电子地图管理系统
- 格式:docx
- 大小:19.23 KB
- 文档页数:39
基于二维/三维电子地图的标准地址查询、管理系统
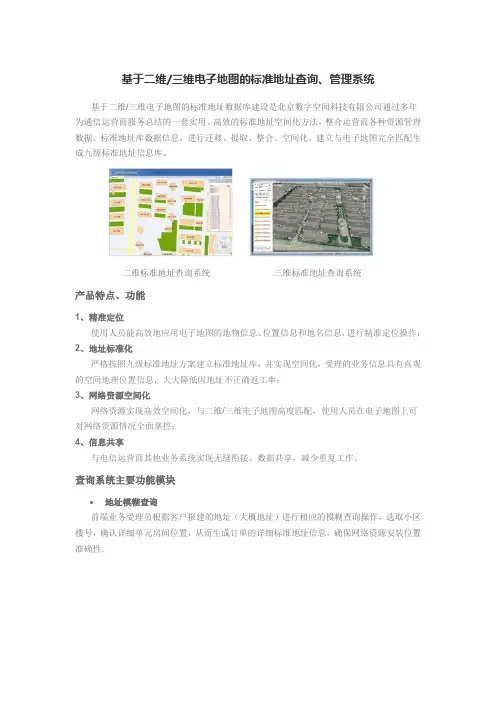
基于二维/三维电子地图的标准地址数据库建设是北京数字空间科技有限公司通过多年为通信运营商服务总结的一套实用、高效的标准地址空间化方法,整合运营商各种资源管理数据、标准地址库数据信息,进行迁移、提取、整合、空间化、建立与电子地图完全匹配生成九级标准地址信息库。
二维标准地址查询系统三维标准地址查询系统
产品特点、功能
1、精准定位
使用人员能高效地应用电子地图的地物信息、位置信息和地名信息,进行精准定位操作;
2、地址标准化
严格按照九级标准地址方案建立标准地址库,并实现空间化,受理的业务信息具有直观的空间地理位置信息,大大降低因地址不正确返工率;
3、网络资源空间化
网络资源实现高效空间化,与二维/三维电子地图高度匹配,使用人员在电子地图上可对网络资源情况全面掌控;
4、信息共享
与电信运营商其他业务系统实现无缝衔接、数据共享,减少重复工作。
查询系统主要功能模块
地址模糊查询
前端业务受理员根据客户报建的地址(大概地址)进行相应的模糊查询操作,选取小区楼号,确认详细单元房间位置,从而生成订单的详细标准地址信息,确保网络资源安装位置准确性。
∙已办理业务查询
点击建筑物,就能显示客户已经办理的相关业务,从而方便与客户沟通,同时可以生成详细标准地址,用以生成订单。
∙资源配置查询
搜索相应位置区,查询该位置区的资源配置,通过该查询可以准确快速为订单生成提供依据。
同时,也可以为后续施工提供最有利的现场依据,从而使业务办理快速高效,节省项目施工成本。
#include <cstdio>#include <cstdlib>#include <>#include <cstring>#include <ctime>#include <string>#include <algorithm>#include <iostream>using namespace std;void start();void display();void displaypaixu();void displayjiansuo();Road *head = NULL;void SearchByClass(Road *head){time_t a,b;Road *prev,*p,*end,*temp_head;char Run_time[80];int i=0,Class;printf("请输入您所要查找的道路的番号:\n");scanf("%d",&Class);prev=p=(Road *)malloc(sizeof(Road));n",b-a);}void SearchById(Road *head){time_t a,b;Road *prev,*p,*end,*temp_head;char Run_time[80];int i=0,LinkId;printf("请输入您所要查找的道路的ID:\n");scanf("%d",&LinkId);prev=p=(Road *)malloc(sizeof(Road));n",b-a);}void SearchByName(Road *head){time_t a,b;Road *prev,*p,*end,*temp_head;char Run_time[80];int i=0;char Name[30];printf("请输入您所要查找的道路的名称:\n");scanf("%s",Name);prev=p=(Road *)malloc(sizeof(Road));n",b-a);}void updata(Road*head){FILE*pp;FILE*ppp;FILE*infile;FILE*outfile;time_t a;char filename[20];Road*p1;Road*p2;pp=fopen("","w");if(pp==NULL){printf("文件创建失败\n");exit(1);}.