19讲:周转轮系的传动比计算
- 格式:ppt
- 大小:354.50 KB
- 文档页数:7
工 业 技 术93科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 1 相对运动速度的表示方法(1)先借鉴构件A相对于构件B做平移运动。
A和B的绝对速度分别是A V 和B V ,则A 相对于B的相对运动速度AB V =A V -BV 如果A V 和B V 互相平行,那么上述的矢量式可写成等效的代数式:V AB =V A -V B 在应用这个公式时不能简单地把VA和VB理解为一定是正数,而要理解为:VA等同于矢量A V ,VB等同于矢量B V 。
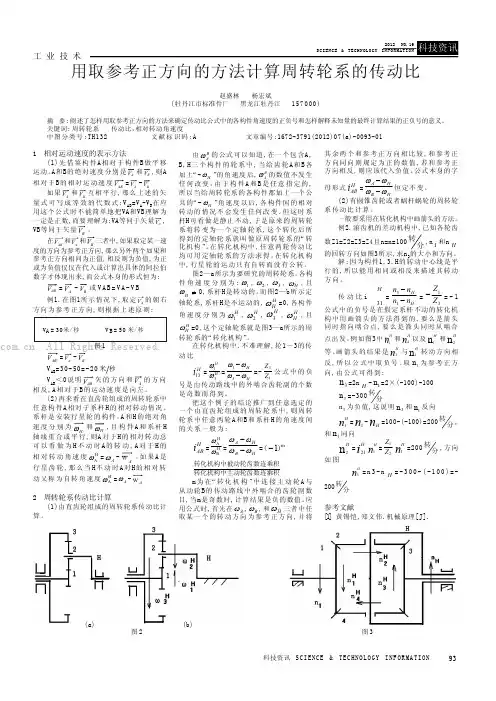
在AB V 和A V 和B V 三者中,如果取定某一速度的方向为参考正方向,那么另外两个如果和参考正方向相同为正值,相反则为负值,为正或为负值仅仅在代入或计算出具体的阿拉伯数字才体现出来,而公式本身的形式恒为:AB V =A V -B V 或V A B =V A -V B例1.在图1所示情况下,取定A V 的朝右方向为参考正方向,则根据上述原则:图1AB V =A V -BV V AB =30-50=-20秒米V AB <0说明AB V 矢的方向和A V 的方向相反,A 相对于B的运动速度是向左。
(2)再来看在直齿轮组成的周转轮系中任意构件A相对于系杆H 的相对转动情况。
系杆是安装行星轮的构件。
A 和H 的绝对角速度分别为H 和H ,且构件A 和系杆H 轴线重合或平行,则A 对于H 的相对转动总可以看做为H 不动时A 的转动,A 对于H 的相对转动角速度HA =A -A w 。
如果A 是行星齿轮,那么当H不动时A对H的相对转动又称为自转角速度HA =A -Aw 2 周转轮系传动比计算(1)由直齿轮组成的周转轮系传动比计算。
由BA的公式可以知道,在一个包含A,B,H三个构件的轮系中,当给齿轮A和B 各加上“-H ”的角速度后,BA 的数值不发生任何改变。
由于构件A 和B 是任意指定的,所以当给周转轮系的各构件都加上一个公共的“-H ”角速度以后,各构件间的相对转动的情况不会发生任何改变。
周转轮系的传动比计算周转轮系是一种用于传输运动和力的机械装置,常用于车辆和工程机械等设备中。
传动比是周转轮系中的重要参数,用于描述输入轮与输出轮的转速比和力的大小,决定了输出轮的转速和扭矩。
计算周转轮系的传动比需要确定输入轮和输出轮的直径。
假设输入轮的直径为D1,输出轮的直径为D2,其对应的转速分别为N1和N2、则周转轮系的传动比可以由下面的公式计算得到:传动比=N2/N1=D1/D2其中,传动比表示输出轮相对于输入轮的转速增益。
如果传动比大于1,输出轮的转速将大于输入轮的转速;如果传动比小于1,输出轮的转速将小于输入轮的转速;如果传动比等于1,输出轮的转速与输入轮的转速相等。
在实际应用中,周转轮系的传动比可以通过以下几种方式计算和确定。
1.机械传动计算法:根据输入轮和输出轮的直径来计算传动比。
这种方法适用于已知直径和转速的情况,但需要知道输入轮和输出轮的几何参数。
2.编码器计算法:通过安装编码器在输入轮和输出轮上,实时测量转速,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装编码器和进行实时测量。
3.转速传感器计算法:通过安装转速传感器在输入轮和输出轮上,测量转速并传输给计算设备,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装转速传感器和进行实时测量。
4.模拟计算法:根据输入轮和输出轮的转速曲线来进行传动比的估算。
