三阶数字锁相环中的混沌与分岔
- 格式:doc
- 大小:572.00 KB
- 文档页数:11
实验7 非线性电路振荡周期的分岔与混沌实验长期以来人们在认识和描述运动时,大多只局限于线性动力学描述方法,即确定的运动必然有一个确定的解析解。
但是在自然界中相当多的情况下,非线性现象却有着非常大的作用。
1963年美国气象学家Lorenz 在分析天气预报模型时,首先发现空气动力学中的混沌现象,这一现象只能用非线性动力学来解释。
于是,1975年混沌作为一个新的科学名词首先出现在科学文献中。
从此,非线性动力学得到迅速发展,并成为有丰富内容的研究领域。
该学科涉及到非常广泛的科学范围,从电子学到物理学,从气象学到生态学,从数学到经济学等。
混沌通常相应于不规则或非周期性,这是非由非线性系统产生的本实验将引导学生自已建立一个非线性电路。
该电路包括有源非线性负阻, LC 振荡器和移相器三部分。
采用物理实验方法研究LC 振荡器产生的正弦波与经过RC 移相器移相的正弦波合成的相图(李萨如图),观测振动周期发生的分岔及混沌现象。
费根鲍姆常数是伴随着非线性科学的发展产生的一个新的常数.本文对费根鲍姆常数进行简单的介绍并利用非线性电路混沌实验来测量验证。
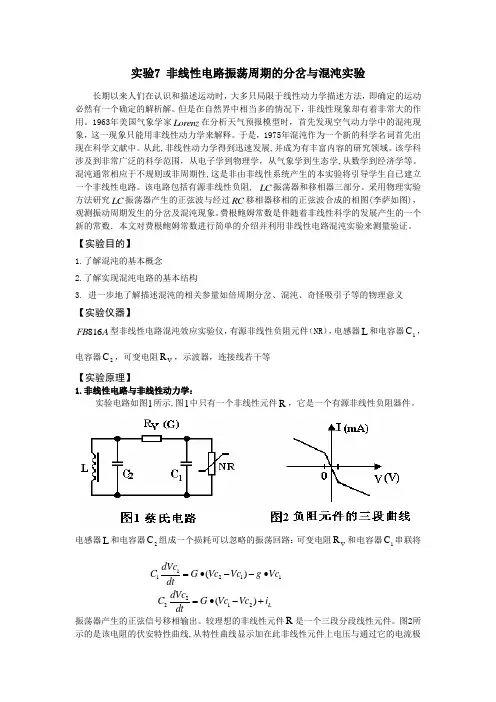
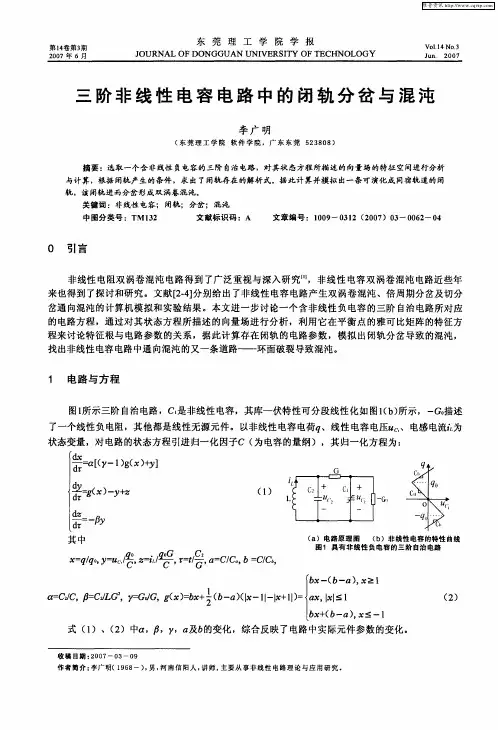
【实验目的】1.了解混沌的基本概念2.了解实现混沌电路的基本结构3. 进一步地了解描述混沌的相关参量如倍周期分岔、混沌、奇怪吸引子等的物理意义【实验仪器】816FB A 型非线性电路混沌效应实验仪,有源非线性负阻元件(NR ),电感器L 和电容器1C , 电容器2C ,可变电阻V R ,示波器,连接线若干等【实验原理】1.非线性电路与非线性动力学:实验电路如图1所示,图1中只有一个非线性元件R ,它是一个有源非线性负阻器件。
电感器L 和电容器2C 组成一个损耗可以忽略的振荡回路:可变电阻V R 和电容器1C 串联将振荡器产生的正弦信号移相输出。
较理想的非线性元件R 是一个三段分段线性元件。
图2所示的是该电阻的伏安特性曲线,从特性曲线显示加在此非线性元件上电压与通过它的电流极11211()dVc C G Vc Vc g Vc dt =∙--∙2212()LdVc C G Vc Vc i dt=∙-+性是相反的。

常微分方程的分岔和混沌现象在数学中,常微分方程是一种可以描述物理现象的数学模型。
它可以用来研究物体的位置、速度和加速度之间的关系,以及变化的趋势。
常微分方程的分岔和混沌现象是该领域中的一个重要的课题,本文将从这个角度来深入探讨。
一、什么是常微分方程的分岔?在物理现象中,往往有一些参数是可以改变的,比如弹簧的弹性系数,转动惯量等等。
在数学模型中,这些参数往往以某个常数的形式出现,我们称之为控制参数。
当控制参数发生微小变化时,数学模型的解也会发生微小的变化。
分岔就是指,当控制参数发生连续或突然的变化时,数学模型的解出现了明显的差别,显示出了不同的行为特征。
例如,当控制参数发生小变化时,物理现象可能在一个稳定的状态下来回振动,而当控制参数的值超过某个特定的临界点时,物理现象会出现混乱的不规则波动,这就是分岔现象。
二、什么是混沌现象?混沌现象是指,当物理现象受到微小的扰动时,它的运动过程变得高度不稳定和不可预测。
这种不可预测的现象表现为波动或震荡的不规则运动,这种不规则运动又称为混沌运动。
混沌现象在物理、化学、生物等多个领域中都有应用。
