第1章思考题及参考答案
- 格式:pdf
- 大小:182.49 KB
- 文档页数:3
《比较文学概论》思考题及参考答案(一)第一章文学研究的新途径——比较文学1、三个概念:(1)文学理论,(2)文学批评,(3)文学史。
2、什么是比较文学3、比较文学的起源是什么4、举例说明比较文学寻求的是他种文化的应和。
5、比较文学的互补功能包括哪些内容6、什么是总体文学7、什么是世界文学答:1、(1)每一部文学作品都有它的个别特征,同时又具有作为艺术作品的共同之点,正如每一个人都有他的个性,同时又有同民族、同职业的共同特征以至人类的通性一样。
一件文学作品既是特殊的,又是普通的;既是个别的,又是一般的。
任何“特殊”和“个别”,只要是文学的,就包含着文学的共同原则,就可以用这种原则来加以解释,这种原则就是文学理论。
(2)文学批评指的是对某一具体文学作品的研究,它要求对具体文学现象作出分析和评价。
(3)文学史主要研究文学的发展和演变。
它不仅由对各个作品的分析和评价积累而成,同时受到不同时代的社会经济状况、风习和心态的制约。
2、研究存在于不同文化中的不同文学之间的各种现象,以及其间的各种关系,这就是比较文学。
3、比较文学起源于了解他人的兴趣。
人们的相互接触多了。
就会产生相互了解、相互认识的愿望。
如果没有相互认识的兴趣就谈不上比较文学。
比较文学的根本价值就在于它为文学研究开辟了一个崭新的层面。
当文学被封闭在某一个别民族文化体系之中时,它就不可能突破原有的思维模式,来接受新鲜事物。
只有认识了他人,才能更好地认识自己。
这就是比较文学的重要功能之一,“互识”。
4、比较文学寻求他种文化的应和。
举例来说,人们在文学方面遭遇的共同问题首先碰到的就是“什么是文学”。
中国传统文学的主体最早是抒情诗,中国文论对文学的界定首先是强调人类内在的“志”和“情”,“志”和“情”不是凭空产生的,“景乃诗之媒,情乃诗之胚,合而为诗。
”5、比较文学的“互补”功能包括以下几方面的内容。
首先是在与“他者”(指他种文化中的文学)的对比中,更清楚地了解并突出了自身的特点。
传热学思考题参考答案第一章:1、用铝制水壶烧开水时,尽管炉火很旺,但水壶仍安然无恙。
而一旦壶内的水烧干后水壶很快就被烧坏。
试从传热学的观点分析这一现象。
答:当壶内有水时,可以对壶底进行很好的冷却(水对壶底的对流换热系数大),壶底的热量被很快传走而不至于温度升得很高;当没有水时,和壶底发生对流换热的是气体,因为气体发生对流换热的表面换热系数小,壶底的热量不能很快被传走,故此壶底升温很快,容易被烧坏。
2、什么是串联热阻叠加原则,它在什么前提下成立?以固体中的导热为例,试讨论有哪些情况可能使热量传递方向上不同截面的热流量不相等。
答:在一个串联的热量传递过程中,如果通过每个环节的热流量都相同,则各串联环节的总热阻等于各串联环节热阻的和。
例如:三块无限大平板叠加构成的平壁。
例如通过圆筒壁,对于各个传热环节的传热面积不相等,可能造成热量传递方向上不同截面的热流量不相等。
第二章:1、扩展表面中的导热问题可以按一维问题处理的条件是什么?有人认为,只要扩展表面细长,就可按一维问题处理,你同意这种观点吗?答:条件:(1)材料的导热系数,表面传热系数以及沿肋高方向的横截面积均各自为常数(2)肋片温度在垂直纸面方向(即长度方向)不发生变化,因此可取一个截面(即单位长度)来分析(3)表面上的换热热阻远远大于肋片中的导热热阻,因而在任一截面上肋片温度可认为是均匀的(4)肋片顶端可视为绝热。
并不是扩展表面细长就可以按一维问题处理,必须满足上述四个假设才可视为一维问题。
2、肋片高度增加引起两种效果:肋效率下降及散热表面积增加。
因而有人认为随着肋片高度的增加会出现一个临界高度,超过这个高度后,肋片导热热流量会下降,试分析该观点的正确性。
答:的确肋片高度增加会导致肋效率下降及散热表面积增加,但是总的导热量是增加的,只是增加的部分的效率有所减低,所以我们要选择经济的肋片高度。
第三章:1、由导热微分方程可知,非稳态导热只与热扩散率有关,而与导热系数无关。
第⼀章习题答案第⼀章思考题答案1.基于总线结构的计算机系统通常由哪5个部分构成?并简述各部分的主要作⽤。
解答:1.中央处理器CPU(central processor unit)或称微处理器(microprocessor unit)中央处理器具有算术运算、逻辑运算和控制操作的功能,是计算机的核⼼。
2.总线总线是把计算机各个部分有机地连接起来的导线,是各个部分之间进⾏信息交换的公共通道。
3.存储器(memory)存储器的功能是存储程序、数据和各种信号、命令等信息,并在需要时提供这些信息。
4.输⼊输出(I/O)接⼝外部设备与CPU之间通过输⼊输出接⼝连接。
5.输⼊输出(I/O)设备输⼊设备是变换输⼊信息形式的部件。
它将⼈们熟悉的信息形式变换成计算机能接收并识别的信息形式。
输出设备是变换计算机的输出信息形式的部件。
它将计算机处理结果的⼆进制信息转换成⼈们或其他设备能接收和识别的形式,如字符、⽂字、图形等。
2.试举例说明计算机进⾏加法运算的⼯作过程。
解答:⽰例如下:inta,b,c;c=a+b;⼯作过程简述:a,b,c都为内存中的数据,CPU⾸先需要从内存中分别将a,b的值读⼊寄存器中,然后再执⾏加法运算指令,加法运算的结果暂存在寄存器中,因此还需要执⾏数据存储指令,将运算结果保存到内存中,因此像上例中的C语⾔语句,实际上需要经过两条数据读取指令,⼀条加法运算指令,⼀条数据存储指令才能完成。
3.“冯·诺依曼型结构”计算机与哈佛结构计算机的差别是什么?各有什么优缺点?解答:冯·诺依曼结构计算机具有以下⼏个特点:①有⼀个存储器;②有⼀个控制器;③有⼀个运算器,⽤于完成算术运算和逻辑运算;④有输⼊和输出设备,⽤于进⾏⼈机通信;⑤处理器使⽤同⼀个存储器存储指令和数据,经由同⼀个总线传输。
哈佛结构计算机:①使⽤两个独⽴的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;②具有⼀条独⽴的地址总线和⼀条独⽴的数据总线,利⽤公⽤地址总线访问两个存储模块(程序存储模块和数据存储模块),公⽤数据总线则被⽤来完成程序存储模块或数据存储模块与CPU 之间的数据传输;③两条总线由程序存储器和数据存储器分时共⽤。
第1章思考题与习题1-1动力系统、电力系统和电力网的基本组成形式如何?1-2电力系统的接线方式有几种?何谓开式网络?何谓闭式网络?1-3简述电力系统运行特点和要求。