\n");printf("文件更新成功\n");fclose(ppp);n",b-a);}Road* readfile(void){FILE *fp;unsigned short temp_data_size[1]; ...."); time(&begin);head = BubbleSort( head );time(&end);i=end-begin;....");time(&begin);head=SelectSort( head );time(&end);i=end-begin;....");time(&begin);QListSort( &head ,NULL);time(&end);i=end-begin;. |\n");printf(" | |\n");printf(" | ");for(i=0; i<63; i++){printf(">");//此处用time函数来暂停秒以描述程序的加载过程start=clock();finish=clock();while((finish-start)<30)finish=clock();}printf(" ");printf("|\n");printf(" | Load successfully! |\n");printf(" | |\n");printf(" | |\n");printf("--------------------------------------------------------------------------\n");printf("\n 按任意键将进入系统 (Press any key to enter thesystem) \n ");printf("\n ");SetConsoleTextAttribute(GetStdHandle(STD_OUTPUT_HANDLE),FOREGROUND_RED);system("pause");}void display(){printf("----------------------请按照菜单提示输入您的选择-------------\n");printf(" \n");printf(" <1>【读取文件】\n");printf(" <2> 【排序】 \n");printf(" <3> 【检索】 \n");printf(" <4> 【更新】 \n");printf(" <0> 【退出】 \n");}void displayjiansuo(){printf(" ----------------------请按照菜单提示输入您的选择-------------\n");printf(" \n"); printf(" <1>【指定LinkID检索】\n");printf(" <2>【指定交叉link列表示class番号检索】\n");printf(" <3>【指定查找岔路数检索】 \n");printf(" <4>【指定道路名称检索】 \n");printf(" <0>【返回】 \n");}void displaypaixu(){printf("----------------------请按照菜单提示输入您的选择-------------\n"); printf(" \n"); printf(" <1>【冒泡排序】 \n");printf(" <2>【选择排序】 \n");printf(" <3>【快速排序】 \n");printf(" <0>【返回菜单】 \n");}。
CBTC系统电子地图升级管控方案研究陈 超(常州地铁集团有限公司,江苏常州 213000)摘要:列车集成控制技术发展以及轨道交通线网规模的逐渐扩大,线路基础设施改造、线路分段开通和线网之间互联互通需求越来越多,对电子地图的升级管控模式提出更高的要求。
分析现行CBTC 系统电子地图在数据准备、更新方式存在的不足,提出新的CBTC 系统电子地图升级的管控方案,以提高电子地图数据的可维护性、可靠性以及安全性。
关键词:电子地图;基于通信列车控制系统;移动授权;可维护性;可靠性;安全性中图分类号:U284.48 文献标志码:A 文章编号:1673-4440(2022)12-0089-04Research on Control and Management Scheme ofUpgrading CBTC System Electronic MapChen Chao(Changzhou Metro Group Co., Ltd., Changzhou 213000, China)Abstract: With the development of train integrated control technology and the gradual expansion of rail transit network, more and more demands have been put forward for the refurbishment of line