AC cycle dropout test guideline
- 格式:doc
- 大小:99.50 KB
- 文档页数:2

凝胶迁移阻滞实验(EMSA)实验操作方法及注意事项凝胶迁移阻滞实验(EMSA)转载丁香园大神的帖子!非常详细!EMSA实验技术作为一个经典的DNA/protein,RNA/protein的检测技术,不是很多简单的实验技术可以替代的! EMSA试验技术的独特性和复杂性决定了,要想做成功EMSA试验,拿到阳性结果可总结为一句话: 把握整体,注意细节!EMSA的整体性包括6大点:探针制备(设计,合成,标记,纯化,退火);个人实验设计(时间剃度浓度查阅文献等);核蛋白制备;浓度测定;EMSA 操作;实验时竞争设计. 这六大点都是会直接影响到EMSA试验的成功与否!简介:EMSA ( Electrophoretic Mobility Shift Assay ) 凝胶迁移实验是一种研究DNA与蛋白质或RNA与蛋白质相互作用的常用技术。
这项技术是基于DNA/蛋白质或RNA/蛋白质复合体在聚丙烯酰胺凝胶电泳(PAGE)中有不同迁移率的原理。
当核转录因子与一条人工合成的特异的DNA或RNA结合后,其在PAGE中的迁移率将小于未结合核蛋白转录因子的DNA,从而检测到活化的与DNA或RNA结合的蛋白转录或调节因子。
发展:从发展史来看,这项实验技术起初是用32P同位素标记人工合成的寡核苷酸形成探针,但是由于同位素的放射性很强,而且半衰期为14天,所以从定购到标记再到做完试验,必须14天完成,种种制约因素导致现代科技发展非同位素EMSA试验技术,这就出现了地高辛标记为探针的非放射EMSA实验技术.在实践中没多久,地高辛标记为探针的非放射EMSA实验技术就暴露了一个严重的缺陷,标记的探真纯化后灵敏度弱,导致实验结果的信号不行,最终就出现了现在的生物素标记探真的EMSA实验技术.配合化学发光技术良好的解决了灵敏度的问题,到目前为止, 生物素标记探真的EMSA实验技术广为应用!EMSA试验成功的关键因素:1.1.试验设计,主要是你用药品刺激细胞时,设计的药品浓度和时间剃度的问题,这个很关键,很多同学不注意这一点,最后试验确实是拿不到阳性结果,比如我一前一个朋友用药物处理SGC7901细胞,就是因为时间点设计的不好EMSA试验结果是阴性的,后来根据自己药品刺激的特性重新设计了刺激时间剃度,最终得到阳性结果! 所以这个设计很关键给一个个人的实验总结希望能帮助大家:一是受体结合类的直接刺激激活信号通路的方法,一般达到EMSA核转运高峰的时间比较短,大概控制在30min-2h之间,很多时候都是在45min和1h达到高峰,当然还有合适的浓度二是是你用的是药物刺激产生受体可能时间会长一些,因为药物还有一个渗透和刺激产生细胞因子的过程.时间可以长一些,主要根据自己的药物刺激特性确定时间点.2.核蛋白样品的制备;制备蛋白样品的关键是:1.注意用专用的和核蛋白抽提试剂来做,才能使制备的核蛋白保持蛋白原有的天然活性和构像.2.掌握好核蛋白的浓度和纯度,尤其是浓度. 能入核的蛋白本来就不是很多,所以核蛋白的浓度往往不会很高,但是EMSA试验对核蛋白的浓度要求还是听高的! 一般要求在1ug/ul以上!有时候稍微低于这个数量级也可以,但是不能太低,否则影响结合反应拿不到结果. 这就要求核蛋白抽提尽量避免核蛋白的损失.同时,一般制备核蛋白的材料为细胞和组织, 细胞要比组织好做的多,最重要的是用细胞得到核蛋白的纯度比组织要高很多. 而组织抽提后杂蛋白相对较多!杂蛋白多会影响试验结果不容易得到EMSA阳性结果!!3.探针的制备:又很多站友都在问我生物素标记到3’端还是5’端,其实我觉得最好还是两端都标记,这样才能更好的提高灵敏度, 国内的标记技术我还不是很了解,我们这边的探真都是国外定做的,还算可以,其制作程序如下: 合成寡核苷酸---标记生物素---纯化---退火合成双链.也是一个比较复杂的过程.4.EMSA实验技术. 这一点主要是操作的细节问题! 下面会更细的谈到.技术要点:关于技术要点,我在这里只提一下关键的几点需要注意的细节操作,其他的照正常程序就可以了!1. 制胶必须是非变性PAGE凝胶,我们实验室一般用6.5%的非变性胶.制胶很重要,直接影响电泳的效果!一般控制在5分钟凝固的效果.10X TBE 1.0ml40% Acrylamide(40%聚丙烯酰胺)3.3ml50% Glycerol(50%甘油)1.0mldH2O(蒸馏水)14.8mlTEMED(四甲基乙二氨)20μl脱气10min10% AP(过硫酸氨)120μl总量20.0ml2. 一般试剂盒包括的试剂l 10X Binding Buffer(10X 结合反应液)(-20 oC)l Poly (dI:dC) (dI:dC)(聚核苷酸竞争物)(-20 oC)l 6X Loading Buffer(10X 上样缓冲液)(4 oC)l Cold oligonucleotides(非标记竞争性寡核苷酸)(-20 oC)l Biotin-Labeled Probe(生物素标记探针)(-20 oC)l Streptavidin-HRP(链霉亲核素-HRP)(4oC)l 2×Blocking Buffer(2×封闭液)(4 oC)l 5×Washing Buffer(5×洗涤液)(4 oC)l Equilibration Solution(平衡液)(4 oC)l Binding-membrane(结合反应膜)(RT)3. 结合反应每次结合反应需1-5μl核蛋白(根据核蛋白浓度而定),根据不同的核提取物浓度加入核提取物用量,用双蒸蒸馏水将终体积调节到15μl (1)结合反应体系:10X 结合反应液1.5μlPoly(dI:dC)(dI:dC) 1.0μl细胞核提取物* ? μl双蒸水* ? μl混匀室温静置20 分钟生物素标记的探针0.5μl总量15μl混匀室温静置20分钟或以上。

Commission communication in the framework of the implementation of Directive 98/79/EC of the European Parliament and of the Council of 27 October 1998 on in-vitro diagnostic medical devices(Text with EEA relevance)(Publication of titles and references of harmonised standards under the Directive)(2009/C 293/04)Cenelec: Avenue Marnix 17, 1000 Brussels, BELGIUM, tel. +32 25196871, fax: +32 25196919 (http://www.cenelec.eu).ETSI: 650, route des Lucioles, 06921 Sophia Antipolis, FRANCE, tel. +33 492944200, fax: +33 493654716 (http://www.etsi.eu).Note 1: Generally the date of cessation of presumption of conformity will be the date of withdrawal (dow), set by the European Standardisation Organisation, but attention of users of thesestandards is drawn to the fact that in certain exceptional cases this can be otherwise.Note 2.1: The new (or amended) standard has the same scope as the superseded standard. On the date stated, the superseded standard ceases to give presumption of conformity with the essentialrequirements of the Directive.Note 2.2: The new standard has a broader scope than the superseded standard. On the date stated the superseded standard ceases to give presumption of conformity with the essential requirements ofthe Directive.Note 2.3: The new standard has a narrower scope than the superseded standard. On the date stated the (partially) superseded standard ceases to give presumption of conformity with the essentialrequirements of the Directive for those products that fall within the scope of the newstandard. Presumption of conformity with the essential requirements of the Directive forproducts that still fall within the scope of the (partially) superseded standard, but that do notfall within the scope of the new standard, is unaffected.Note 3: In case of amendments, the referenced standard is EN CCCCC:YYYY, its previous amendments, if any, and the new, quoted amendment. The superseded standard (column 3) therefore consists ofEN CCCCC:YYYY and its previous amendments, if any, but without the new quoted amendment.On the date stated, the superseded standard ceases to give presumption of conformity with theessential requirements of the Directive.NOTE:— Any information concerning the availability of the standards can be obtained either from the European Standardisation Organisations or from the national standardisation bodies of which the list is annexed to the Directive 98/34/EC of the European Parliament and of the Council (1) amended by the Directive 98/48/EC (2).— Publication of the references in the Official Journal of the European Union does not imply that the standards are available in all the Community languages.— This list replaces all the previous lists published in the Official Journal of the European Union. The Commission ensures the updating of this list.— More information about harmonised standards on the Internet at http://ec.europa.eu/enterprise/ newapproach/standardization/harmstds/(1) OJ L 204, 21.7.1998, p. 37.(2) OJ L 217, 5.8.1998, p. 18.。

A.C magnetic saturation 交流磁饱和Absorbed dose 吸收剂量Absorbed dose rate 吸收剂量率Acceptanc limits 验收范围Acceptance level 验收水平Acceptance standard 验收标准Accumulation test 累积检测Acoustic emission count〔emission count〕声发射计数〔发射计数〕Acoustic emission transducer 声发射换能器〔声发射传感器〕Acoustic emission<AE> 声发射Acoustic holography 声全息术Acoustic impedance 声阻抗Acoustic impedance matching 声阻抗匹配Acoustic impedance method 声阻法Acoustic wave 声波Acoustical lens 声透镜Acoustic—ultrasonic 声-超声〔AU〕Activation 活化Activity 活度Adequate shielding 安全屏蔽Ampere turns 安匝数Amplitude 幅度Angle beam method 斜射法Angle of incidence 入射角Angle of reflection 反射角Angle of spread 指向角Angle of squint 偏向角Angle probe 斜探头Angstrom unit 埃<A>Area amplitude response curve 面积幅度曲线Area of interest 评定区Arliflcial disconlinuity 人工不连续性Artifact 假缺陷Artificial defect 人工缺陷Artificial discontinuity 标准人工缺陷A-scan A型扫描A-scope; A-scan A型显示Attenuation coefficient 衰减系数Attenuator 衰减器Audible leak indicator 音响泄漏指示器Automatic testing 自动检测Autoradiography 自射线照片Avaluation 评定Barium concrete 钡混凝土Barn 靶Base fog 片基灰雾Bath 槽液Bayard- Alpert ionization gage B- A型电离计Beam 声束Beam ratio 光束比Beam angle 束张角Beam axis 声束轴线Beam index 声束入射点Beam path location 声程定位Beam path; path length 声程Beam spread 声束扩散Betatron 电子感应加速器Bimetallic strip gage 双金属片计Bipolar field 双极磁场Black light filter 黑光滤波器Black light; ultraviolet radiation 黑光Blackbody 黑体Blackbody equivalent temperature 黑体等效温度Bleakney mass spectrometer 波利克尼质谱仪Bleedout 渗出Bottom echo 底面回波Bottom surface 底面Boundary echo<first> 边界一次回波Bremsstrahlung 轫致辐射Broad-beam condition 宽射束Brush application 刷涂B-scan presenfation B型扫描显示B-scope; B-scan B型显示C- scan C型扫描Calibration,instrument 设备校准Capillary action 毛细管作用Carrier fluid 载液Carry over of penetrate 渗透剂移转Cassette 暗合Cathode 阴极Central conductor 中心导体Central conductor method 中心导体法Characteristic curve 特性曲线Characteristic curve of film 胶片特性曲线Characteristic radiation 特征辐射Chemical fog 化学灰雾Cine-radiography 射线<活动>电影摄影术Cintact pads 接触垫Circumferential coils 圆环线圈Circumferential field 周向磁场Circumferential magnetization method 周向磁化法Clean 清理Clean- up 清除Clearing time 定透时间Coercive force 矫顽力Coherence 相干性Coherence length 相干长度〔谐波列长度〕Coi1,test 测试线圈Coil size 线圈大小Coil spacing 线圈间距Coil technique 线圈技术Coil method 线圈法Coilreference 线圈参考Coincidence discrimination 符合鉴别Cold-cathode ionization gage 冷阴极电离计Collimator 准直器Collimation 准直Collimator 准直器bined colour trast and fluorescent penetrant 着色荧光渗透剂pressed air drying 压缩空气干燥pressional wave 压缩波pton scatter 康普顿散射Continuous emission 连续发射Continuous linear array 连续线阵Continuous method 连续法Continuous spectrum 连续谱Continuous wave 连续波Contract stretch 对比度宽限Contrast 对比度Contrast agent 对比剂Contrast aid 反差剂Contrast sensitivity 对比灵敏度Control echo 监视回波Control echo 参考回波Couplant 耦合剂Coupling 耦合Coupling losses 耦合损失Cracking 裂解Creeping wave 爬波Critical angle 临界角Cross section 横截面Cross talk 串音Cross-drilled hole 横孔Crystal 晶片C-scope; C-scan C型显示Curie point 