电力系统继电保护毕业论文中英文资料外文翻译文献
- 格式:docx
- 大小:54.47 KB
- 文档页数:129
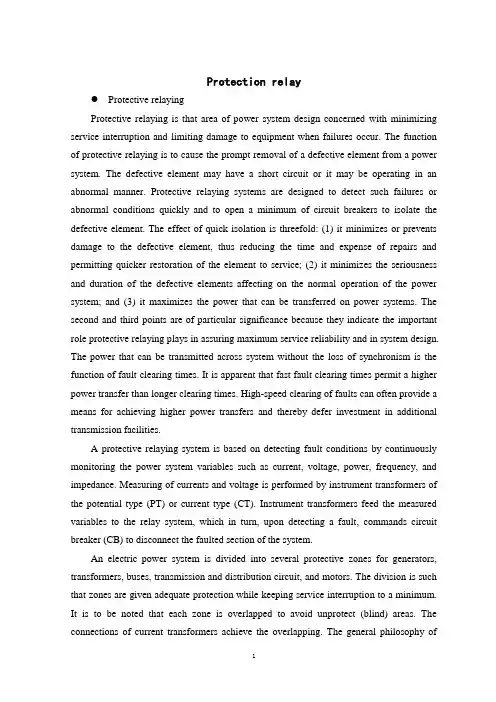
Protection relayProtective relayingProtective relaying is that area of power system design concerned with minimizing service interruption and limiting damage to equipment when failures occur. The function of protective relaying is to cause the prompt removal of a defective element from a power system. The defective element may have a short circuit or it may be operating in an abnormal manner. Protective relaying systems are designed to detect such failures or abnormal conditions quickly and to open a minimum of circuit breakers to isolate the defective element. The effect of quick isolation is threefold: (1) it minimizes or prevents damage to the defective element, thus reducing the time and expense of repairs and permitting quicker restoration of the element to service; (2) it minimizes the seriousness and duration of the defective elements affecting on the normal operation of the power system; and (3) it maximizes the power that can be transferred on power systems. The second and third points are of particular significance because they indicate the important role protective relaying plays in assuring maximum service reliability and in system design. The power that can be transmitted across system without the loss of synchronism is the function of fault clearing times. It is apparent that fast fault clearing times permit a higher power transfer than longer clearing times. High-speed clearing of faults can often provide a means for achieving higher power transfers and thereby defer investment in additional transmission facilities.A protective relaying system is based on detecting fault conditions by continuously monitoring the power system variables such as current, voltage, power, frequency, and impedance. Measuring of currents and voltage is performed by instrument transformers of the potential type (PT) or current type (CT). Instrument transformers feed the measured variables to the relay system, which in turn, upon detecting a fault, commands circuit breaker (CB) to disconnect the faulted section of the system.An electric power system is divided into several protective zones for generators, transformers, buses, transmission and distribution circuit, and motors. The division is such that zones are given adequate protection while keeping service interruption to a minimum. It is to be noted that each zone is overlapped to avoid unprotect (blind) areas. The connections of current transformers achieve the overlapping. The general philosophy ofrelay application is to divide the power system into zones that can be adequately protected by suitable protective equipment and can be disconnected from the power system in a minimum amount of time and with the least effect on the remainder of the power system. The protective relaying provided for each zone is divided into two categories: (1) primary relaying and (2) backup relaying. Primary relaying is the first line of defense when failures occur, and is connected to trip only the faulted element from the system. If a failure occurs in any primary zone the protective relays will operate to trip all of the breakers within that zone. If a breaker is omitted between two adjacent elements, both elements will be disconnected for a failure in either one. This latter arrangement is illustrated by the unit generator-transformer connection in the power plant. On bulk power generating and transmission systems, primary protection is designed to operate at high speed for all faults. Slower protection may be used in less important system areas but, in general, any system area will benefit by the fastest possible primary relaying.If the fault is not cleared by the primary protection, backup relaying operates to clear the fault from the system. In general, backup relaying disconnects a greater portion of the system to isolate the fault. Backup protection is provided for possible failure in the primary relaying system and for possible circuit breaker failures. Any backup scheme must provide both relay backup as well as breaker backup. Ideally, the backup protection should be arranged so that anything that may cause the primary protection to fail will not also cause failure of the backup protection. Moreover, the backup protection must not operate until the primary protection has been given an opportunity to function. As a result, there is time delay associated with any backup operation. When a short circuit occurs, both the primary and the backup protection start to operate. If the primary protection clears the fault, the backup protection will reset without completing its function. If the fault is not cleared by the primary protection, the backup relaying will time out and trip the necessary breakers to clear the fault from the system.There are two forms of backup protection in common use on power systems. They are remote backup and local backup.(1)Remote backup. In remote backup relaying, faults are cleared from the system onestation away from where the failure has occurred.(2)Local backup. In local backup relaying, faults are cleared locally in the samestation where the failure has occurred. For faults on the protected line, both the primary and the backup relays will operate to prepare tripping the line breaker. Relay backup may be just as fast as the front line relays. When either of these relays operates to initiate tripping of the line breaker, it also energizes a timer to start the breaker backup function. If the breaker fails to clear the fault, the line relays will remain picked up, permitting the timer to time out and trip the necessary other breakers on the associated bus section.Computer relayingThe electric power industry has been one of the earliest users of the digital computer as a fundamental aid in the various design and analysis aspects of its activity. Computer-based systems have evolved to perform such complex tasks as generation control, economic dispatch (treated in chapter 11)and load-flow analysis for planning and operation , to name just a few application areas. research efforts directed at the prospect using digital computers to perform the tasks involved in power system protection date back to the mien-sixties and were motivated by the emergence of process-control computers a great deal of research is going on in this field, which is now referred to as computer relaying. Up to the early 1980s there had been no commercially availability protection systems offering digital computer-based relays.However, the availability of microprocessor technology has provided an impetus to computer relaying.*Microprocessors used as a replace*and solid state relays non provide a number of advantages while meeting the basic protection philosophy requirement of decentralization.There are many perceived benefits of a digital relaying system:1.Economics: with the steady decrease in cost of digital hardware, coupled with theincrease in cost of conventional relaying. It seems reasonable to assume that computer relaying is an attractive alternative. Software development cost can be expected to be evened out by utilizing economies of scale in producing microprocessors dedicated to basic relaying tasks.2.Reliability: a digital system is continuously active providing a high level of aself-diagnosis to detect accidental failures within the digital relaying system.3.Flexibility: revisions or modifications made necessary by changing operationalconditions can be accommodated by utilizing the programmability features of a digitalsystem. This would lead to reduced inventories of parts for repair and maintenance purposes4.System interaction: the availability of digital hardware that monitors continuously thesystem performance at remote substations can enhance the level of information available to the control center. Post fault analysis of transient data can be performed on the basis of system variables monitored by the digital relay and recorded by the peripherals.The main elements of a digital computer-based relay are indicated in Figure 9-59. The input signals to the relay are analog (continuous) and digital power system variables. The digital inputs are of the order of five to ten and include status changes (on-off) of contacts and changes in voltage levels in a circuit. The analog signals are the 60-Hz currents and voltages. The number of analog signals needed depends on the relay function but is in the range of 3 to 30 in all cases. The analog signals are scaled down (attenuated) to acceptable computer input levels ( 10 volts maximum) and then converted to digital (discrete) form through analog/digital converters (ADC). These functions are performed in the block labeled “Analog Input Subsystem.”The digital output of the relay is available through the computer’s parallel output port, five-to-ten digital outputs are sufficient for most applications.The analog signals are sampled at a rate between 210 Hz to about 2000 Hz. The sampled signals are entered into the scratch pad (RAM) and are stored in a secondary data file for historical recording. A digital filter removes noise effects from the sampled signals. The relay logic program determines the functional operation of the relay and uses the filtered sampled signals to arrive at a trip or no trip decision which is then communicated to the system.The heart of the relay logic program is a relaying algorithm that is designed to perform the intended relay function such as over currents detection, differential protection, or distance protection, etc. It is not our intention in this introductory text to purse this involved in a relaying algorithm, we discuss next one idea for peak current detection that is the function of a digital over current relay.Microcomputer-based RelayingA newer development in the field of power system protection is the use of computers(usually microcomputers) for relaying. Although computers provide the same protection as that supplied by conventional relays, there are some advantages to the use of computer-based relaying. The logic capability and application expansion possibilities for computer-based, relaying is much greater than for electromechanical devices. Computer-base relaying samples the values of the current, voltage, and by use of A/D converters, change these analog values to digital form and then send them to the computer. In the event of a fault, the computer can calculate the fault’s current values and characteristics, and settings can be changed merely by reprogramming. Computer-based relaying are also capable of locating faults, which has been one of the most popular features in their application. In addition, self-checking features can be built in and sequence of events information can be downloaded to remote computers for fast analysis of relaying operations.Computer-based relaying system consists of subsystems with well defined functions. Although a specific subsystem may be different in some of its details, these subsystems are most likely to be incorporated in its design in some form. The block diagram in Figure 13-1 shows the principal subsystems of a computer-base relaying. The processor is the center of its organization. It is responsible for the execution of relaying programs, maintenance of various timing functions, and communicating with its peripheral equipment. Several types of memories are shown in Figure13-1-each of them serves a specific need. The Random Access Memory (RAM) holds the input sample data as they are brought in and processed. The Read Only Memory (ROM) or Programmable Read Only Memory (PROM) is used to store the programs permanently. In some cases the programs may execute directly from the ROM if its read time is short enough. If this is not the case, the programs must be copied from the ROM into the RAM during an initialization stage, and then the real-time execution would take place from the RAM. The Erasable PROM (EPROM) is needed for storing certain parameters (such as the relaying settings) which may be changed from time to time, but once it is set it must remain fixed even if the power supply to the computer is interrupted.The relaying inputs are currents and voltages—or, to a lesser extent—digital signals indicating contact status. The analog signals must be converted to voltage signals suitable for conversion to digital from. The current and voltage signals obtained from current andvoltage transformer secondary windings must be restricted to a full scale value of +10 volts. The current inputs must be converted to voltages by resistive shunts. As the normal current transformer secondary currents may be as high as hundreds of amperes, shunts of resistance of a few milliohms are needed to produce the desired voltage for the Analog to Digital Converter (ADC). An alternative arrangement would be to use an auxiliary current transformer to reduce the current to a lower level. An auxiliary current transformer serves another function: that of providing electrical isolation between the main CT secondary and the computer input system.Since the digital computer can be programmed to perform several functions as long as it has the input and output signals needed for those functions. It is a simple matter to the relaying computer to do many other substation tasks, for example, measuring and monitoring flows and voltages in transformers and transmission lines, controlling the opening and closing of circuit breakers and switches, providing backup for other devices that have failed, are all functions that can be taken over by the relaying computer. With the program ability and communication capability, the computer-based relaying offers yet another possible advantage that is not easily realizable in a conventional system. This is the ability to change the relay characteristics (settings) as the system conditions warrant it. With reasonable prospects of having affordable computer-based relaying which can be dedicated to a single protection function, attention soon turned to the opportunities offered by computer-based relaying to integrate them into a substation, perhaps even a system-wide network. Integrated computer systems for substations which handle relaying, monitoring, and control tasks offer novel opportunities for improving overall system performance.International Journal of Electrical Power & Energy Systems继电保护1. 继电器当故障发生的时候继电器将电力系统的停电范围减小到最小,并且减小对设备的破坏。