infrastructure, the sectional commissioning of lines and the interconnection between line networks, which puts forward higher requirements for the control and management mode of upgrading electronic map. This paper analyzes the shortages in the way of data preparation and updating of the current Communication Based Train Control (CBTC) system electronic map and puts forward a new control and management scheme of upgrading electronic map to achieve higher maintainability, reliability and safety of electronic map data.Keywords: electronic map; CBTC; MA; maintainability; reliability; safetyDOI: 10.3969/j.issn.1673-4440.2022.12.018收稿日期:2022-09-13;修回日期:2022-12-05作者简介:陈超(1987—),男,工程师,本科,主要研究方向:城市轨道交通信号系统,邮箱:****************。
电子地图电子地图系统是指在计算机软硬件的支持下,以地图数据库为基础,能够进行空间信息的采集、存储、管理、分析和显示的计算机系统。
电子地图系统由硬件、软件、数据和人员等部分组成。
这里着重介绍电子地图的软件组成与主要功能。
软件系统包括操作系统、地图数据库管理软件、专业软件以及其他应用软件。
在电子网络地图系统中地图数据库管理软件是它的核心,它具有构建,管理,检索查询,数据更新等功能:地图构建功能:允许用户根据设计方案选择内容、比例尺、地图投影、地图符号、颜色等,生产预想的地图,以满足需要。
从发展的角度来看,电子地图将成为新的地图制图平台,“地图制图平民化”的趋势也将越来越明显。
地图管理功能:除包含空间数据、属性数据和时间数据外,电子地图还包含多种数据源的数据,因此需要使用地图数据库管理这些复杂、大量的数据。
检索查询功能:可以根据用户需求来检索信息,并以多媒体的形式显示查询结果,包括图形到属性的查询,属性到图形的查询,图形、属性综合查询以及拓扑查询。
数据更新功能:能提供强有力的数据输入、编辑能力,以确保即时地更新数据,保证电子地图的现势性,并为再版地图创造优越的制图环境。
电子地图的图种较多,应用也非常广泛.现在我们来了解一下电子地图家族里的导航图,多媒体地图,网络地图的特点及行业应用.1.导航图现代交通发展以后,出现了复杂的公路体系。
这种公路错综复杂、四通八达,而周围景象往往千篇一律,不容易辨识。
地图是开车行路的必备工具,因此电子导航地图应运而生。
一张CD一ROM能装下全国的所有大大小小的道路数据,开车时携带便携式计算机,就能随时查阅地图。
不过这种电子地图并不像用一张光盘替代一本地图集这么简单,它还有更多的功能,如路径选择:出发前想去哪里,先告诉电子地图,它会帮助选择出一条最快捷的路线。
不一定必须知道目的地在地图上何处,只要有个地址电子地图用地理编码技术就能够自动找目标到并精确定位。
还有详细的资料库能辅助决定旅行计划,如它会告知旅途中会路过哪些名胜景点。
监控系统的电子地图一、介绍随着科技的飞速发展,监控系统在各个领域得到了广泛应用。
其中,电子地图作为监控系统的重要组成部分,在实现实时监控、定位和预警方面发挥着关键的作用。
本文将介绍监控系统中电子地图的定义、功能和应用。
二、电子地图的定义电子地图是基于地理信息系统(GIS)技术和网络通信技术开发而成的一种数字化地图,能够在计算机上实时显示出地理位置信息,并支持对监控设备的远程控制和管理。
其主要特点包括地理数据可视化、位置信息追踪和实时数据更新。
三、电子地图的功能1. 地理数据可视化:电子地图通过将地理数据转化为可视化的图形,能够直观地显示出监控系统所涉及的地理位置信息。
用户可以通过电子地图快速查看特定区域的监控设备分布情况。