居里点Curie temperature 居里温度Curie<Ci> 居里Current flow method 通电法Current induction method 电流感应法Current magnetization method 电流磁化法Cut-off level 截止电平Dead zone 盲区Decay curve 衰变曲线Decibel<dB> 分贝Defect 缺陷Defect resolution 缺陷分辨力Defect detection sensitivity 缺陷检出灵敏度Defect resolution 缺陷分辨力Definition 清晰度Definition, image definition 清晰度,图像清晰度Demagnetization 退磁Demagnetization factor 退磁因子Demagnetizer 退磁装置Densitometer 黑度计Density 黑度〔底片〕Density parison strip 黑度比较片Detecting medium 检验介质Detergent remover 洗净液Developer 显像剂Developer station 显像工位Developer, agueons 水性显象剂Developer, dry 干显象剂Developer, liquid film 液膜显象剂Developer, nonaqueous 〔sus- pendible〕非水〔可悬浮〕显象剂Developing time 显像时间Development 显影Diffraction mottle 衍射斑Diffuse indications 松散指示Diffusion 扩散Digital image acquisition system 数字图像识别系统Dilatational wave 膨胀波Dip and drain station 浸渍和流滴工位Direct contact magnetization 直接接触磁化Direct exposure imaging 直接曝光成像Direct contact method 直接接触法Directivity 指向性Discontinuity 不连续性Distance- gain- size-German AVG 距离- 增益- 尺寸〔DGS德文为AVG〕Distance marker; time marker 距离刻度Dose equivalent 剂量当量Dose rate meter 剂量率计Dosemeter 剂量计Double crystal probe 双晶片探头Double probe technique 双探头法Double transceiver technique 双发双收法Double traverse technique 二次波法Dragout 带出Drain time 滴落时间Drain time 流滴时间Drift 漂移Dry method 干法Dry powder 干粉Dry technique 干粉技术Dry developer 干显像剂Dry developing cabinet 干显像柜Dry method 干粉法Drying oven 干燥箱Drying station 干燥工位Drying time 干燥时间D-scope; D-scan D型显示Dual search unit 双探头Dual-focus tube 双焦点管Duplex-wire image quality indicator 双线像质指示器Duration 持续时间Dwell time 停留时间Dye penetrant 着色渗透剂Dynamic leak test 动态泄漏检测Dynamic leakage measurement 动态泄漏测量Dynamic range 动态范围Dynamic radiography 动态射线透照术Echo 回波Echo frequency 回波频率Echo height 回波高度Echo indication 回波指示Echo transmittance of sound pressure 往复透过率Echo width 回波宽度Eddy current 涡流Eddy current flaw detector 涡流探伤仪Eddy current testiog 涡流检测Edge 端面Edge effect 边缘效应Edge echo 棱边回波Edge effect 边缘效应Effective depth penetration 〔EDP〕有效穿透深度Effective focus size 有效焦点尺寸Effective magnetic permeability 有效磁导率Effective permeability 有效磁导率Effective reflection surface of flaw 缺陷有效反射面Effective resistance 有效电阻Elastic medium 弹性介质Electric displacement 电位移Electrical center 电中心Electrode 电极Electromagnet 电磁铁Electro-magnetic acoustic transducer 电磁声换能器Electromagnetic induction 电磁感应Electromagnetic radiation 电磁辐射Electromagnetic testing 电磁检测Electro-mechanical coupling factor 机电耦合系数Electron radiography 电子辐射照相术Electron volt 电子伏恃Electronic noise 电子噪声Electrostatic spraying 静电喷涂Emulsification 乳化Emulsification time 乳化时间Emulsifier 乳化剂Encircling coils 环绕式线圈End effect 端部效应Energizing cycle 激励周期Equalizing filter 均衡滤波器Equivalent 当量Equivalent I.Q. I. Sensitivity 象质指示器当量灵敏度Equivalent nitrogen pressure 等效氮压Equivalent penetrameter sensifivty 透度计当量灵敏度Equivalent method 当量法Erasabl optical medium 可探光学介质Etching 浸蚀Evaluation 评定Evaluation threshold 评价阈值Event count 事件计数Event count rate 事件计数率Examination area 检测范围Examination region 检验区域Exhaust pressure/discharge pressure 排气压力Exhaust tubulation 排气管道Expanded time-base sweep 时基线展宽Exposure 曝光Exposure table 曝光表格Exposure chart 曝光曲线Exposure fog 曝光灰雾Exposure,radiographic exposure 曝光,射线照相曝光Extended source 扩展源Facility scattered neutrons 条件散射中子False indication 假指示Family 族Far field 远场Feed-through coil 穿过式线圈Field, resultant magnetic 复合磁场Fill factor 填充系数Film speed 胶片速度Film badge 胶片襟章剂量计Film base 片基Film contrast 胶片对比度Film gamma 胶片γ值Film processing 胶片冲洗加工Film speed 胶片感光度Film unsharpness 胶片不清晰度Film viewing screen 观察屏Filter 滤波器/滤光板Final test 复探Flat-bottomed hole 平底孔Flat-bottomed hole equivalent 平底孔当量Flaw 伤Flaw characterization 伤特性Flaw echo 缺陷回波Flexural wave 弯曲波Floating threshold 浮动阀值Fluorescence 荧光Fluorescent examination method 荧光检验法Fluorescent magnetic particle inspection 荧光磁粉检验Fluorescent dry deposit penetrant 干沉积荧光渗透剂Fluorescent light 荧光Fluorescent magnetic powder 荧光磁粉Fluorescent penetrant 荧光渗透剂Fluorescent screen 荧光屏Fluoroscopy 荧光检查法Flux leakage field 磁通泄漏场Flux lines 磁通线Focal spot 焦点Focal distance 焦距Focus length 焦点长度Focus size 焦点尺寸Focus width 焦点宽度Focus<electron> 电子焦点Focused beam 聚焦声束Focusing probe 聚焦探头Focus-to-film distance<f.f.d> 焦点-胶片距离〔焦距〕Fog 底片灰雾Fog density 灰雾密度Footcandle 英尺烛光Freguency 频率Frequency constant 频率常数Fringe 干涉带Front distance 前沿距离Front distance of flaw 缺陷前沿距离Full- wave direct current〔FWDC〕全波直流Fundamental frequency 基频Furring 毛状迹痕Gage pressure 表压Gain 增益Gamma radiography γ射线透照术Gamma ray source γ射线源Gamma ray source container γ射线源容器Gamma rays γ射线Gamma-ray radiographic equipment γ射线透照装置Gap scanning 间隙扫查Gas 气体Gate 闸门Gating technique 选通技术Gauss 高斯Geiger-Muller counter 盖革.弥勒计数器Geometric unsharpness 几何不清晰度Gray<Gy> 戈瑞Grazing incidence 掠入射Grazing angle 掠射角Group velocity 群速度Half life 半衰期Half- wave current 〔HW〕半波电流Half-value layer<HVL> 半值层Half-value method 半波高度法Halogen 卤素Halogen leak detector 卤素检漏仪Hard X-rays 硬X射线Hard-faced probe 硬膜探头Harmonic analysis 谐波分析Harmonic distortion 谐波畸变Harmonics 谐频Head wave 头波Helium bombing 氦轰击法Helium drift 氦漂移Helium leak detector 氦检漏仪Hermetically tight seal 气密密封High vacuum 高真空High energy X-rays 高能X射线Holography <optical> 光全息照相Holography, acoustic 声全息Hydrophilic emulsifier 亲水性乳化剂Hydrophilic remover 亲水性洗净剂Hydrostatic text 流体静力检测Hysteresis 磁滞Hysteresis 磁滞IACS IACSID coil ID线圈Image definition 图像清晰度Image contrast 图像对比度Image enhancement 图像增强Image magnification 图像放大Image quality 图像质量Image quality indicator sensitivity 像质指示器灵敏度Image quality indicator<IQI>/image quality indication 像质指示器Imaging line scanner 图像线扫描器Immersion probe 液浸探头Immersion rinse 浸没清洗Immersion testing 液浸法Immersion time 浸没时间Impedance 阻抗Impedance plane diagram 阻抗平面图Imperfection 不完整性Impulse eddy current testing 脉冲涡流检测Incremental permeability 增量磁导率Indicated defect area 缺陷指示面积Indicated defect length 缺陷指示长度Indication 指示Indirect exposure 间接曝光Indirect magnetization 间接磁化Indirect magnetization method 间接磁化法Indirect scan 间接扫查Induced field 感应磁场Induced current method 感应电流法Infrared imaging system 红外成象系统Infrared sensing device 红外扫描器Inherent fluorescence 固有荧光Inherent filtration 固有滤波Initial permeability 起始磁导率Initial pulse 始脉冲Initial pulse width 始波宽度Inserted coil 插入式线圈Inside coil 内部线圈Inside- out testing 外泄检测Inspection 检查Inspection medium 检查介质Inspection frequency/ test frequency 检测频率Intensifying factor 增感系数Intensifying screen 增感屏Interal,arrival time 〔Δtij>/arrival time interval〔Δtij〕到达时间差<Δtij> Interface boundary 界面Interface echo 界面回波Interface trigger 界面触发Interference 干涉Interpretation 解释Ion pump 离子泵Ion source 离子源Ionization chamber 电离室Ionization potential 电离电位Ionization vacuum gage 电离真空计Ionography 电离射线透照术Irradiance, E 辐射通量密度, EIsolation 隔离检测Isotope 同位素K value K值Kaiser effect 凯塞<Kaiser>效应Kilo volt kv 千伏特Kiloelectron volt keV千电子伏特Krypton 85 氪85L/D ratio L/D比Lamb wave 兰姆波Latent image 潜象Lateral scan 左右扫查Lateral scan with oblique angle 斜平行扫查Latitude <of an emulsion> 胶片宽容度Lead screen 铅屏Leak 泄漏孔Leak artifact 泄漏器Leak detector 检漏仪Leak testtion 泄漏检测Leakage field 泄漏磁场Leakage rate 泄漏率Leechs 磁吸盘Lift-off effect 提离效应Light intensity 光强度Limiting resolution 极限分辨率Line scanner 线扫描器Line focus 线焦点Line pair pattern 线对检测图Line pairs per millimetre 每毫米线对数Linear <electron> accelerator<LINAC> 电子直线加速器Linear attenuation coefficient 线衰减系数Linear scan 线扫查Linearity 〔time or distance〕线性〔时间或距离〕Linearity, anplitude 幅度线性Lines of force 磁力线Lipophilic emulsifier 亲油性乳化剂Lipophilic remover 亲油性洗净剂Liquid penetrant examination 液体渗透检验Liquid film developer 液膜显像剂Local magnetization 局部磁化Local magnetization method 局部磁化法Local scan 局部扫查Localizing cone 定域喇叭筒Location 定位Location accuracy 定位精度Location puted 定位,计算Location marker 定位标记Location upon delta-T 时差定位Location, clusfer 定位,群集Location,continuous AE signal 定位,连续AE信号Longitudinal field 纵向磁场Longitudinal magnetization method 纵向磁化法Longitudinal resolution 纵向分辨率Longitudinal wave 纵波Longitudinal wave probe 纵波探头Longitudinal wave technique 纵波法Loss of back reflection 背面反射损失Loss of back reflection 底面反射损失Love wave 乐甫波Low energy gamma radiation 低能γ辐射Low-enerugy photon radiation 低能光子辐射Luminance 亮度Luminosity 流明Lusec 流西克Maga or million electron volts MeV兆电子伏特Magnetic history 磁化史Magnetic hysteresis 磁性滞后Magnetic particle field indication 磁粉磁场指示器Magnetic particle inspection flaw indications 磁粉检验的伤显示Magnetic circuit 磁路Magnetic domain 磁畴Magnetic field distribution 磁场分布Magnetic field indicator 磁场指示器Magnetic field meter 磁场计Magnetic field strength 磁场强度<H>Magnetic field/field,magnetic 磁场Magnetic flux 磁通Magnetic flux density 磁通密度Magnetic force 磁化力Magnetic leakage field 漏磁场Magnetic leakage flux 漏磁通Magnetic moment 磁矩Magnetic particle 磁粉Magnetic particle indication 磁痕Magnetic particle testing/magnetic particle examination 磁粉检测Magnetic permeability 磁导率Magnetic permeability 磁导率Magnetic pole 磁极Magnetic saturataion 磁饱和Magnetic saturation 磁饱和Magnetic slorage meclium 磁储介质Magnetic writing 磁写Magnetizing 磁化Magnetizing current 磁化电流Magnetizing coil 磁化线圈Magnetostrictive effect 磁致伸缩效应Magnetostrictive transducer 磁致伸缩换能器Main beam 主声束Manual testing 手动检测Markers 时标MA-scope; MA-scan MA型显示Masking 遮蔽Mass attuation coefficient 质量吸收系数Mass number 质量数Mass spectrometer 〔M.S.