计算机图形学-变换
- 格式:ppt
- 大小:985.50 KB
- 文档页数:51
3D游戏与计算机图形学中的数学⽅法-变换1变换在3D游戏的整个开发过程中,通常需要以某种⽅式对⼀系列的向量进⾏变换。
通常⽤到的变换包括平移,缩放和旋转。
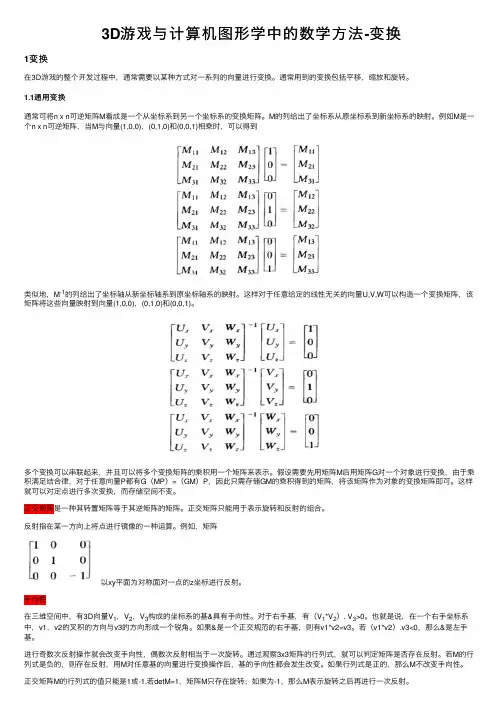
1.1通⽤变换通常可将n x n可逆矩阵M看成是⼀个从坐标系到另⼀个坐标系的变换矩阵。
M的列给出了坐标系从原坐标系到新坐标系的映射。
例如M是⼀个n x n可逆矩阵,当M与向量(1,0,0),(0,1,0)和(0,0,1)相乘时,可以得到类似地,M-1的列给出了坐标轴从新坐标轴系到原坐标轴系的映射。
这样对于任意给定的线性⽆关的向量U,V,W可以构造⼀个变换矩阵,该矩阵将这些向量映射到向量(1,0,0),(0,1,0)和(0,0,1)。
多个变换可以串联起来,并且可以将多个变换矩阵的乘积⽤⼀个矩阵来表⽰。
假设需要先⽤矩阵M后⽤矩阵G对⼀个对象进⾏变换,由于乘积满⾜结合律,对于任意向量P都有G(MP)=(GM)P,因此只需存储GM的乘积得到的矩阵,将该矩阵作为对象的变换矩阵即可。
这样就可以对定点进⾏多次变换,⽽存储空间不变。
正交矩阵是⼀种其转置矩阵等于其逆矩阵的矩阵。
正交矩阵只能⽤于表⽰旋转和反射的组合。
反射指在某⼀⽅向上将点进⾏镜像的⼀种运算。
例如,矩阵以xy平⾯为对称⾯对⼀点的z坐标进⾏反射。
⼿向性在三维空间中,有3D向量V1,V2,V3构成的坐标系的基&具有⼿向性。
对于右⼿基,有(V1*V2). V3>0。
也就是说,在⼀个右⼿坐标系中,v1,v2的叉积的⽅向与v3的⽅向形成⼀个锐⾓。
如果&是⼀个正交规范的右⼿基,则有v1*v2=v3。
若(v1*v2).v3<0,那么&是左⼿基。
进⾏奇数次反射操作就会改变⼿向性,偶数次反射相当于⼀次旋转。
通过观察3x3矩阵的⾏列式,就可以判定矩阵是否存在反射。
若M的⾏列式是负的,则存在反射,⽤M对任意基的向量进⾏变换操作后,基的⼿向性都会发⽣改变。
如果⾏列式是正的,那么M不改变⼿向性。

图形变换(转)主要内容:图形处理是CAD/CAM中的关键技术,包括图形⽣成、编辑和图形变换。
计算机图形学计算机图形学的概念计算机图形学的研究内容图形变换点的变换⼆维图形的变换⼆维图形的齐次变换⼆维图形的基本变换复合变换三维图形的齐次变换三维图形的基本变换复合变换1、什么是计算机图形学计算机图形学(Computer Graphics)是近30年来发展迅速、应⽤⼴泛的新兴学科,是计算机科学最活跃的分⽀之⼀。
计算机图形学是研究在计算机中如何表⽰图形,以及利⽤计算机进⾏图形的计算、处理和显⽰的相关原理与算法的⼀门学科。
随着计算机技术的发展,计算机图形学在CAD/CAM等计算机应⽤领域中占有越来越重要的地位。
计算机图形学的研究内容是⼗分丰富的。
虽然许多研究⼯作已经进⾏了多年,取得了不少成果,但随着计算机技术的进步和图形显⽰技术应⽤领域的扩⼤和深⼊,计算机图形学的研究、开发与应⽤还将得到进⼀步的发展。
2、图形变换的概念根据需要将已定义的图形从屏幕的某⼀位置移动到另⼀位置,或改变图形的⼤⼩和形状或利⽤已有的图形⽣成复杂的图形,这种图形处理的⽅法称为图形的⼏何变换,简称图形变换。
图形变换是计算机图形学的核⼼基础,通过图形变换,能够很⽅便地由简单图形派⽣出所需要的图形。
图形变换主要包括⼆维图形和三维图形的⼏何变换,投影变换等。
图形变换通常采⽤矩阵变换的⽅法,图形变换不同,其变换矩阵也不同,本节将重点介绍图形变换的矩阵⽅法及图形变换的程序设计。
2.1 点的变换在计算机绘图中,常常要进⾏诸如⽐例、对称、旋转、平移、投影等各种变换,图形可以⽤点集来表⽰,也就是点集定了,图形也就确定了。
如果点的位置变了,图形也就随之改变。
因此,要对图形进⾏变换,只要变换点就可以了。
由于点集可以⽤矩阵的⽅法来表达,因此对点的变换可以通过相应的矩阵运算来实现,即旧点(集)×变换矩阵矩阵运算新点(集)。