三、常微分方程的分岔与混沌现象之间的关系分岔是混沌现象的前提条件之一。
通过调整控制参数,一些数学模型可以表现出非常有规律但是复杂的行为。
随着控制参数的改变,它们会经历一系列的分岔,最终出现混沌现象。
例如,著名的洛伦兹系统,通过改变其参数,可以很容易地使方程产生分岔,最终出现混沌现象。
四、常微分方程的分岔和混沌现象的应用常微分方程的分岔和混沌现象在很多领域都有应用。
在物理领域中,这些现象可以用于描述流体、气体等的运动方式,从而帮助物理学家更好地理解它们的性质和行为。
在经济学中,常微分方程的分岔和混沌现象可以用来研究经济模型中的行为和趋势,以更好地预测和管理经济的发展。
在生物学中,常微分方程的分岔和混沌现象可以用于描述细胞生长和病毒传播的方式,为人们提供更好的治疗和预防方法。
锁相环(PLL)详解
锁相环(PLL)详解锁相环是指一种电路或者模块,它用于在通信的接收机中,其作用是对接收到的信号进行处理,并从其中提取某个时钟的相位信息。
或者说,对于接收到的信号,仿制一个时钟信号,使得这两个信号从某种角度来看是同步的(或者说,相干的)。
由于锁定情形下(即完成捕捉后),该仿制的时钟信号相对于接收到的信号中的时钟信号具有一定的相差,所以很形象地称其为锁相器。
而一般情形下,这种锁相环的三个组成部分和相应的运作机理是:
1 鉴相器:用于判断锁相器所输出的时钟信号和接收信号中的时钟的相差的幅度;
2 可调相/调频的时钟发生器器:用于根据鉴相器所输出的信号来适当的调节锁相器内部的时钟输出信号的频率或者相位,使得锁相器完成上述的固定相差功能;
3 环路滤波器:用于对鉴相器的输出信号进行滤波和平滑,大多数情形下是一个低通滤波器,用于滤除由于数据的变化和其他不稳定因素对整个模块的影响。
从上可以看出,大致有如下框图:
┌─────┐┌─────┐┌───────┐
→─┤鉴相器├─→─┤环路滤波器├─→─┤受控时钟发生器├→┬─→└──┬──┘└─────┘└───────┘│
↑↓
└──────────────────────────┘
可见,是一个负反馈环路结构,所以一般称为锁相环(PLL: Phase Locking Loop)。
锁相环有很多种类,可以是数字的也可以是模拟的也可以是混合的,可以用于恢复载波也可以用于恢复基带信号时钟。
数字三阶锁相环的工作原理
数字三阶锁相环是一种使用数字计算技术实现的锁相环系统。
其工作原理如下:
1. 输入信号相位检测:将待锁定的输入信号与参考信号进行比较,通过输入信号的正弦波与参考信号的正弦波之间的相位差来检测输入信号的相位。
2. 数字控制器:在数字控制器中,使用数字计算技术对输入信号相位进行数字化和处理。
它会根据输入信号的相位差来生成一个控制信号。
3. 控制信号输出:控制信号由数字控制器输出到频率控制器中。
频率控制器可以是数字频率合成器或数字控制的电压控制振荡器。
4. 频率控制:频率控制器会根据控制信号来调整输出信号的频率。
频率控制器可以通过改变输出信号的周期来实现频率调整。
5. 输出信号比较:输出信号与参考信号进行比较,并计算输出信号的相位差。
这个相位差将作为下一次循环的输入信号相位进行反馈。
6. 反馈控制:根据输出信号相位差,反馈控制校正输入信号的相位,从而实现输入信号与参考信号的相位同步。
通过不断调节输出信号的频率和相位,数字三阶锁相环可以实
现输入信号与参考信号的相位锁定。
这种锁相环系统适用于需要高精度相位同步的应用,如通信系统、测量仪器等。