〕质谱仪Mass spectrometer leak detector 质谱检漏仪Mass spectrum 质谱Master/slave discrimination 主从鉴别MDTD 最小可测温度差Mean free path 平均自由程Medium vacuum 中真空Mega or million volt MV兆伏特Micro focus X - ray tube 微焦点X 光管Microfocus radiography 微焦点射线透照术Micrometre 微米Micron of mercury 微米汞柱Microtron 电子回旋加速器Milliampere 毫安〔mA〕Millimetre of mercury 毫米汞柱Minifocus x- ray tube 小焦点调射线管Minimum detectable leakage rate 最小可探泄漏率Minimum resolvable temperature difference 〔MRTD〕最小可分辨温度差〔MRDT〕Mode 波型Mode conversion 波型转换Mode transformation 波型转换Moderator 慢化器Modulation transfer function 〔MTF〕调制转换功能〔MTF〕Modulation analysis 调制分析Molecular flow 分子流Molecular leak 分子泄漏Monitor 监控器Monochromatic 单色波Movement unsharpness 移动不清晰度Moving beam radiography 可动射束射线透照术Multiaspect magnetization method 多向磁化法Multidirectional magnetization 多向磁化Multifrequency eddy current testiog 多频涡流检测Multiple back reflections 多次背面反射Multiple reflections 多次反射Multiple back reflections 多次底面反射Multiple echo method 多次反射法Multiple probe technique 多探头法Multiple triangular array 多三角形阵列Narrow beam condition 窄射束NC NCNear field 近场Near field length 近场长度Near surface defect 近表面缺陷Net density 净黑度Net density 净<光学>密度Neutron 中子Neutron radiograhy 中子射线透照Neutron radiography 中子射线透照术Newton 〔N〕牛顿Nier mass spectrometer 尼尔质谱仪Noise 噪声Noise 噪声Noise equivalent temperature difference 〔NETD〕噪声当量温度差〔NETD〕Nominal angle 标称角度Nominal frequency 标称频率Non-aqueous liquid developer 非水性液体显像剂Noncondensable gas 非冷凝气体Nondcstructivc Examination〔NDE〕无损试验Nondestructive Evaluation〔NDE〕无损评价Nondestructive Inspection〔NDI〕无损检验Nondestructive Testing〔NDT〕无损检测Nonerasble optical data 可固定光学数据Nonferromugnetic material 非铁磁性材料Nonrelevant indication 非相关指示Non-screen-type film 非增感型胶片Normal incidence 垂直入射〔亦见直射声束〕Normal permeability 标准磁导率Normal beam method; straight beam method 垂直法Normal probe 直探头Normalized reactance 归一化电抗Normalized resistance 归一化电阻Nuclear activity 核活性Nuclide 核素Object plane resolution 物体平面分辨率Object scattered neutrons 物体散射中子Object beam 物体光束Object beam angle 物体光束角Object-film distance 被检体-胶片距离Object一film distance 物体- 胶片距离Over development 显影过度Over emulsfication 过乳化Overall magnetization 整体磁化Overload recovery time 过载恢复时间Overwashing 过洗Oxidation fog 氧化灰雾P PPair production 偶生成Pair production 电子对产生Pair production 电子偶的产生Palladium barrier leak detector 钯屏检漏仪Panoramic exposure 全景曝光Parallel scan 平行扫查Paramagnetic material 顺磁性材料Parasitic echo 干扰回波Partial pressure 分压Particle content 磁悬液浓度Particle velocity 质点<振动>速度Pascal 〔Pa〕帕斯卡〔帕〕Pascal cubic metres per second 帕立方米每秒〔Pa•m3/s 〕Path length 光程长Path length difference 光程长度差Pattern 探伤图形Peak current 峰值电流Penetrameter 透度计Penetrameter sensitivity 透度计灵敏度Penetrant 渗透剂Penetrant parator 渗透对比试块Penetrant flaw detection 渗透探伤Penetrant removal 渗透剂去除Penetrant station 渗透工位Penetrant, water- washable 水洗型渗透剂Penetration 穿透深度Penetration time 渗透时间Permanent magnet 永久磁铁Permeability coefficient 透气系数Permeability,a-c 交流磁导率Permeability,d-c 直流磁导率Phantom echo 幻象回波Phase analysis 相位分析Phase angle 相位角Phase controlled circuit breaker 断电相位控制器Phase detection 相位检测Phase hologram 相位全息Phase sensitive detector 相敏检波器Phase shift 相位移Phase velocity 相速度Phase-sensitive system 相敏系统Phillips ionization gage 菲利浦电离计Phosphor 荧光物质Photo fluorography 荧光照相术Photoelectric absorption 光电吸收Photographic emulsion 照相乳剂Photographic fog 照相灰雾Photostimulable luminescence 光敏发光Piezoelectric effect 压电效应Piezoelectric material 压电材料Piezoelectric stiffness constant 压电劲度常数Piezoelectric stress constant 压电应力常数Piezoelectric transducer 压电换能器Piezoelectric voltage constant 压电电压常数Pirani gage 皮拉尼计Pirani gage 皮拉尼计Pitch and catch technique 一发一收法Pixel 象素Pixel size 象素尺寸Pixel, disply size 象素显示尺寸Planar array 平面阵<列>Plane wave 平面波Plate wave 板波Plate wave technique 板波法Point source 点源Post emulsification 后乳化Post emulsifiable penetrant 后乳化渗透剂Post-cleaning 后清除Post-cleaning 后清洗Powder 粉未Powder blower 喷粉器Powder blower 磁粉喷枪Pre-cleaning 预清理Pressure difference 压力差Pressure dye test 压力着色检测Pressure probe 压力探头Pressure testing 压力检测Pressure- evacuation test 压力抽空检测Pressure mark 压痕Pressure,design 设计压力Pre-test 初探Primary coil 一次线圈Primary radiation 初级辐射Probe gas 探头气体Probe test 探头检测Probe backing 探头背衬Probe coil 点式线圈Probe coil 探头式线圈Probe coil clearance 探头线圈间隙Probe index 探头入射点Probe to weld distance 探头-焊缝距离Probe/ search unit 探头Process control radiograph 工艺过程控制的射线照相Processing capacity 处理能力Processing speed 处理速度Prods 触头Projective radiography 投影射线透照术Proportioning probe 比例探头Protective material 防护材料Proton radiography 质子射线透照Pulse 脉冲波Pulse 脉冲Pulse echo method 脉冲回波法Pulse repetition rate 脉冲重复率Pulse amplitude 脉冲幅度Pulse echo method 脉冲反射法Pulse energy 脉冲能量Pulse envelope 脉冲包络Pulse length 脉冲长度Pulse repetition frequency 脉冲重复频率Pulse tuning 脉冲调谐Pump- out tubulation 抽气管道Pump-down time 抽气时间Q factor Q值Quadruple traverse technique 四次波法Quality <of a beam of radiation> 射线束的质Quality factor 品质因数Quenching 阻塞Quenching of fluorescence 荧光的猝灭Quick break 快速断间Rad<rad> 拉德Radiance, L 面辐射率,LRadiant existence, M 幅射照度MRadiant flux;radiant power,ψe辐射通量、辐射功率、ψe Radiation 辐射Radiation does 辐射剂量Radio frequency 〔r- f〕display 射频显示Radio- frequency mass spectrometer 射频质谱仪Radio frequency<r-f> display 射频显示Radiograph 射线底片Radiographic contrast 射线照片对比度Radiographic equivalence factor 射线照相等效系数Radiographic exposure 射线照相曝光量Radiographic inspection 射线检测Radiographic inspection 射线照相检验Radiographic quality 射线照相质量Radiographic sensitivity 射线照相灵敏度Radiographic contrast 射线底片对比度Radiographic equivalence factor 射线透照等效因子Radiographic inspection 射线透照检查Radiographic quality 射线透照质量Radiographic sensitivity 射线透照灵敏度Radiography 射线照相术Radiological examination 射线检验Radiology 射线学Radiometer 辐射计Radiometry 辐射测量术Radioscopy 射线检查法Range 量程Rayleigh wave 瑞利波Rayleigh scattering 瑞利散射Real image 实时图像Real-time radioscopy 实时射线检查法Rearm delay time 重新准备延时时间Rearm delay time 重新进入工作状态延迟时间Reciprocity failure 倒易律失效Reciprocity law 倒易律Recording medium 记录介质Recovery time 恢复时间Rectified alternating current 脉动直流电Reference block 参考试块Reference beam 参考光束Reference block 对比试块Reference block method 对比试块法Reference coil 参考线圈Reference line method 基准线法Reference standard 参考标准Reflection 反射Reflection coefficient 反射系数Reflection density 反射密度Reflector 反射体Refraction 折射Refractive index 折射率Refrence beam angle 参考光束角Reilbation 网纹Reject; suppression 抑制Rejection level 拒收水平Relative permeability 相对磁导率Relevant indication 相关指示Reluctance 磁阻Rem<rem> 雷姆Remote controlled testing 机械化检测Replenisers 补充剂Representative quality indicator 代表性质量指示器Residual magnetic field/field, residual magnetic 剩磁场Residual technique 剩磁技术Residual magnetic method 剩磁法Residual magnetism 剩磁Resistance 〔to flow〕气阻Resolution 分辨力Resonance method 共振法Response factor 响应系数Response time 响应时间Resultant field 复合磁场Resultant magnetic field 合成磁场Resultant magnetization method 组合磁化法Retentivity 顽磁性Reversal 反转现象Ring-down count 振铃计数Ring-down count rate 振铃计数率Rinse 清洗Rise time 上升时间Rise-time discrimination 上升时间鉴别Rod-anode tube 棒阳极管Roentgen<R> 伦琴Roof angle 屋顶角Rotational magnetic field 旋转磁场Rotational magnetic field method 旋转磁场法Rotational scan 转动扫查Roughing 低真空Roughing line 低真空管道Roughing pump 低真空泵S SSafelight 安全灯Sampling probe 取样探头Saturation 饱和Saturation,magnetic 磁饱和Saturation level 饱和电平Scan on grid lines 格子线扫查Scan pitch 扫查间距Scanning 扫查Scanning index 扫查标记Scanning directly on the weld 焊缝上扫查Scanning path 扫查轨迹Scanning sensitivity 扫查灵敏度Scanning speed 扫查速度Scanning zone 扫查区域Scattared energy 散射能量Scatter unsharpness 散射不清晰度Scattered neutrons 散射中子Scattered radiation 散射辐射Scattering 散射Schlieren system 施利伦系统Scintillation counter 闪烁计数器Scintillator and scintillating crystals 闪烁器和闪烁晶体Screen 屏Screen unsharpness 荧光增感屏不清晰度Screen-type film 荧光增感型胶片SE probe SE探头Search-gas 探测气体Second critical angle 第二临界角Secondary radiation 二次射线Secondary coil 二次线圈Secondary radiation 次级辐射Selectivity 选择性Semi-conductor detector 半导体探测器Sensitirity va1ue 灵敏度值Sensitivity 灵敏度Sensitivity of leak test 泄漏检测灵敏度Sensitivity control 灵敏度控制Shear wave 切变波Shear wave probe 横波探头Shear wave technique 横波法Shim 薄垫片Shot 冲击通电Side lobe 副瓣Side wall 