电力系统电力系统介绍随着电力工业的增长,与用于生成和处理当今大规模电能消费的电力生产、传输、分配系统相关的经济、工程问题也随之增多。
这些系统构成了一个完整的电力系统。
应该着重提到的是生成电能的工业,它与众不同之处在于其产品应按顾客要求即需即用。
生成电的能源以煤、石油,或水库和湖泊中水的形式储存起来,以备将来所有需。
但这并不会降低用户对发电机容量的需求。
显然,对电力系统而言服务的连续性至关重要。
没有哪种服务能完全避免可能出现的失误,而系统的成本明显依赖于其稳定性。
因此,必须在稳定性与成本之间找到平衡点,而最终的选择应是负载大小、特点、可能出现中断的原因、用户要求等的综合体现。
然而,网络可靠性的增加是通过应用一定数量的生成单元和在发电站港湾各分区间以及在国内、国际电网传输线路中使用自动断路器得以实现的。
事实上大型系统包括众多的发电站和由高容量传输线路连接的负载。
这样,在不中断总体服务的前提下可以停止单个发电单元或一套输电线路的运作。
当今生成和传输电力最普遍的系统是三相系统。
相对于其他交流系统而言,它具有简便、节能的优点。
尤其是在特定导体间电压、传输功率、传输距离和线耗的情况下,三相系统所需铜或铝仅为单相系统的75%。
三相系统另一个重要优点是三相电机比单相电机效率更高。
大规模电力生产的能源有:1.从常规燃料(煤、石油或天然气)、城市废料燃烧或核燃料应用中得到的蒸汽;2.水;3.石油中的柴油动力。
其他可能的能源有太阳能、风能、潮汐能等,但没有一种超越了试点发电站阶段。
在大型蒸汽发电站中,蒸汽中的热能通过涡轮轮转换为功。
涡轮必须包括安装在轴承上并封闭于汽缸中的轴或转子。
转子由汽缸四周喷嘴喷射出的蒸汽流带动而平衡地转动。
蒸汽流撞击轴上的叶片。
中央电站采用冷凝涡轮,即蒸汽在离开涡轮后会通过一冷凝器。
冷凝器通过其导管中大量冷水的循环来达到冷凝的效果,从而提高蒸汽的膨胀率、后继效率及涡轮的输出功率。
而涡轮则直接与大型发电机相连。
某钢铁企业变电所保护系统及防护系统设计1 绪论1.1 变电站继电保护的发展变电站是电力系统的重要组成部分,它直接影响整个电力系统的安全与经济运行,失恋系发电厂和用户的中间环节,起着变换和分配电能的作用,电气主接线是发电厂变电所的主要环节,电气主接线的拟定直接关系着全厂电气设备的选择、配电装置的布置、继电保护和自动装置的确定,是变电站电气部分投资大小的决定性因素。
继电保护的发展现状,电力系统的飞速发展对继电保护不断提出新的要求,电子技术、计算机技术与通信技术的飞速发展又为继电保护技术的发展不断地注入了新的活力,因此,继电保护技术得天独厚,在40余年的时间里完成了发展的4个历史阶段。
随着电力系统的高速发展和计算机技术、通信技术的进步,继电保护技术面临着进一步发展的趋势。
国内外继电保护技术发展的趋势为:计算机化,网络化,保护、控制、测量、数据通信一体化和人工智能化。
继电保护的未来发展,继电保护技术未来趋势是向计算机化,网络化,智能化,保护、控制、测量、数据通信一体化发展。
微机保护技术的发展趋势:①高速数据处理芯片的应用②微机保护的网络化③保护、控制、测量、信号、数据通信一体化④继电保护的智能化1.2本文的主要工作在本次毕业设计中,我主要做了关于某钢铁企业变电所保护系统及防护系统设计,充分利用自己所学的知识,严格按照任务书的要求,围绕所要设计的主接线图的可靠性,灵活性进行研究,包括:负荷计算、主接线的选择、短路电流计算,主变压器继电保护的配置以及线路继电保护的计算与校验的研究等等。
1.3 设计概述1.3.1 设计依据1)继电保护设计任务书。
2)国标GB50062-92《电力装置的继电保护和自动装置设计规范》3)《工业企业供电》1.3.2 设计原始资料本企业共有12个车间,承担各附属厂的设备、变压器修理和制造任务。
1、各车间用电设备情况用电设备明细见表1.1所示。
表1.1 用电设备明细表2、负荷性质本厂大部分车间为一班制,少数车间为两班或者三班制,年最大有功负荷利用小时数为h2300。
可编辑修改精选全文完整版电力系统电力系统介绍随着电力工业的增加,与用于生成和处置现今大规模电能消费的电力生产、传输、分派系统相关的经济、工程问题也随之增多。
这些系统组成了一个完整的电力系统。
应该着重提到的是生成电能的工业,它不同凡响的地方在于其产品应按顾客要求即需即用。
生成电的能源以煤、石油,或水库和湖泊中水的形式贮存起来,以备以后所有需。
但这并非会降低用户对发电机容量的需求。
显然,对电力系统而言服务的持续性相当重要。
没有哪一种服务能完全幸免可能显现的失误,而系统的本钱明显依托于其稳固性。
因此,必需在稳固性与本钱之间找到平稳点,而最终的选择应是负载大小、特点、可能显现中断的缘故、用户要求等的综合表现。
但是,网络靠得住性的增加是通过应用必然数量的生成单元和在发电站港湾各分区间和在国内、国际电网传输线路中利用自动断路器得以实现的。
事实上大型系统包括众多的发电站和由高容量传输线路连接的负载。
如此,在不中断整体服务的前提下能够停止单个发电单元或一套输电线路的运作。
现此生成和传输电力最普遍的系统是三相系统。
相关于其他交流系统而言,它具有简便、节能的优势。
尤其是在特定导体间电压、传输功率、传输距离和线耗的情形下,三相系统所需铜或铝仅为单相系统的75%。
三相系统另一个重要优势是三相电机比单相电机效率更高。
大规模电力生产的能源有:1.从常规燃料(煤、石油或天然气)、城市废料燃烧或核燃料应用中取得的蒸汽;2.水;3.石油中的柴油动力。
其他可能的能源有太阳能、风能、潮汐能等,但没有一种超越了试点发电站时期。
在大型蒸汽发电站中,蒸汽中的热能通过涡轮轮转换为功。
涡轮必需包括安装在轴承上并封锁于汽缸中的轴或转子。
转子由汽缸周围喷嘴喷射出的蒸汽流带动而平稳地转动。
蒸汽流撞击轴上的叶片。
中央电站采纳冷凝涡轮,即蒸汽在离开涡轮后会通过一冷凝器。
冷凝器通过其导管中大量冷水的循环来达到冷凝的成效,从而提高蒸汽的膨胀率、后继效率及涡轮的输出功率。
河南理工大学HENAN POLYTECHNIC UNIVERSITY英文文献翻译En glish literature tran slati on学院:电气工程与自动化学院专业班级:___________ 电气11-4班_______ 姓名: __________________ 宋家鹏_______ 学号:311008001120 __________ 扌旨导老师:____________ 汪旭东_______2014年6月5日河南理工大学HENAN POLYTECHNIC UNIVERSITY2.5 对称三相电路在这一部分,我们介绍三相对称电路的一下几个话题:丫连接,相电压,线电压,线电流,△形连接负荷,△ - Y变换,以及等效的相图。
c Ca Ab B图2-10三相Y连接电源带Y连接对称负荷电路图对称Y连接图2-10显示的是一个三相Y连接电源带Y连接对称负荷电路图。
对于Y连接电路,每个相的中性点是连接起来的。
在图2-10中电源中性点标记的是n,而负载中性点标记的是N。
把三相电源假设为理想电源,即阻抗忽略不计。
同时,电源和负载之间线路阻抗,中性点n与N之间的线路阻抗也可忽略不计。
三相负荷是对称的,意味着三相之中任意两相间的阻抗是相同的。
对称相电压在图2-10中,三相电源的终端呗标记为a、b、c,电源相电压标记为E an ,E bn,E cn,当电源的三相电压有相同的幅度,任意两相之间互差120度角时,电源是对称的。
当以E an 作为参考相量时,相电压的幅值是10V,对称三相相电压如下所示:E an=10 0E bn10 120 10 240 (2.5.1 )E cn10 120 10 240河南理工大学HENAN POLYTECHNIC UNIVERSITY图2-11以E an 作为参考的对称正序相电压向量图当E an 超前E bn 120度,E bn 超前E cn 以120度角时,此时的相序称为正相序或 者abc 相序。
中文3826字附录1:外文资料翻译A1.1 Substation and Power System ProtectionWith the development of undertaking of the electric wire netting , the pattern of national network has already taken shape basically. Scientific and technological level raise, electric environmental protection can strengthen, make scientific and technological competence and advanced international standards, Chinese of power industry close day by day. Electric management level and service level are being improved constantly, strategic planning management of electric power development, production operate manage , electric market administration and electric information management level , high-quality service level ,etc. general to raise enterprise.The purpose of a substation is to transform the characteristics of the electrical energy supplied to some form suitable for use, as for example, a conversion from alternation current to direct current for the use of city railway service, or a change from one voltage to another, or one frequency to another. Their functions include: Tap.─TO be economical, transmission of larger amounts of power over long distances must be done at voltages above 110,000 volts. Substations for supplying small amounts of power from such high-voltage lines are not satisfactory from the standpoint of operation and are also uneconomical. It is, therefore, common practice to install a few substations at advantageous points along the high-tension lines and step down the high-transmission voltage to a lower secondary-transmission voltage from which numerous small loads may be supplied.Distribution.─Any substation that is used to transform electrical energy to a potential that is low enough for general distribution and utilization is a distributing substation. Such a substation will generally receive its energy over a few comparatively high-tension lines and distribute it over a large number of low-voltage lines.Industrial.─When fairly large blocks of power are required by industrial plants, it often becomes necessary and advisable to install an individual substation to supply such a load directly from the main high-voltage line or secondary line of lower voltage. Its simplest form would comprise only switching equipment, there being no voltage transformation. In most cases a voltage transformation is probably needed; hence transformer equipment is included.Sectionalizing.─In very long high-voltage large capacity lines, particularly when several circuits are run in parallel, it is often necessary to split the lines into sections, in order that proper protection to the line and service can be obtained. Such a substation is , therefore, helpful in sectionalizing damaged sections of a line, providing continuity of service. Such a substation will generally comprise only switching equipment. In long lines it may also serve to supply power-factor-correcting equipment.Transmission-line Supply.─It is becoming more and more common to install the high-tension equipment of apower plant outdoors, the installation becoming nothing more than a step-up substation receiving its power at generator voltage, then stepping up its voltage and finally sending it out over high-voltage transmission lines. Such a substation is nothing more than an outdoor distributing substation turned around, the voltage being stepped up instead of stepped down.Power-factor Correction.─The voltage at the end of long lines tends to increase as the load supplied is decreased, while on the other hand it tends to decrease as the load is increased. Owing to the inductance and capacity effects, this variation in voltage is accompanied by a wide variation in power factor of a line, it is necessary to use synchronous condensers at the end of the line. To supply such a machine the transmission-line voltage must be stepped down, hence a power-factor-correcting substation will include switching equipment, transformers, and all equipment necessary for the operation of synchronous condensers.Railway.─Substations supplying railways may be generally classified under two heads, namely, as alternating current and as direct current. In the cases of alternating-current substations the problem is generally one of voltage transformation and of supplying single-phase power to the trains. It is, however, possible to supply single-phase to three-phase inside the locomotive by the use of a phase converter. In the case of direct-current railways, the substations are generally supplied whit three-phase power and converted to direct current by means of rotary converters, motor-generator sets, or rectifiers.Direct current for Light and Power.─There are still a few sections in some of out large cities, which are supplied with direct-current three-wire systems. Such a supply is invariably obtained from synchronous converters. There are also certain types of motor loads in industrial plants, which require direct current.Because many cities have experience rapid growth, their substations have often reached the limits of their capacity. As a result, downtown distribution systems are often overworked and many need a major, overhaul, overhaul, or expansion. However, space is scarce. Downtown business owners do not want “ugly” new substation marring the area’s appearance, but nor do businesses and residents grid the prospect of grid disturbances.One example of a system capable of integrating equipment monitoring with substation automation is the GE Harris integrated Substation Control System (ISCS). The system can integrate data from both substation system and equipment online monitoring devices into a common data base. The data can then be processed by an expert system into information on the status and health of monitored equipment using self-diagnostic programs. This information is then sent to a CMMS for automatic generation and tracking of maintenance work orders leads directly to the significant efficiencies found with condition-based maintenance programs.ABB Power and its industry partners have combined to develop the ABB Power System software. The system contains a diagnostic and maintenance system that reports necessary maintenance before failure. It allows utilities and industrial customers to easily expand from a single computer to a full system, without re-engineering.the directional protection basisEarly attempts to improve power-service reliability to loads remote from generation led to the dual-line concept. Of course, it is possible to build two lines to a load, and switch the load to whichever line remains energized after adisturbance. But better service continuity will be available if both lines normally feed the load and only the faulted line is tripped when disturbances occur. Fig.14-1 shows a single-generator, two-line, single-load system with breakers properly arranged to supply the load when one line is faulted. For the arrangement to be effective it is necessary to have the proper relay application. Otherwise, the expensive power equipment will not be able to perform as planned. Consider the application of instantaneous and/or time delay relays on the four breakers. Obviously the type of the relay cannot coordinate for all line faults. For example, a fault on the line terminals of breaker D. D tripping should be faster than B, however, the condition reverses and B should be faster than D. It is evident that the relay protection engineer must find some characteristic other than time delay if relay coordination is to be achieved.The magnitude of the fault current through breakers B and D is the same, regardless of the location of the fault on the line terminal of breaker B or D. Therefore relay coordination must be based on characteristics other than a time delay that starts from the time of the fault. Observe that the direction of current flowing through either breaker B or D is a function of which line the fault is on. Thus for a fault on the line between A and B, the current flows out of the load bus through breaker B toward the fault. At breaker D the current flows toward the load bus through breaker D. In this case breaker B should trip, but breaker D should not trip. This can be accomplished by installing directional relays on breakers B and D that are connected in such a way that they will trip only when current flows through them in a direction away from the load bus.Relay coordination for the system shown in Fig.14-1 can now be achieved by their - salvations of directional over current time delay relays on breakers B and D. Breakers A and C can have no directional over current time delay relays. They may also now have instantaneous relays applied. The relays would be set as follows: The directional relays could be set with no intentional time delay. They will have inherent time delay. The time delay over current relays on breakers A and C would have current settings that would permit them to supply backup protection for faults on the load bus and for load equipment faults. The instantaneous elements on breakers A and C would have current settings that would not permit them to detect faults on the load bus. Thus the lines between the generator and the load would have high-speed protection over a considerable portion of their length. It should be observed that faults on the line terminals of breakers A and C can collapse the generator voltage. The instantaneous relays on breakers A and C cannot clear the circuit instantaneously, because it takes time for power equipment to operate. During this period there will be little or no current flow through