2. 位置信息追踪:监控系统通过与设备终端进行连接,能够实时获取设备的位置信息,并在电子地图上进行追踪显示。
用户可以准确了解设备的当前位置,及时做出响应。
3. 实时数据更新:电子地图与监控系统实时相连,能够接收到监控设备的实时数据,并在地图上进行动态更新。
用户可以通过电子地图获知设备的状态和运行情况。
四、电子地图的应用1. 公共安全监控:电子地图结合监控系统,可广泛应用于公共安全领域。
例如,在城市监控中心,通过电子地图可以实时监视交通情况、公共场所的安全状况,并迅速响应突发事件。
2. 物流管理:电子地图可以为物流企业提供实时的车辆追踪和配送路线规划。
通过监控系统的电子地图,企业可以准确掌握货物的当前位置和运输进度,优化调度和配送效率。
3. 建筑物管理:电子地图可以用于大型建筑物或物业管理。
通过监控摄像头与电子地图的结合,可以实现对建筑物各个区域的实时监控、访客管理和安全预警。
4.环境监测:电子地图可以与环境监测设备结合,用于对环境污染、气象变化等进行实时监测。
相关部门可以通过电子地图及时掌握各个监测点的数据,并采取相应措施。
五、总结随着监控技术的不断发展,电子地图在监控系统中的应用越来越广泛。
电子地图系统开发方案概述:电子地图系统是一种基于计算机和网络技术,用于展示、查询和管理地理信息的系统。
本文将介绍一个完整的电子地图系统开发方案,包括系统需求、技术选型、系统设计和开发进程。
一、系统需求分析1. 功能需求:- 地图展示:能够以图形化形式展示地图,并支持缩放、拖动等操作。
- 地址搜索:提供地址搜索功能,用户可以通过输入地址查询地图上的位置。
- 路线规划:根据用户的起始点和目的地,规划最佳行车路线,并提供导航指引。
- 地图标注:允许用户在地图上添加标记、标签等信息,方便用户增加个性化的地图数据。
- 数据管理:支持对地图数据进行管理,包括添加、编辑、删除等操作。
2. 性能需求:- 快速响应:系统需要能够在用户进行操作时,快速加载和展示地图数据。
- 稳定可靠:要求系统具备良好的稳定性和可靠性,确保系统能够长时间稳定运行。
二、技术选型1. 前端技术:- 前端界面:采用HTML、CSS和JavaScript技术,实现用户界面的设计和交互操作。
- 地图展示:选择合适的地图引擎,如Google Maps、百度地图等,用于地图的展示和操作。
- 地址搜索:使用地理编码和逆地理编码技术,结合第三方地图服务商的接口,实现地址搜索功能。
- 路线规划:选择合适的路线规划算法,结合第三方地图服务商的接口,实现路线规划和导航功能。
- 交互设计:设计用户友好的界面,并采用响应式设计,使得系统能够在不同终端上展示和操作。
2. 后端技术:- 数据库:选择合适的数据库系统,如MySQL、MongoDB等,用于存储地图数据和用户操作记录。
- 服务器:使用Java、Python等编程语言,结合Spring、Django等开源框架,实现系统的后端逻辑和接口。
- 性能优化:通过缓存、负载均衡等技术手段,提高系统的性能和并发能力。
- 安全性:采用HTTPS协议、接口鉴权等安全措施,保护系统的数据和用户隐私。
三、系统设计1. 架构设计:- 前后端分离:将前端和后端进行解耦,实现前后端分离开发和部署。
基于电子地图的智能导航系统设计与优化导语:随着科技的不断进步和发展,智能导航系统进一步渗透到我们生活的方方面面。
基于电子地图的智能导航系统成为目前最受欢迎和实用的导航方式之一。
本文将探讨基于电子地图的智能导航系统的设计与优化,旨在提供更准确、高效的导航服务。
第一部分:介绍智能导航系统智能导航系统是一种基于电子地图和先进算法的应用,能够根据用户需求提供最佳的导航路径和服务。
智能导航系统的核心是电子地图,通过将高精度的地理信息与实时交通数据相结合,帮助用户进行准确、高效的导航。
第二部分:智能导航系统的设计要素1. 电子地图数据:智能导航系统的设计需要依赖准确、完整的电子地图数据。
电子地图需要包含道路网络、POI(兴趣点)、交通流量等关键信息。
同时,电子地图数据的更新要及时,确保导航系统能够提供最新的地理信息。
2. 路径规划算法:路径规划算法是智能导航系统的核心,决定着系统的导航效果。
好的路径规划算法需要考虑实时交通状况、用户偏好等因素,能够在短时间内给出最佳的路径选择。
3. 用户体验设计:智能导航系统的设计要关注用户体验,包括界面设计、操作便捷性、语音提示等方面。
界面设计应简洁明了,易于操作;语音提示要清晰、准确,以方便司机或行人的使用。