侧面Sievert<Sv> 希<沃特>Signal 信号Signal gradient 信号梯度Signal over load point 信号过载点Signal overload level 信号过载电平Signal to noise ratio 信噪比Single crystal probe 单晶片探头Single probe technique 单探头法Single traverse technique 一次波法Sizing technique 定量法Skin depth 集肤深度Skin effect 集肤效应Skip distance 跨距Skip point 跨距点Sky shine<air scatter> 空中散射效应Sniffing probe 嗅吸探头Soft X-rays 软X射线Soft-faced probe 软膜探头Solarization 负感作用Solenoid 螺线管Soluble developer 可溶显像剂Solvent remover 溶剂去除剂Solvent cleaners 溶剂清除剂Solvent developer 溶剂显像剂Solvent remover 溶剂洗净剂Solvent-removal penetrant 溶剂去除型渗透剂Sorption 吸着Sound diffraction 声绕射Sound insulating layer 隔声层Sound intensity 声强Sound intensity level 声强级Sound pressure 声压Sound scattering 声散射Sound transparent layer 透声层Sound velocity 声速Source 源Source data label 放射源数据标签Source location 源定位Source size 源尺寸Source-film distance 射线源-胶片距离Spacial frequency 空间频率Spark coil leak detector 电火花线圈检漏仪Specific activity 放射性比度Specified sensitivity 规定灵敏度Standard 标准Standard 标准试样Standard leak rate 标准泄漏率Standard leak 标准泄漏孔Standard tast block 标准试块Standardization instrument 设备标准化Standing wave; stationary wave 驻波Step wedge 阶梯楔块Step- wadge calibration film 阶梯楔块校准底片Step- wadge parison film 阶梯楔块比较底片Step wedge 阶梯楔块Step-wedge calibration film 阶梯-楔块校准片Step-wedge parison film 阶梯-楔块比较片Stereo-radiography 立体射线透照术Subject contrast 被检体对比度Subsurface discontinuity 近表面不连续性Suppression 抑制Surface echo 表面回波Surface field 表面磁场Surface noise 表面噪声Surface wave 表面波Surface wave probe 表面波探头Surface wave technique 表面波法Surge magnetization 脉动磁化Surplus sensitivity 灵敏度余量Suspension 磁悬液Sweep 扫描Sweep range 扫描范围Sweep speed 扫描速度Swept gain 扫描增益Swivel scan 环绕扫查System exanlillatien threshold 系统检验阈值System inclacel artifacts 系统感生物System noise 系统噪声Tackground, target 目标本底Tandem scan 串列扫查Target 耙Target 靶Television fluoroscopy 电视X射线荧光检查Temperature envelope 温度范围Tenth-value-layer<TVL> 十分之一值层Test coil 检测线圈Test quality level 检测质量水平Test ring 试环Test block 试块Test frequency 试验频率Test piece 试片Test range 探测范围Test surface 探测面Testing,ulrasonic 超声检测Thermal neutrons 热中子Thermocouple gage 热电偶计Thermogram 热谱图Thermography, infrared 红外热成象Thermoluminescent dosemeter<TLD> 热释光剂量计Thickness sensitivity 厚度灵敏度Third critiical angle 第三临界角Thixotropic penetrant 摇溶渗透剂Thormal resolution 热分辨率Threading bar 穿棒Three way sort 三档分选Threshold setting 门限设置Threshold fog 阈值灰雾Threshold level 阀值Threshotd tet 门限电平Throttling 节流Through transmission technique 穿透技术Through penetration technique 贯穿渗透法Through transmission technique; transmission technique 穿透法Through-coil technique 穿过式线圈技术Throughput 通气量Tight 密封Total reflection 全反射Totel image unsharpness 总的图像不清晰度Tracer probe leak location 示踪探头泄漏定位Tracer gas 示踪气体Transducer 换能器/传感器Transition flow 过渡流Translucent base media 半透明载体介质Transmission 透射Transmission densitomefer 发射密度计Transmission coefficient 透射系数Transmission point 透射点Transmission technique 透射技术Transmittance,τ透射率τTransmitted film density 检测底片黑度Transmitted pulse 发射脉冲Transverse resolution 横向分辨率Transverse wave 横波Traveling echo 游动回波Travering scan; depth scan 前后扫查Triangular array 正三角形阵列Trigger/alarm condition 触发/报警状态Trigger/alarm level 触发/报警标准Triple traverse technique 三次波法True continuous technique 准确连续法技术Trueattenuation 真实衰减Tube current 管电流Tube head 管头Tube shield 管罩Tube shutter 管子光闸Tube window 管窗Tube-shift radiography 管子移位射线透照术Two-way sort 两档分选Ultra- high vacuum 超高真空Ultrasonic leak detector 超声波检漏仪Ultrasonic noise level 超声噪声电平Ultrasonic cleaning 超声波清洗Ultrasonic field 超声场Ultrasonic flaw detection 超声探伤Ultrasonic flaw detector 超声探伤仪Ultrasonic microscope 超声显微镜Ultrasonic spectroscopy 超声频谱Ultrasonic testing system 超声检测系统Ultrasonic thickness gauge 超声测厚仪Ultraviolet radiation 紫外辐射Under development 显影不足Unsharpness 不清晰Useful density range 有效光学密度范围UV-A A类紫外辐射UV-A filter A类紫外辐射滤片Vacuum 真空Vacuum cassette 真空暗盒Vacuum testing 真空检测Vacuum cassette 真空暗合Van de Graaff generator 范德格喇夫起电机Vapor pressure 蒸汽压Vapour degreasing 蒸汽除油Variable angle probe 可变角探头Vee path V型行程Vehicle 载体Vertical linearity 垂直线性Vertical location 垂直定位Visible light 可见光Vitua limage 虚假图像Voltage threshold 电压阈值Voltage threshold 阈值电压Wash station 水洗工位Water break test 水膜破坏试验Water column coupling method 水柱耦合法Water column probe 水柱耦合探头Water path; water distance 水程Water tolerance 水容限Water-washable penetrant 可水洗型渗透剂Wave 波Wave guide acoustic emission 声发射波导杆Wave train 波列Wave from 波形Wave front 波前Wave length 波长Wave node 波节Wave train 波列Wedge 斜楔Wet slurry technique 湿软磁膏技术Wet technique 湿法技术Wet method 湿粉法Wetting action 润湿作用Wetting action 润湿作用Wetting agents 润湿剂Wheel type probe; wheel search unit 轮式探头White light 白光White X-rays 连续X射线Wobble 摆动Wobble effect 抖动效应Working sensitivity 探伤灵敏度。
MPU-6881 Product Specification Revision 1.0TABLE OF CONTENTSTABLE OF FIGURES (4)TABLE OF TABLES (5)1DOCUMENT INFORMATION (6)1.1R EVISION H ISTORY (6)1.2P URPOSE AND S COPE (7)1.3P RODUCT O VERVIEW (7)1.4A PPLICATIONS (7)2FEATURES (8)2.1G YROSCOPE F EATURES (8)2.2A CCELEROMETER F EATURES (8)2.3A DDITIONAL F EATURES (8)3ELECTRICAL CHARACTERISTICS (9)3.1G YROSCOPE S PECIFICATIONS (9)3.2A CCELEROMETER S PECIFICATIONS (10)3.3E LECTRICAL S PECIFICATIONS (11)3.4I2C T IMING C HARACTERIZATION (15)3.5SPI T IMING C HARACTERIZATION (16)3.6A BSOLUTE M AXIMUM R ATINGS (18)4APPLICATIONS INFORMATION (19)4.1P IN O UT D IAGRAM AND S IGNAL D ESCRIPTION (19)4.2T YPICAL O PERATING C IRCUIT (20)4.3B ILL OF M ATERIALS FOR E XTERNAL C OMPONENTS (20)4.4B LOCK D IAGRAM (21)4.5O VERVIEW (21)4.6T HREE-A XIS MEMS G YROSCOPE WITH 16-BIT ADC S AND S IGNAL C ONDITIONING (22)4.7T HREE-A XIS MEMS A CCELEROMETER WITH 16-BIT ADC S AND S IGNAL C ONDITIONING (22)4.8I2C AND SPI S ERIAL C OMMUNICATIONS I NTERFACES (22)4.9S ELF-T EST (24)4.10C LOCKING (25)4.11S ENSOR D ATA R EGISTERS (25)4.12FIFO (25)4.13I NTERRUPTS (25)4.14D IGITAL-O UTPUT T EMPERATURE S ENSOR (25)4.15B IAS AND LDO S (26)4.16C HARGE P UMP (26)4.17S TANDARD P OWER M ODES (26)5PROGRAMMABLE INTERRUPTS (27)6DIGITAL INTERFACE (28)6.1I2C AND SPI S ERIAL I NTERFACES (28)6.2I2C I NTERFACE (28)6.3I2C C OMMUNICATIONS P ROTOCOL (28)6.4I2C T ERMS (31)6.5SPI I NTERFACE (32)7SERIAL INTERFACE CONSIDERATIONS (32)7.1MPU-6881S UPPORTED I NTERFACES (33)8ASSEMBLY (34)8.1O RIENTATION OF A XES (34)8.2P ACKAGE D IMENSIONS (35)9PART NUMBER PACKAGE MARKING (36)10RELIABILITY (37)10.1Q UALIFICATION T EST P OLICY (37)10.2Q UALIFICATION T EST P LAN (37)11REFERENCE (38)Table of FiguresFigure 1 I2C Bus Timing Diagram (15)Figure 2 SPI Bus Timing Diagram (16)Figure 3 Pin out Diagram for MPU-6881 3.0x3.0x0.9mm QFN (19)Figure 4 MPU-6881 QFN Application Schematic. (a) I2C operation, (b) SPI operation. (20)Figure 5 MPU-6881 Block Diagram (21)Figure 6 MPU-6881 Solution Using I2C Interface (23)Figure 7 MPU-6881 Solution Using SPI Interface (24)Figure 8 START and STOP Conditions (29)Figure 9 Acknowledge on the I2C Bus (29)Figure 10 Complete I2C Data Transfer (30)Figure 11 Typical SPI Master / Slave Configuration (32)Figure 12 I/O Levels and Connections (33)Figure 13 Orientation of Axes Sensitivity and Polarity of Rotation (34)Table of TablesTable 1 Gyroscope Specifications (9)Table 2 Accelerometer Specifications (10)Table 3 D.C. Electrical Characteristics (11)Table 4 A.C. Electrical Characteristics (13)Table 5 Other Electrical Specifications (14)Table 6 I2C Timing Characteristics (15)Table 7 SPI Timing Characteristics (16)Table 8 fCLK = 20MHz (17)Table 9 Absolute Maximum Ratings (18)Table 10 Signal Descriptions (19)Table 11 Bill of Materials (20)Table 12 Standard Power Modes for MPU-6881 (26)Table 13 Table of Interrupt Sources (27)Table 14 Serial Interface (28)Table 15 I2C Terms (31)1 Document Information1.2 Purpose and ScopeThis document is a preliminary product specification, providing a description, specifications, and design related information on the MPU-6881™ MotionTracking device. The device is housed in a small 3x3x0.9mm 24-pin QFN package.Specifications are subject to change without notice. Final specifications will be updated based upon characterization of production silicon. For references to register map and descriptions of individual registers, please refer to the MPU-6881 Register Map and Register Descriptions document.1.3 Product OverviewThe MPU-6881 is a 6-axis MotionTracking device that combines a 3-axis gyroscope, and a 3-axis accelerometer in a small 3x3x0.9mm (24-pin QFN) package. It also features a 4096-byte FIFO that can lower the traffic on the serial bus interface, and reduce power consumption by allowing the system processor