2.2 ⼆维图形变换⼆维图形变换主要包括⽐例,对称、错切、旋转、平移等。
图形变换基本概念图形变换是计算机图形学中的一个重要概念,它通过对图形进行特定操作来改变其形状、大小或位置。
图形变换常用于图像处理、动画制作和计算机图形学等领域,对于实现图像变换效果有着重要的作用。
本文将介绍几种常见的图形变换方法及其基本概念。
一、平移变换(Translation)平移变换是一种基本的图形变换方法,它将图形沿着指定的方向进行移动。
平移变换可以通过改变图形中所有点的坐标来实现。
设原始坐标为(x,y),平移变换后的坐标为(x',y'),则有如下公式:x' = x + dxy' = y + dy其中dx和dy分别是水平和垂直方向上的平移量。
通过改变dx和dy的值,可以实现图形的平移。
二、旋转变换(Rotation)旋转变换是将图形绕着指定点旋转一定角度的操作。
旋转变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),旋转变换后的坐标为(x',y'),则有如下公式:x' = x*cosθ - y*sinθy' = x*sinθ + y*cosθ其中θ表示旋转的角度。
通过改变θ的值,可以实现图形的旋转。
三、缩放变换(Scaling)缩放变换是将图形按比例进行放大或缩小的操作。
缩放变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),缩放变换后的坐标为(x',y'),则有如下公式:x' = x * sxy' = y * sy其中sx和sy分别表示在水平和垂直方向上的缩放比例。
通过改变sx和sy的值,可以实现图形的缩放。
四、错切变换(Shearing)错切变换是将图形在水平或垂直方向上斜向延伸的操作。
错切变换可以通过改变图形中每个点的坐标来实现。
设原始坐标为(x,y),错切变换后的坐标为(x',y'),则有如下公式:x' = x + myy' = nx + y其中n和m分别表示在水平和垂直方向上的错切系数。
第五章图形变换重点:掌握二维几何变换、二维观察变换、三维几何变换以及三维观察变换。
难点:理解常用的平移、比例、旋转变换,特别是复合变换。
课时安排:授课4学时。
图形变换包括二维几何变换,二维观察变换,三维几何变换和三维观察变换。
为了能使各种几何变换(平移、旋转、比例等)以相同的矩阵形式表示,从而统一使用矩阵乘法运算来实现变换的组合,现都采用齐次坐标系来表示各种变换。
齐次坐标系齐次坐标系:n维空间中的物体可用n+1维齐次坐标空间来表示。
例如二维空间直线ax+by+c=0,在齐次空间成为aX+bY+cW=0,以X、Y和W为三维变量,构成没有常数项的三维平面(因此得名齐次空间)。
点P(x、y)在齐次坐标系中用P(wx,wy,w)表示,其中W是不为零的比例系数。
所以从n维的通常空间到n+1维的齐次空间变换是一到多的变换,而其反变换是多到一的变换。
例如齐次空间点P(X、Y、W) 对应的笛卡尔坐标是x=X/W和y=Y/W。
将通常笛卡尔坐标用齐次坐标表示时,W的值取1。
采用齐次坐标系可以将平移、比例、旋转这三种基本变换都以相同的矩阵形式来表示,并统一地用矩阵乘法来实现变换的组合。
齐次坐标系在三维透视变换中有更重要的作用,它使非线形变换也能采用线形变换的矩阵表示形式。
5.1 二维几何变换二维几何变换就是在平面上对二维点的坐标进行变换,从而形成新的坐标。
二维几何变换主要包括:平移、比例、旋转、对称、错切、仿射和复合变换。
5.1.1 二维平移变换如图所示,它使图形移动位置。
新图p'的每一图元点是原图形p中每个图元点在x和y方向分别移动Tx和Ty产生,所以对应点之间的坐标值满足关系式x'=x+Txy'=y+Ty可利用矩阵形式表示成:[x' y']=[x y]+[Tx Ty]简记为:P'=P+T,T=[Tx Ty]是平移变换矩阵(行向量)。
从矩阵形式来看,平移变换是矩阵加法,而比例和旋转变换则是矩阵乘法。