1-4如何评价电能质量,电能质量的三个指标是什么?各有怎样要求?1-5为什么要规定电力系统的电压等级?简述主要电压等级。
1-6电力系统的各个元件(设备)的额定电压如何确定?举例说明。
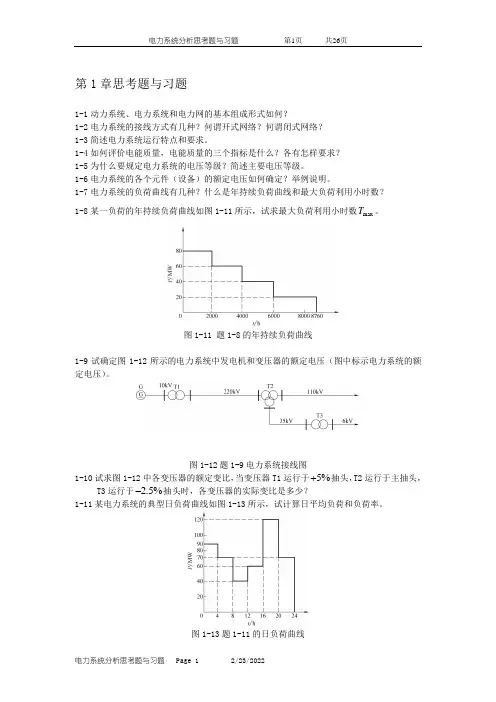
1-7电力系统的负荷曲线有几种?什么是年持续负荷曲线和最大负荷利用小时数?T。
1-8某一负荷的年持续负荷曲线如图1-11所示,试求最大负荷利用小时数max图1-11 题1-8的年持续负荷曲线1-9试确定图1-12所示的电力系统中发电机和变压器的额定电压(图中标示电力系统的额定电压)。
图1-12题1-9电力系统接线图+抽头,T2运行于主抽头,1-10试求图1-12中各变压器的额定变比,当变压器T1运行于5%-抽头时,各变压器的实际变比是多少?T3运行于 2.5%1-11某电力系统的典型日负荷曲线如图1-13所示,试计算日平均负荷和负荷率。
图1-13题1-11的日负荷曲线第2章思考题与习题2-1 架空输电线路的电阻、电抗、电纳和电导是如何计算的,影响电抗的参数的主要因素是什么?2-1 架空线路采用分裂导线有哪些优点?电力线路一般采用什么样的等效电路表示? 2-3 何谓自然功率?2-4 双绕组和三绕组变压器一般以什么样等值电路表示?2-5 对于升压型和降压型的变压器,如果所给出的其他原始数据均相同,它们的参数相同吗?为什么?2-7 什么称为变压器的额定变比、实际变比、平均额定电压变比,在归算中如何应用? 2-8 何谓有名值?何谓标幺制?标幺制有什么优缺点?基准值如何选取? 2-9 电力系统等值电路的元件参数计算时,何谓精确计算法?何谓近似计算法?它们分别用在怎样的场合?2-10 试推导由负荷功率求取恒定负荷阻抗或导纳的方法。
2-11 一条长度为600km 的500kV 架空线路,使用4×LGJ-400分裂导线,611110.01870.275 4.05100r x km b S km g -=Ω=Ω=⨯=、、、。
财政学最全习题第一章复习思考题及答案第一章财政概念和财政职能一、填空题1、市场的资源配置功能不是万能的,市场失灵主要表现在:垄断、信息不充分或不对称、、收入分配不公、经济波动等。
2、政府干预经济的手段包括:立法和行政手段、组织公共生产和提供公共物品、3、政府干预失效的原因和表现可能发生在:政府决策失误、、政府提供的信息不及时甚至失真、政府职能的“越位”和“缺位”。
4、公共物品的两个基本特征是:和5、财政的基本特征包括:阶级性与公共性、强制性与非直接偿还性、6、财政的基本职能是:资源配置职能、、经济稳定与发展职能。
7、根据国际惯例,一般认为,基尼系数处于之间被称为合理区间。
8、国际收支平衡指的是一国在国际经济往来中维持经常性项目收支的大体平衡,包括进出口收支、和无偿转移收支。
9、自马斯格雷夫于1959年出版的《》首次引进公共经济学概念、随后冠以公共经济学的著作得以陆续出版。
10、社会的公共需要是共同的,但又是、特殊的。
二、判断题1、完整的市场体系是由家庭、企业和政府三个相对独立的主体组成的,政府可以通过法律、行政和经济等手段,“凌驾”于市场之上介入和干预市场。
2、根据国际惯例,一般认为,基尼系数处于0.4~0.5之间被称为合理区间。
3、由于市场失灵的存在,政府对经济的干预越多越好。
4、在市场经济条件下,几乎不可避免地会产生由于滥用权力而发生的寻租行为。
5、国防作为公共物品主要体现在它的非竞争性上。
6、公共财政是针对计划经济时期所谓的“生产性财政”或“建设性财政”提出的。
7、收入分配的核心问题是实现公平分配,因而财政的收入分配职能所要研究的问题主要是确定显示公平分配的标准和财政调节收入分配的特殊机制和手段。
8、发展一定是增长,但增长不一定是发展。
9、公共需要是相对于私人需要的,因而公共需要和私人需要是矛盾的。
三、不定项选择1、一般来说,下列哪些物品是纯公共物品:A、国防B、花园C、教育D、桥梁2、一般来说,下列哪些物品是准公共物品:A、国防B、花园C、教育D、桥梁3、市场的资源配置功能不是万能的,市场失灵的主要表现在:A、垄断B、信息不充分或不对称C、收入分配不公D、经济波动4、政府干预经济的手段包括:A、立法和行政手段B、组织公共生产和提供公共物品C、财政手段D、强制手段5、政府干预失效的原因和表现可能发生在:A、政府决策失误B、政府提供信息不及时甚至失真C、政府职能的“越位”和“缺位”D、寻租行为6、公共物品的基本特征包括:A、历史性B、非排他性C、非竞争性D、单一性7、财政的基本职能是:A、资源配置职能B、调节收入分配职能C、组织生产和销售职能D、经济稳定和发展职能8、财政的基本特征包括:A、阶级性与公共性B、强制性与非直接偿还性C、收入与支出的平衡性D、历史性9、完整的市场体系是哪几个相对独立的主体组成的:A、家庭B、企业C、政府D、中介10、财政实现收入分配职能的机制和手段有:A、划清市场与财政分配的界限和范围B、规范工资制度C、加强税收调节D、通过转移支出四、问答题1、什么是市场失灵?2、为什么会出现政府干预失效?3、区分公共物品与私人物品的基本标准。
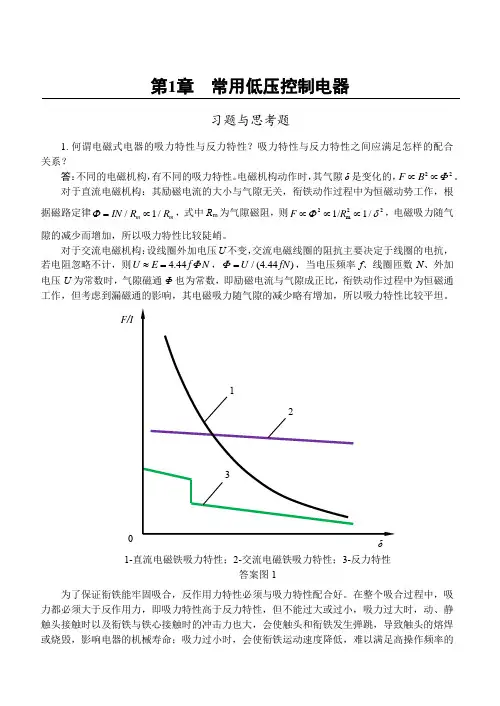
第1章 常用低压控制电器习题与思考题1. 何谓电磁式电器的吸力特性与反力特性?吸力特性与反力特性之间应满足怎样的配合关系?答:不同的电磁机构,有不同的吸力特性。
电磁机构动作时,其气隙δ是变化的,22F B Φ∝∝。
对于直流电磁机构:其励磁电流的大小与气隙无关,衔铁动作过程中为恒磁动势工作,根据磁路定律/1/m m IN R R Φ=∝,式中R m 为气隙磁阻,则222m 1/1/F R Φδ∝∝∝,电磁吸力随气隙的减少而增加,所以吸力特性比较陡峭。
对于交流电磁机构:设线圈外加电压U 不变,交流电磁线圈的阻抗主要决定于线圈的电抗,若电阻忽略不计,则 4.44U E f N Φ≈=,/(4.44)U fN Φ=,当电压频率f 、线圈匝数N 、外加电压U 为常数时,气隙磁通Φ也为常数,即励磁电流与气隙成正比,衔铁动作过程中为恒磁通工作,但考虑到漏磁通的影响,其电磁吸力随气隙的减少略有增加,所以吸力特性比较平坦。
为了保证衔铁能牢固吸合,反作用力特性必须与吸力特性配合好。
在整个吸合过程中,吸力都必须大于反作用力,即吸力特性高于反力特性,但不能过大或过小,吸力过大时,动、静触头接触时以及衔铁与铁心接触时的冲击力也大,会使触头和衔铁发生弹跳,导致触头的熔焊或烧毁,影响电器的机械寿命;吸力过小时,会使衔铁运动速度降低,难以满足高操作频率的1-直流电磁铁吸力特性;2-交流电磁铁吸力特性;3-反力特性 答案图1F/Iδ0 123要求。