to burst read sensor data and then go into a low-power mode. With its dedicated I2C sensor bus, the MPU-6881 directly accepts inputs from external I2C devices. MPU-6881, with its 6-axis integration, enables manufacturers to eliminate the costly and complex selection, qualification, and system level integration of discrete devices, guaranteeing optimal motion performance for consumers. MPU-6881 is also designed to interface with multiple non-inertial digital sensors, such as pressure sensors, on its auxiliary I2C port.The gyroscope has a programmable full-scale range of ±250, ±500, ±1000, and ±2000 degrees/sec. The accelerometer has a user-programmable accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g. Factory-calibrated initial sensitivity of both sensors reduces production-line calibration requirements.Other industry-leading features include on-chip 16-bit ADCs, programmable digital filters, a precision clock with 1% drift from -40°C to 85°C, an embedded temperature sensor, and programmable interrupts. The device features I2C and SPI serial interfaces, a VDD operating range of 1.71 to 3.45V, and a separate digital IO supply, VDDIO from 1.71V to 3.45V.Communication with all registers of the device is performed using either I2C at 400kHz or SPI at 1MHz. For applications requiring faster communications, the sensor and interrupt registers may be read using SPI at 20MHz.By leveraging its patented and volume-proven CMOS-MEMS Fabrication platform, which integrates MEMS wafers with companion CMOS electronics through wafer-level bonding, InvenSense has driven the package size down to a footprint and thickness of 3x3x0.9mm (24-pin QFN), to provide a very small yet high performance low cost package. The device provides high robustness by supporting 10,000g shock reliability.1.4 Applications∙TouchAnywhere™ technology (for “no touch” UI Application Control/Navigation)∙MotionCommand™ technology (for Gesture S hort-cuts)∙Motion-enabled game and application framework∙Location based services, points of interest, and dead reckoning∙Handset and portable gaming∙Motion-based game controllers∙3D remote controls for Internet connected DTVs and set top boxes, 3D mice∙Wearable sensors for health, fitness and sports2 Features2.1 Gyroscope FeaturesThe triple-axis MEMS gyroscope in the MPU-6881 includes a wide range of features:∙Digital-output X-, Y-, and Z-axis angular rate sensors (gyroscopes) with a user-programmable full-scale range of ±250, ±500, ±1000, and ±2000°/sec and integrated 16-bit ADCs ∙Digitally-programmable low-pass filter∙Gyroscope operating current: 3.2mA∙Factory calibrated sensitivity scale factor∙Self-test2.2 Accelerometer FeaturesThe triple-axis MEMS accelerometer in MPU-6881 includes a wide range of features:∙Digital-output X-, Y-, and Z-axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g and integrated 16-bit ADCs∙Accelerometer normal operating current: 450µA∙Low power accelerometer mode current: 7.27µA at 0.98Hz, 18.65µA at 31.25Hz∙User-programmable interrupts∙Wake-on-motion interrupt for low power operation of applications processor∙Self-test2.3 Additional FeaturesThe MPU-6881 includes the following additional features:∙Auxiliary master I2C bus for reading data from external sensors (e.g. magnetometer)∙ 3.4mA operating current when all 6 motion sensing axes are active∙VDD supply voltage range of 1.8 – 3.3V ± 5%∙VDDIO reference voltage of 1.8 – 3.3V ± 5% for auxiliary I2C devices∙Smallest and thinnest QFN package for portable devices: 3x3x0.9mm (24-pin QFN)∙Minimal cross-axis sensitivity between the accelerometer and gyroscope axes∙4096 byte FIFO buffer enables the applications processor to read the data in bursts∙Digital-output temperature sensor∙User-programmable digital filters for gyroscope, accelerometer, and temp sensor∙10,000 g shock tolerant∙400kHz Fast Mode I2C for communicating with all registers∙1MHz SPI serial interface for communicating with all registers∙20MHz SPI serial interface for reading sensor and interrupt registers∙MEMS structure hermetically sealed and bonded at wafer level∙RoHS and Green compliant3 Electrical Characteristics3.1 Gyroscope SpecificationsTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Please refer to the following document for information on Self-Test: MPU-6500 Accelerometer and Gyroscope Self-Test Implementation; AN-MPU-6500A-02.Table 1 Gyroscope SpecificationsNotes:1. Derived from validation or characterization of parts, not guaranteed in production.3.2 Accelerometer SpecificationsTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Please refer to the following document for information on Self-Test: MPU-6500 Accelerometer and Gyroscope Self-Test Implementation; AN-MPU-6500A-02.Table 2 Accelerometer SpecificationsNotes:1. Derived from validation or characterization of parts, not guaranteed in production.3.3 Electrical Specifications3.3.1 D.C. Electrical CharacteristicsTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 3 D.C. Electrical CharacteristicsNotes:1. Derived from validation or characterization of parts, not guaranteed in production.2. Accelerometer Low Power Mode supports the following output data rates (ODRs): 0.24, 0.49, 0.98,1.95, 3.91, 7.81, 15.63, 31.25, 62.50, 125, 250, 500Hz. Supply current for any update rate can becalculated as:a. Supply Current in µA = 6.9 + Update Rate * 0.3763.3.2 A.C. Electrical CharacteristicsTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 4 A.C. Electrical CharacteristicsNotes:1. Derived from validation or characterization of parts, not guaranteed in production.3.3.3 Other Electrical SpecificationsTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 5 Other Electrical SpecificationsNotes:1. Derived from validation or characterization of parts, not guaranteed in production.3.4 I2C Timing CharacterizationTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 6 I2C Timing CharacteristicsNotes:1.Timing Characteristics apply to both Primary and Auxiliary I2C Bus2.Based on characterization of 5 parts over temperature and voltage as mounted on evaluation board or in socketsFigure 1 I2C Bus Timing Diagram3.5 SPI Timing CharacterizationTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 7 SPI Timing CharacteristicsNotes:3.Based on characterization of 5 parts over temperature and voltage as mounted on evaluation board or in socketsFigure 2 SPI Bus Timing Diagram3.5.1 fSCLK = 20MHzTable 8 fCLK = 20MHzNotes:1.Based on characterization of 5 parts over temperature and voltage as mounted on evaluation board or in sockets3.6 Absolute Maximum RatingsStress above those listed as “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only and functional operation of the device at these conditions is not implied. Exposure to the absolute maximum ratings conditions for extended periods may affect device reliability.Table 9 Absolute Maximum Ratings4 Applications Information4.1Pin Out Diagram and Signal DescriptionTable 10 Signal DescriptionsA U X _C LV D D I OS D O / A D 0R E G O U TF S Y N CI N TS C L / S C L Kn C SR E S V S D A / S D IA U X _D AR E S VNC NC NC NC NC NCFigure 3 Pin out Diagram for MPU-6881 3.0x3.0x0.9mm QFN4.2Typical Operating Circuit– 3.3VDC m F1.8 –AD0– 3.3VDC m F1.8 –SD0(a)(b)Figure 4 MPU-6881 QFN Application Schematic. (a) I2C operation, (b) SPI operation.4.3Bill of Materials for External Components Table 11 Bill of Materials4.4 Block DiagramVDD GND PLLFILTFigure 5 MPU-6881 Block Diagram4.5 OverviewThe MPU-6881 is comprised of the following key blocks and functions:∙Three-axis MEMS rate gyroscope sensor with 16-bit ADCs and signal conditioning ∙Three-axis MEMS accelerometer sensor with 16-bit ADCs and signal conditioning ∙Primary I2C and SPI serial communications interfaces∙Auxiliary I2C serial interface∙Self-Test∙Clocking∙Sensor Data Registers∙FIFO∙Interrupts∙Digital-Output Temperature Sensor∙Bias and LDOs∙Charge Pump∙Standard Power Modes4.6 Three-Axis MEMS Gyroscope with 16-bit ADCs and Signal ConditioningThe MPU-6881 consists of three independent vibratory MEMS rate gyroscopes, which detect rotation about the X-, Y-, and Z- Axes. When the gyros are rotated about any of the sense axes, the Coriolis Effect causes a vibration that is detected by a capacitive pickoff. The resulting signal is amplified, demodulated, and filtered to produce a voltage that is proportional to the angular