breakers B and D. Therefore, B or D cannot operate for this fault condition until the appropriate breaker at the generating station has operated. This is known as sequential tripping. Usually, it is acceptable under such conditions.Direction of current flow on an a. c. system is determined by comparing the current vector with some other reference vector, such as a voltage vector. In the system of Fig. 14-1 the reference voltage vector would be derived from the voltages on the load bus. Direction of current or power flow cannot be determined instantaneously on a. c. systems whose lines and equipment contain reactance. This is apparent from the fact that when voltage exists, the lagging current can be plus or minus or zero, depending on the instant sampled in the voltage cycle. Accordingly, the vector quantities must be sampled over a time period. The time period for reasonably accurate sampling may be fromone-half to one cycle. Work is proceeding on shorter sampling periods where predicting circuits are added to the relay to attempt to establish what the vectors will be at some future time. The process is complex, because it must make predictions during the time when electrical transients exist on the system. Usually, the shorter the time allowed for determining direction, the less reliable will be the determination.differential protectionMuch of the apparatus used on a power system has small physical dimensions when compared to the length of general transmission-line circuits. Therefore, the communications between the apparatus terminals may be made very economically and very reliably by the use of direct wire circuit connections. This permits the application of a simple and usually very effective type of differential protection. In concept, the current entering the apparatus is simply compared against the current leaving the apparatus. If there is difference between the two currents, the apparatus is tripped. If there is no difference in the currents, the apparatus is normal and no tripping occurs. Such schemes can usually be made rather sensitive to internal faults and very insensitive to external faults. Therefore, relay coordination is inherent in the differential relay scheme.The simplest application of differential relaying is shown in Fig. 14-4. Here one simple power conductor is protected by a differential relay. The relay itself usually consists of three coils, one of which is the coil that detects the difference current and initiates circuit tripping. It is called the operating coil and is designated by an O in the figure. The other two coils are restraint coils and are designated by R in the figure. The restraint coils serve a practical purpose. They prevent operation for small differences in the two current transformers that can never be exactly identical, as a result of manufacturing and other differences. Otherwise, the restraint coils serve no theoretical purpose. Fig. 14-4 shows the condition of current flow for an external fault during which the relay should not trip. The current I1 enter and leaves the power circuit without change. The current transformers are assumed to have a 1 : 1 ratio for simplicity, and their secondary windings are connected to circulate the I1 currents through the restraint coils of the differential relay only. If current left or entered the power circuit between the two current transformers (an internal fault), then the currents in the transformers would be different, and the difference current would flow through the operating coil of the relay.本文译自《电力英语阅读》A1.2 变电站与电力系统继电保护随着电力电网事业的发展,全国联网的格局已基本形成。
电力系统继电保护论文中英文资料Relay protection development present situation[Abstract ]reviewed our country electrical power system relay protection technological devil orpiment process,has outlined the microcomputer relay protection technology achievement, pro posed the future relay protection technological development tendency will be: Computerizes, n networked,protects, the control,the survey,the data communication integration and the artificial I intellectualization.[Key word ]relay protection present situation development,relay protections future development1 relay protection development present situationThe electrical power system rapid development to the relay protection proposed unceasingly t he new request,the electronic technology,computer technology and the communication rapid development unceasingly has poured into the new vigor for the relay protection technology de velopment,therefore,the relay protection technology is advantageous, has completed the deve lopment 4 historical stage in more than 40 years time。
供电毕设(含外文文献+中文翻译)某钢铁企业变电所保护系统及防护系统设计1 绪论1.1 变电站继电保护的发展变电站是电力系统的重要组成部分,它直接影响整个电力系统的安全与经济运行,失恋系发电厂和用户的中间环节,起着变换和分配电能的作用,电气主接线是发电厂变电所的主要环节,电气主接线的拟定直接关系着全厂电气设备的选择、配电装置的布置、继电保护和自动装置的确定,是变电站电气部分投资大小的决定性因素。
继电保护的发展现状,电力系统的飞速发展对继电保护不断提出新的要求,电子技术、计算机技术与通信技术的飞速发展又为继电保护技术的发展不断地注入了新的活力,因此,继电保护技术得天独厚,在40余年的时间里完成了发展的4个历史阶段。
随着电力系统的高速发展和计算机技术、通信技术的进步,继电保护技术面临着进一步发展的趋势。
国内外继电保护技术发展的趋势为:计算机化,网络化,保护、控制、测量、数据通信一体化和人工智能化。
继电保护的未来发展,继电保护技术未来趋势是向计算机化,网络化,智能化,保护、控制、测量、数据通信一体化发展。
微机保护技术的发展趋势:①高速数据处理芯片的应用②微机保护的网络化③保护、控制、测量、信号、数据通信一体化④继电保护的智能化1.2本文的主要工作在本次毕业设计中,我主要做了关于某钢铁企业变电所保护系统及防护系统设计,充分利用自己所学的知识,严格按照任务书的要求,围绕所要设计的主接线图的可靠性,灵活性进行研究,包括:负荷计算、主接线的选择、短路电流计算,主变压器继电保护的配置以及线路继电保护的计算与校验的研究等等。
1.3 设计概述1.3.1 设计依据1)继电保护设计任务书。
2)国标GB50062-92《电力装置的继电保护和自动装置设计规范》3)《工业企业供电》1.3.2 设计原始资料本企业共有12个车间,承担各附属厂的设备、变压器修理和制造任务。
1、各车间用电设备情况用电设备明细见表1.1所示。
表1.1 用电设备明细表2、负荷性质本厂大部分车间为一班制,少数车间为两班或者三班制,年最大有功负荷利用小时数为h2300。
文献综述【摘要】在我国电力系统继保护技术发展的过程中,概述了微机继电保护技术的成就,提出了未来继电保护技术发展趋势将是:计算机化,电网络化,保护,控制,调查结果显示,数据通信一体化和人工智能化。
[ Abstract ]reviewed our country electrical power system relay protection techno logical development process, has outlined the microcomputer relay protection techno logy achievement, proposed the future relay protection technological development te ndency will be: Computerizes, networked, protects, the control, the survey, the data communication integration and the artificial intellectualization【关键词】继电保护现状发展,继电保护的未来发展【Key word】relay protection present situation development,relay protections f uture development1 继电保护发展现状电力系统的迅速发展对继电保护不断提出新的要求,电子技术,计算机技术的快速发展不断为继电保护技术的发展注入新的活力,因此,继电保护技术是有利的,在40多年的时间里已完成发展了4个历史阶段。
建国后,我国继电保护学科、继电保护设计、继电器制造工业和继电保护技术队伍从无到有,在大约10年的时间里走过了先进国家半个世纪走过的道路。
50年代,我国工程技术人员创造性地吸收、消化、掌握了国外先进的继电保护设备性能和运行技术,建成了一支具有深厚继电保护理论造诣和丰富运行经验的继电保护技术队伍,对全国继电保护技术队伍的建立和成长起了指导作用。
毕业设计(论文)外文资料翻译专业名称:电力系统自动化英文资料:INDUCTION MOTOR STARTING METHODSAbstract -Many methods can be used to start large AC induction motors. Choices such as full voltage, reduced voltage either by autotransformer or Wyes - Delta, a soft starter, or usage of an adjustable speed drive can all have potential advantages and trade offs. Reduced voltage starting can lower the starting torque and help prevent damage to the load. Additionally, power factor correction capacitors can be used to reduce the current, but care must be taken to size them properly. Usage of the wrong capacitors can lead to significant damage. Choosing the proper starting method for a motor will include an analysis of the power system as well as the starting load to ensure that the motor is designed to deliver the needed performance while minimizing its cost. This paper will examine the most common starting methods and their recommended applications.I. INTRODUCTIONThere are several general methods of starting induction motors: full voltage, reduced voltage, wyes-delta, and part winding types. The reduced voltage type can include solid state starters, adjustable frequency drives, and autotransformers. These, along with the full voltage, or across the line starting, give the purchaser a large variety of automotives when it comes to specifying the motor to be used in a given application. Each method has its own benefits, as well as performance trade offs. Proper selection will involve a thorough investigation of any power system constraints, the load to be accelerated and the overall cost of the equipment.In order for the load to be accelerated, the motor must generate greater torque than the load requirement. In general there are three points of interest on the motor's speed-torque curve. The first is locked-rotor torque (LRT) which is the minimum torque which the motor will develop at rest for all angular positions of the rotor. The second is pull-up torque (PUT) which is defined as the minimum torque developed by the motor during the period of acceleration from rest to the speed at which breakdown torque occurs. The last is the breakdown torque (BDT) which is defined as the maximum torque which the motor will develop. If any of these points are below the required load curve, then the motor will not start.The time it takes for the motor to accelerate the load is dependent on the inertia of the load and the margin between the torque of the motor and the load curve, sometimes called accelerating torque. In general, the longer the time it takes for the motor to accelerate the load, the more heat that will be generated in the rotor bars, shorting ring and the stator winding. This heat leads to additional stresses in these parts and can have an impaction motor life.II. FULL VOLTAGEThe full voltage starting method, also known as across the line starting, is the easiest method to employ, has the lowest equipment costs, and is the most reliable. This method utilizes a control to close a contactor and apply full line voltage to the motor terminals. This method will allow the motor to generate its highest starting torque and provide the shortest acceleration times.This method also puts the highest strain on the power system due to the high starting currents that can be typically six to seven times the normal full load current of the motor. If the motor is on a weak power system, the sudden high power draw can cause a temporary voltage drop, not only at the motor terminals, but the entire power bus feeding the starting motor. This voltage drop will cause a drop in the starting torque of the motor, and a drop in the torque of any other motor running on the power bus. The torque developed by an induction motor varies roughly as the square of the applied voltage. Therefore, depending on the amount of voltage drop, motors running on this weak power bus could stall. In addition, many control systems monitor under voltage conditions, a second potential problem that could take a running motor offline during a full voltage start. Besides electrical variation of the power bus, a potential physical disadvantage of an across the line starting is the sudden loading seen by the driven equipment. This shock loading due to transient torques which can exceed 600% of the locked rotor torque can increase the wear on the equipment, or even cause a catastrophic failure if the load can not handle the torques generated by the motor during staring.A. Capacitors and StartingInduction motors typically have very low power factor during starting and as a result have very large reactive power draw. See Fig. 2. This effect on the system can be reduced by adding capacitors to the motor during starting.The large reactive currents required by the motor lag the applied voltage by 90 electrical degrees. This reactive power doesn't create any measurable output, but is rather the energy required for the motor to function. The product of the applied system voltage and this reactive power component can be measured in V ARS (volt-ampere reactive). The capacitors act to supply a current that leads the applied voltage by 90 electrical degrees. The leading currents supplied by the capacitors cancel the laggingcurrent demanded by the motor, reducing the amount of reactive power required to be drawn from the power system.To avoid over voltage and motor damage, great care should be used to make sure that the capacitors are removed as the motor reaches rated speed, or in the event of a loss of power so that the motor will not go into a generator mode with the magnetizing currents provided from the capacitors. This will be expanded on in the next section and in the appendix.B. Power Factor CorrectionCapacitors can also be left permanently connected to raise the full load power factor. When used in this manner they are called power factor correction capacitors. The capacitors should never be sized larger than the magnetizing current of the motor unless they can be disconnected from the motor in the event of a power loss.The addition of capacitors will change the effective open circuit time constant of the motor. The time constant indicates the time required for remaining voltage in the motor to decay to 36.8% of rated voltage after the loss of power. This is typically one to three seconds without capacitors.With capacitors connected to the leads of the motor, the capacitors can continue to supply magnetizing current after the power to the motor has been disconnected. This is indicated by a longer time constant for the system. If the motor is driving a high inertia load, the motor can change over to generator action with the magnetizingCurrent from the capacitors and the shaft driven by the load. This can result in the voltage at the motor terminals actually rising to nearly 50% of rated voltage in some cases. If the power is reconnected before this voltage decays severe transients can be created which can cause significant switching currents and torques that can severely damage the motor and the driven equipment. An example of this phenomenon is outlined in the appendix.