因此,吸力特性与反力特性必须配合得当,才有助于电器性能的改善。
在实际应用中,可调整反力弹簧或触头初压力以改变反力特性,使之与吸力特性有良好配合,参见答案图1所示。
2.单相交流电磁机构为什么要设置短路环?它的作用是什么?三相交流电磁铁要否装设短路环?答:由于单相交流接触器铁心的磁通是交变的,故当磁通过零时,电磁吸力也为零,吸合后的衔铁在反力弹簧的作用下将被拉开,磁通过零后电磁吸力又增大,当吸力大于反力时,衔铁又被吸合。
第1章 思考题与习题参考答案一、选择题1.等压下加热5%的下列水溶液,最先沸腾的是( )A. 蔗糖(C 12H 22O 11)溶液B. 葡萄糖(C 6H 12O 6)溶液C. 丙三醇(C 3H 8O 3)溶液D. 尿素( (NH 2)2 CO )溶液解:选D 。
在等压下,最先沸腾就是指溶液的蒸气压最低。
根据难挥发非电解质稀溶液的依数性变化规律,溶液质量摩尔浓度增大,溶液的蒸气压下降。
这里,相同质量分数下,溶质的摩尔质量越小,质量摩尔浓度越大。
选项D 中非电解质尿素的摩尔质量最小,尿素溶液的质量摩尔浓度最大,蒸气压最低,在等压下最先沸腾。
2.0.1mol·kg -1下列水溶液中凝固点最低的是( )A. NaCl 溶液B. C 12H 22O 11溶液C. HAc 溶液D. H 2SO 4溶液解:选D 。
电解质溶液的依数性虽然不能用拉乌尔定律进行统一的定量计算,但仍然可以参照难挥发非电解质稀溶液的依数性进行定性描述。
即溶质的粒子数目增大,会引起溶液的蒸气压降低,沸点升高,凝固点下降和溶液的渗透压增大。
此题中,在相同质量摩尔浓度下,溶液中的粒子数目估算出来是H 2SO 4溶液最多,所以其凝固点最低。
3.胶体溶液中,决定溶胶电性的物质是( )A. 胶团B. 电位离子C. 反离子D. 胶粒解:选D 。
根据胶团结构,胶核和吸附层的整体称为胶粒,胶粒中反离子数比电位离子数少,故胶粒所带电荷与电位离子符号相同。
即胶粒带电,溶胶电性由胶粒决定。
4.溶胶具有聚结不稳定性,但经纯化后的Fe(OH)3溶胶可以存放数年而不聚沉,其原因是( )A. 胶体的布朗运动B. 胶体的丁铎尔效应C. 胶团有溶剂化膜D. 胶粒带电和胶团有溶剂化膜解:选D 。
溶胶具有动力学稳定性和聚结稳定性,而聚结稳定性是溶胶稳定的根本原因,它包含两个方面,胶粒带有相同电性的电荷,当靠近时会产生静电排斥,阻止胶粒聚结合并;而电位离子和反离子形成的溶剂化膜,也会阻隔胶粒的聚结合并。
第一章思考题和案例参考答案简答题参考答案:1.组织的活动有两类—作业活动和管理活动。
组织是直接通过作业活动来达成组织目标的,但组织为了确保这一基本过程顺利而有效的进行,还需要开展管理活动,管理是促进作业活动顺利实现组织目标的手段和保证。
参见教材P2-32.管理是一门科学,是指它以反映客观规律的管理理论和方法为指导,有一套分析问题、解决问题的科学的方法论。
管理学发展到今天,已经形成了比较系统的理论体系,揭示了一系列具有普遍应用价值的管理规律,总结出许多管理原则。
管理的艺术性,就是强调管理活动除了要掌握一定的理论和方法外,还要有灵活运用这些知识和技能的技巧和诀窍。
在管理实践中,不注重管理的科学性只强调管理工作的艺术性,这种艺术性将会表现为随意性;不注重管理工作的艺术性,管理科学将会是僵硬的教条。
管理的科学性来自于管理实践,管理的艺术性要结合具体情况并在管理实践中体现出来,二者是统一的。
参见教材P53.越是处于高层的管理者,越需要更多的概念技能和相对少的技术技能。
相比而言,基层管理者则正好相反;不同层次的管理者完成不同管理职能的重点有所不同,相对而言,高层管理者在计划、组织和控制上所花的时间要多于中层和基层管理者,在领导职能上所花的时间要少于中层和基层管理者。
参见教材P14和P11-124.对组织而言,每一项管理职能的展开,都是为了更好地促进协调。
有了协调,组织可以收到个人单独活动所不能收到的良好效果,从而达到1+1>2的协同效应。
参见教材P95.按照管理学家明茨伯格的观点,管理者从人际关系、信息传递和决策制定三个维度分别扮演10种不同的角色。
参见教材P9-106.环境是组织生存的土壤,它既为组织活动提供条件,也对组织活动其制约作用。
参见教材P10-167.企业的市场环境需要关注的主要要素是:现有竞争对手、潜在竞争对手、替代品生产厂家、用户和供应商。
参见教材P18-228.反映企业竞争实力的主要指标有三类:销售增长率、市场占有率和产品的获利能力。
单⽚机原理及应⽤张毅刚课后习题答案完整版第1章思考题及习题1参考答案⼀、填空1. 除了单⽚机这⼀名称之外,单⽚机还可称为或。
答:微控制器,嵌⼊式控制器.2.单⽚机与普通微型计算机的不同之处在于其将、、和三部分,通过内部连接在⼀起,集成于⼀块芯⽚上。
答:CPU、存储器、I/O⼝、总线3. AT89S52单⽚机⼯作频率上限为 MHz。
答:33 MHz。
4. 专⽤单⽚机已使系统结构最简化、软硬件资源利⽤最优化,从⽽⼤⼤降低和提⾼。
答:成本,可靠性。
⼆、单选1. 单⽚机内部数据之所以⽤⼆进制形式表⽰,主要是A.为了编程⽅便B.受器件的物理性能限制C.为了通⽤性D.为了提⾼运算速度答:B2. 在家⽤电器中使⽤单⽚机应属于微计算机的。
A.辅助设计应⽤B.测量、控制应⽤C.数值计算应⽤D.数据处理应⽤答: B3. 下⾯的哪⼀项应⽤,不属于单⽚机的应⽤范围。
A.⼯业控制 B.家⽤电器的控制 C.数据库管理 D.汽车电⼦设备答:C三、判断对错1. STC系列单⽚机是8051内核的单⽚机。
对2. AT89S52与AT89S51相⽐,⽚内多出了4KB的Flash程序存储器、128B的RAM、1个中断源、1个定时器(且具有捕捉功能)。
对3. 单⽚机是⼀种CPU。
错4. AT89S52单⽚机是微处理器。
错5. AT89C52⽚内的Flash程序存储器可在线写⼊,⽽AT89S52则不能。
错6. 为AT89C51单⽚机设计的应⽤系统板,可将芯⽚AT89C51直接⽤芯⽚AT89S51替换。
对7. 为AT89S51单⽚机设计的应⽤系统板,可将芯⽚AT89S51直接⽤芯⽚AT89S52替换。
对8. 单⽚机的功能侧重于测量和控制,⽽复杂的数字信号处理运算及⾼速的测控功能则是DSP的长处。