092071201 李慧丽一类分支出十二个小振幅极限环的三次多项式系统刘一戎 黄文韬这是一篇刘一戎老师和黄文韬老师的论文,该文研究一类三次系统的小振幅极限环问题,用奇点量的的方法计算焦点量,得到了一类三次多项式系统在细焦点分支出12个小振幅极限环的结论。
奇点量的表达式是相对简单的,极限环存在性的证明过程是准确的符号运算。
下面是原文内容的译文。
1 引言在平面微分系统定性理论中,下列多项式系统的极限环分支问题是一个众所周知的困难问题这个问题属于Hilbert 第十六问题的第二部分。
最近的综述文章[1]给出了这个问题的最新进展。
令H(n)表示n 次多项式系统(1)的最大极限环个数,则文[3]证明了H(2)≥4。
文[7,9,37]给出了H(3)≥11。
最近,P.Yu 和韩冒安[10]利用正规型理论研究下列关于原点对称的三次多项式系统:其中22112030312140,,,,,,,2aa b a a a b b a b b b a a b+≠>==-=-=-= 2422212121222212(10101)(40329)2()10(221)a b b ba b b a b a b b b ba +---+=-+--。
发现了这个系统有12个小振幅极限环。
在这12个小振幅极限环中有6个由焦点(0,1)分支出,另外6个由其对称的焦点(0,-1)分支出。
这个结果是迄今为止关于三次多项式系统极限环分支的最好结果。
但我们也看到该文的关于系统(2)的第五个和第六个个焦点量太长,以至无法在正文中表出,而且在极限环存在性的证明中采用了数值近似计算。
我们设想能否将这两点改进?在本文中,我们研究了如下的三次多项式系统的极限环分支问题:这里δ,(1,2,3,4,5)i A i =为实常数。
这个系统关于原点对称,且有两个对称的焦点(1,0)和(-1,0)。
通过奇点量和焦点量的计算,我们用两种方法证明了该系统有12个小振幅极限环,其一的精确地构造了Poincar é后继函数,导出该系统有2m(m=1,2,…,6)个小振幅极限环的一般结论,存在12个极限环则为结论中的一种情形;其二是用文[45]的极限环存在的一个充分条件定理,构造出半径加速递减的极限环,从而得出结论。
图1. 初始条件X(0)= 0.8, R = 0.7 收敛到平衡点零
2.当0<X(0) < 1, 1 < R < 2时,仿真结果如图2
图2. 初始条件X(0)= 0.8, R = 1.6 收敛到平衡点,有稳态误差
图3. 初始条件X(0)= 0.8, R = 2.8 振荡收敛到平衡点,有稳态误差4.当0<X(0) < 1, 3 < R < 3.4495时,仿真结果如图4
图4. 初始条件X(0)= 0.8, R = 3.3 不稳定,周期为2振荡
5.当0 <X(0) < 1, 3.4495 < R < 3.5441时,仿真结果如图5
图5. 初始条件X(0)= 0.8, R = 3.498 不稳定,周期为4振荡6. 当0 < X(0) < 1, 3.5441 < R < 3.5644时,仿真结果如图6
图6. 初始条件X(0) = 0.8, R = 3.561 不稳定,周期为8振荡
7. 当0< X(0) < 1, R 大约为3.570时,仿真结果如图7
图7. 初始条件X(0)= 0.8, R = 3.570 不稳定,分叉,走向混沌状态
8. 当0< X(0) < 1, 2.5< R < 4时,系统由稳定、分叉、走向混沌的过程如图8
图8. 系统由稳定、分叉、走向混沌过程。