Ⅲ. REDUCED VOLTAGEEach of the reduced voltage methods are intended to reduce the impact of motor starting current on the power system by controlling the voltage that the motor sees atthe terminals. It is very important to know the characteristics of the load to be started when considering any form of reduced voltage starting. The motor manufacturer will need to have the speed torque curve and the inertia of the driven equipment when they validate their design. The curve can be built from an initial, or break away torque, as few as four other data points through the speed range, and the full speed torque for the starting condition. A centrifugal or square curve can be assumed in many cases, but there are some applications where this would be problematic. An example would be screw compressors which have a much higher torque requirement at lower speeds than the more common centrifugal or fan load. See Fig. 3. By understanding the details of the load to be started the manufacturer can make sure that the motor will be able to generate sufficient torque to start the load, with the starting method that is chosen.A. AutotransformerThe motor leads are connected to the lower voltage side of the transformer. The most common taps that are used are 80%, 65%, and 50%. At 50% voltage the current on the primary is 25% of the full voltage locked rotor amps. The motor is started with this reduced voltage, and then after a pre-set condition is reached the connection is switched to line voltage. This condition could be a preset time, current level, bus volts, or motor speed. The change over can be done in either a closed circuit transition, or an open circuit transition method. In the open circuit method the connection to the voltage is severed as it is changed from the reduced voltage to the line level. Care should be used to make sure that there will not be problems from transients due to the switching. This potential problem can be eliminated by using the closed circuit transition. With the closed circuit method there is a continuousVoltage applied to the motor. Another benefit with the autotransformer starting is in possible lower vibration and noise levels during starting.Since the torque generated by the motor will vary as the square of the applied voltage, great care should be taken to make sure that there will be sufficient accelerating torque available from the motor. A speed torque curve for the driven equipment along with the inertia should be used to verify the design of the motor. A good rule of thumb is to have a minimum of 10% of the rated full load torque of the motor as a margin at all points of the curve.Additionally, the acceleration time should be evaluated to make sure that the motor has sufficient thermal capacity to handle the heat generated due to the longeracceleration time.B. Solid State or Soft StartingThese devices utilize silicon controlled rectifiers or Scars. By controlling the firing angle of the SCR the voltage that the device produces can be controlled during the starting of the motor by limiting the flow of power for only part of the duration of the sine wave.The most widely used type of soft starter is the current limiting type. A current limit of 175% to 500% of full load current is programmed in to the device. It then will ramp up the voltage applied to the motor until it reaches the limit value, and will then hold that current as the motor accelerates.Tachometers can be used with solid state starters to control acceleration time. Voltage output is adjusted as required by the starter controller to provide a constant rate of acceleration.The same precautions in regards to starting torque should be followed for the soft starters as with the other reduced voltage starting methods. Another problem due to the firing angle of the SCR is that the motor could experience harmonic oscillating torques. Depending on the driven equipment, this could lead to exciting the natural frequency of the system.C. Adjustable Frequency DrivesThis type of device gives the greatest overall control and flexibility in starting induction motors giving the most torque for an amount of current. It is also the most costly.The drive varies not only the voltage level, but also the frequency, to allow the motor to operate on a constant volt per hertz level. This allows the motor to generate full load torque throughout a large speed range, up to 10:1. During starting, 150% of rated current is typical.This allows a significant reduction in the power required to start a load and reduces the heat generated in the motor, all of which add up to greater efficiency. Usage of the AFD also can allow a smaller motor to be applied due to the significant increase of torque available lower in the speed range. The motor should still be sizedlarger than the required horsepower of the load to be driven. The AFD allows a great degree of control in the acceleration of the load that is not as readily available with the other types of reduced voltage starting methods.The greatest drawback of the AFD is in the cost relative to the other methods. Drives are the most costly to employ and may also require specific motor designs to be used. Based on the output signal of the drive, filtered or unfiltered, the motor could require additional construction features. These construction features include insulated bearings, shaft grounding brushes, and insulated couplings due to potential shaft current from common mode voltage. Without these features, shaft currents, which circulate through the shaft to the bearing, through the motor frame and back, create arcing in the bearings that lead to premature bearing failure, this potential for arcing needs to be considered when applying a motor/drive package in a hazardous environment, Division2/Zone2.An additional construction feature of a motor used on an AFD may require is an upgraded insulation system on the motor windings. An unfiltered output signal from a drive can create harmonic voltage spikes in the motor, stressing the insulation of the motor windings.It is important to note that the features described pertain to motors which will be started and run on an AFD. If the drive is only used for starting the motor, these features may not be necessary. Consult with the motor manufacturer for application specific requirements.D. Primary Resistor or Reactor StartingThis method uses either a series resistor or reactor bank to be placed in the circuit with the motor. Resistor starting is more frequently used for smaller motors.When the motor is started, the resistor bank limits the flow of inrush current and provides for a voltage drop at the motor terminals. The resistors can be selected to provide voltage reductions up to 50%. As the motor comes up to speed, it develops a counter EMF (electro-magnetic field) that opposes the voltage applied to the motor. This further limits the inrush currents. As the inrush current diminishes, so does t>e voltage drop across the resistor bank allowing the torque generated by the motor to increase. At a predetermined time a device will short across the resistors and open the starting contactor effectively removing the resistor bank from the circuit. This provides for a closed transition and eliminates the concerns due to switchingtransients.Reactors will tend to oppose any sudden changes in current and therefore act to limit the current during starting. They will remain shorted after starting and provide a closed transition to line voltage.E .Star delta StartingThis approach started with the induction motor, the structure of each phase of the terminal are placed in the motor terminal box. This allows the motor star connection in the initial startup, and then re-connected into a triangle run. The initial start time when the voltage is reduced to the original star connection, the starting current and starting torque by 2 / 3. Depending on the application, the motor switch to the triangle in the rotational speed of between 50% and the maximum speed. Must be noted that the same problems, including the previously mentioned switch method, if the open circuit method, the transition may be a transient problem. This method is often used in less than 600V motor, the rated voltage 2.3kV and higher are not suitable for star delta motor start method.Ⅴ. INCREMENT TYPEThe first starting types that we have discussed have deal with the way the energy is applied to the motor. The next type deals with different ways the motor can be physically changed to deal with starting issues.Part WindingWith this method the stator of the motor is designed in such a way that it is made up of two separate windings. The most common method is known as the half winding method. As the name suggests, the stator is made up of two identical balanced windings. A special starter is configured so that full voltage can be applied to one half of the winding, and then after a short delay, to the second half. This method can reduce the starting current by 50 to 60%, but also the starting torque. One drawback to this method is that the motor heating on the first step of the operation is greater than that normally encountered on across-the-line start. Therefore the elapsed time on the first step of the part winding start should be minimized. This method also increases the magnetic noise of the motor during the first step.IV .ConclusionThere are many ways asynchronous motor starting, according to the constraints of power systems, equipment costs, load the boot device to select the best method. From the device point of view, was the first full-pressure launch the cheapest way, but it may increase the cost efficiency in the use of, or the power supply system in the region can not meet their needs. Effective way to alleviate the buck starts the power supply system, but at the expense of the cost of starting torque.These methods may also lead to increased motor sizes have led to produce the required load torque. Inverter can be eliminated by the above two shortcomings, but requires an additional increase in equipment costs. Understand the limitations of the application, and drives the starting torque and speed, allowing you for your application to determine the best overall configuration.英文资料翻译:异步电动机起动的方法摘要:大容量的交流异步电动机有多种启动方法。
Electric Power SystemElectrical power system refers to remove power and electric parts of the part,It includes substation, power station and distribution. The role of the power grid is connected power plants and users and with the minimum transmission and distribution network disturbance through transport power, with the highest efficiency and possibility will voltage and frequency of the power transmission to the user fixed .Grid can be divided into several levels based on the operating voltage transmission system, substructure, transmission system and distribution system, the highest level of voltage transmission system is ZhuWangJia or considered the high power grids. From the two aspects of function and operation, power can be roughly divided into two parts, the transmission system and substation. The farthest from the maximum output power and the power of the highest voltage grade usually through line to load. Secondary transmission usually refers to the transmission and distribution system is that part of the middle. If a plant is located in or near the load, it might have no power. It will be direct access to secondary transmission and distribution system. Secondary transmission system voltage grade transmission and distribution system between voltage level. Some systems only single second transmission voltage, but usually more than one. Distribution system is part of the power system and its retail service to users, commercial users and residents of some small industrial users. It is to maintain and in the correct voltage power to users responsible. In most of the system, Distribution system accounts for 35% of the total investment system President to 45%, and total loss of system of the half .More than 220kv voltage are usually referred to as Ultra high pressure, over 800kv called high pressure, ultra high voltage and high pressure have important advantages, For example, each route high capacity, reduce the power needed for the number of transmission. In as high voltage to transmission in order to save a conductor material seem desirable, however, must be aware that high voltage transmission can lead to transformer, switch equipment and other instruments of spending increases, so, for the voltage transmission to have certain restriction, allows it to specific circumstances in economic use. Although at present, power transmission most is through the exchange of HVDC transmission, and the growing interest in, mercury arc rectifier and brake flow pipe into the ac power generation and distribution that change for the high voltage dc transmission possible.Compared with the high-voltage dc high-voltage ac transmission has the following some advantages: (1) the communication with high energy; (2) substation of simple maintenance and communication cost is low; (3) ac voltage can easily and effectively raise or lower, it makes the power transmission and high pressure With safety voltage distributionHVDC transmission and high-voltage ac transmission has the following advantages: (1) it only need two phase conductors and ac transmission to three-phase conductors; (2) in the dc transmission impedance, no RongKang, phase shift and impact overvoltage; (3) due to the same load impedance, no dc voltage, and transfer of the transmission line voltage drop less communication lines, and for this reason dc transmission line voltage regulator has better properties; (4) in dc system without skin effect. Therefore, the entire section of route conductors are using; (5) for the same work, dc voltage potential stress than insulation. Therefore dc Wire