转速、电流双闭环控制的直流调速系统动态分析汇总
- 格式:ppt
- 大小:340.00 KB
- 文档页数:2

转速、电流双闭环直流调速系统的动态过程分析主讲人:张敬南副教授主要内容01 双闭环直流调速系统动态结构图02 双闭环直流调速系统的起动过程03 动态抗扰性能分析04 转速调节器和电流调节器的作用(一)双闭环直流调速系统动态结构图双闭环直流调速系统的动态结构图U *n αU c -I dLnU d0 U n + - - β+- U iW ASR (s) W ACR (s) K sT s s +11/R T l s+1 R T m s U *i I d 1/C e+ E(1)起动过程分析U *n αU c -I dLn U d0 U n + - - β+ - U iW ASR (s) W ACR (s) KsT s s +11/R T l s+1 R T m s U *i I d 1/C e + E零初始状态突加给定电压(1)起动过程分析U *n αU c -I dLn U d0 U n + - - β+ - U iW ASR (s) W ACR (s) KsT s s +11/R T l s+1 R T m s U *i I d 1/C e + E转速的变化:结合运动方程; 电流的变化:结合电压方程。
(1)起动过程分析I dLI d nn * I dmO O I II IIIt 4 t 3 t 2 t 1 t t①第 I 阶段——电流上升阶段 2375()=-Td L C dnI I dt GD d d =--ds c e d I L K U C n I R t(1)起动过程分析I dLI d nn * I dmO O I II IIIt 4 t 3 t 2 t 1 t t②第 II 阶段——恒流升速阶段 2375()=-Td L C dnI I dt GD d d =--ds c e d I L K U C n I R t(1)起动过程分析②第 II 阶段——恒流升速阶段U *n α-I dLn U n + - W ASR (s) R T m s U *i 1/C e I d U c U d0 - β+ - U iW ACR (s)K sTs s +1 1/R T l s+1 + E(1)起动过程分析③第 III 阶段——转速调节阶段 I dLI d nn * I dmO O I II III t 4 t 3 t 2 t 1 t t.(2)起动过程特点 ①饱和非线性控制。
转速、电流双闭环调速系统的工程设计直流电动机在启动阶段,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器, 此时以最大电流给定值使电流调节器输出移相信号,直流电压迅速上升,电流也随即增大直到等于最大给定值,直流电动机以最大电流恒流加速启动。
电动机的最大电流(堵转电流)可以通过调整速度调节器输出限制的幅值来改变。
在电动机转速上升到给定转速后, 速度调节器输入端的偏差信号减小到近于零,速度调节器和电流调节器退出饱和状态,闭环调节开始起作用。
对于负载引起的转速波动,速度调节器输入端产生的偏差信号将随时通过速度调节器、电流调节器来修正触发器的移相电压,使整流桥输出的直流电压相应变化,从而校正和补偿电动机的转速偏差。
另外电流调节器的小时间常数, 还能够对因电网波动引起的电动机电枢电流的变化进行快速调节,可以在电动机转速还未来得及发生改变时,迅速调整电流恢复到原来值,从而使直流电动机更好地在稳定转速下运行。
转速调节器是调速系统的主导调节器,它使直流电动机转速很快地跟随给定电压变化,而在电机稳态时可减小转速误差,如果采用PI调节器,则可实现无静差。
转速调节器对负载变化起抗扰作用,其输出限幅值决定电机允许的最大电流值。
电流调节器作为内环的调节器,在外环转速的调节过程中,使电流紧紧跟随其给定电压变化,及时抗扰。
在直流电动机转子转速动态过程中,电流调节器可以保证获得电机允许的最大电流,从而加快动态过程。
当电机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用。
设计内容设计要求双闭环总设计在设计双闭环调速系统时,一般是先内环后外环,调节器的结构和参数取决于稳态精度和动态校正的要求,双闭环调速系统动态校正的设计与调试都是按先内环后外环的顺序进行,在动态过程中可以认为外环对内环几乎无影响,而内环则是外环的一个组成环节。
对已知系统的固有特性做恰当的变换和近似处理,以简化调节器结构。
根据具体情况选定预期特性,即典型Ⅰ系统或典型Ⅱ系统,并按照零极点相消的原则,确定串联调节器的类型。
摘要转速、电流双闭环控制的直流调速系统是性能很好的直流调速系统,更是一种当前应用广泛、经济、适用的电力传动系统,它具有调速范围广、精度高、动态性能好和易于控制等优点,是各种交、直流电力拖动自动控制系统的重要基础,所以在电力传动系统中得到了广泛的应用。
基于设计题目,直流电动机调速控制器选用了转速、电流双闭环调速控制电路,调速系统的主电路采用了三相全控桥整流电路来供电。
本论文首先确定整个设计的方案和框图;然后确定主电路的参数以及框图中所需的电动机参数;本论文的重点设计是直流电动机的转速调节器和电流调节器的设计,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,在直流调速系统起动过程中只有电流负反馈,达到稳态转速后,只要转速负反馈,二者之间实行串级联接。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称做外环。
这就形成了转速、电流双闭环调速系统。
转速和电流两个调节器都采用PI调节器,这样构成的双闭环直流调速系统就能获得良好的静、动态性能。
最后采用MATLAB/SIMULINK对整个调速系统进行了仿真分析,使其满足工程设计参数指标。
关键词:电力传动;双闭环;直流调速系统;电流调节器;转速调节器AbstractSpeed, current double closed loop control of DC speed regulation system is a very good performance of the DC motor speed control system, is also a kind of wide applications, economic, applicable to electric drive system, it has a wide speed range, high precision, good dynamic performance and easy to control, is all kinds of AC, DC electric drive automatic control system important basis, so in electric drive automatic control system has been widely used. Based on