对四、简答1. 微处理器、微计算机、微处理机、CPU、单⽚机、嵌⼊式处理器它们之间有何区别答:微处理器、微处理机和CPU它们都是中央处理器的不同称谓,微处理器芯⽚本⾝不是计算机。
第一章思考题1.如何理解马克思主义物质观及其现代意义?答:一、如何理解物质观:1、马克思主义认为,物质是标志着客观实在的哲学范畴,它的唯一特性是客观实在性。
它不依赖于人的感觉而存在,通过人的感觉为人所感知、复写、摄影和反映。
2、物质是世界唯一的本源,物质第一性,意识第二性,意识是物质的产物,是物质世界的主观映象。
3、物质世界是联系的,发展的,发展的根本原因在于事物的内部矛盾。
4、时间与空间是物质运动的存在形式。
5、不仅自然界是物质的,人类社会也具有物质性,世界的真正统一性在于它的物质性。
二、马克思主义物质观至今都具有丰富而深刻的理论指导意义。
它坚持了物质的客观实在性原则和唯物主义一元论,同唯心主义一元论和二元论划清了界限;坚持了能动的反映论和可知论,有力地批判了不可知论;体现了唯物论和辩证法的统一、唯物主义自然观与唯物主义历史观的统一,为彻底的唯物主义奠定了理论基础。
世界的物质统一性是马克思主义哲学的基石。
我们通过实践改造客观物质世界,就要充分认识是物质是世界的本原,人的实践活动依赖于客观物质世界,而客观世界的规律性更制约着人的实践活动。
就要在马克思主义物质观指导下,正确认识和利用客观实际的发展规律,一切从实际出发,更好地认识和改造客观物质世界,以取得社会主义实践和各项事业的胜利。
2、如何理解“社会生活本质上是实践的?”试运用这一观点,说明中国特色社会主义道路,中国特色社会主义理论体系,中国特色社会主义制度三者是如何统一于中国特色社会主义伟大实践。
社会生活的实践性主要体现为三个方面:(一) 实践是社会关系形成的基础。
实践首先是物质生产实践,是人以自身的活动调整和控制人与自然之间物质变换的过程。
(二) 实践形成了社会生活的基本领域。
人们通过实践活动改造自然、改造社会和改造人自身,形成了社会生活的基本领域,即社会的物质生活、政治生活和精神生活领域。
(三) 实践构成了社会发展的动力。
人们自己创造自己的历史,首先是通过物质生产,所以说是社会发展的根本动力;当人类进入阶级社会后,社会基本矛盾集中地表现为阶级斗争,阶级斗争就成为阶级社会发展的直接动力;有阶级斗争就可能暴发社会革命,社会革命和改革是推动社会变迁和进步的重要力量;科学技术是推动社会发展的重要杠杆;历史主体是推动社会发展的决定力量。
第一章晶体的结构思 考 题1. 1. 以堆积模型计算由同种原子构成的同体积的体心和面心立方晶体中的原子数之比.[解答] 设原子的半径为R , 体心立方晶胞的空间对角线为4R , 晶胞的边长为3/4R , 晶胞的体积为()33/4R , 一个晶胞包含两个原子, 一个原子占的体积为()2/3/43R ,单位体积晶体中的原子数为()33/4/2R ; 面心立方晶胞的边长为2/4R , 晶胞的体积为()32/4R , 一个晶胞包含四个原子, 一个原子占的体积为()4/2/43R , 单位体积晶体中的原子数为()32/4/4R . 因此, 同体积的体心和面心立方晶体中的原子数之比为2/323⎪⎪⎭⎫ ⎝⎛=0.272.2. 2. 解理面是面指数低的晶面还是指数高的晶面?为什么?[解答]晶体容易沿解理面劈裂,说明平行于解理面的原子层之间的结合力弱,即平行解理面的原子层的间距大. 因为面间距大的晶面族的指数低, 所以解理面是面指数低的晶面.3. 3. 基矢为=1a i a , =2a aj , =3a ()k j i ++2a的晶体为何种结构? 若=3a ()k j +2a+i 23a , 又为何种结构? 为什么?[解答]有已知条件, 可计算出晶体的原胞的体积23321a =⨯⋅=a a a Ω.由原胞的体积推断, 晶体结构为体心立方. 按照本章习题14, 我们可以构造新的矢量=-=13a a u 2a()k j i ++-,=-=23a a v 2a()k j i +-,=-+=321a a a w 2a()k j i -+.w v u ,,对应体心立方结构. 根据14题可以验证, w v u ,,满足选作基矢的充分条件.可见基矢为=1a i a , =2a aj , =3a ()k j i ++2a的晶体为体心立方结构.若=3a ()k j +2a+i 23a ,则晶体的原胞的体积23321a Ω=⨯⋅=a a a ,该晶体仍为体心立方结构. 4. 4. 若321l l l R 与hkl R 平行, hkl R 是否是321l l l R 的整数倍? 以体心立方和面心立方结构证明之.[解答] 若321l l l R 与hkl R 平行, hkl R 一定是321l l l R的整数倍. 对体心立方结构, 由(1.2)式可知32a a a +=,13a a b +=, 21a a c +=,hkl R =h a +k b +l c =(k+l )+1a (l+h )+2a (h+k )3a =p 321l l l R =p (l 11a +l 22a +l 33a ), 其中p 是(k+l )、(l+h )和(h+k )的公约(整)数.对于面心立方结构, 由(1.3)式可知,321a a a a ++-=, =b 321a a a +-, =c 321a a a -+,hkl R =h a +k b +l c =(-h+k+l )1a +(h-k+l )2a +(h+k-l )3a =p ’321l l l R = p ’(l 11a +l 22a +l 33a ), 其中p ’是(-h+k+l )、(-k+h+l )和(h-k+l )的公约(整)数.5. 晶面指数为(123)的晶面ABC 是离原点O 最近的晶面,OA 、OB 和OC 分别与基矢1a 、2a 和3a 重合,除O 点外,OA 、OB 和OC 上是否有格点? 若ABC 面的指数为(234),情况又如何?[解答]晶面族(123)截1a 、2a 和3a 分别为1、2、3等份,ABC 面是离原点O 最近的晶面,OA 的长度等于1a 的长度,OB 的长度等于2a 的长度的1/2,OC 的长度等于3a 的长度的1/3,所以只有A 点是格点. 若ABC 面的指数为(234)的晶面族, 则A 、B 和C 都不是格点. 6. 6. 验证晶面(102),(111)和(012)是否属于同一晶带. 若是同一晶带, 其带轴方向的晶列指数是什么?[解答] 由习题12可知,若(102),(111)和(012)属于同一晶带, 则由它们构成的行列式的值必定为0.