need less insulation; (6) dc transmission line loss, corona to little interference lines of communication; (7) HVDC transmission without loss of dielectric, especially in cable transmission; (8) in dc system without stability and synchronization of trouble.A transmission and the second transmission lines terminated in substation or distribution substations, the substation and distribution substations, the equipment including power and instrument transformer and lightning arrester, with circuit breaker, isolating switch, capacitor set, bus and a substation control equipment, with relays for the control room of the equipment. Some of the equipment may include more transformer substations and some less, depending on their role in the operation. Some of the substation is manual and other is automatic. Power distribution system through the distribution substations. Some of them by many large capacity transformer feeders, large area to other minor power transformer capacity, only a near load control, sometimes only a doubly-fed wire feeders (single single variable substation)Now for economic concerns, three-phase three-wire type communication network is widely used, however, the power distribution, four lines using three-phase ac networks.Coal-fired power means of main power generating drive generators, if coal energy is used to produce is pushing the impeller, then generate steam force is called the fire. Use coal produces steam to promote the rotating impeller machine plant called coal-fired power plants. In the combustion process, the energy stored in the coal to heat released,then the energy can be transformed into the form within vapor. Steam into the impeller machine work transformed into electrical energy.Coal-fired power plants could fuel coal, oil and natural gas is. In coal-fired power plant, coal and coal into small pieces first through the break fast, and then put out. The coal conveyer from coal unloader point to crush, then break from coal, coal room to pile and thence to power. In most installations, according to the needs of coal is, Smash the coal storage place, no coal is through the adjustable coal to supply coal, the broken pieces of coal is according to the load changes to control needs. Through the broken into the chamber, the coal dust was in the second wind need enough air to ensure coal burning.In function, impeller machine is used to high temperature and high pressure steam energy into kinetic energy through the rotation, spin and convert electricity generator. Steam through and through a series of impeller machine parts, each of which consists of a set of stable blade, called the pipe mouth parts, even in the rotor blades of mobile Li called. In the mouth parts (channel by tube nozzle, the steam is accelerating formation) to high speed, and the fight in Li kinetic energy is transformed into the shaft. In fact, most of the steam generator is used for air is, there is spread into depression, steam turbine of low-pressure steam from the coagulation turbine, steam into the condenses into water, and finally the condensate water is to implement and circulation.In order to continuous cycle, these must be uninterrupted supply: (1) fuel; (2) the air (oxygen) to the fuel gas burning in the configuration is a must; (3) and condenser, condensed from the condensed water supply, sea and river to lake. Common cooling tower; (4) since water vapour in some places in circulation, will damage process of plenty Clean the supply.The steam power plant auxiliary system is running. For a thermal power plant, the main auxiliary system including water system, burning gas and exhaust systems, condensation system and fuel system. The main auxiliary system running in the water pump, condensation and booster pump, coal-fired power plants in the mill equipment. Other power plant auxiliary equipment including air compressors, water and cooling water system, lighting and heating systems, coal processing system. Auxiliary equipment operation is driven by motor, use some big output by mechanical drive pump and some of the impeller blades, machine drive out from the main use of water vaporimpeller machine. In coal-fired power plant auxiliary equipment, water supply pump and induced draft fan is the biggest need horsepower.Most of the auxiliary power generating unit volume increased significantly in recent years, the reason is required to reduce environment pollution equipment. Air quality control equipment, such as electrostatic precipitator, dust collection of flue gas desulfurization, often used in dust in the new coal-fired power plants, and in many already built in power plant, the natural drive or mechanical drive, fountain, cooling tower in a lake or cooling canal has been applied in coal-fired power plants and plants, where the heat release need to assist cooling system.In coal-fired power stations, some device is used to increase the thermal energy, they are (1) economizer and air preheater, they can reduce the heat loss; (2) water heater, he can increase the temperature of water into boiling water heaters; (3) they can increase and filter the thermal impeller.Coal-fired power plants usually requires a lot of coal and coal reservoirs, however the fuel system in power plant fuel handling equipment is very simple, and almost no fuel oil plants.The gas turbine power plants use gas turbine, where work is burning gas fluid. Although the gas turbine must burn more expensive oil or gas, but their low cost and time is short, and can quickly start, they are very applicable load power plant. The gas turbine burn gas can achieve 538 degrees Celsius in the condensing turbine, however, the temperature is lower, if gas turbine and condenser machine, can produce high thermal efficiency. In gas turbine turbine a combined cycle power plant. The gas through a gas turbine, steam generator heat recovery in there were used to generate vapor heat consumption. Water vapor and then through a heated turbine. Usually a steam turbine, and one to four gas turbine power plant, it must be rated output power.。
(完整版)电力系统外文英语文献资料Electric Power SystemElectrical power system refers to remove power and electric parts of the part,It includes substation, power station and distribution. The role of the power grid is connected power plants and users and with the minimum transmission and distribution network disturbance through transport power, with the highest efficiency and possibility will voltage and frequency of the power transmission to the user fixed .Grid can be divided into several levels based on the operating voltage transmission system, substructure, transmission system and distribution system, the highest level of voltage transmission system is ZhuWangJia or considered the high power grids. From the two aspects of function and operation, power can be roughly divided into two parts, the transmission system and substation. The farthest from the maximum output power and the power of the highest voltage grade usually through line to load. Secondary transmission usually refers to the transmission and distribution system is that part of the middle. If a plant is located in or near the load, it might have no power. It will be direct access to secondary transmission and distribution system. Secondary transmission system voltage grade transmission and distribution system between voltage level. Some systems only single second transmission voltage, but usually more than one. Distribution system is part of the power system and its retail service to users, commercial users and residents of some small industrial users. It is to maintain and in the correct voltage power to users responsible. In most of the system, Distribution system accounts for 35% of the total investment system President to 45%, andtotal loss of system of the half .More than 220kv voltage are usually referred to as Ultra high pressure, over 800kv called high pressure, ultra high voltage and high pressure have important advantages, For example, each route high capacity, reduce the power needed for the number of transmission. In as high voltage to transmission in order to save a conductor material seem desirable, however, must be aware that high voltage transmission can lead to transformer, switch equipment and other instruments of spending increases, so, for the voltage transmission to have certain restriction, allows it to specific circumstances in economic use. Although at present, power transmission most is through the exchange of HVDC transmission, and the growing interest in, mercury arc rectifier and brake flow pipe into the ac power generation and distribution that change for the high voltage dc transmission possible.Compared with the high-voltage dc high-voltage ac transmission has the following some advantages: (1) the communication with high energy; (2) substation of simple maintenance and communication cost is low; (3) ac voltage can easily and effectively raise or lower, it makes the power transmission and high pressure With safety voltage distribution HVDC transmission and high-voltage ac transmission has the following advantages: (1) it only need two phase conductors and ac transmission to three-phase conductors; (2) in the dc transmission impedance, no RongKang, phase shift and impact overvoltage; (3) due to the same load impedance, no dc voltage, and transfer of the transmission line voltage drop less communication lines, and for this reason dc transmission line voltage regulator has better properties; (4) in dc system withoutskin effect. Therefore, the entire section of route conductors are using; (5) for the same work, dc voltage potential stress than insulation. Therefore dc Wire need less insulation; (6) dc transmission line loss, corona to little interference lines of communication; (7) HVDC transmission without loss of dielectric, especially in cable transmission; (8) in dc system without stability and synchronization of trouble.A transmission and the second transmission lines terminated in substation or distribution substations, the substation and distribution substations, the equipment including power and instrument transformer and lightning arrester, with circuit breaker, isolating switch, capacitor set, bus and a substation control equipment, with relays for the control room of the equipment. Some of the equipment may include more transformer substations and some less, depending on their role in the operation. Some of the substation is manual and other is automatic. Power distribution system through the distribution substations. Some of them by many large capacity transformer feeders, large area to other minor power transformer capacity, only a near load control, sometimes only a doubly-fed wire feeders (single single variable substation)Now for economic concerns, three-phase three-wire type communication network is widely used, however, the power distribution, four lines using three-phase ac networks.Coal-fired power means of main power generating drive generators, if coal energy is used to produce is pushing the impeller, then generate steam force is called the fire. Use coal produces steam to promote the rotating impeller machine plant called coal-fired power plants. In the combustion process, the energy stored in the coal to heat released,then the energy can be transformed into the form within vapor. Steam into the impeller machine work transformed into electrical energy.Coal-fired power plants could fuel coal, oil and natural gas is. In coal-fired power plant, coal and coal into small pieces first through the break fast, and then put out. The coal conveyer from coal unloader point to crush, then break from coal, coal room to pile and thence to power. In most installations, according to the needs of coal is, Smash the coal storage place, no coal is through the adjustable coal to supply coal, the broken pieces of coal is according to the load changes to control needs. Through the broken into the chamber, the coal dust was in the second wind need enough air to ensure coal burning.In function, impeller machine is used to high temperature and high pressure steam energy into kinetic energy through the rotation, spin and convert electricity generator. Steam through and through a series of impeller machine parts, each of which consists of a set of stable blade, called the pipe mouth parts, even in the rotor blades of mobile Li called. In the mouth parts (channel by tube nozzle, the steam is accelerating formation) to high speed, and the fight in Li kinetic energy is transformed into the shaft. In fact, most of the steam generator is used for air is, there is spread into depression, steam turbine of low-pressure steam from the coagulation turbine, steam into the condenses into water, and finally the condensate water is to implement and circulation.In order to continuous cycle, these must be uninterrupted supply: (1) fuel; (2) the air (oxygen) to the fuel gas burning in the configuration is a must; (3) and condenser, condensed from the condensed water supply, sea and river to lake. Common coolingtower; (4) since water vapour in some places in circulation, will damage process of plenty Clean the supply.The steam power plant auxiliary system is running. For a thermal power plant, the main auxiliary system including water system, burning gas and exhaust systems, condensation system and fuel system. The main auxiliary system running in the water pump, condensation and booster pump, coal-fired power plants in the mill equipment. Other power plant auxiliary equipment including air compressors, water and cooling water system, lighting and heating systems, coal processing system. Auxiliary equipment