组。
每个方程代表一个点的坐标,形式为Ax+By+Cz+D=0,其中A、B、C和D是方程的系数,x、y和z是点的坐标。
3.求解方程组:解方程组可以得到一个交点的坐标(x,y,z)。
这可以通过消元法、高斯消元法或者其他数值解法完成。
4.验证交点:为了验证交点的准确性,可以将求得的交点坐标代入方程组,检查是否满足每个点的方程。
如果交点坐标能够使每个点的方程都成立,那么它就是三个对象的交点。
需要注意的是,三点测交法对于准确的测量和定位非常重要。
测量的误差会直接影响到计算的结果,特别是在处理绝对精度要求较高的应用中。
因此,在进行三点测交之前,需要保证所测点的坐标具有足够的精度。
此外,三点测交方法也可以通过其他优化算法进行改进,例如最小二乘法、非线性优化等。
这些方法可以提高计算的精度和效率,特别是在处理大量点和复杂模型的情况下。
总之,三点测交是一种常用的计算方法,可以用于计算三角形或者三维空间中多个对象的交点坐标。
通过测量三个点的坐标并求解方程组,可以获得这些对象之间的交点,并在应用中发挥重要作用。
《测绘程序设计》实验指导书华北科技学院土木工程系测绘工程教研室2010年8月实验一:线性方程组解算一、实验目的与要求⒈初步掌握线性方程组的算法;⒉初步掌握线线性方程组在计算机上实现方法。
二、实验安排⒈实验共需用2学时。
⒉实验每个小组1人,用C/VB等语言在计算机上完成程序代码的编写,并调试通过,然后用算例印证程序的正确性。
三、实验步骤及要点⒈在课余时间,提前准备线性方程组解算程序代码;⒉上机时写入代码,并调试运行;⒊用算例进行印证。
四、实验指导(一)Turbo C工作环境一个C语言程序的实施是从进入Turbo C的集成环境开始的,而进入C语言的环境,一般有两种途径:从DOS环境进入和从Windows环境进入。
1、从DOS环境进入:在DOS命令行上键入:C>CD \TC↙(指定当前目录为TC子目录)C>TC↙ (进入Turbo C环境)这时进入Turbo C集成环境的主菜单窗口,屏幕显示如下图所示。
2、从Windows环境进入:在Windows 95/98环境中,如果本机中已安装了Turbo C,可以在桌面上建立一个快捷方式,双击该快捷图标即可进入C语言环境。
或者从开始菜单中找到“运行”,在运行对话框中键入“C:\TC\TC”,“确定”即可。
刚进入TC环境时,光带覆盖在“File”上,整个屏幕由四部分组成,依次为:主菜单、编辑窗口、信息窗口和功能提示行(或称快速参考行)。
(1)主菜单显示屏的顶部是主菜单条,它提供了8个选择项:File 处理文件(装入、存盘、选择、建立、换名存盘、写盘),目录操作(列表、改变工作目录),退出Turbo C,返回DOS 状态。
Edit 建立、编辑源文件。
Run 自动编辑、连接并运行程序。
Compile 编辑、生成目标文件组合成工作文件。
Project 将多个源文件和目标文件组合成工作文件。
Option 提供集成环境下的多种选择和设置(如设置存储模式、选择编参数、诊断及连接任选项)以及定义宏;也可记录Include、Output及Library文件目录,保存编译任选项和从配置文件加载任选项。
测量坐标计算程序v7简介测量坐标计算程序v7是一个用于测量坐标计算的工具,旨在帮助工程师和测量人员快速、准确地计算目标点的坐标。
该程序通过输入已知点的坐标和测量点的观测数据,自动计算出测量点的坐标,并提供可视化结果展示。
功能特点测量坐标计算程序v7具有以下功能特点:1.快速计算:程序通过输入已知点的坐标和测量点的观测数据,自动进行测量坐标计算,大大减少了人工计算的时间和精力。