第三部分:智能导航系统的优化方法1. 实时交通数据的应用:智能导航系统可以通过获取实时交通数据,实时分析路况,为用户提供实时的导航路径。
根据交通流量、拥堵情况调整导航路径,避免拥堵路段,提供更准确的导航指引。
2. 多源数据的融合:将多种数据源进行融合,可以提升智能导航系统的精确度和全面性。
除了电子地图数据和实时交通数据,还可以融合天气数据、偏好数据、用户历史数据等,使导航系统能够更加准确地理解用户需求。
3. 机器学习技术的应用:通过机器学习技术,可以对导航系统进行建模和优化。
利用大量的历史导航数据和用户反馈,建立预测模型,从而提供个性化的导航推荐。
第四部分:智能导航系统的未来发展趋势1. 人工智能和自动驾驶的融合:随着人工智能和自动驾驶技术的进步,智能导航系统将与自动驾驶技术相结合。

地图信息管理系统是一种基于地理信息技术的数据管理系统,用于存储、处理和分析地图数据以支持决策制定和资源管理。
它的应用范围十分广泛,涉及农业、林业、城市规划、交通运输、环境保护等众多领域。
本文将从以下几个方面阐述的概念、功能、应用以及未来的发展趋势。
一、的概念是一种综合管理系统,它融合了地理信息系统、数据库管理系统、可视化技术等多种技术手段,可以有效地实现地图数据的管理和应用。
通常包括数据输入、编辑、存储、查询、分析和输出等功能,可以进行不同层次、不同领域和不同尺度地图数据的管理和应用。
该系统可为用户提供准确、及时和全面的信息支持,提高决策的科学性和有效性。
二、的功能1.数据输入数据输入是的第一步,可通过多种手段实现,例如通过GPS定位、数字化等方式获取地图数据。
这些数据可以是地形、地貌、地下水井等天然地理要素,也可以是人文要素,如道路、建筑等。
数据的输入应遵循标准规范,以便后续处理和管理。
2.编辑地图数据输入后需要进行编辑,包括几何信息、属性信息、关系信息等。
几何信息是地物的形状和空间位置的描述,属性信息则是对地物的描述,如名称、用途、特征等。
关系信息则是不同地物之间的关系。
编辑需要按照一定的规则和标准进行,以确保数据的准确性和一致性。
3.存储编辑完成后,地图数据需要进行存储。
通常采用数据库技术进行存储,以保证数据的持久性、稳定性、安全性和可扩展性等。
通过数据库管理系统可以方便地对数据进行管理和维护,提高数据的利用效率。
4.查询地图数据需要进行查询,以便进行相应的分析和应用。
查询可以按照空间位置、属性信息等多种方式进行。
查询功能的有效性和可靠性对于的应用至关重要。
5.分析具备丰富的分析功能,可以对地图数据进行统计分析、空间分析等。
例如可以进行地图叠加、距离测量、面积计算、路径分析等,它们对于应用领域的要求不同,可以为用户提供合理的分析结果和决策支持。
6.输出可以将数据输出为各种格式,如图形、表格等,以满足不同用户的需求。
电子地图管理系统一、概述:随着电信网络的发达、计算机技术的不断更新,一个采用计算机网络、现代通讯技术、地理信息技术,支持大型数据库的信息平台GIS(地理信息系统)系统应运而生。
地理信息系统一般由地理信息开发平台、电子地图、信息数据库几部分组成。
由于电子地图具有直观、方便的特点,将其应用于决策支持系统能够表现出很大的优越性。
珠海市社会治安视频监控系统即采用高精度电子地图、Oracle大型数据库、计算机网络、现代通讯等技术为一体的具有针对性的综合管理GIS系统。
当按动报警点的报警按钮时,监控端面前的计算机屏幕的电子地图上立即显示出这个报警点的具体方位及事先输入的相关信息,监控端即可通知与此地最近的负责单位出勤,同时计算机自动记录该事件。
监控端通过计算机还可更详细地了解事件发生地周围的情况,及时更新调度,减少盲动。
如果该系统再配上GPS卫星监控系统,则可大大提高对突发事件的应变能力和事件处理效率。
二、设计采取的应用技术及其说明1.电子地图管理系统采用Autodesk公司的Mapguide建立;Autodesk MapGuide 通过Internet/Intranet发布智能设计图、地图及其它数据,从而帮助任何人,在任何地方,都可以获取实时的空间信息,并与之交互。
在Autodesk MapGuide中,用户可以选择对象、查询属性、寻找地物、标注图形、设置报表,这样一套应用系统远远优于纸图、缩微胶片或孤立的数据库,它提升了空间数据的价值。
Autodesk MapGuide可同时与多个关系、地理或设计数据库相连,接纳包括所有主要的空间数据格式,如AutoCAD DWG与Oracle8i Spatial,即可扩展又具安全性。