rate. This voltage is digitized using individual on-chip 16-bit Analog-to-Digital Converters (ADCs) to sample each axis. The full-scale range of the gyro sensors may be digitally programmed to ±250, ±500, ±1000, or ±2000 degrees per second (dps). The ADC sample rate is programmable from 8,000 samples per second, down to 3.9 samples per second, and user-selectable low-pass filters enable a wide range of cut-off frequencies.4.7 Three-Axis MEMS Accelerometer with 16-bit ADCs and Signal ConditioningThe MPU-6881’s 3-Axis accelerometer uses separate proof masses for each axis. Acceleration along a particular axis induces displacement on the corresponding proof mass, and capacitive sensors detect the displacement differentially. The MPU-6881’s architecture reduces the accelerometers’ susceptibility to fabrication variations as well as to thermal drift. When the device is placed on a flat surface, it will measure 0g on the X- and Y-axes and +1g on the Z-axis. The accelerometer s’ scale factor is calibrated at the factory and is nominally independent of supply voltage. Each sensor has a dedicated sigma-delta ADC for providing digital outputs. The full scale range of the digital output can be adjusted to ±2g, ±4g, ±8g, or ±16g.4.8 I2C and SPI Serial Communications InterfacesThe MPU-6881 communicates to a system processor using either a SPI or an I2C serial interface. The MPU-6881 always acts as a slave when communicating to the system processor. The LSB of the of the I2C slave address is set by pin 4 (AD0).4.8.1 MPU-6881 Solution Using I2C InterfaceIn the figure below, the system processor is an I2C master to the MPU-6881.Figure 6 MPU-6881 Solution Using I2C Interface4.8.2 MPU-6881 Solution Using SPI InterfaceIn the figure below, the system processor is an SPI master to the MPU-6881. Pins 2, 3, 4, and 5 are used to support the SCLK, SDI, SDO, and CS signals for SPI communications.Figure 7 MPU-6881 Solution Using SPI Interface4.9 Self-TestPlease refer to the register map document for more details on self-test.Self-test allows for the testing of the mechanical and electrical portions of the sensors. The self-test for each measurement axis can be activated by means of the gyroscope and accelerometer self-test registers (registers 13 to 16).When the self-test is activated, the electronics cause the sensors to be actuated and produce an output signal. The output signal is used to observe the self-test response.The self-test response is defined as follows:Self-test response = Sensor output with self-test enabled – Sensor output without self-test enabled The self-test response for each gyroscope axis is defined in the gyroscope specification table, while that for each accelerometer axis is defined in the accelerometer specification table.When the value of the self-test response is within the specified min/max limits of the product specification, the part has passed self-test. When the self-test response exceeds the min/max values, the part is deemed to have failed self-test. It is recommended to use InvenSense MotionApps software for executing self-test.4.10 ClockingThe MPU-6881 has a flexible clocking scheme, allowing a variety of internal clock sources to be used for the internal synchronous circuitry. This synchronous circuitry includes the signal conditioning and ADCs, and various control circuits and registers. An on-chip PLL provides flexibility in the allowable inputs for generating this clock.Allowable internal sources for generating the internal clock are:∙An internal relaxation oscillator∙Any of the X, Y, or Z gyros (MEMS oscillators with a variation of ±1% over temperature)Selection of the source for generating the internal synchronous clock depends on the requirements for power consumption and clock accuracy. These requirements will most likely vary by mode of operation.There are also start-up conditions to consider. When the MPU-6881 first starts up, the device uses its internal clock until programmed to operate from another source. This allows the user, for example, to wait for the MEMS oscillators to stabilize before they are selected as the clock source.4.11 Sensor Data RegistersThe sensor data registers contain the latest gyro, accelerometer, auxiliary sensor, and temperature measurement data. They are read-only registers, and are accessed via the serial interface. Data from these registers may be read anytime.4.12 FIFOThe MPU-6881 contains a 4096-byte FIFO register that is accessible via the Serial Interface. The FIFO configuration register determines which data is written into the FIFO. Possible choices include gyro data, accelerometer data, temperature readings, auxiliary sensor readings, and SYNC input. A FIFO counter keeps track of how many bytes of valid data are contained in the FIFO. The FIFO register supports burst reads. The interrupt function may be used to determine when new data is available.For further information regarding the FIFO, please refer to the MPU-6881 Register Map and Register Descriptions document.4.13 InterruptsInterrupt functionality is configured via the Interrupt Configuration register. Items that are configurable include the INT pin configuration, the interrupt latching and clearing method, and triggers for the interrupt. Items that can trigger an interrupt are (1) Clock generator locked to new reference oscillator (used when switching clock sources); (2) new data is available to be read (from the FIFO and Data registers); (3) accelerometer event interrupts; and (4) the MPU-6881 did not receive an acknowledge from an auxiliary sensor on the secondary I2C bus. The interrupt status can be read from the Interrupt Status register.For further information regarding interrupts, please refer to the MPU-6881 Register Map and Register Descriptions document.4.14 Digital-Output Temperature SensorAn on-chip temperature sensor and ADC are used to measure the MPU-6881 die temperature. The readings from the ADC can be read from the FIFO or the Sensor Data registers.4.15 Bias and LDOsThe bias and LDO section generates the internal supply and the reference voltages and currents required by the MPU-6881. Its two inputs are an unregulated VDD and a VDDIO logic reference supply voltage. The LDO output is bypassed by a capacitor at PLLFILT. For further details on the capacitor, please refer to the Bill of Materials for External Components.4.16 Charge PumpAn on-chip charge pump generates the high voltage required for the MEMS oscillators.4.17 Standard Power ModesThe following table lists the user-accessible power modes for MPU-6881.Table 12 Standard Power Modes for MPU-6881Notes:1. Power consumption for individual modes can be found in section 3.3.1.5 Programmable InterruptsThe MPU-6881 has a programmable interrupt system which can generate an interrupt signal on the INT pin. Status flags indicate the source of an interrupt. Interrupt sources may be enabled and disabled individually.Table 13 Table of Interrupt SourcesFor information regarding the interrupt enable/disable registers and flag registers, please refer to the MPU-6881 Register Map and Register Descriptions document. Some interrupt sources are explained below.6 Digital Interface6.1 I2C and SPI Serial InterfacesThe internal registers and memory of the MPU-6881 can be accessed using either I2C at 400 kHz or SPI at 1MHz. SPI operates in four-wire mode.Table 14 Serial InterfaceNote:To prevent switching into I2C mode when using SPI, the I2C interface should be disabled by setting the I2C_IF_DIS configuration bit. Setting this bit should be performed immediately after waiting for the time specified by the “Start-Up Time for Reg ister Read/Write” in Section 6.3.For further information regarding the I2C_IF_DIS bit, please refer to the MPU-6881 Register Map and Register Descriptions document.6.2 I2C InterfaceI2C is a two-wire interface comprised of the signals serial data (SDA) and serial clock (SCL). In general, the lines are open-drain and bi-directional. In a generalized I2C interface implementation, attached devices can be a master or a slave. The master device puts the slave address on the bus, and the slave device with the matching address acknowledges the master.The MPU-6881 always operates as a slave device when communicating to the system processor, which thus acts as the master. SDA and SCL lines typically need pull-up