三阶数字锁相环中的混沌与分岔摘要:研究一个三阶零交叉数字锁相环(ZCDPLL)中的非线性动力性。
观测到,当一阶,二阶ZCDPLL表现为双周期性走向混沌,则三阶ZCDPLL在混沌之路中体现出一个解体的周期吸引子。
系统动力学的复杂性和可预见性也可通过使用非线性动力测度方法来刻画,比如说Lyapunov指数,Kaplan-York维数,关联维数和Kolmogorov熵。
所有结果表明,三阶ZCDPLL的混沌是低维的。
关键词:数字锁相环;分岔;混沌;动力测度1.简介一直以来,锁相环(PLLs)被用于构建电子通讯系统的模块。
由于系统的非线性特性,甚至到现在,其应用潜力【1,2】的调查研究和环路动力特性【3-6】,依然是众多研究者关注的议题。
最近,已经有相关文献【7-9】报道了一个模拟的三阶锁相环中的非线性动力特性,但是,同样的内容在三阶数字锁相环中仍在探索。
数字锁相环(DPLLs)是离散的非线性反馈控制系统并且广泛应用于同步通信系统【10】。
与模拟锁相环不同的是,数字锁相环在直流漂移方面上有超过模拟三阶锁相环的明显优点,如元件值的精密度,等。
广泛使用的数字锁相环是一个非一致的正向零交叉抽样数字锁相环,因为它更容易设计和实现。
一阶,二阶ZCDPLLs中的非线性动力性的研究已经在相关文献【11,12】报道过了,它表明了,依赖于控制参数,系统能够通过一串周期倍分岔走向混沌状态。
众所周知,三阶数字锁相环通常应用在要求具有快速瞬态响应的接收系统中。
然而,锁相环的阶数的增加使得系统动力性变得更加复杂,并且有时候还会变得难以分析。
因此,人们总有采用非线性动力学方法通过时间序列数据来研究高阶系统动力性动力。
而且,三阶数字锁相环的混沌动力学的特性对系统设计,混沌控制以及探索在实际通信系统中应用混沌的可行性来说非常重要。
在这篇文章中,我们研究的是三阶零交叉数字锁相环的非线性动力性。
系统的混沌现象借助于非线性动力测度来量化,即Lyapunov指数,Kaplan-York维数,关联维数和Kolmogorov熵。
据观察,三阶数字锁相环中的动力性与一阶和二阶的数字锁相环有很大的不同。
在三阶系统中,低阶环中随着设计参数变化的通常周期倍混沌路线是没有的。
同样的,三阶零交叉数字锁相环中的混沌现象是低维的并且很好刻画,这些对基于混沌的电子通讯系统中的混沌控制和混沌可行性开发都是必需的。
本文按如下分布。
下一节刻画所研究系统的结构,并公式化系统方程。
在第三节,系统的稳定性分析已经完成。
第四节介绍的是不同控制参数的数值分岔分析。
第五节介绍的是系统的扩展时间序列分析。
最后,第六节的内容是综合的结论性评论。
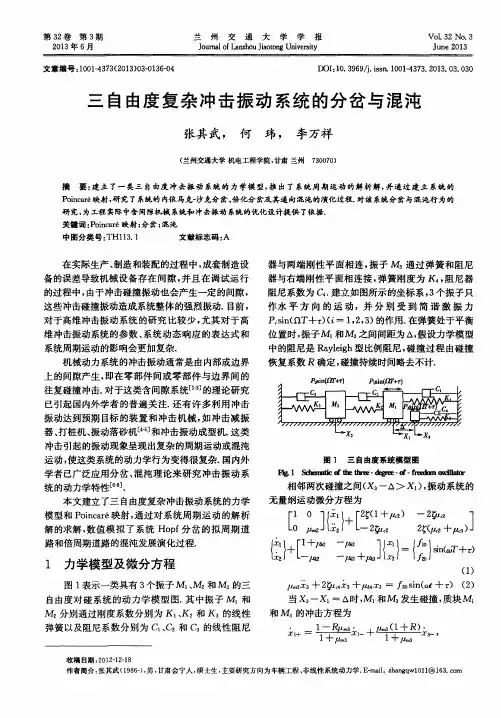
2.系统描述和系统方程公式图1.三阶ZCDPLL 的函数方图图1表示三阶ZCDPLL ,包括采样,二阶环路数字滤波器(LDF )和一个数字控制振荡器(DOC ),设噪音自由输入信号为:0()sin(())s t A t t ωθ=+ (1) 其中,00()()i t t θωωθ=-+,A ,i ω,0θ,分别代表振幅,角频率,相位常数。
0(2/)T ωπ=是周期为T 的DCO 的名义上的角频率。
()s t 被采样器在输入信号的每个正向转换边界处采样。
样本序列()(0,1,2..)k k x s t k ==由LDF 处理并且给过滤器输出k y 为123000k k mk k l l l m l y G x G x G x ====++∑∑∑ (2)其中123,,G G G 是环路数字滤波器的增益。