可以验证210111012=0,说明(102),(111)和(012)属于同一晶带.晶带中任两晶面的交线的方向即是带轴的方向. 由习题13可知, 带轴方向晶列[l 1l 2l 3]的取值为l 1=1101 =1, l 2=1120=2, l 3=1112=1.7.带轴为[001]的晶带各晶面,其面指数有何特点?[解答]带轴为[001]的晶带各晶面平行于[001]方向,即各晶面平行于晶胞坐标系的c 轴或原胞坐标系的3a 轴,各晶面的面指数形为(hk0)或(h 1h 20), 即第三个数字一定为0. 8. 8. 与晶列[l 1l 2l 3]垂直的倒格面的面指数是什么?[解答]正格子与倒格子互为倒格子. 正格子晶面(h 1h 2h 3)与倒格式=h K h 11b +h 22b +h 33b 垂直, 则倒格晶面(l 1l 2l 3)与正格矢=l R l 11a + l 22a + l 33a 正交. 即晶列[l 1l 2l 3]与倒格面(l 1l 2l 3) 垂直.9. 9. 在结晶学中, 晶胞是按晶体的什么特性选取的?[解答]在结晶学中, 晶胞选取的原则是既要考虑晶体结构的周期性又要考虑晶体的宏观对称性.10. 10.六角密积属何种晶系? 一个晶胞包含几个原子?[解答]六角密积属六角晶系, 一个晶胞(平行六面体)包含两个原子.11. 11.体心立方元素晶体, [111]方向上的结晶学周期为多大? 实际周期为多大?[解答]结晶学的晶胞,其基矢为c b a , ,,只考虑由格矢=R h a +k b +l c 构成的格点. 因此, 体心立方元素晶体[111]方向上的结晶学周期为a 3, 但实际周期为a 3/2. 12. 12.面心立方元素晶体中最小的晶列周期为多大? 该晶列在哪些晶面内?[解答]周期最小的晶列一定在原子面密度最大的晶面内. 若以密堆积模型, 则原子面密度最大的晶面就是密排面. 由图 1.9可知密勒指数(111)[可以证明原胞坐标系中的面指数也为(111)]是一个密排面晶面族, 最小的晶列周期为2/2a . 根据同族晶面族的性质, 周期最小的晶列处于{111}面内.13. 在晶体衍射中,为什么不能用可见光? [解答]晶体中原子间距的数量级为1010-米,要使原子晶格成为光波的衍射光栅,光波的波长应小于1010-米. 但可见光的波长为7.6−4.0710-⨯米, 是晶体中原子间距的1000倍. 因此, 在晶体衍射中,不能用可见光.14. 高指数的晶面族与低指数的晶面族相比, 对于同级衍射, 哪一晶面族衍射光弱? 为什么?[解答]对于同级衍射, 高指数的晶面族衍射光弱, 低指数的晶面族衍射光强. 低指数的晶面族面间距大, 晶面上的原子密度大, 这样的晶面对射线的反射(衍射)作用强. 相反, 高指数的晶面族面间距小, 晶面上的原子密度小, 这样的晶面对射线的反射(衍射)作用弱. 另外, 由布拉格反射公式λθn sin 2=hkl d 可知, 面间距hkl d 大的晶面, 对应一个小的光的掠射角θ. 面间距hkl d 小的晶面, 对应一个大的光的掠射角θ. θ越大, 光的透射能力就越强, 反射能力就越弱. 15. 温度升高时, 衍射角如何变化? X 光波长变化时, 衍射角如何变化?[解答]温度升高时, 由于热膨胀, 面间距hkl d 逐渐变大. 由布拉格反射公式λθn sin 2=hkl d 可知, 对应同一级衍射, 当X 光波长不变时, 面间距hkl d 逐渐变大, 衍射角θ逐渐变小.所以温度升高, 衍射角变小.当温度不变, X 光波长变大时, 对于同一晶面族, 衍射角θ随之变大.16. 面心立方元素晶体, 密勒指数(100)和(110)面, 原胞坐标系中的一级衍射, 分别对应晶胞坐标系中的几级衍射?[解答]对于面心立方元素晶体, 对应密勒指数(100)的原胞坐标系的面指数可由(1.34)式求得为(111), p ’=1. 由(1.33)式可知, hkl h K K 2=; 由(1.16)和(1.18)两式可知, 2/321hkl h h h d d =; 再由(1.26)和(1.27)两式可知, n ’=2n . 即对于面心立方元素晶体, 对应密勒指数(100)晶面族的原胞坐标系中的一级衍射, 对应晶胞坐标系中的二级衍射.对于面心立方元素晶体, 对应密勒指数(110)的原胞坐标系的面指数可由(1.34)式求得为(001), p ’=2. 由(1.33)式可知, hkl h K K =; 由(1.16)和(1.18)两式可知, hklh h h d d =321; 再由(1.26)和(1.27)两式可知, n ’=n , 即对于面心立方元素晶体, 对应密勒指数(110)晶面族的原胞坐标系中的一级衍射, 对应晶胞坐标系中的一级衍射.17. 由KCl 的衍射强度与衍射面的关系, 说明KCl 的衍射条件与简立方元素晶体的衍射条件等效.[解答]Cl 与K 是原子序数相邻的两个元素, 当Cl 原子俘获K 原子最外层的一个电子结合成典型的离子晶体后, -Cl 与+K 的最外壳层都为满壳层, 原子核外的电子数和壳层数都相同, 它们的离子散射因子都相同. 因此, 对X 光衍射来说, 可把-Cl 与+K 看成同一种原子. KCl 与NaCl 结构相同, 因此, 对X 光衍射来说, KCl 的衍射条件与简立方元素晶体等效.由KCl 的衍射强度与衍射面的关系也能说明KCl 的衍射条件与简立方元素晶体的衍射条件等效. 一个KCl 晶胞包含4个+K 离子和4个-Cl 离子,它们的坐标+K :(000)(02121)(21021)(21210)-Cl :(0021)(0210)(2100)(212121)由(1.45)式可求得衍射强度I hkl 与衍射面(hkl )的关系I hkl ={+K f[1+cos ++++++)](cos )(cos )(h l n l k n k h n πππ)]}(cos cos cos cos [-Cl l k h n nl nk nh f +++++ππππ由于+K f 等于-Cl f , 所以由上式可得出衍射面指数nl nk nh , ,全为偶数时, 衍射强度才极大.衍射面指数的平方和222)()()(nl nk nh ++: 4, 8, 12, 16, 20, 24…. 以上诸式中的n 由λθ=++sin )()()(2222nl nk nh a决定. 