resistors to VDD. The maximum bus speed is 400 kHz.The slave address of the MPU-6881 is b110100X which is 7 bits long. The LSB bit of the 7 bit address is determined by the logic level on pin AD0. This allows two MPU-6881s to be connected to the same I2C bus. When used in this configuration, the address of the one of the devices should be b1101000 (pin AD0 is logic low) and the address of the other should be b1101001 (pin AD0 is logic high).6.3 I2C Communications ProtocolSTART (S) and STOP (P) ConditionsCommunication on the I2C bus starts when the master puts the START condition (S) on the bus, which is defined as a HIGH-to-LOW transition of the SDA line while SCL line is HIGH (see figure below). The bus is considered to be busy until the master puts a STOP condition (P) on the bus, which is defined as a LOW to HIGH transition on the SDA line while SCL is HIGH (see figure below).Additionally, the bus remains busy if a repeated START (Sr) is generated instead of a STOP condition.SDASCLPSSTART condition STOP conditionFigure 8 START and STOP ConditionsData Format / AcknowledgeI2C data bytes are defined to be 8-bits long. There is no restriction to the number of bytes transmitted per data transfer. Each byte transferred must be followed by an acknowledge (ACK) signal. The clock for the acknowledge signal is generated by the master, while the receiver generates the actual acknowledge signal by pulling down SDA and holding it low during the HIGH portion of the acknowledge clock pulse.If a slave is busy and cannot transmit or receive another byte of data until some other task has been performed, it can hold SCL LOW, thus forcing the master into a wait state. Normal data transfer resumes when the slave is ready, and releases the clock line (refer to the following figure).DATA OUTPUT BYTRANSMITTER (SDA)DATA OUTPUT BYRECEIVER (SDA)SCL FROMMASTERSTARTacknowledgementconditionFigure 9 Acknowledge on the I2C BusCommunicationsAfter beginning communications with the START condition (S), the master sends a 7-bit slave addressfollowed by an 8thbit, the read/write bit. The read/write bit indicates whether the master is receiving data from or is writing to the slave device. Then, the master releases the SDA line and waits for the acknowledge signal (ACK) from the slave device. Each byte transferred must be followed by an acknowledge bit. To acknowledge, the slave device pulls the SDA line LOW and keeps it LOW for the high period of the SCL line. Data transmission is always terminated by the master with a STOP condition (P), thus freeing the communications line. However, the master can generate a repeated START condition (Sr), and address another slave without first generating a STOP condition (P). A LOW to HIGH transition on the SDA line while SCL is HIGH defines the stop condition. All SDA changes should take place when SCL is low, with the exception of start and stop conditions.SDASTART conditionSCLADDRESS R/W ACK DATAACK DATA ACKSTOP conditionSP1 – 789 1 – 789 1 – 789Figure 10 Complete I 2C Data TransferTo write the internal MPU-6881 registers, the master transmits the start condition (S), followed by the I 2Caddress and the write bit (0). At the 9thclock cycle (when the clock is high), the MPU-6881 acknowledges the transfer. Then the master puts the register address (RA) on the bus. After the MPU-6881 acknowledges the reception of the register address, the master puts the register data onto the bus. This is followed by the ACK signal, and data transfer may be concluded by the stop condition (P). To write multiple bytes after the last ACK signal, the master can continue outputting data rather than transmitting a stop signal. In this case, the MPU-6881 automatically increments the register address and loads the data to the appropriate register. The following figures show single and two-byte write sequences.Single-Byte Write SequenceBurst Write SequenceTo read the internal MPU-6881 registers, the master sends a start condition, followed by the I2C address and a write bit, and then the register address that is going to be read. Upon receiving the ACK signal from the MPU-6881, the master transmits a start signal followed by the slave address and read bit. As a result, the MPU-6881 sends an ACK signal and the data. The communication ends with a not acknowledge (NACK) signal and a stop bit from master. The NACK condition is defined such that the SDA line remains high at the 9th clock cycle. The following figures show single and two-byte read sequences.Single-Byte Read SequenceBurst Read Sequence6.4 I2C TermsTable 15 I2C Terms6.5 SPI InterfaceSPI is a 4-wire synchronous serial interface that uses two control lines and two data lines. The MPU-6881 always operates as a Slave device during standard Master-Slave SPI operation.With respect to the Master, the Serial Clock output (SCLK), the Serial Data Output (SDO) and the Serial Data Input (SDI) are shared among the Slave devices. Each SPI slave device requires its own Chip Select (CS) line from the master.CS goes low (active) at the start of transmission and goes back high (inactive) at the end. Only one CS line is active at a time, ensuring that only one slave is selected at any given time. The CS lines of the non-selected slave devices are held high, causing their SDO lines to remain in a high-impedance (high-z) state so that they do not interfere with any active devices.SPI Operational Features1. Data is delivered MSB first and LSB last2. Data is latched on the rising edge of SCLK3. Data should be transitioned on the falling edge of SCLK4. The maximum frequency of SCLK is 1MHz5. SPI read and write operations are completed in 16 or more clock cycles (two or more bytes). Thefirst byte contains the SPI Address, and the following byte(s) contain(s) the SPI data. The firstbit of the first byte contains the Read/Write bit and indicates the Read (1) or Write (0) operation.The following 7 bits contain the Register Address. In cases of multiple-byte Read/Writes, data istwo or more bytes:6. Supports Single or Burst Read/Writes.。
SPECIFICATIONSFX-L Form Factor SST-SX700-LPT700W Switching Power SupplyWith Active PFC 80Plus Platinum011.1 ScopeThis specification defines the performance characteristics of a single phase 700 watts, 5 output power supply. This specification also defines worldwide safety and electromagnetic compatibility requirements for the power supply which is intended for use in computer products.Nominal Voltage 100-240 VrmsVoltage Variation Range90 - 264 Vrms1. General2.1 Input Voltage2.2 Input Frequency* The power supply must operate at above frequency with 90-264 VACrms input voltage range.2. Input CharacteristicsNominal Frequency50-60 HzFrequency Variation Range47 Hz to 63 Hz022.3 Max. Input AC Current3.1 Normal Operation Output 3. Output characteristicsMax. Input Current2.4 Inrush CurrentThe power supply must meet inrush requirements for any rated AC voltage, during turn on at any phase of AC voltage, during a single cycle AC dropout condition, during repetitive ON/OFF cycling of AC, and over the specified temperature range. The peak inrush current shall be less than the ratings of its critical components (including input fuse, bulk rectifiers, and surge limiting device).2.5 EfficiencySX700-LPT provides an efficiency of 90% at20% load, 92% at50% load, 89% at100% load under115V/60Hz and 230V/50Hz condition.Maximum continuous total DC output power should not exceed 700W.Maximum continuous combined load on +3.3VDC and +5VDC outputs shall not exceed 120W. Maximum combined load on 12V outputs shall not exceed 700W.NOTE:Noise test should be measured with 20 MHz bandwidth frequency oscilloscope. The output terminal shall add a tantalum capacitor of 10uF in parallel with a ceramic capacitor of 0.1uF.3.2 Remote On/Off Controlled modeThe PSON# signal is required to remotely turn on/off the power supply, PSON# is an active low signal that turns on the output power rails. When this is not pulled low by the system, or left open, the outputs (except the +5VSB) turn off. This signal is pulled to a standby voltage by a pull-up resistor internal to the power supply. TTL level "H" 2.0 V – 5.25 V"L" 0.0 V – 1.0 V10.0AMeasuring Range 90 - 264 Vrms3.3 RegulationThe cross regulation defined as follows, the output regulation should be within the specified range.3.4 Rise TimeDC output rise time is less than 20 mS at nominal line and full load.3.5 Hold-up TimeDC +5V output maintains at least 16mS is full 1oad after power off which hold within para 3.1 under 115V/60Hz and 230V/50Hz condition.3.6 5VSB5VSB is requierd for the implementation of PS-ON described above. 