operation is driven by motor, use some big output by mechanical drive pump and some of the impeller blades, machine drive out from the main use of water vaporimpeller machine. In coal-fired power plant auxiliary equipment, water supply pump and induced draft fan is the biggest need horsepower.Most of the auxiliary power generating unit volume increased significantly in recent years, the reason is required to reduce environment pollution equipment. Air quality control equipment, such as electrostatic precipitator, dust collection of flue gas desulfurization, often used in dust in the new coal-fired power plants, and in many already built in power plant, the natural drive or mechanical drive, fountain, cooling tower in a lake or cooling canal has been applied in coal-fired power plants and plants, where the heat release need to assist cooling system.In coal-fired power stations, some device is used to increase the thermal energy, they are (1) economizer and air preheater, they can reduce the heat loss; (2) water heater, he can increase the temperature of water into boiling water heaters; (3) they can increase and filter the thermal impeller.Coal-fired power plants usually requires a lot of coal and coal reservoirs, however the fuel system in power plant fuel handling equipment is very simple, and almost no fuel oil plants.The gas turbine power plants use gas turbine, where work is burning gas fluid. Although the gas turbine must burn more expensive oil or gas, but their low cost and time is short, and can quickly start, they are very applicable load power plant. The gas turbine burn gas can achieve 538 degrees Celsius in the condensing turbine, however, the temperature is lower, if gas turbine and condenser machine, can produce high thermal efficiency. In gas turbine turbine a combined cycle power plant. The gas through a gas turbine, steam generator heat recovery in there were used to generate vapor heat consumption. Water vapor and then through a heated turbine. Usually a steam turbine, and one to four gas turbine power plant, it must be rated output power.。
电力系统继电保护外文及翻译编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(电力系统继电保护外文及翻译)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为电力系统继电保护外文及翻译的全部内容。
Power System ProtectionsThe steady—state operation of a power system is frequently disturbed by various faults on electrical equipment. To maintain the proper operation ofthe power system, an effective, efficient and reliable protection scheme is required。
Power system components are designed to operate under normal operating conditions。
However, due to any reason, say a fault, there is an abnormality, it is necessary that there should be a device which senses these abnormal conditions and if so, the element or component where such an abnormality has taken place is removed, i。
电力系统继电保护外文及翻译Power System ProtectionsThe steady-state operation of a power system is frequently disturbed by various faults on electrical equipment. To maintain the proper operation of the power system, an effective, efficient and reliable protection scheme is required. Power system components are designed to operate under normal operating conditions.However, due to any reason, say a fault, there is an abnormality, it is necessary that there should be a device which senses these abnormal conditions and if so, the element or component where such an abnormality has taken place is removed, i.e. deleted from the rest of the system as soon as possible. This is necessary because the power system component can never be designed to withstand the worst possible conditions due to the fact that this will make the whole system highly uneconomical. And therefore, if such an abnormality takes place in any element or component of the power system network, it is desirable that the affected element/component is removed from the rest of the system reliably and quickly in order to restore power in the remaining system under the normal condition as soon as possible.The protection scheme includes both the protective relays and switching circuits, i.e. circuit breakers. The protective relay which functions as a brain is a very important component. The protective relay is a sensing device, which senses the fault, determines its location and then sends command to the proper circuit breaker by closing its trip coil. The circuit breaker after getting command from the protective relay disconnects only the faulted element. this is why the protective relay must be reliable, maintainable and fast in operation.In early days, there used to be electromechanical relay of induction disk-type.However, very soon the disk was replaced by inverted cup, i.e.hollow cylinder and the new relay obtained was known as an induction cup or induction cylinder relay. This relay, which is still in use, possesses several important features such as higher speed; higher torque for a given power input an more uniform torque.However, with the advent of electronic tubes, electronic relays having distinct features were developed during 1940s. With the discovery of solid state components during 1950s, static relays with numerous advantages were developed. The use of digital computers for protective relaying purposes has been engaging the attention of research and practicing engineers since layer 1960s and 1980s. Now, the microprocessor/mini computer-based relaying scheme, because of its numerous advantages such as self –checking feature and flexibility, has been widely used in power system all over the world.The overall system protection is divided into following sections: (i)Generator protection,(ii)Transformer protection,(iii)Bus protection,(iv)Feederprotection,(v)Transmission line protection.Basic Requirements to Protective RelaysAny protection scheme, which i.e. required to safeguard the power system components against abnormal conditions such as faults, consists basically of two elements(i)Protective relay and (ii) Circuit breaker .The protective relay which is primarily the brain behind the whole scheme plays a very important role. Therefore proper care should be taken in selecting an appropriate protective relay which is reliable, efficient and fast in operation. The protective relay must satisfy the following requirements:⑴ since faults on a well designed and healthy system are normally rare, therelays are called upon to operate only occasionally. This means that therelaying scheme is normally idle and must operate whenever fault occurs. Inother words, it must be reliable.⑵ Since the reliability partly depends upon the maintenance, the relay mustbe easily maintainable.⑶ The palpation of the relay can be in two ways. One is the failure to operatein case a fault occurs an second is the relay operation when there is no fault.As a matter of fact, relay must operate if there is a fault and must notoperate if there is no fault.⑷Relaying scheme must be sensitive enough to distinguish between normaland the faulty system.Protective RelaysThe function of the protective relay is to sense the fault and energize the tripcoil of the circuit breaker. The following types of the protective relays are usedfor the apparatus such as synchronous machines, bus bar, transformer and theother apparatus and transmission line protection.(1) Over current relays,(2) Under voltage relays,(3) Under frequency relays,(4) Directional relays,(5) Thermal relays,(6) Phase sequence relays such as(i)negative sequence relays and, (ii)zerosequence relays,(7) Differential relays and percentage differential relays,(8) Distance relays such as (I)plane impedance relays,(ii)angle impedance relay,i.e. Ohm or reactance relays,(iii)angle admittance relays,i.e. Mho relaysand ,(iv)offset and restricted relays,(9)Pilot relays such as (i) wire pilot relays,(ii)carrier channel pilotrelays,(iii)microwave pilot relays. There are different types of the relayingscheme based on construction. They are:(i)electromechanicaltype,(ii)thermal relays,(iii) transduction relays,(iv)rectifier bridgerelay,(v)electronic relays,(vi)digital relaying schemes.电力系统继电保护电力系统的稳态运行经常会因各种电力设备配故障原因而被扰乱。
毕业设计(论文) 外文翻译外文题目: Protection Relay 中文题目:继电保护学院名称:电子与信息工程学院专业:电气工程及其自动化班级:电气082继电保护摘要:继电保护非常重要,因为大部分的用户,是从分布线和分配制度以来,比任何其他部分的系统更容易受到破坏。
回顾我国电力系统继保护技术发展的过程中,概述了微机继电保护技术的成就,提出了未来继电保护技术发展趋势将是:计算机化,电网络化,保护,控制,调查结果显示,数据通信一体化和人工智能化。
关键词:继电保护,继电保护现状发展,继电保护的未来发展一、继电保护原理及现状电力系统的迅速发展对继电保护不断提出新的要求,电子技术,计算机技术的快速发展不断为继电保护技术的发展注入新的活力,因此,继电保护技术是有利的,在40多年的时间里已完成发展了4个历史阶段。
建国后,我国继电保护学科、继电保护设计、继电器制造工业和继电保护技术队伍从无到有,在大约10年的时间里走过了先进国家半个世纪走过的道路。
50年代,我国工程技术人员创造性地吸收、消化、掌握了国外先进的继电保护设备性能和运行技术,建成了一支具有深厚继电保护理论造诣和丰富运行经验的继电保护技术队伍,对全国继电保护技术队伍的建立和成长起了指导作用。
阿城继电器厂引进消化了当时国外先进的继电器制造技术,建立了我国自己的继电器制造业。
因而在60年代中我国已建成了继电保护研究、设计、制造、运行和教学的完整体系。
这是机电式继电保护繁荣的时代,为我国继电保护技术的发展奠定了坚实基础。
自50年代末,晶体管继电保护已在开始研究。
60年代中到80年代中是晶体管继电保护蓬勃发展和广泛采用的时代。
其中天津大学与南京电力自动化设备厂合作研究的500kv晶体管方向高频保护和南京电力自动化研究院研制的晶体管高频闭锁距离保护,运行于葛洲坝50 0 kv线路上,结束了500kv线路保护完全依靠从国外进口的时代。
在此期间,从70年代中,基于集成运算放大器的集成电路保护已开始研究。
中英文对照外文翻译文献(文档含英文原文和中文翻译)POWER SUPPLY AND DISTRIBUTION SYSTEMABSTRACTThe basic function of the electric power system is to transport the electric power towards customers. The l0kV electric distribution net is a key point that connects the power supply with the electricity using on the industry, business and daily-life. For the electric power, allcostumers expect to pay the lowest price for the highest reliability, but don't consider that it's self-contradictory in the co-existence of economy and reliable.To improve the reliability of the power supply network, we must increase the investment cost of the network construction But, if the cost that improve the reliability of the network construction, but the investment on this kind of construction would be worthless if the reducing loss is on the power-off is less than the increasing investment on improving the reliability .Thus we find out a balancepoint to make the most economic,between the investment and the loss by calculating the investment on power net and the loss brought from power-off.KEYWARDS:power supply and distribution,power distribution reliability,reactive compensation,load distributionTEXTThe revolution of electric power system has brought a new big round construction,which is pushing the greater revolution of electric power technique along with the application of new technique and advanced equipment. Especially, the combination of the information technique and electric power technique, to great ex- tent, has improved reliability on electric quality and electric supply. The technical development decreases the cost on electric construction and drives innovation of electric network. On the basis of national and internatio- nal advanced electric knowledge, the dissertation introduces the research hotspot for present electric power sy- etem as following.Firstly, This dissertation introduces the building condition of distribution automation(DA), and brings forward two typical construction modes on DA construction, integrative mode and fission mode .It emphasize the DA structure under the condition of the fission mode and presents the system configuration, the main station scheme, the feeder scheme, the optimized communication scheme etc., which is for DA research reference.Secondly, as for the (DA) trouble measurement, position, isolation and resume, This dissertation analyzes the changes of pressure and current for line problem, gets math equation by educing phase short circuit and problem position under the condition of single-phase and works out equation and several parameter s U& , s I& and e I& table on problem . It brings out optimized isolation and resume plan, realizes auto isolation and network reconstruction, reduces the power off range and time and improves the reliability of electric power supply through problem self- diagnoses and self-analysis. It also introduces software flow and use for problem judgement and sets a model on network reconstruction and computer flow.Thirdly, electricity system state is estimated to be one of the key techniques in DA realization. The dissertation recommends the resolvent of bad measurement data and structure mistake on the ground of describing state estimate way. It also advances a practical test and judging way on topology mistake in state estimate about bad data test and abnormity in state estimate as well as the problem and effect on bad data from state measure to state estimate .As for real time monitor and control problem, the dissertation introduces a new way to solve them by electricity break and exceptional analysis, and the way has been tested in Weifang DA.Fourthly, about the difficulty for building the model of load forecasting, big parameter scatter limit and something concerned, the dissertation introduces some parameters, eg. weather factor, date type and social environment effect based on analysis of routine load forecasting and means. It presents the way for electricity load forecasting founded on neural network(ANN),which has been tested it’s validity by examp le and made to be good practical effect.Fifthly, concerning the lack of concordant wave on preve nting concordant wave and non-power compensation and non-continuity on compensation, there is a topology structure of PWM main circuit and nonpower theory on active filter the waves technique and builds flat proof on the ground of Saber Designer and proves to be practical. Meanwhile, it analyzes and designs the way of non-power need of electric network tre- nds and decreasing line loss combined with DA, which have been tested its objective economic benefit throu- gh counting example.Sixthly, not only do the dissertation design a way founded on the magrginal electric price fitted to our present