2.准确计算:程序采用精确的数学模型和算法,保证计算结果的准确性。
3.多种坐标系支持:程序支持常见的坐标系,包括直角坐标系、极坐标系、测站坐标系等,满足不同测量需求。
4.可视化展示:程序提供直观的可视化结果展示,使用户能够更清晰地了解计算结果。
5.实用工具集成:程序集成了一些实用工具,如坐标转换、坐标平差等,方便用户进行相关计算。
使用方法使用测量坐标计算程序v7非常简单,按照以下步骤进行操作:1.输入已知点坐标:首先,将已知点的坐标输入到程序中。
用户可以直接手动输入坐标,也可以从外部文件导入。
2.输入观测数据:然后,将测量点的观测数据输入到程序中。
观测数据包括测量角、距离等信息,用户需要按照一定的格式输入。
3.执行计算:点击计算按钮,程序将自动进行测量坐标的计算。
计算过程可能需要一定时间,用户可以耐心等待。
4.查看结果:计算完成后,程序将给出测量点的坐标结果,并提供可视化展示。
用户可以根据需要导出结果或进行进一步处理。
示例下面是一个使用测量坐标计算程序v7的示例:假设有三个已知点的坐标分别为A(1, 2, 3)、B(4, 5, 6)、C(7, 8, 9),现在要计算测量点D的坐标。
我们测量得到的数据如下:•观测角:∠BAC = 90°,∠BCA = 45°•观测距离:AC = 10m,AD = 5m按照以下步骤使用测量坐标计算程序v7:1.将已知点的坐标输入到程序中:已知点A:(1, 2, 3)已知点B:(4, 5, 6)已知点C:(7, 8, 9)2.将测量点的观测数据输入到程序中:观测角:∠BAC = 90°,∠BCA = 45°观测距离:AC = 10m,AD = 5m3.点击计算按钮,程序将自动进行测量坐标的计算。
Goertzel算法实现Goertzel基本算法在每次采样后立即进行处理,在每个第N次采样进行一次音调检测。
在采用FFT算法时,我们要对成块的采样进行处理,但这并不意味着必须按块来处理数据。
数字处理的时间很短,因此如果每次采样都存在一次中断,那么这些数字处理完全可以在中断服务程序(ISR)内完成。
或者,如果系统中存在采样缓存,那么可以持续采样,然后进行批处理。
在真正运行Goertzel算法之前,必须进行下面的初步计算:1. 决定采样率;2. 选择块大小,即N;3. 预先进行一次余弦和正弦计算;4. 预先计算一个系数。
这些计算均可以预先完成,然后硬编码到程序中,从而节省RAM和ROM空间,也可以动态方式计算。
选择合适的采样率实际上,采样率可能已经由应用本身决定了。
例如,在电信应用中普遍采用8kHz的采样率,即每秒8,000个采样。
又如,模数转换器(或编解码器)的工作频率可能是由一个我们无法控制的外部时钟或外部晶振决定。
但如果我们可以选择采样率,那么就必须遵循奈奎斯特采样定理:采样率至少不低于最高信号频率的两倍。
这是是因为如果我们要检测多个频率,那么采用更高的采样率可能会得到更好的结果。
而且我们都希望采样率与每一个感兴趣的频率之间均呈整数倍关系。
块大小的设置Goertzel算法中的块大小N与相应的FFT中的点数类似,它控制了频率分辨率的大小。
例如,若采样率为8kHz,而N为100个采样,那么频率分辨率就是80Hz。
这就可能使我们为了获取最大的频率分辨率而尽量将N取高。
然而N越大,检测到每个音调所需的时间就越多,因为我们必须等所有这N个采样都完成后才能开始处理。
例如,采样率为8kHz时,累积800个采样需要100ms。
若想缩短检测音调的时间,就必须适当调整N的值。
影响N的选择的另一个因素是采样率和目标频率之间的关系。