这种方法能够通过分析转速曲线得到传动比的趋势,但需要输入轮和输出轮的转速曲线数据。
总之,传动比是周转轮系中的重要参数,能够描述输入轮和输出轮之间的转速和扭矩关系。
计算传动比需要确定输入轮和输出轮的直径,并可以通过机械传动计算法、编码器计算法、转速传感器计算法或模拟计算法来进行。
通过计算传动比可以优化周转轮系的设计和使用,满足具体设备的要求。
《机械原理》第九章齿轮系及其设计——周转轮系传动比的计算2H 2H 1313反转原理:给整个周转轮系加上“-ωH ”,不改变轮系中各构件之间的相对运动,但原周转轮系将转化成为一定轴轮系,可按定轴轮系的公式计算转化后轮系的传动比。
转化后所得轮系称为原周转轮系的2K-H 型“转化轮系”-ωH1 ω1将轮系按-ωH 反转后,各构件的角速度的变化如下:2 ω23 ω3H ωH转化后: 系杆=>机架,周转轮系=>定轴轮系构件原角速度转化后的角速度2H 13ω1H =ω1-ωHω2H =ω2-ωH ω3H =ω3-ωHωH H =ωH -ωH =02H 13上式“-”说明在转化轮系中ω1H 与ω3H 方向相反。
H H H i3113ωω=2132z z z z -=13z z -=H Hωωωω--=312H 132H 131133i ωω=周转轮系中1、3之间的传动比2132z z z z -=H Hωωωω--=31H H H i3113ωω=13z z -=通用表达式:Hn Hm ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=1. 齿轮m 、n 和H 的轴线必须平行。
2.公式中的“±” 不能去掉,它不仅表明转化轮系中两个太阳轮m 、n 之间的转向关系,而且影响到ωm 、ωn 、ωH 的计算结果。
特别注意:通用表达式:Hn H m ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=特别注意:3. ωm 、ωn 、ωH 的已知值代入上式时必须带正负号,当假定其中某一已知值的转向为正时,则转向与之相同的取正,与之相反的取负。
4.i mn H ≠i mn ,i mn H 为转化轮系中m 、n 两轮的角速度之比,其大小和方向按定轴轮系传动比的计算来确定;i mn 为周转轮系中m 、n 两轮的绝对速度之比,其大小和方向按其转化轮系的公式推导出来。

传动比公式是:传动比=主动轮转速除以从动轮转速的值=其分度圆直径比值的倒数。
具体含义如下:
1. 在机械传动系统中,其始端主动轮与末端从动轮的角速度或转速的比值,被称为传动比。
2. 传动比(i)=主动轮转速(n1)与从动轮转速(n2)的比值=齿轮分度圆直径的反比=从动齿轮齿数(Z2)与主动齿轮齿数(Z1)的比值。
即i=n1/n2=D2/D1 i=n1/n2=z2/z1。
3. 对于多级齿轮传动,每两轴之间的传动比按照上面的公式计算。
从第一轴到第n轴的总传动比等于各级传动比之积。
4. 传动比是机构中两转动构件角速度的比值,也称速比。
构件a和构件b的传动比为i=ωa/ωb=na/nb,式中ωa和ωb分别为构件a和b的角速度(弧度/秒);na和nb分别为构件a和b的转速(转/分)。
当式中的角速度为瞬时值时,则求得的传动比为瞬时传动比。
当式中的角速度为平均值时,则求得的传动比为平均传动比。
理论上对于大多数渐开线齿廓正确的齿轮传动,瞬时传动比是不变的;对于链传动和摩擦轮传动,瞬时传动比是变化的。
对于啮合传动,传动比可用a和b轮的齿数Za和Zb表示,i=Zb/Za;对于摩擦传动,传动比可用a和b轮的直径Da和Db表示,i=Db/Da。
希望以上信息对您有所帮助,如果您还有其他问题,欢迎告诉我。