the design of the subject, the DC motor speed controller, the speed, current double closed loop speed control circuit, control system's main circuit adopts a three-phase full-bridge controlled rectifier circuit to supply power. This paper firstly determine the whole design scheme and block diagram; then to determine the parameters of the main circuit and the block diagram of the desired motor parameters; the focus of this paper is the design of DC motor speed regulator and current regulator design, respectively, to adjust the speed and current, which are respectively introduced into the speed negative feedback and current negative feedback, in DC control system start process only the current negative feedback, to achieve steady speed, as long as the speed negative feedback, two between implementation of cascade connection. From the closed loop structure, the current loop on the inside, known as the inner ring; the speed loop outside, called outer ring. This form of speed, current double closed loop speed regulation system. Speed and two current regulators have adopted PI regulator, the DC double loop speed control system can obtain good static, dynamic performance. Finally using the MATLAB / SIMULINK on the speed regulation system simulation and analysis are carried out, in order to meet the engineering design parameters.Key words:power transmission;double closed loop;DC speed control system;current regulator;speed regulator目录摘要................................................................................................................................................... Abstract (I)目录 (II)第1章绪论.......................................................................................................................... - 0 -1.1 课题的背景、目的及意义......................................................................................... - 0 -1.2 课题研究的现状和发展趋势..................................................................................... - 0 -1.3 本课题采用的技术方案及技术难点......................................................................... - 1 -1.4 本设计的主要研究内容............................................................................................. - 2 -1.4.1 建立系统的数学模型...................................................................................... - 2 -1.4.2 经典控制部分.................................................................................................. - 2 -1.4.3仿真部分........................................................................................................... - 2 - 第2章双闭环调速系统的工作原理及数学模型.............................................................. - 3 -2.1 系统的参数测定......................................................................................................... - 3 -2.2 双闭环调速系统的工作原理..................................................................................... - 6 -2.2.1 转速控制的要求和调速指标.......................................................................... - 6 -2.2.2 调速系统的两个基本矛盾.............................................................................. - 6 -2.2.3 调速系统的双闭环调节原理.......................................................................... - 8 -2.2.4 双闭环调速系统的起动过程分析.................................................................. - 9 -2.2.5动态性能和转速、电流两个调节器的作用................................................. - 10 -2.3晶闸管—电动机主电路的设计................................................................................ - 12 -2.4 主电路参数计算....................................................................................................... - 12 -2.5 主电路的过电压和过电流保护............................................................................... - 13 -2.5.1 过电压保护.................................................................................................... - 13 -2.5.2 过电流保护.................................................................................................... - 13 - 第3章按工程设计方法设计双闭环调速系统的电流调节器和转速调节器.................. - 14 -3.1设计要求.................................................................................................................... - 14 -3.1.1基本数据(其中包括铭牌数据和测试数据)............................................. - 14 -3.1.2 设计指标........................................................................................................ - 15 -3.1.3 工程设计方法的基本思路............................................................................ - 15 -3.2电流调节器额定设计................................................................................................ - 16 -3.2.1电流环动态结构图的简化............................................................................. - 16 -3.2.2电流调节器结构的选择................................................................................. - 17 -3.2.3 电流调节器参数的计算................................................................................ - 18 -3.2.4电流环的动态性能指标................................................................................. - 19 -3.3转速调节器的设计.................................................................................................... - 20 -3.3.1电流环的等效闭环传递函数......................................................................... - 20 -3.3.2转速环的动态结构图及其近似处理............................................................. - 21 -3.3.3 转速调节器结构的选择.............................................................................. - 22 -3.3.4 转速调节器参数的计算................................................................................ - 23 -3.3.5 转速环的抗扰性能指标................................................................................ - 26 -3.4电流环、转速环开环对数幅频特性的比较............................................................ - 26 - 第4章调速系统性能指标的数字仿真.............................................................................. - 28 -4.1 基于工程设计的数字仿真....................................................................................... - 28 -4.2 时域分析................................................................................................................... - 29 - 参考文献.................................................................................................................................. - 30 - 结束语...................................................................................................................................... - 31 - 致谢.......................................................................................................................................... - 32 -第1章绪论1.1 课题的背景、目的及意义20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。