national electric power market with regards to future trends of electric power market in China and fair trade under the government surveillance, that is group competitio n in short-term trade under the way of grouped price and quantityharmony, but also puts forward combination arithmetic, math model of trading plan and safty economical restriction. It can solve the original contradiction between medium and long term contract price and short term competitive price with improvement on competitive percentage and cut down the unfair income difference of electric factory, at the same time, it can optimize the electric limit for all electric factories and reduce the total purchase charge of electric power from burthen curve of whole electric market network.The distribution network is an important link among the power system. Its neutral grounding mode and operation connects security and stability of the power system directly. At the same time, the problem about neutral grounding is associated with national conditions, natural environment, device fabrication and operation. For example, the activity situation of the thunder and lightning, insulating structure and the peripheral interference will influence the choice of neutral grounding mode Conversely, neutral grounding mode affects design, operation, debugs and developing. Generally in the system higher in grade in the voltage, the insulating expenses account for more sizable proportion at the total price of the equipment. It is very remarkable to bring the economic benefits by reducing the insulating level. Usually such system adopt the neutral directly grounding and adopt the autoreclosing to guarantee power supply reliability. On the contrary, the system which is lower in the voltage adopts neutral none grounding to raise power supply reliability. So it is an important subject to make use of new- type earth device to apply to the distribution network under considering the situation in such factors of various fields as power supply reliability, safety factor, over-voltage factor, the choice of relay protection, investment cost, etc.The main work of this paper is to research and choice the neutral grounding mode of the l0kV distribution network. The neutral grounding mode of the l0kV network mainly adopts none grounding, grounding by arc suppressing coil, grounding by reactance grounding and directly grounding. The best grounding mode is confirmed through the technology comparison. It can help the network run in safety and limit the earth electric arc by using auto-tracking compensate device and using the line protection with the detection of the sensitive small ground current. The paper introduces and analyzes the characteristic of all kind of grounding modes about l0kV network at first. With the comparison with technological and economy, the conclusion is drawn that the improved arc suppressing coil grounding mode shows a very big development potential.Then, this paper researches and introduces some operation characteristics of the arc suppressing coil grounding mode of the l0kV distribution network. And then the paper putemphasis on how to extinguish the earth electric arc effectively by utilizing the resonance principle. This paper combines the development of domestic and international technology and innovative achievement, and introduces the computer earth protection and autotracking compensate device. It proves that the improved arc suppressing coil grounding mode have better operation characteristics in power supply reliability, personal security, security of equipment and interference of communication. The application of the arc suppressing coil grounding mode is also researched in this paper.Finally, the paper summarizes this topic research. As a result of the domination of the arc suppressing coil grounding mode, it should be more popularized and applied in the distribution network in the future.The way of thinking, project and conclusions in this thesis have effect on the research to choose the neutral grounding mode not only in I0kV distribution network but also in other power system..The basic function of the electric power system is to transport the electric power towards customers. The l0kV electric distribution net is a key point that connects the power supply with the electricity using on the industry, business and daily-life. For the electric power, all costumers expect to pay the lowest price for the highest reliability, but don't consider that it's self-contradictory in the co-existence of economy and reliable. To improve the reliability of the power supply network, we must increase the investment cost of the network con- struction But, if the cost that improve the reliability of the network construction, but the investment on this kind of construction would be worthless if the reducing loss is on the power-off is less than the increasing investment on improving the reliability .Thus we find out a balance point to make the most economic, between the investment and the loss by calculating the investment on power net and the loss brought from power-off. The thesis analyses on the economic and the reliable of the various line modes, according to the characteristics various line modes existed in the electric distribution net in foshan..First, the thesis introduces as the different line modes in the l0kV electric distribution net and in some foreign countries. Making it clear tow to conduct analyzing on the line mode of the electric distribution net, and telling us how important and necessary that analyses are.Second, it turns to the necessity of calculating the number of optimization subsection, elaborating how it influences on the economy and reliability. Then by building up the calculation mode of the number of optimization subsection it introduces different power supply projects on the different line modes in brief. Third, it carries on the calculation andanalyses towards the reliability and economy of the different line modes of electric distribution net, describing drafts according by the calculation. Then it makes analysis and discussion on the number of optimization subsection.At last, the article make conclusion on the economy and reliability of different line modes, as well as, its application situation. Accordion to the actual circumstance, the thesis puts forward the beneficial suggestion on the programming and construction of the l0kV electric distribution net in all areas in foshan. Providing the basic theories and beneficial guideline for the programming design of the lOkV electric distribution net and building up a solid net, reasonable layout, qualified safe and efficiently-worked electric distribution net.References[1] Wencheng Su. Factories power supply [M]. Machinery Industry Publishing House. 1999.9[2] Jiecai Liu. Factories power supply design guidance [M]. Machinery Industry Publishing House.1999.12[3] Power supply and distribution system design specifications[S].China plans Press. 1996[4] Low-voltage distribution design specifications [S].China plans Press. 1996.6供配电系统摘要电力系统的基本功能是向用户输送电能。
Protection of Electrical SystemAll electrical systems have the common purpose of providing electrical energy to the utilization equipment as safely and reliably as is economically feasible .The utilization equipment then converts the electrical energy to other forms, such as mechanical, light, and heat energy .The design of the electrical energy to transmit the electrical energy to the utilization equipment must focus on two basic requirements. First, the system must be adequate to deliver to each piece of equipment the necessary energy on a continuous basis under normal conditions. Second, the system must be designed to minimize power outages and damage in the event that abnormal conditions occur on the system. The following is a list of abnormal conditions that can occur on a system and for which corrective action should be taken:1.Overloads2.Short circuits3.Under voltage4.Single phasing of three phase systems5.Over-voltages and transient surges6.Incorrect synchronizing of frequencies7.Incorrect phase sequence8.Reverse power flowNext in order of priorities is the desirability of keeping damage to the electrical equipment to the absolute minimum so that normal operation can resume as quickly as possible .Finally it makes economic sense, especially with large system can continue to operate normally .This requirement for the least amount of shutdown of the system involves coordination of the protective devices.The protective device has two major functions:(1) to detect an abnormal condition on that portion of the system that it is protecting and (2) to automatically and safely disconnect the faulted portion from the balance of the system .Protective devices such as fuses and most low-voltage circuit breakers combine both the detection unit and the disconnecting means in the one unit. Other types of protectivedevices separate the two functions. For example, medium-and high-voltage circuit breakers normally only perform the disconnecting function. They must be used in conjunction with separate protective relays that detect the abnormal conditions and then initiate the tripping of the circuit breaker. It must be emphasized again that protective devices cannot prevent faults from occurring on the system, but can only minimize their effects.Protective devices are rated for the following:1.Maximum continuous voltage: This is the maximum voltage that can be continuously applied to the device without eventually causing the insulation to fail.2.Maximum continuous current: This is the maximum load current that the device can carry continuously without the contacts or other current-carrying parts overheating.3.Interrupting rating: This is the maximum current that the device can safely interrupt at the specified voltage.4.Short-time current ratings:(a)Momentary: This is the maximum rms current that the device can withstand with regard to mechanical stressing. The maximum stressing occur one half-cycle after the fault starts. This rating is necessary to ensure that the device is not physically damaged before it can operate to disconnect the faulted part of the system.(b) Specified time: This is the maximum rms current that the device can withstand for a specified time 0.5% with regard to thermal stressing .In the case of breakers, it is sometimes necessary under severe short circuits to delay their opening for a very short period of time in order to coordinate with other devices .This rating is necessary to ensure that the breaker is not damaged by heat before it can operate to disconnect the faulted part of the system.Protective RelayingProtective relaying is that area of power system design concerned with minimizing service interruption and limiting damage to equipment when failures occur. The function of protective relaying is to cause the prompt removal of adefective element from a power system .The defective element may have a short circuit or it may be operating in an abnormal manner. Protective relaying systems are designed to detect such failures or abnormal conditions quickly (commensurate with system requirements) and to open a minimum of circuit breakers to isolate the defective element. The effect of quick isolate is threefold: (1) it minimizes or prevents damage to the defective element, thus reducing the time and expense of repairs and permitting quicker restoration of the element to service; (2) it minimizes the power system; and (3) it. maximizes the power that can be transferred on power system. The second and third points are of particular significance because they indicate the important role protective relaying plays in assuring maximum service reliability and in system design. The power that can be transmitted across system without the loss of synchronism is the function of fault clearing times. It is apparent that fast fault clearing times permit a higher power transfer than longer clearing times. High-speed clearing of faults can often provide a means for achieving higher power transfers and thereby defer investment in additional transmission facilities.A protective relaying system is based on detecting fault conditions by continuously monitoring the power system variable such as current, voltage, power, frequency, and impedance. Measuring of currents and voltage is performed by instrument transformers of the potential type (PT) or current type (CT). Instrument transformers feed the measured variables to the relay system, which in return, upon detecting a fault, commands circuit breaker (CB) to disconnect the faulted section of the system.An electric relaying system is divided into several protective zones for generators, transformers, buses, transmission and distribution circuits, and motors. The division is such that zones are given adequate protection while keeping service interruption to a minimum. It is to be noted that each zone is overlapped to avoid unprotected (blind) areas. The connections of current transformers achieve the overlapping. The general philosophy of relay application is divide the power system into zones that can be adequately protected by suitable protective equipment and can be disconnected from the power system in a minimum amount of time and with theleast effect on the remainder of the power system. The protective relaying provided for each zone is divided into two categories: (1) primary relaying and (2) backup relaying. Primary relaying is the first line of defense when failures occur, and is connected to trip only the protective relays will operate to trip all of the breakers within that zone. If a breaker is omitted between two adjacent elements, both elements will be disconnected for a failure in either one. This latter arrangement is illustrated by the unit generator-transformer connection in the power plant. On bulk power generating and transmission systems, primary protection is designed to operate at high speed for all faults. Slower protection may be used in less important system areas but, in general, any system area will benefit by the fastest possible primary relaying.If the fault is not cleared by the primary protection, backup relaying operates to clear the fault from the system. In general, backup relaying disconnects a greater portion of the system to isolate the fault. Backup protection is provided for possible failure in the primary both relay backup as well as breaker backup. Ideally, the backup protection should be arranged so that anything that may cause the primary protection to fail will not also cause failure of the backup protection .Moreover, the backup protection must not operate until the primary protection has been given an opportunity to function. As a result, there is time delay associated with any backup operation. When a short circuit occurs, both the primary and the backup protection start to operate. If the primary protection clears the fault, the backup protection will reset without completing its function. If the fault is not cleared by the primary protection, the backup relaying will time out and trip the necessary breakers to clear the fault from the system.There are two forms of backup protection in common use on power system. They are remote backup and local backup.