轮系的分类传动比及相关计算讲解轮系是车辆传动系统的重要组成部分,用于将发动机的动力传递给车轮以推动车辆行驶。
轮系可以根据不同的参数进行分类,传动比是轮系中的一个重要参数,而相关计算则可以用于设计和优化轮系。
1.按照传动方式分类:前驱轮系:是指发动机的动力通过传动轴传递给前轮驱动的轮系,常见于前置发动机的前驱车辆。
后驱轮系:是指发动机的动力通过传动轴传递给后轮驱动的轮系,常见于后置发动机的后驱车辆。
四驱轮系:是指发动机的动力通过传动轴同时传递给前轮和后轮驱动的轮系,常见于越野车和高性能跑车。
2.按照结构形式分类:直接驱动轮系:是指发动机的动力直接传递给车轮的轮系,其传动方式相对简单,但传动比较大,常见于低速载重车辆。
间接驱动轮系:是指发动机的动力通过变速器、传动轴等部件传递给车轮的轮系,可以灵活调整传动比以适应不同的驾驶需求。
传动比:传动比是轮系中的一个重要参数,用于描述发动机输出转速和车轮转速之间的比值。
传动比的大小决定了车辆的加速性能、终速以及燃油经济性等。
传动比=车轮转速/发动机转速传动比的计算:传动比的计算可以根据不同的传动方式和结构形式进行。
1.直接驱动轮系的传动比计算:由于直接驱动轮系没有其他传动部件,传动比等于1,即车轮转速等于发动机转速。
2.间接驱动轮系的传动比计算:传动比等于变速器的传动比乘以传动轴的传动比。
传动比计算实例:假设辆车的变速器传动比为2.5,传动轴传动比为3.2,发动机转速为3000转/分钟,求车轮转速。
传动比=2.5*3.2=8相关计算:在轮系设计和优化中,常常需要进行一些相关计算,以满足特定的性能要求。
1.功率计算:根据发动机的输出功率和传动效率,可以计算出轮系的输出功率。
输出功率=发动机输出功率*传动效率2.扭矩计算:根据发动机的输出扭矩和传动效率,可以计算出轮系的输出扭矩。
输出扭矩=发动机输出扭矩*传动效率3.速度计算:根据车轮转速和轮系的传动比,可以计算出车辆的行驶速度。
《机械原理》第九章齿轮系及其设计——周转轮系传动比的计算2H 2H 1313反转原理:给整个周转轮系加上“-ωH ”,不改变轮系中各构件之间的相对运动,但原周转轮系将转化成为一定轴轮系,可按定轴轮系的公式计算转化后轮系的传动比。
转化后所得轮系称为原周转轮系的2K-H 型“转化轮系”-ωH1 ω1将轮系按-ωH 反转后,各构件的角速度的变化如下:2 ω23 ω3H ωH转化后: 系杆=>机架,周转轮系=>定轴轮系构件原角速度转化后的角速度2H 13ω1H =ω1-ωHω2H =ω2-ωH ω3H =ω3-ωHωH H =ωH -ωH =02H 13上式“-”说明在转化轮系中ω1H 与ω3H 方向相反。
H H H i3113ωω=2132z z z z -=13z z -=H Hωωωω--=312H 132H 131133i ωω=周转轮系中1、3之间的传动比2132z z z z -=H Hωωωω--=31H H H i3113ωω=13z z -=通用表达式:Hn Hm ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=1. 齿轮m 、n 和H 的轴线必须平行。
2.公式中的“±” 不能去掉,它不仅表明转化轮系中两个太阳轮m 、n 之间的转向关系,而且影响到ωm 、ωn 、ωH 的计算结果。
特别注意:通用表达式:Hn H m ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=特别注意:3. ωm 、ωn 、ωH 的已知值代入上式时必须带正负号,当假定其中某一已知值的转向为正时,则转向与之相同的取正,与之相反的取负。