Autodesk MapGuide的特点在于高速、灵活、易用,从而脱颖而出,成为开发以Web为中心的CAD与GIS 应用系统首选的解决方案,它能够快速地推进决策,降低运营成本,提高客户服务质量。
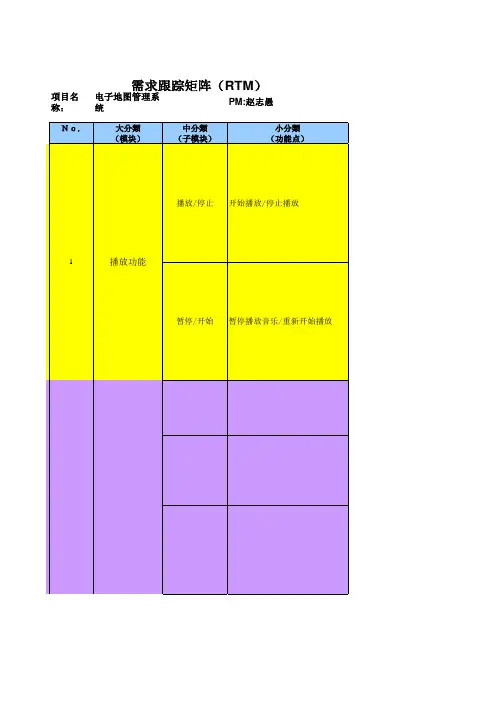
密级:秘密文档编号:D0000-PPC-项目编号-PRA-年份项目名称:电子地图管理系统项目编号:电子地图管理系统需求定义书第1版哈尔滨学院软件学院总页数正文附录无生效日期编制:审批:修改履历编号修改内容修改人修改日期是否评审评审日期123目录1认识电子地图 01.1整体 01.2 读取文件 (1)1.3排序 (2)1.4检索 (3)1.5更新 (5)1.6退出 (6)1认识电子地图1.1整体本项目的系统界面设计如图2-1图2-11. 界面显示为本项目的主画面,其中最上方为项目的名称和创建时间以及创建者等相关项目的信息,如同Windows项目的帮助一样。
用户整体读取文件检索更新退出排序2. 以顺序号的形式列出了本系统的所有的功能,其中有读取文件、排序、检索、更新、退出等功能。
1.2 读取文件当“请选取”项目输入数字1的时候,如果文件读取成功将会有消息提示,然后重复显示服务的种类。
如下图2-2。
图2-2这功能要注意的是:1、如果源文件不存在要有提示,或者手动输入文件的路径。
加载文件成功以后一定要返回到所有服务种类的工具项目界面。
2、对生成的文件的输出位置要有明确的说明,以作为其它功能的应用源文件。
3、对以前的操作记录以保留的形式滚动地进行保留。
1.3排序排序功能是对已加载成功的二进制文件排序。
这里可以进行多种排序,并用对每种排序加以记时(这部分功能图略),对所有排序的结果与预测的进行比较,如下图2-3。
图2-3排序的结果输出在指定的二进制文件的位置。
并回到所有功能界面。
1.4检索当功能界面中“请选择”输入3的时候进入检索功能,这个功能是在已进行排序的基础上进行的,详见下图2-4。
图2-4这部分列出了不同的检索方式,这些方式都是二进制文件中地图格式的一部分。
对于每一种检索方式可以用不同的查找方法,也可对同一个检索方式进行不同的查找方法进行比较。
对于选择某一种方式后还要输入检索的关键字如下图2-5所示。
#i n c l u d e<c s t d i o> #include <cstdlib>#include <malloc.h>#include <cstring>Road *head = NULL;void SearchByClass(Road *head){time_t a,b;Road *prev,*p,*end,*temp_head;char Run_time[80];int i=0,Class;printf("请输入您所要查找的道路的番号:\n");exit(5);}while(temp_head!=NULL){if(temp_head->stRoadRec.linkid==Class){end=(Road *)malloc(sizeof(Road));printf("#linkid=%d ",temp_head->stRoadRec.LinkID);printf("roadnameflag=%d ",temp_head->stRoadRec.roadnameflag);printf("brunch=%d ",temp_head->stRoadRec.brunch);i++;}temp_head=temp_head->next;}end->next=NULL;p ->next = NULL;if(i>=5){save(prev);}{Road *prev,*p,*end,*temp_head;char Run_time[80];int i=0,LinkId;printf("请输入您所要查找的道路的ID:\n");scanf("%d",&LinkId);prev=p=(Road *)malloc(sizeof(Road));//创建一个结点a=time(NULL);strftime(Run_time,79,"%H:%M:%S",localtime(&a));end=(Road *)malloc(sizeof(Road));printf("#linkid=%d",temp_head->stRoadRec.LinkID);printf("roadnameflag=%d",temp_head->stRoadRec.roadnameflag);printf("brunch=%d",temp_head->stRoadRec.brunch);printf("dispclass=%d",temp_head->stRoadRec.linkid);printf("roadname=%s#\n",temp_head->stRoadRec.roadname);p->stRoadRec.LinkID=temp_head->stRoadRec.LinkID;p->stRoadRec.roadnameflag=temp_head->stRoadRec.roadnameflag;if(i>=5){save(prev);printf("查询结果数大于5,已保存至SearchResult.txt\n");}b=time(NULL);strftime(Run_time,79,"%H:%M:%S",localtime(&b));printf("本次查找用时%d 秒.\n",b-a);}{scanf("%s",Name);prev=p=(Road *)malloc(sizeof(Road));//创建一个结点a=time(NULL);strftime(Run_time,79,"%H:%M:%S",localtime(&a));temp_head = head;if(temp_head == NULL){printf("无数据源");printf("dispclass=%d",temp_head->stRoadRec.linkid);printf("roadname=%s#\n",temp_head->stRoadRec.roadname);p->stRoadRec.LinkID = temp_head->stRoadRec.LinkID;p->stRoadRec.roadnameflag = temp_head->stRoadRec.roadnameflag;p->stRoadRec.brunch = temp_head->stRoadRec.brunch;p->stRoadRec.linkid = temp_head->stRoadRec.linkid;p->stRoadRec.roadname = temp_head->stRoadRec.roadname;p->next=end;}b=time(NULL);strftime(Run_time,79,"%H:%M:%S",localtime(&b));printf("本次查找用时%d 秒.\n",b-a);}void updata(Road*head){FILE*pp;{printf("文件创建失败\n");exit(1);}//判断文件是否创建成功//p1=head;if(p1==NULL){printf("空指针\n");a=time(NULL);strcpy(filename,"update.dat");infile=fopen("jilu.txt","w");fscanf(infile,"%d%s",&a,&filename);//将时间和update.dat都写入文件中//outfile=fopen("jilu.txt","r");if(outfile==NULL)exit(1);fprintf(outfile,"%s",filename);//将文件中的内容读出来作为文件名////}printf("文件更新中...\n");printf("文件更新成功\n");fclose(ppp);//文件更新完毕,将排序后的内容写入文本文件和二进制文件中//}void SearchByBruch(Road *head) {time_t a,b;temp_head = head;if(temp_head == NULL){printf("无数据源");system("pause");exit(4);}while(temp_head!=NULL)p->stRoadRec.LinkID=temp_head->stRoadRec.LinkID;p->stRoadRec.roadnameflag=temp_head->stRoadRec.roadnameflag;p->stRoadRec.brunch=temp_head->stRoadRec.brunch;p->stRoadRec.linkid=temp_head->stRoadRec.linkid;p->stRoadRec.roadname = temp_head->stRoadRec.roadname;p->next = end;p = p->next;i++;}b=time(NULL);strftime(Run_time,79,"%H:%M:%S",localtime(&b));printf("本次查找用时%d 秒.