如果从X 光衍射的角度把KCl 看成简立方元素晶体, 则其晶格常数为='a 2/a , 布拉格反射公式化为λθ=++sin )'()'()'('2222l n k n h n a显然'2n n =, 衍射面指数平方和222)'()'()'(l n k n h n ++: 1, 2, 3, 4, 5, 6…. 这正是简立方元素晶体的衍射规律.18. 金刚石和硅、锗的几何结构因子有何异同?[解答]取几何结构因子的(1.44)表达式)(21j j j lw kv hu n i tj j hkl ef F ++=∑=π,其中u j ,v j ,w j 是任一个晶胞内,第j 个原子的位置矢量在c b a , ,轴上投影的系数. 金刚石和硅、锗具有相同的结构, 尽管它们的c b a , ,大小不相同, 但第j 个原子的位置矢量在c b a , ,轴上投影的系数相同. 如果认为晶胞内各个原子的散射因子jf 都一样, 则几何结构因子化为∑=++=tj lw kv hu n i hkl j j j ef F 1)(2π. 在这种情况下金刚石和硅、锗的几何结构因子的求和部分相同. 由于金刚石和硅、锗原子中的电子数和分布不同, 几何结构因子中的原子散射因子f 不会相同.19. 旋转单晶法中, 将胶片卷成以转轴为轴的圆筒, 胶片上的感光线是否等间距?[解答]旋转单晶法中, 将胶片卷成以转轴为轴的圆筒, 衍射线构成了一个个圆锥面. 如果胶tgR md m =ϕ.其中R 是圆筒半径, d 是假设等间距的感光线间距, ϕ是各个圆锥面与垂直于转轴的平面的夹角. 由该关系式可得sin 2221R d m R mdm +=ϕ, 即m ϕsin 与整数m 不成正比. 但可以证明222sin l k h a mp m ++=λϕ.即m ϕsin 与整数m 成正比(参见本章习题23). 也就是说, 旋转单晶法中, 将胶片卷成以转轴为轴的圆筒, 胶片上的感光线不是等间距的.20. 如图1.33所示, 哪一个衍射环感光最重? 为什么?[解答]最小衍射环感光最重. 由布拉格反射公式θnλd2=sinhkl可知, 对应掠射角θ最小的晶面族具有最大的面间距. 面间距最大的晶面上的原子密度最大, 这样的晶面对射线的反射(衍射)作用最强. 最小衍射环对应最小的掠射角,它的感光最重.。
第一章思考题及参考答案1. 无多余约束几何不变体系简单组成规则间有何关系?答:最基本的三角形规则,其间关系可用下图说明:图a 为三刚片三铰不共线情况。
图b 为III 刚片改成链杆,两刚片一铰一杆不共线情况。
图c 为I 、II 刚片间的铰改成两链杆(虚铰),两刚片三杆不全部平行、不交于一点的情况。
图d 为三个实铰均改成两链杆(虚铰),变成三刚片每两刚片间用一虚铰相连、三虚铰不共线的情况。
图e 为将I 、III 看成二元体,减二元体所成的情况。
2.实铰与虚铰有何差别?答:从瞬间转动效应来说,实铰和虚铰是一样的。
但是实铰的转动中心是不变的,而虚铰转动中心为瞬间的链杆交点,产生转动后瞬时转动中心是要变化的,也即“铰”的位置实铰不变,虚铰要发生变化。
3.试举例说明瞬变体系不能作为结构的原因。
接近瞬变的体系是否可作为结构? 答:如图所示AC 、CB 与大地三刚片由A 、B 、C三铰彼此相连,因为三铰共线,体系瞬变。
设该体系受图示荷载P F 作用,体系C 点发生微小位移δ,AC 、CB 分别转过微小角度α和β。
微小位移后三铰不再共线变成几何不变体系,在变形后的位置体系能平衡外荷P F ,取隔离体如图所示,则列投影平衡方程可得210 cos cos 0x F T T βα=−=∑,21P 0 sin sin y F T T F βα=+=∑由于位移δ非常小,因此cos cos1βα≈≈,sin , sin ββαα≈≈,将此代入上式可得 21T T T ≈=,()P P F T F T βαβα+==⇒∞+, 由此可见,瞬变体系受荷作用后将产生巨大的内力,没有材料可以经受巨大内力而不破坏,因而瞬变体系不能作为结构。
由上分析可见,虽三铰不共线,但当体系接近瞬变时,一样将产生巨大内力,因此也不能作为结构使用。
4.平面体系几何组成特征与其静力特征间关系如何?答:无多余约束几何不变体系↔静定结构(仅用平衡条件就能分析受力)有多余约束几何不变体系↔超静定结构(仅用平衡条件不能全部解决受力分析) 瞬变体系↔受小的外力作用,瞬时可导致某些杆无穷大的内力常变体系↔除特定外力作用外,不能平衡5. 系计算自由度有何作用?答:当W >0时,可确定体系一定可变;当W <0且不可变时,可确定第4章超静定次数;W =0又不能用简单规则分析时,可用第2章零载法分析体系可变性。
第一章权力思考题参考答案1.比较各种权力定义,给出你对权力的定义。
权力是政治学的核心概念。
本章第一节中“权力的定义”在说明“权力”一词的中英文字面含义的基础上,介绍了马克斯·韦伯、拉斯维尔、帕森斯、达尔等人对于权力概念的解释,给出了“权力”定义:“权力就是人际关系中的影响力,即社会行为主体(一个人或一些人、一个或一些组织和团体、一个或一些国家)对行为对象(其他人、其他组织或团体、其他国家)所施加的影响力。
这种影响力从行为主体的角度看,表现为一种支配能力,从行为客体的角度看,体现为一种被支配和服从的关系”,并从微观、中观和宏观三个层面予以说明。
结合这些知识,读者可以根据自己的体会,说明权力在不同层面、不同语境下的含义。
2.说明权力对于社会生活的积极意义。
通过收集和梳理不同时期政治思想家和政治学家对于权力的论述,可以阐释权力对于社会生活的积极意义。
对于社会生活而言,权力构成了社会生活和社会秩序的基础。
对于政治生活而言,权力是一切政治活动的核心,是组织社会、维持秩序、实现公共政策目标不可缺少的手段。
3.权力有什么特性?它与权威有何区别?根据一般教科书的解释,权力作为一种支配能力具有支配性、强制性、扩张性和排他性。
由此可见,权力既可以用来“求善”,也可以用来“作恶”。
约束权力,限制权力,监督权力,不过是为了确立权力使用的合理范围和方式,以保证权力的实施“弃恶从善”。
4. 权力划分有哪些标准和角度?本章第二节“权力的类型”专门讨论了权力分类的标准和角度。