5VSB is a standby voltage that may be used to power circuits that require power input during the powered-down state of all power rails. The5 VSB pin should deliver 5V ±5% at a minimum of 3A for PC board circuits to operate. Conversely, PCboard should draw no more than 3A maximum form this pin. This power may be used to operate circuits such as soft power control.3.7 PG-OKPG-OK is a power good signal and should be asserted high by power supply to indicate that the +5 VDC and +3.3 VDC outputs are above the under-voltage thresholds of the power supply. When this signal is asserted high, there should be sufficient mains energy stored by the converter to guarantee continuous power operation within specification. Conversely, when either the +5VDC or the +3.3VDC output voltage falls below the under-voltage threshold, or when mains power has been removed for a time sufficiently long so that power supply operation is no longer guaranteed, PG-OK should be deasserted to a low state.See Figure 1 for a representation of the timing characteristics of the PG-OK,PS-ON, and germane power rail signals.3.8 3.3V SenseA default 3.3V sense line should be implemented pin 13 of the connector.3.9 Capacitive LoadThe power supply should be able to power up and operate normally with the following capacitances simultaneously present on the DC outputs.0304In primary circuit of the power supply , a protected fuse is inserted. Only internal fault of the power supply will cause the fuse blown. Any overload or short circuit at DC output will keep from fuse brown or fire hazard.4.1 Input ProtectionThe +5V/+12V/+3.3V DC output are protected against the under voltage condition . range value can't be exceed 3.3~3.7V at 5V terminal and 8.5~9.5V at 12V, 2.0~2.4V at 3.3V.4.2 Output Protection4.2.1 Under voltage protectionThe +12V/ DC output are protected against the over voltage condition . Maximum value can't be over 15.5V at 12V.4.2.2 Over Voltage ProtectionThe power supply can be used electronic circuit to limit the output current against exceeding 10%-60% of surge output power or protected against excessive power delivery since short circuit of any output or over total power at high line.4.2.3 Over Power Protection4. Protection5.1 No Load Start5. Start StabilityShort circuit placed on +5V,+12V,+3.3V,-12V will latch off. +5VSB will auto-recovery.4.2.4 Short Circuit ProtectionThis power supply includes an over-temperature protection sensor, which can trip and shut down the power supply at 1104.2.6 Over-Temperature ProtectionCurrent protection should be designed to limit the current to operate within safe operating conditions. Over current protection schemes where only the voltage output that experiences the over current event is shut off may be adequate to maintain safe operation of the power supply and the system; however, damage to the motherboard or other system components may occur. The recommended over current protection scheme is for the power supply to latch into the shutdown state. The setting of over current protection for each output rail is as following.When power is applied to SX700-LPT with no load connected or under minimum load connected, neither damage to power supply nor hazards to users will occur.5.2 Cold StartThe power supply shall operate properly when first applied at normal input voltage and or so maximum load after 4 hours storage in 0 environment.4.2.5 Over-Current Protection6.1 Temperature and Humidity6. Environments6.1.1 OperatingTemperature 0 to 40C Relative Humidity 20 to 90 %o056.2 AltitudeThe power supply can operate normally at any altitude between 0 to 10000 feet.6.3 Vibration and ShockSweep and resonance search for each of X,Y,Z, axis at the sweep.RATE of 1/OCTAVE/Min.CE,FCC7. Conducted EMITUV CB TUV-cus8.1 Safety RequirementThe AC leakage current is less than 3.5mA when the power supply connect to 253Vac/50Hz .8.2 Leakage CurrentThe insulation resistance should be not less than 30M ohm after applying of 500VDC for 1 minute.8.3 Insulation ResistanceThe power supply shall withstand for 1 minute without breakdown the application of a 60Hz 1500V AC voltage applied between both input line and chassis (20mA DC cut-off current). Main transformer shall similarly withstand 3000Vac applied between both primary and secondary windings for a minimum of one minute.8.4 Dielectric Voltage Withstand8. Product SafetyA TTL compatible signal for the purpose of initiating an orderly start-up procedure under normal input operating conditions. During power up, this signal is asserted ( low ) until +5V is under regulation and AC reaches min. line specification range. After all voltage are going appropriate level, the system may have a turn on delay of 100mS, but nogreater than 500mS. During power off the signal should go to low level before +5V is out of regulation. The low level is 0 to 0.8V and high level is 4.75 to 5.25V. The " Power Good "signal can drive up to 6 standard TTL loads.9. Power Good Signal6.1.2 StorageTemperature -40 to 70CRelative Humidity 20 to 95 % noncondensingoTime Diagram Figure 1 * T1 : Turn on time ( 2 sec. Max.)* T2 : Rise time ( 20mS Max.)* T3 : Power good turn on delay time ( 100 < T3 < 500 mS )* T4 : Switch on time (0.5 sec. Max.)* T5 : Power good turn off delay time ( 1.0 mS Min.) PS-ON/OFF* T6 : Power hold-up time (16 mS Min.)* Power on-off cycle :When the power supply is turned off for a minimum of 2.0 sec. and turn on again, the power good signal will be asserted.10. MTBFThe MTBF of the power should be 100,000 hours min.11. Burn-In11.1 Input VoltageApplying 230Vac11.2 Test ConditionApplying 80% loads for the power supply in 40 (+/-5) oC chamber for 4 hours.12. HarmonicsThe product shall meet requirement for EN61000-3-2 & EN61000-3-3 :2003 standard of class D, test at 230Vac 50Hz.13. Power FactorThe power supply with active power factor correction, and meet the EN61000-3-2 standards, The power factor is greater than 0.95 at 230V/50Hz, Max. load.14. Mechanical Specification125 mm (W) × 63.5 mm (H) × 130mm (D)06。
此清单是供美国实验室认可协会(A2LA)评估协会使用,并且不被公开发布。
这个文件的仅限于美国实验室认可协会员工,承包商,以及申请人和认可的实验室使用。
禁止其他本文件的使用。
以下页面是美国FDA现行的cGMP要求同21CFR210&211部分用于评估实验室目前使用的标准。
该实验室的政策和程序必须满足这些要求。
要求包括需要画阴影的书面政策,程序或协议。
实验室操作指南:尽管不是必需的,实验室完成这个检查清单。
正确完成本清单可节省大量的评估时间和成本。
完成清单的第二列的所有阴影要求的文件参考标识符(标有“参考”)。
适当的“参考”必须确定的文件(质量手册,实验手册,标准操作程序等)和包括以方便鉴定的有关文件的适当部分(页码,节数,等等)的“定位”。
质量体系文件和所支持的记录必须用于评估者的审查。
评估操作指南:审核实验室的文件化质量体系,以验证规定的遵守情况。
本标准包括药品,容器和密封元件的生产,以及测试要求。
因此,部分标准可能并不适用于所有评估。
不适用要求的地方,密切审查检查列表和安排NA。
评估确认确实实施所述质量体系文件。
将是,不是或者不适用填入每个清单项目空格。
在提供的空格上记录任何有关要求的评估。
在不同的表和/或方法审查列表,记录有关测试的评估。
必须确定所有偏差,并在偏差评估报告中解释。
评估实验室的技术能力,以执行特定的测试或特定类型的测试。
必须确定所有缺陷,并在评估缺乏报告解释。
评估实验室的工艺技能,以执行特定的考核或特定类型的考核。
实验室名称:--城市:————,国家:——-据我所知,所有以下实验室文件及实际的实验室常规已被评定为遵守现行良好制造规范(21 CFR第210-211)的有关条文。
美国实验室认可协会评估者签名:日期:要求参考仅评审保留遵守点评Y N NA4. 管理要求4.1 机构没有附加的要求4.2 质量体系4.2.1 应当有一个质量控制单元(QCU)批准或拒绝所有成分,药品容器,密封元件,中间体,包装材料,标签,和药品,并有权审核生产记录,以确保没有发生错误,或者如果出现了错误,他们已经得到了完整的调查。
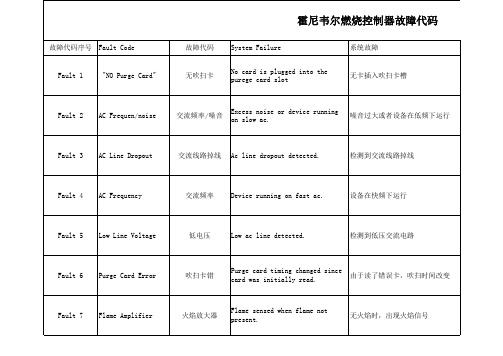
AC Cycle Dropout
1 测试目的
验证当AC掉电时,对POWER 的影响(很短时间的掉电) .An AC line dropout is defined as a drop in AC line voltage to 0V AC at any phase of the AC line for any length of time. An AC line dropout shall not cause any tripping of control signals or protection circuits. If the AC line dropout lasts longer than the specified maximum duration the power supply should recover and meet all turn on requirements. The power supply shall meet the regulation requirement over all rated AC voltages, frequencies, and defined dropout loading conditions for the outputs
2 工作原理(测试原理)
由于有PFC电感,BUCK电容,输出电感,电容,等一系列的储能组件的存在,所以当AC 掉电很短时间机台还能正常输出!
3 实验所需要之仪器
示波器, 十倍探头, 差分探头,电子负载, AC电源.
4 测试方法
4.1 仪器所需要之模式
示波器采样模式采用Sample model.
AC source 用Program model, 设置好Dropout time
DC Load 用CC model
4.2 带载情况
这项测试的的带载按照客户要求带载,(客户没要求旧带100%LOAD)
4.3 环境温度
25℃
4.4 测试步骤
1)将所需之探棒插入示波器,调零.将探棒接在示波器1V/1KHz信号校验端校验,看探头是否输出标准方波,补偿是否正常.
2)将归零的探棒夹到相应的测试点上, 差分探头量程大无极性直接接在AC
输出端,十倍探头接DC输出端.
3)调示波器合适的采样速度,放大倍数,
4) 调节AC SOURCE 设置号所需的掉电时间!
5 所涉及的计算公式
无
6 判定的标准
DC output 电压是否在规格范围之内,
PG 是否是HIGH的水平
7典型波形
PS-6241-08HP-ROHS 数据
以上仅为初定,如果有更好的提议,请随时修改.。