序列k y 是用于控制DCO 的下一个周期来完成操作上的同步状态,算法是【10】,10()k i t k kT y -=-∑。
现在输入信号相位和DCO 相位(,)k rad φ之间的相位误差定义为:100(())k k i t k y φθω-=-∑ (3)这样反过来给出了系统的相位控制方程为【10】:3212133sin()(1)sin()sin()k k k k k k k pK K r K φφφφφφφ+++++-+-=-++- (4)其中使用下列替换:012131,1,2,3;,1/,/i i g A G i K g z r g g p r g g ω====+=+。
z 是输入信号到DCO 信号的频率。
从系统设计的角度来看,,,K r p 是可以独立控制的并保持其它参数不变的设计参数。
K 被解释为回路增益参数,,r p 是环路数字滤波器参数。
下一节,我们将研究设计参数,,K r p 对环路动力性的影响。
3.稳定性分析系统方程(4)可以重新整理并编写为一个三维迭代映射方程1[,]k K X F X q +=,其中3X R ∈,q 是定义为()T q Krp =一组分岔参数集。
这些产生在如下方程组中: 1,k k x y +=1,k k y z +=133sin (1)sin sin .k k k k k k k z z y x pK z K r y K x +=-+-++- (5)这里我们设12,,,()T k k k k k k x y z X xyz φφφ++====。
形式(5)的系统的雅克比变换可以写成:010G 0011cos 3(1)cos 3cos K x K r y Kp z ⎛⎫ ⎪'= ⎪ ⎪--++-⎝⎭(6)在稳定状态下,选择*2(0,1,2..)X n n π==附近的稳定点去线性化方程(6)。
现在,根据Ostrowski 的理论,如果*()G X '的特征值,记为i ψ,满足条件1i ψ<,系统将会达到一个稳定的锁定状态。
以信号和系统参数的形式给出了系统的稳定条件【13】为: 20,p r +->(1)0,K p p r --+>8(2)0,K p r -++>40.p r -++> (7) 这些条件的设定能够帮助选择环路设计参数的合适值。
此外,系统参数的选择为1K =,2,3r p K K ==,将会导致系统的快速收敛。
因此,这些值的设定可以取为系统设计的最佳值。
4.数值分岔分析我们通过检测稳态相位误差来研究系统分岔现象,选取参数,,K r p 中的任意一个作为控制参数,使另外两个参数保持最优值。
首先,我们取p 作为控制参数并且不断改变它的值以保持1,2K r ==。
图2a 表示系统在4p =收敛于一个稳定的不动点,这与(7)的稳定条件相符。
当4p >时发生了周期倍分岔。
如果继续增加控制参数p 的值,当 4.7p =时会出现一个不相交的吸引子结论。
这种类型的吸引子不会出现在一阶,二阶ZCDPLL 。
p 的值增加时,吸引子相互靠近,直到p 到达一个确定值(=5.08),它们会一起消失。
放大后的不相交的吸引子区域(图2b )说明了周期性行为穿插在吸引子中(例 4.92p =时周期为-6).当 4.99p >时系统进入混沌状态。
不相交吸引子的存在可以通过采取了初始条件0x =,y z -平面的图中的来观察得更仔细。
它们在4.85p =时显示了一个近似椭圆的轨道,并且随着p 的增加而逐渐扭曲,最后一起消失(图3)。