\n",b-a);}Road* readfile(void){FILE *fp;fp = fopen("GTBL.dat","rb+");if(fp == NULL){printf("错误:不能打开 GTBL.dat\n");system("pause");looperror:printf("\n请输入你要打开的文件名\n");scanf("%s",temp_name);printf("读取成功\n");}while(1){pEnd = (Road *)malloc(sizeof(Road));fread( temp_data_size,sizeof(unsigned short),1,fp );pCur->stRoadRec.data_size = M_CHG_INT16(temp_data_size[0]);//printf("%d",pCur->stRoadRec.data_size);fread( temp_LinkID,sizeof(unsigned int),1,fp ););pCur->stRoadRec.roadnameflag = ( (0x80 & temp_info[0])>>7 );if(pCur->stRoadRec.roadnameflag == 1){pCur->stRoadRec.roadname=(char*)malloc(pCur->stRoadRec.data_size-12);//pri ntf("%d",pCur->stRoadRec.data_size-12);p_name = (char*)malloc(pCur->stRoadRec.data_size-12);fread(pCur->stRoadRec.roadname,(pCur->stRoadRec.data_size-12),1,fp);//pCur->stRoadRec.roadname = p_name;}pCur=pCur->next;}pCur->next=NULL;return head;}void QListSort(Road **head, Road *end){Road *right;right_walk = &right;left_count = right_count = 0;//取第一个节点作为比较的基准,小于基准的在左面的子链表中, //大于基准的在右边的子链表中for (old = (*head)->next; old != end; old = old->next){if (old->stRoadRec.LinkID < pivot->stRoadRec.LinkID) //小于基准,加入到左面的子链表,继续比较{*right_walk = old;right_walk = &(old->next);}}//合并链表*right_walk = end; //结束右链表*left_walk = pivot; //把基准置于正确的位置上 pivot->next = right; //把链表合并QListSort(head, pivot);head = &(pivot->next);count = right_count;}}while (count > 1);}Road * BubbleSort(Road *head){for (endpt=NULL; endpt!=head; endpt=p) /*结合第6点理解*/ {for (p=p1=head; p1->next->next!=endpt; p1=p1->next) {if (p1->next->stRoadRec.LinkID> p1->next->next->stRoadRec.LinkID) /*如果前面的节点键值比后面节点的键值大,则交换*/{p2 = p1->next->next; /*结合第1点理解*/p1->next->next = p2->next; /*结合第2点理解*/free(p1); /*释放p1*/p1 = NULL; /*p1置为NULL,保证不产生“野指针”,即地址不确定的指针变量*/return head;}Road *SelectSort(Road *head){Road *first; /*排列后有序链的表头指针*/Road *tail; /*排列后有序链的表尾指针*/{if (p->next->stRoadRec.LinkID < min->stRoadRec.LinkID) /*找到一个比当前min小的节点。