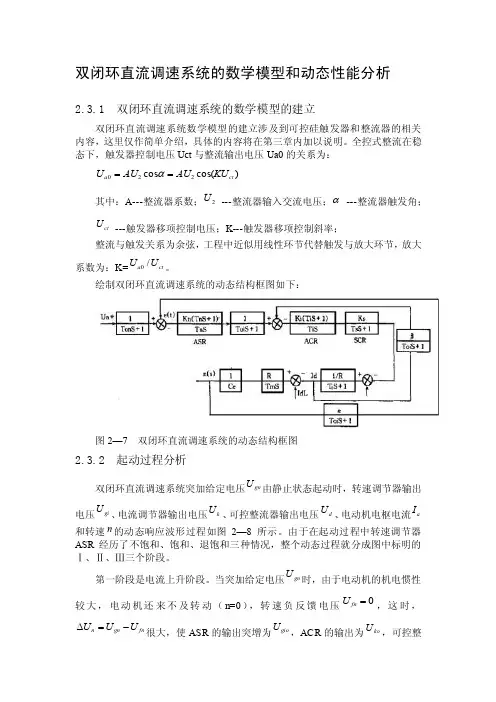
双闭环直流调速系统的数学模型和动态性能分析2.3.1 双闭环直流调速系统的数学模型的建立双闭环直流调速系统数学模型的建立涉及到可控硅触发器和整流器的相关内容,这里仅作简单介绍,具体的内容将在第三章内加以说明。
全控式整流在稳态下,触发器控制电压Uct 与整流输出电压Ua0的关系为:)cos(cos 220ct a KU AU AU U ==α其中:A---整流器系数;2U ---整流器输入交流电压;α ---整流器触发角; ct U ---触发器移项控制电压;K---触发器移项控制斜率;整流与触发关系为余弦,工程中近似用线性环节代替触发与放大环节,放大系数为:K=ct a U U /0。
绘制双闭环直流调速系统的动态结构框图如下:图2—7 双闭环直流调速系统的动态结构框图2.3.2 起动过程分析双闭环直流调速系统突加给定电压gn U 由静止状态起动时,转速调节器输出电压gi U 、电流调节器输出电压k U 、可控整流器输出电压d U 、电动机电枢电流a I 和转速n 的动态响应波形过程如图2—8所示。
由于在起动过程中转速调节器ASR 经历了不饱和、饱和、退饱和三种情况,整个动态过程就分成图中标明的Ⅰ、Ⅱ、Ⅲ三个阶段。
第一阶段是电流上升阶段。
当突加给定电压gn U 时,由于电动机的机电惯性较大,电动机还来不及转动(n=0),转速负反馈电压0=fn U ,这时,fn gn n U U U -=∆很大,使ASR 的输出突增为gio U ,ACR 的输出为koU ,可控整流器的输出为do U ,使电枢电流a I 迅速增加。
当增加到L a I I ≥(负载电流)时,电动机开始转动,以后转速调节器ASR 的输出很快达到限幅值gim U ,从而使电枢电流达到所对应的最大值am I (在这过程中d k U U ,的下降是由于电流负反馈所引起的),到这时电流负反馈电压与ACR 的给定电压基本上是相等的,即am fi gim I U U β=≈式中,β——电流反馈系数。

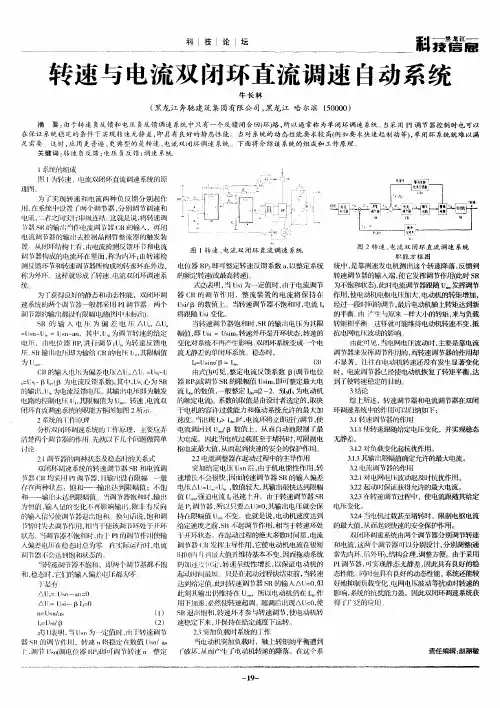
转速电流双闭环直流调速系统的研究和设计2600字摘要:在需要高性能调速控制的工业生产中,直流调速系统有着极其重要的作用。
分析了单闭环控制和双闭环控制各自的特点,若采用转速电流双闭环控制,可以使直流调速系统能更好地满足电机的动态性能要求,实现快速的启制动。
为此进行了双闭环直流调速系统的的设计,以实现电机的双闭环控制。
关键词:直流调速系统;电机;反馈;单闭环;双闭环调速系统是目前电力拖动自动控制系统中应用最广泛的系统,近年来,交流调速系统迅速发展,基本取代了直流调速系统,但是,直流电动机由于其结构简单、调速性能优良,直流拖动系统在理论和技术上都比较成熟,所以直流调速系统在生产生活中有着举足轻重的作用,目前的电力拖动自动控制系统中在需要高性能调速的领域大多采用直流调速系统。
1 单闭环和双闭环直流调速系统的概述直流调速系统目前虽然被交流调速取代,但是直流调速在某些场合大有用处,其中最简单的直流调速控制是采用单闭环控制,也就是系统中只有一个转速负反馈,可以实现对转速的自动控制。
单闭环控制的直流调速系统结构简单、工作稳定性好、可靠性高,当采用比例积分调节器还可以实现转速的无静差控制,但是,如果实际调速系统不仅要求转速稳定,还需要较高的调速动态性能时,比如要求调速系统能快速的起制动,系统在负载变化时能减小动态速降等,则单闭环控制的直流调速系统就难以满足要求了,主要原因在于单闭环控制的直流调速系统在工作时不能随心所欲地控制转矩和电流的动态变化过程,在单闭环直流调速系统中,虽然采用电流截止负反馈能控制电流,但这种反馈只能在电机超过临界电流值以后,靠强烈的负反馈作用来限制电流的冲击,并不能很理想地控制电流的动态变化波形。
在实际生产中需要频繁正、反转运行的直流调速系统,提高生产率的重要因素就是缩短起、制动过程的时间。
就这要求调速系统在起动和制动过程中,要始终保持电流为电机允许的最大值,以便使电磁转矩达到最大值,才能使调速系统以最大的加减速度运行,满足实际工作中对调速系统的要求。
摘要转速、电流双闭环控制直流调速系统是性能很好,应用最广的直流调速系统,是目前直流调速系统中的主流设备。
具有调速范围宽、平稳性好、稳速精度高等优点。
在理论和实践方面都是比较成熟的系统,在电力拖动领域中发挥着及其重要的作用。
本人此次设计的步骤主要是:查阅相关的资料、书籍,确定整个设计的方案和框图。
然后确定主电路的结构形式和各元部件的设计,同时对其参数的计算,包括整流变压器、晶闸管、电抗器和保护电路的参数计算。
接着驱动电路的设计包括触发电路和脉冲变压器的设计。
转速和电流调节器的计算和设计给予详细介绍。
每一步设计都会给出相应的原理图,并进行分析。
最后用学过的MATLAB/SIMULINK进行仿真,给出模块搭建及仿真图形的结果。
目录第1章系统总体设计 (1)1.1设计任务 (1)1.2设计要求 (1)1.3设计的基本思路 (1)第2章整体电路分析 (4)2.1电流调节器的设计 (4)2.2转速调节器的设计 (7)第3章硬件电路图及保护电路的设计 (10)3.1系统主电路图绘制 (10)3.2晶闸管的保护与选择 (10)3.3 整流变压器的选择 (13)3.4触发电路的设计 (14)3.5.电动机的励磁回路 (15)第4章MATLAB仿真 (16)结论 (19)参考资料 (20)第1章 系统总体设计1.1 设计任务设计一个V-M 转速、电流双闭环直流调速系统,相关数据:电动机参数:N P =40kw 、N U =300v 、N I =148A 、N n =910rpm 、f U =220v 、dm I =296A 、 2GD =1.00kg ⋅2m 、a R =0.08Ω、a L =2.05mH ;其它参数:整流侧内阻n R =0.092Ω、整流变压器漏感T L =7.5mH ,电抗器直流电阻H R =0.15Ω、电抗器电感H L =4.0mH 、负载2GD 折算值=9 kg ⋅2m ;电流、转速滤波时间常数参考教材例题数据。