在,K r 取其他值时,从本质上来说,动力性是相同的,只是在发生分岔的点不同。
在其他分岔参数中,取K 为控制参数,在 1.489K =(3,2p r ==)时稳态相位误差分岔。
之后,比如一阶,二阶ZCDPLLs ,系统动力沿着常见的周期倍轨道走向混沌(图4)。
然而,当 1.6K >时,一些随机状态随着混沌状态一起开始引起关注。
取r 为控制参数(1,3K p ==),直到3r =时系统仍然处于稳定状态(根据式(7))。
超过该值,一个周期轨道的快速堆积产生在通往混沌之路,这就是为什么周期一和混沌之间的区间不能准确数值跟踪,并且系统直接从周期一状态进入混沌状态(图4)。
下一节,将通过不同的动力测度来刻画混沌行为。
图2 (a )p 作为控制参数的分岔图(b )(a)的盒域的由底向上的视图(1,2K r ==)图3. 4.85p =和 5.08p =时的相空间中吸引子(1,2K r ==)图4. K 和r 作为控制参数的分岔图(3p =)5.时间序列分析我们通过利用系统方程(4)产生的相位误差中的时间序列数据来分析三阶ZCDPLL 的动力性。
这样得到的数据是用来推导标准动力测度,有Lyapunov 指数(LE ),Kaplan-York 维数,关联维数(2D )和Kolmogorov 熵(2K )。
系统的Lyapunov 指数给出了系统的时间演化和依赖初始条件的敏感程度。
来自系统变量的时间序列数据计算Lyapunov 指数的方法在文献【14】中有据可查。
这里我们利用有不同控制参数的相位误差的时间序列来计算三阶ZCDPLL 的Lyapunov 指数。
表1表示p 取不同值(1,2K r ==)的LE 值。
当LE 值为正时表示了混沌的产生。
接下来,我们开始通过下面的定义【15】来计算Kaplan-York 维数(KY D )的值:11jji KY j D j λλ=+=+-∑ (8)其中j λ是Lyapunov 指数,j 是满足条件10j j i λ=>∑的最大值。
在p 取不同值时的KYD 值列在表1中。
因为只有一个正的Lyapunov 指数,所以这个系统的混沌是低维的。
表1.对不同p 值的Lyapunov 指数(s λ')和Kaplan-York 维数(KY D )(1,2K r ==)吸引子的关联维数也是混沌的一个定量测度。
首先,我们得找出相关积分,定义为【16】:21/21112()[(())](1)N N m m i k j k i j i k C d H d x x N N ++==+==⨯--+∑∑∑ , (9) 其中N 是时间序列中数据点的个数,H 是海维塞德函数,m 是嵌入维数。
为了通过时间序列来重建初始相空间,定义向量i X 为:[(),(),...,((1))]i i i i R i R i R i X V t V t V t m ττ=++- (10) 这里τ是时间延迟,在这个系统中τ是系统的采样周期,即1.我们通过线性维数d 将空间分解成超立方体,并计算所有的相互距离小于d 的点。
在【16】中我们能找到利用Grassberger-Procaccia 算法算出的关联维数的详细过程。
在 5.11,1,2p K r ===时使系统进入混沌区间,不同嵌入维数(m )下的关联维数(2D )能够通过log ().log()m C d vs d 曲线的斜率(图5)计算出来(图5中盒状区间指出的标计区域的正确选择)。
图6是通过嵌入维数(m )来表示的2D 的图,通过这个图我们得到了系统的关联维数是2 1.1511D =。