4.i mn H ≠i mn ,i mn H 为转化轮系中m 、n 两轮的角速度之比,其大小和方向按定轴轮系传动比的计算来确定;i mn 为周转轮系中m 、n 两轮的绝对速度之比,其大小和方向按其转化轮系的公式推导出来。
周转轮系传动比新解法迭加法[摘要]《机械原理》教材中周转轮系的传动比计算,是学生学习过程中的难点之一。
周转轮系传动比的求解有多种方法,其中的反转法比较常见。
笔者经过探究,总结出一种新的解题法迭加法。
利用迭加法解题,使解法更加简便、直观,容易理解。
[关键词]周转轮系反转法迭加法牵引运动系杆轮系机构除用于各种传动外,还可用于运动和动力的分解和合成上,特别是周转轮系和复合轮系可实现小尺寸大功率大传动比传动。
通过对轮系的进一步研究,利用行星轮输出运动和动力,轮系的功能会更多。
高效并充分地分析机构特性是学好轮机工程机械的的前提。
机械工程专业学生在学习《机械原理》这一课程时,对定轴轮系传动比的计算容易把握,但对周转轮系传动比的计算却很难理解。
周转轮系传动比的计算方法,国内的各类教材中,全都是采用旋转法来求解,即由相对运动原理,对周转轮系加上一个附加的公共转动后,周转轮系各构件间的相对运动并不改变。
笔者经过教学过程的探究,理解到另外一种解法迭加法。
下面就对这两种解法原理及解题步骤作详细探讨。
一、周转轮系的组成组成周转轮系的主要构件有:(一)行星轮在轮系中,轴线位置绕固定轴线的转动的齿轮,称为行星轮。
因为它既要自转又要公转,似行星运转,故由此得名。
(二)转臂支持行星轮作自转和公转的构件称为转臂或行星架。
(三)中心轮轴线位置固定的齿轮称为中心轮或太阳轮。
应当注意,构成单个周转轮系,中心轮的数目不超过两个,转臂只有一个,且转臂与两中心轮的几何线必须重合,否则周转轮系不能转动。
二、周转轮系传动比的计算(一)计算原理由于周转轮系中行星轮的运动既有自转又有公转,所以其传动比不能直接采用求解定轴轮系传动比的方法来计算。
为了解决周转轮系的传动比计算问题,应设法将其转化成定轴轮系(即设法使转臂变为固定不变),再采用定轴轮系的传动比计算公式进行计算。
由相对运动原理可知,对周转轮系加一个附加的公共转动后,周转轮系构件间的相对运动并不改变。
周转轮系传动比的计算
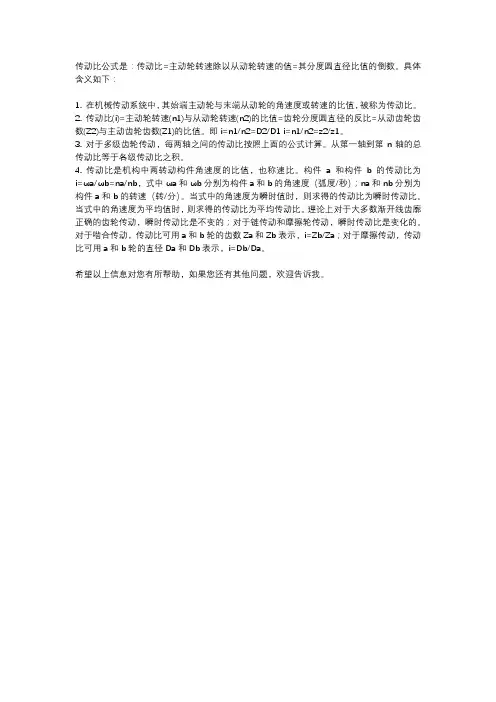
周转轮系及其传动比计算
1.周转轮系的组成
周转轮系由中心轮(太阳轮)、行星轮和系杆三种基本构件所组成。
其中,轴线位置固定的齿轮是中心轮,轴线位置变动的齿轮为行星轮,而系杆则是支持行星轮自转并带动其作公转的构件,通常用字母H 来表示。
判断一个轮系是定轴轮系还是周转轮系,只要看轮系中是否存在有行星轮。
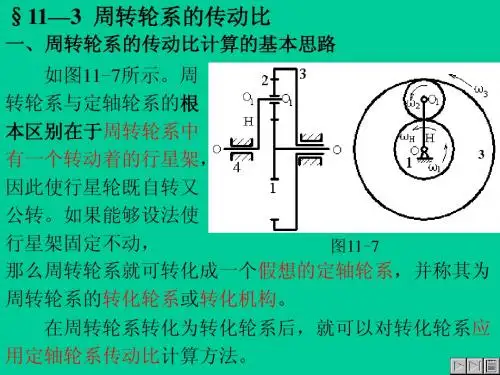
2.周转轮系的传动比
由于含有行星轮,周转轮系的传动比不能直接用定轴轮系传动比的计算方法来解决,而是利用相对运动原理引入转化轮系,即把周转轮系转化成一个假想的定轴轮系。
具体方法是利用转化轮系的传动比计算式,导出周转轮系各构件绝对转速之间关系式,从而计算它们之间的传动比:
H
K H H K H k n n n n n n i --==111 (1)在应用上述关系时,应注意以下几点:
(1)公式中的齿轮1和齿轮K 的轴线必须与转臂轴线平行,且转化轮系传动比计算公式不仅适用于两个中心轮之间,也可用于中心轮和行星轮之间。
但是,绝对不能把计算公式用于轴线不相平行的两个齿轮之间。
(2)在转化轮系传动比计算公式中,各个转速的前面必须有正、负号。
在假定某一转速为正之后,与之转向相同者亦为正,转向相反者则为负。
然后,把各转速的数值连同它们的符号一起代入公式进行计算。
(3)转化机构的传动比i ,应按照相应的定轴轮系传动比的计算方法求出。