比较理想情况是目标频率在相应的频率分辨率的中点范围内,也就是说,我们希望目标频率是sample_rate/N比值的整数倍。
一0102二有功功率测量的基本方法简述 随着现代电力电子技术的高速发展,电压、电流的调制信号得到更广泛的应用。
面对越来越复杂的电信号,传统的有功功率测量方法已经难以满足其测量需求,本文根据有功功率测量基本方法及变频器应用介绍功率分析仪的有功功率测量原理。
有功功率测量方法正弦波有功功率算法 这种有功功率计算公式P=UIcosφ是在正弦电路技术上推导出来的,因此,只适用于正弦电路的有功功率测量。
这种测量方式通过有效值测量电路获取电压、电流值,通过相位测量电路测量电压、电流的相位差,再根据正弦电路有功功率计算公式P=UIcosφ计算获得有功功率。
由于相位测量电路通常采用过零检测法,而交流电零点附近不可避免会有一定的毛刺,因此,相位测量精度较低。
在低功率因数下的功率测量准确度亦较低,必须采用适用于低功率因数工况下的测试仪表才能有效保证有功功率测量准确度。
通用有功功率算法 通用有功功率计算定义为一个周期内瞬时功率积分的平均值。
采用模拟乘法器获取电压、电流的乘积,得到瞬时功率,再用固定的时间对瞬时功率进行积分,即可获得瞬时功率的平均值,也就是有功功率。
该方法适用任意波形电量的有功功率测量。
功率分析仪的有功功率测量基本原理 现今功率分析仪测量的基本原理为通用有功功率算法。
功率分析仪的每个测量通道,对输入的电流或者电压信号进行采样,对采样得到的数据按下列所示公式进行计算获取结果: 其中u(t)为更新周期内采集的电压信号数据(瞬时数据),i(t)为更新周期内采集的电流信号数据(瞬时数据),u(t)和i(t)为同一时刻的采样数据。
比如在变频器应用,变频器的主电路一般为“交直交”架构组成,在整流回路中一般接有大电容,输入电流的波形不是正弦波;在逆变输出回路中,输出电压信号是受PWM载波信号调整的波形,输入输出都不是标准的正弦波,含有较多的高次谐波分量,变频器典型的输入测波形如下: 对输入测得有功率,传统的计算公式为:P=Urms*Irms*cosφ。
工程测量的方法工程测量是指在工程建设过程中,利用测量技术和仪器设备,对地表、建筑物、构筑物等进行精确测量,获取各种空间位置和形状尺寸的数据,为工程设计、施工和管理提供准确的基础数据。
在工程测量中,常用的方法有平面测量、高程测量、角度测量等。
下面将详细介绍工程测量的方法。
首先,平面测量是工程测量中最基本的方法之一。
平面测量主要是利用测量仪器和设备,在水平面上进行测量,包括长度、面积、坐标等数据的测量。
常用的平面测量仪器有测距仪、全站仪、GPS定位仪等。
通过这些仪器的使用,可以对地表、建筑物等进行精确的平面位置测量,为工程设计和施工提供必要的数据支持。
其次,高程测量是工程测量中另一个重要的方法。
高程测量是指对地表、建筑物等的垂直位置进行测量,获取其高程数据。
常用的高程测量仪器有水准仪、高程仪等。
通过这些仪器的使用,可以对地表的高程进行精确测量,为工程设计和施工提供高程控制点和参考数据。
此外,角度测量也是工程测量中不可或缺的方法之一。
角度测量是指利用测角仪器和设备,对地表、建筑物等的方向和角度进行测量。
常用的角度测量仪器有经纬仪、全站仪等。
通过这些仪器的使用,可以对地表、建筑物的方向和角度进行精确测量,为工程设计和施工提供方向控制和参考数据。
总之,工程测量是工程建设过程中不可或缺的环节,其准确性和精度直接影响着工程质量和安全。
在实际工程中,需要根据具体的测量任务和要求,选择合适的测量方法和仪器设备,进行科学、准确的测量工作。
只有这样,才能为工程建设提供可靠的数据支持,确保工程质量和安全。