在政治学研究中,以下分类是较为常见的:(1)依据社会生活的不同方面,将不同生活领域的权力现象区分为政治权力、经济权力、文化权力、宗教权力等;(2)从权力主体的视角出发,可以区分出个人权力、团体权力、政府权力、政党权力等;(3)从权力合理行使的范围视角考虑,可以区分为国家性的公共权力和社会性的公共权力等;(4)从权力结构的视角分析,可以区分出中央权力和地方权力、上级权力和下级权力等;(5)从权力功能的视角出发,可以划分通常所谓的立法权、司法权和行政权等;(6)从权力作用方式的视角看,可以区分为公开的权力和隐蔽的权力、制度化的权力和非制度化的权力;(7)从权力实施手段的视角考察,可以区分为强制性权力、奖惩性权力、规范性权力等;(8)从权力作用结果的视角分析,又可以划分出绝对权力和有限权力、集中的权力和分散的权力等。
第⼀章思考题答案第⼀章思考题答案1. 按⼀般化⼯产品⽣产过程和作⽤划分,化⼯⼯艺流程可概括为哪⼏个过程?按⼀般化⼯产品⽣产过程的划分和它们在流程中所担负的作⽤可概括为以下⼏个过程:(1)⽣产准备过程——原料⼯序包括反应所需的主要原料、氧化剂、氮化剂、溶剂、⽔等各种辅助原料的贮存、净化、⼲燥以及配制等等。
为了使原料符合进⾏化学反应所要求的状态和规格,根据具体情况,不同的原料需要经过净化、提浓、混合、乳化或粉碎(对固体原料)等多种不同的预处理。
(2)催化剂准备过程——催化剂⼯序包括反应使⽤的催化剂和各种助剂的制备、溶解、贮存、配制等。
(3)反应过程——反应⼯序是化学反应进⾏的场所,全流程的核⼼。
经过预处理的原料,在⼀定的温度、压⼒等条件下进⾏反应,以达到所要求的反应转化率和收率。
反应类型是多样的,可以是氧化、还原、复分解、磺化、异构化、聚合、焙烧等。
通过化学反应,获得⽬的产物或其混合物。
以反应过程为主,还要附设必要的加热、冷却、反应产物输送以及反应控制等。
(4)分离过程——分离⼯序将反应⽣成的产物从反应系统分离出来,进⾏精制、提纯、得到⽬的产品。
并将未反应的原料、溶剂以及随反应物带出的催化剂、副反应产物等分离出来,尽可能实现原料、溶剂等物料的循环使⽤。
分离精制的⽅法很多,常⽤的有冷凝、吸收、吸附、冷冻、蒸馏、精馏、萃取、膜分离、结晶、过滤和⼲燥等,对于不同⽣产过程可以有针对性的采⽤相应的分离精制⽅法。
(5)回收过程——回收⼯序对反应过程⽣成的⼀些副产物,或不循环的⼀些少量的未反应原料、溶剂,以及催化剂等物料均应有必要的精制处理以回收使⽤,因此要设置⼀系列分离、提纯操作,如精馏、吸收等。
(6)后加⼯过程——后处理⼯序将分离过程获得的⽬的产物按成品质量要求的规格、形状进⾏必要的加⼯制作,以及贮存和包装出⼚。
(7)辅助过程除了上述六个主要⽣产过程外,在流程中还有为回收能量⽽设的过程(如废热利⽤),为稳定⽣产⽽设的过程(如缓冲、稳压、中间贮存),为治理三废⽽设的过程(如废⽓焚烧)以及产品贮运过程等。
天然药物化学各章复习题及参考答案2022年8月复习思考题第一章复习思考题(一)一、名词解释1、高速逆流色谱技术2、超临界流体萃取技术3、超声波提取技术4、二次代谢过程二、以下每一道考题下面有A、B、C、D、四个备选答案。
请从中选择一个最佳答案。
1、纸层析属于分配层析,固定相为:()A.纤维素B.展开剂中极性较小的溶液C.展开剂中极性较大的溶液D.水2、硅胶色谱一般不适合于分离()A、香豆素类化合物B、生物碱类化合物C、酸性化合物D、酯类化合物3、比水重的亲脂性有机溶剂有:A.CHCl3B.苯C.Et2OD.石油醚4、利用溶剂较少提取有效成分较完全的方法是:A、连续回流法B、加热回流法C、渗漉法D、浸渍法5、由甲戊二羟酸演变而成的化合物类型是A.糖类B.萜类C.黄酮类D.木脂素类6、调节溶液的pH改变分子的存在状态影响溶解度而实现分离的方法有A.醇提水沉法B.铅盐沉淀法C.碱提酸沉法D.醇提丙酮沉法7、与水不分层的有机溶剂有:A.CHCl3B.丙酮C.Et2OD.正丁醇8、聚酰胺层析原理是A物理吸附B氢键吸附C分子筛效应D、化学吸附9、葡聚糖凝胶层析法属于排阻层析,在化合物分离过程中,先被洗脱下来的为:A.杂质 B.小分子化合物C.大分子化合物D.两者同时下来三、判断对错1、某结晶物质经硅胶薄层层析,用一种展开剂展开,呈单一斑点,所以该晶体为一单体。
()2、糖、蛋白质、脂质、核酸等为植物机体生命活动不可缺少的物质,因此称之为一次代谢产物。
()3、二氧化碳超临界流体萃取方法提取挥发油,具有防止氧化、热解及提高品质的突出优点。
()4、色谱法是分离中药成分单体最有效的方法()5、铅盐沉淀法常用于中药生产中除去杂质。
()6、植物成分的生物转化,可为一些化合物的结构修饰提供思路,提供新颖的先导化合物。
()9、凝胶色谱的原理是根据被分离分子含有羟基数目的不同达到分离,而不是根据分子量的差别()10、中草药中某些化学成分毒性很大。
毛概课后思考题答案(1-15章全开卷考试必备!)第一章思考习题1.如何正确认识提出马克思主义中国化的重要意义?“马克思主义中国化”这个命题是毛泽东1938年在题为《论新阶段》一文中最先提出的。
中国共产党在马克思主义中国化进程中,先后产生了毛泽东思想、邓小平理论和“三个代表”重要思想,称之为马克思主义中国化的三大理论成果。
提出马克思主义中国化具有重要意义:第一,马克思主义中国化的理论成果指引着党和人民的伟大事业不断取得胜利。
没有革命的理论就没有革命的实践。
第二,马克思主义中国化的理论成果提供了凝聚全党全国各族人民的强大精神支柱。
第三,马克思主义中国化倡导了对待马克思主义的科学态度和学风,开拓着马克思主义在中国发展的新境界。
2.怎样正确理解马克思主义中国化的科学内涵?马克思主义中国化,就是将马克思主义的基本原理同中国的具体实际相结合。
具体地说,“就是要使马克思列宁主义这一革命科学更进一步地和中国革命实践、中国历史、中国文化深相结合起来”,使马克思主义在其每一表现中都带有中国的特性,带有新鲜活泼的、为中国老百姓所喜闻乐见的中国作风和中国气派,使其在中国进一步民族化和具体化。
马克思主义的基本原理同中国的具体实际相结合的过程,一方面是在实践中学习和运用理论,用理论指导实践的过程;另一方面又是在总结实践经验的基础上深化对理论的认识并丰富和发展理论的过程。
概括地说,马克思主义中国化就是用马克思主义来解决中国的问题,同时又使中国丰富的实践经验上升为理论,并且同中国历史、中华民族优秀文化相结合,以形成具有中国特色、中国风格和中国气派的马克思主义理论。
3.怎样正确把握毛泽东思想、邓小平理论和“三个代表”重要思想各自形成发展的时代背景和实践基础?第一,毛泽东思想形成的时代背景和实践基础。
20世纪上半叶帝国主义战争与无产阶级革命的时代主题,是毛泽东思想形成的时代背景。
中国共产党领导的革命和建设的实践,是毛泽东思想形成的实践基础。
第一章思考题及参考答案
1. 无多余约束几何不变体系简单组成规则间有何关系?