(1)Remote backup. In remote backup relaying, faults are cleared from thesystem one station away from where the failure has occurred.(2)Local backup. In local backup relaying, faults are cleared locally in thesame station where the failure has occurred. For faults on the protectedline, both the primary and the backup relays will operate to preparetripping the line breaker. Relay backup may be just as fast as the front linerelays. When either of these relays operates to initiate tripping of the linebreaker, it also energizes a timer to start the breaker backup function. Ifthe breaker fails to cleat the fault, the line relays will remain picked up,permitting the timer to time out and trip the necessary other breaker onthe associated bus section.Microcomputer-based RelayingA new development in the field of power system protection is the use of computers (usually microcomputers) for relaying. Although computers provide the same protection as that supplied by conventional relays, there are some advantages to the use of computer-based relaying is much greater than for electromechanical devices. Computer-based relaying samples the values of the current, voltage, and other items covered in the protection scheme several times a second, and by use of A/D converters, change these analog values to digital form and then send them to the computer. In the event of a fault, the computer can calculate the fault’s current values and characteristics, and settings can be changed merely by reprogramming. Computer-based relaying are also capable of locating faults, checking features can be built in and sequence of events information can be downloaded to remote computers for fast analysis of relaying operations.Computer-based relaying system consists of subsystems with well defined functions. Although a specific subsystem may be different in some of its details, these subsystems are most likely to be incorporated in its design in some form. The processor is the center of its organization. It is responsible for the execution of relaying programs, maintenance of various timing functions, and communicating with its peripheral equipment. The Random Access Memory (ROM) or Programmable Read Only Memory (PROM) is used to store the programs permanently. In some cases the programs may execute directly from the ROM if its read time is short enough. If this is not the case, the programs must be copied from the ROM into the PAM during an initialization stage, and then the real-time execution would take placefrom the RAM. The Erasable PROM (EPROM) is needed for storing certain parameters (such as the relaying settings) which may be changed from time to time, but once it is set it must remain fixed even if the power supply to the computer is interrupted.The relaying inputs are currents and voltages -- or, to a lesser extent –digital signals indicating contact status. The analog signals must be converted to voltage signals suitable for conversion to digital form. The current and voltage signals obtained from current and volts. The current inputs must be converted to voltages by resistive shunts. As the normal current transformer secondary currents may be as high as hundreds of amperes, shunts of Digital Converter (ADC). An alternative arrangement would be to use an auxiliary current another function; that of providing electrical isolation between the main CT secondary and the computer input system. Since the digital computer can be programmed to perform several functions as long as it has the input and output signals needed for those functions. It is a simple matter to the relaying computer to do many other substation task, for example , measuring and monitoring flows and voltages in transformers and transmission lines, controlling the opening and closing of circuit breakers and switches, providing backup for other devices that have failed, are all functions that can be taken over by the relaying computer. With the program ability and communication capability, the computer-based relaying computer offers yet another possible advantage that is not easily realizable in a conventional system. This is the ability to change the relay characteristics (settings) as the system conditions warrant it. With reasonable prospects of having affordable computer-based relaying which can be dedicated to a single protection function, attention soon turned to the opportunities offered by computer-based relaying to integrate them into a substation, perhaps even a system-wide network. Integrated computer systems for substations which handle relaying, monitoring, and control tasks offer novel opportunities for improving overall system performance.。
电力系统继电保护毕业论文中英文资料外文翻译文献电力系统继电保护论文中英文资料Relayprotectiondevelopmentpresentsituation[Abstract]reviewedourcountryelectricalpowersystemrelayprotectiontechnologicaldevilorpimentprocess,hasoutlinedthemicrocomputerrelayprotectiontechnologyachievement, proposedthefuturerelayprotectiontechnological development tendencywillbe:Computerizes, nnetworked,protects,thecontrol,thesurvey,thedatacommunicationintegrationandtheartificialIintellectualization. [Keyword]relayprotectionpresentsituationdevelopment,relayprotectionsfuturedevelopment1relayprotectiondevelopmentpresentsituationTheelectricalpowersystemrapiddevelopment totherelayprotectionproposedunceasingly thenewrequest,theelectronictechnology, computertechnologyandthecommunication rapiddevelopment unceasingly haspouredintothenewvigorfortherelayprotectiontechnologydevelopment,therefore,therelayprotectiontechnologyisadvantageous, hascompletedthelopment4historical stageinmorethan40yearstime.Afterthefoundingofthenation,ourcountryrelayprotection discipline, therelayprotectionsign,therelaymanufacture industryandtherelayprotection technical teamgrowsoutofnothing,haspassedthroughthepathinabout10yearswhichadvancedcountries halfcenturypassesthrough.The50"s,ourcountryengineers andtechnicians creatively absorption, thedigestion,havegraspedtheoverseasadvancedrelayprotectionequipmentperformanceandthemovementtechnology,completed tohavethedeeprelayprotectiontheoryattainmentsandtherichmovementexperiencerelayprotectiontechnicalteam,andgrewtheinstructionfunctiontothenationalrelayprotectiontechnicalteam"sestablishment. Theachengrelayfactoryintroductionhasdigestedatthattimetheoverseasadvancedrelaymanufacture technology, hasestablishedourcountryrelaymanufacturing industry.Thusourcountryhascompletedtherelayprotectionresearch,thedesign,themanufacture, themovementandtheteachingcompletesysterninthe60"s.Thisisatimewhichthemechanical andelectricalprotection prospers, wasourcountryrelayprotection technology development haslaidthesolidfoundation. Fromtheendofthe50"s,thetransistor relayprotectionstartingtostudy.Inthe60"stothe80"sinarethetimeswhichthetransistor relayprotection vigorousdevelopment andwidelyuses.TianjinUniversity andtheNanjingelectricpowerautomation plantcooperation research500kvtransistor direction highfrequency protection thetransistor highfrequency blocksystemwhichdevelopstheNanjingelectricpowerautomation researchinstitute isawayfromtheprotection, movesontheGezhouDam500kvline,finishedthelineprotection todependuponcompletely fromtheoverseasimporttime.Fromthe70"s,startedbasedontheintegration operational amplifier integrated circuitprotectio ntostudy.Hasformedthecompleteseriestoattheendof80’sintegrated circuitprotection, substitutes forthetransistor protection gradually. Thedevelopment, theproduction, theapplicationtheintegrated circuitprotectswhichtothebeginningofthe90"sstillwereinthedominantposition,thiswastheintegrated circuitprotection time.Theintegrated electricity roadworkfrequencyconversion quantitydirection developswhichinthisaspectNanjingelectricpowerautresearchinstitute highfrequency protected thevitalrole,theTianjinUniversity andtheNanjingelectricpowerautomation plantcooperation development integrated circuitvoltagecompensated thetypedirection highfrequency protection alsomovesinmulti-strip220kvandonthe500kvline.Ourcountrynamelythecomputerrelayprotection researchfromtheendofthe70’s,theinstitutions ofhigherlearningandthescientific researchcourtyardinstituteforerunners funotion.HuazhongUniversity ofScienceandTechnology, southeast theuniversity, theNorthChinaelectricpowerinstitute, theXianJiaotongUniversity, theTianjinUniversity, ShanghaiJiaotongUniversity, theChongqing University andtheNanjingelectricpowerautomation researchinstitute oneafteranotherhasalldeveloped thedifferent principle, thedifferentpatternmicrocomputerprotectivedevice.In1984theoriginalNorthChinaelectricpowerinstitutedevelopedthetransmission linemicrocomputer protectivedevicefirstthroughtheappraisal,inthesystemthefindapplication, hadopenedinourcountryrelayprotectionhistorythenewpage,protectedthepromotionforthemicrocomputerpavetheway.Inthehostequipment protectio naspect,thegenerator whichsoutheast theuniversity andHuazhong University ofScienceandTechnologydevelopslosesmagnetismprotection, thegeneratorprotection andthegenerator?Bankoftransformers protection alsooneafteranotherin1989,in1994throughappraisal, investment movement.TheNanjingelectric powerautomation research institute develops microcomputer lineprotective devicealsoin1991throughappraisal. TheTianjinUniversity andtheNanjingelectricautomationplantcooperation development microcomputer phasevoltagecompensated thetypedirectionhighfrequencyprotection, theXianJiaotongUniversityandtheXuChangrelaycooperation development positivesequencebreakdown component direction highfrequency protection alsooneafteranotherin1993,in1996throughtheappraisal.Heres,thedifferentprinciple,thedifferenttypemicrocomputer lineandthehostequipmentprotectunique,providedonebatchofnewgenerationofperformance fortheelectricalposystemfine,thefunctionhasbeencomplete,theworkreliablerelayprotectioninstallment. Alongwiththemicrocomputer protectivedeviceresearch,inmicrocomputer aspectandonprotection software, algorithm hasalsoyieldedtheverymanytheories result.Maysaystartedourcountryrelayprotection technology fromthe90*senterthetimewhichthemicrocomputerprotected.2relayprotections futuredevelopment Therelayprotectiontechnologyfuturethetendencywillbetocomputerizes,networked,theintellectualization, willprotect,thecontrol,thesurveyandthedatacommunicationintegrationdevelopment.2.1computerizesAlongwiththecomputerhardwareswiftviolentdevelopment, themicrocomputer protectionhardwarealsounceasingly isdeveloping. TheoriginalNorthChinaelectricpowerinstitutedevelopsthemicrocomputer lineprotectionhardwareexperienced 3development phases:Ispublishedfrom8listscpustructuremicrocomputer protection, doesnotdevelopto5yearstimetothemulti-structure, latterdeveloped tothemainlinedoesnotleavethemodulethebigmodularstructure, theperformance enhancesgreatly,obtainedthewidespreadapplication.HuazhongUniversityofScienceandTechnologydevelopsthemicrocomputer protectionalsoisfrom8cpu,developstotakethelaborcontrolling machinepartiallyasthefoundation32microcomputers protection.TheNanjingelectricpowerautomationresearchinstitutefromtheverybeginninghasdeveloped16cputhefoundationmicrocomputer lineprotection, obtainedthebigareapromotion,atpresentalsoisstudying32protections hardwaresystem.Southeasttheuniversitydevelopshemicrocomputer hostequipmentprotectsthehardwarealsopassedthroughimprovedandtheenhancement manytimes.TheTianjinUniversityfromtheverybeginningthedevelopmenttakemorethan16cpuasthefoundationmicrocomputer lineprotection, in1988namelystartedtostudytake32digitalsignalsprocessor(dsp)asthefoundationprotection, thecontrol,thesurveyintegration microcomputer installment, atpresentcooperatedwiththeZhuhaiJinautomaticequipmentcompanydevelopsonekindoffunctioncomplete32bigmodules,amodulewasaminicomputer. Uses32microcomputers chipsonlytofocusbynomeansontheprecision,becauseoftheprecision thea/dswitchresolution limit,issurpassed time16allisacceptswithdifficulty intheconversionrateandthecostaspect;32microcomputers chipshavetheveryhighintegrationratemoreimportantly, veryhighoperatingfrequencyandcomputationspeed,verybigaddressing space,richcommandsystemandmanyinputsoutlet.Thecpuregister,thedatabus,theaddressbusallare32,hasthe。