答:最基本的三角形规则,其间关系可用下图说明:
图a 为三刚片三铰不共线情况。
图b 为III 刚片改成链杆,两刚片一铰一杆不共线情况。
图c 为I 、II 刚片间的铰改成两链杆(虚铰),两刚片三杆不全部平行、不交于一点的情况。
图d 为三个实铰均改成两链杆(虚铰),变成三刚片每两刚片间用一虚铰相连、三虚铰不共线的情况。
图e 为将I 、III 看成二元体,减二元体所成的情况。
2.实铰与虚铰有何差别?
答:从瞬间转动效应来说,实铰和虚铰是一样的。
但是实铰的转动中心是不变的,而虚铰转动中心为瞬间的链杆交点,产生转动后瞬时转动中心是要变化的,也即“铰”的位置实铰不变,虚铰要发生变化。
3.试举例说明瞬变体系不能作为结构的原因。
接近瞬变的体系是否可作为结构? 答:如图所示AC 、CB 与大地三刚片由A 、B 、C
三铰彼此相连,因为三铰共线,体系瞬变。
设该
体系受图示荷载P F 作用,体系C 点发生微小位移
δ,AC 、CB 分别转过微小角度α和β。
微小位移
后三铰不再共线变成几何不变体系,在变形后的位置体系能平衡外荷P F ,取隔离体如图所
示,则列投影平衡方程可得
210 cos cos 0x F T T βα=−=∑,21P 0 sin sin y F T T F βα=+=∑
由于位移δ非常小,因此cos cos
1βα≈≈,sin , sin ββαα≈≈,将此代入上式可得 21T T T ≈=,()P P F T F T βαβα
+==⇒∞+, 由此可见,瞬变体系受荷作用后将产生巨大的内力,没有材料可以经受巨大内力而不破坏,因而瞬变体系不能作为结构。
由上分析可见,虽三铰不共线,但当体系接近瞬变时,一样将产生巨大内力,因此也不能作为结构使用。
4.平面体系几何组成特征与其静力特征间关系如何?
答:无多余约束几何不变体系↔静定结构(仅用平衡条件就能分析受力)
有多余约束几何不变体系↔超静定结构(仅用平衡条件不能全部解决受力分析) 瞬变体系↔受小的外力作用,瞬时可导致某些杆无穷大的内力
常变体系↔除特定外力作用外,不能平衡
5. 系计算自由度有何作用?
答:当W >0时,可确定体系一定可变;当W <0且不可变时,可确定第4章超静定次数;W =0又不能用简单规则分析时,可用第2章零载法分析体系可变性。
6.作平面体系组成分析的基本思路、步骤如何?
答:分析的基本思路是先设法化简,找刚片看能用什么规则分析。
一般步骤:
1)仅三支杆(不全平行,不交一点)可化为内部可变性分析;有二元体,从体系中减去;从基本刚片加二元体找大刚片化简体系。
2)对化简后的体系看适合用什么规则分析并具体分析。
3)结论。
7.连接n根杆(或刚片)的复铰相当于多少单铰?
答:n根互不相连的杆有3n个自由度,用复铰联系后,确定一根杆有3个自由度,每增加一杆只增加一个转动自由度,因此复铰所连接的体系有3+(n-1)个自由度,可见复铰剥夺的自由度为2n-2=2(n-1)个。
因为单铰有两个联系,所以连n根杆的复铰相当于n-1个单铰。
8.连接n根杆(或刚片)的复刚结点相当于多少个单刚结点?
答:自由的n杆自由度3n,复刚结点只有3个自由度,故共剥夺3(n-1)个自由度。
一个单刚结点有3个联系,所以连n根杆的复刚结点相当于n-1个单刚结点。
9.接n根杆(或刚片)的复链杆相当于多少单链杆?
答:要连n根杆需有n个铰结点,完全自由时有2n个自由度。
用复链杆连接后只3个自由度,可见复链杆剥夺了2n-3个自由度。
单链杆只一个联系,所以此复链杆相当于2n-3个单链杆。
10.若三刚片三铰体系中的一个虚铰在无穷远处,何种情况下体系几何不变?何种情况下
体系常变?何种情况下体系瞬变?
答:如右图所示,不在无穷远处的两铰
(图中A、B,可以是实铰,也可以是虚
铰)连线与构成无穷远虚铰的两链杆不
平行,则将I刚片用杆代替后,II、III
两刚片间三杆不全部平行、不交于一点,
因此体系几何不变。
而如图所示,当构
成无穷远虚铰的两链杆与A、B连线平行时,若构成无穷远虚铰的两链杆与AB等长(也即三杆平行且等长),此时体系常变。
否则,体系瞬变。
11.若三刚片三铰体系中的两个虚铰在无穷远处,何种情况下体系是
几何不变的?何种情况下体系是常变的?何种情况下体系是瞬变的?
答:如果构成两个无穷远虚铰的四根链杆不平行,则两个在无穷远处
的虚铰与在有限远的虚铰或实铰不共线,体系几何不变。
而当构成两
个无穷远虚铰的四根链杆平行、等长且都在一刚片的同侧(如图所示),
则体系几何常变。
否则,体系瞬变。
12.若三刚片三铰体系中的三个虚铰均在无穷远处,体系一定是几何
可变吗?
答:一定是可变的。
因为三个无穷远虚铰在无穷远处共线。
但究竟是
常变还是瞬变要具体分析,如图所示体系是瞬变的。
而如果链杆都平
行等长,则将是常变的。
13.构成二元体的链杆可以是复链杆吗?
答:可以。
但必须与其相连的链杆除一根外都是可减去的二元体,当减去这些二元体后,此复链杆和保留的链杆满足二元体的定义。
否则就不可以。
14.超静定结构中的多余约束是从何角度被看成是“多余”的?
答:是从能否减少自由度的运动分析角度被看成“多余”的(也可称为从几何意义上是多余的)。
15.一个有3个多余约束的体系,其计算自由度为-2,该体系是否不变? 答:因为体系的自由度为231
=+=−+=,因此体系不可能是不变的。
n W S。