曲线的参数方程
- 格式:ppt
- 大小:889.00 KB
- 文档页数:27
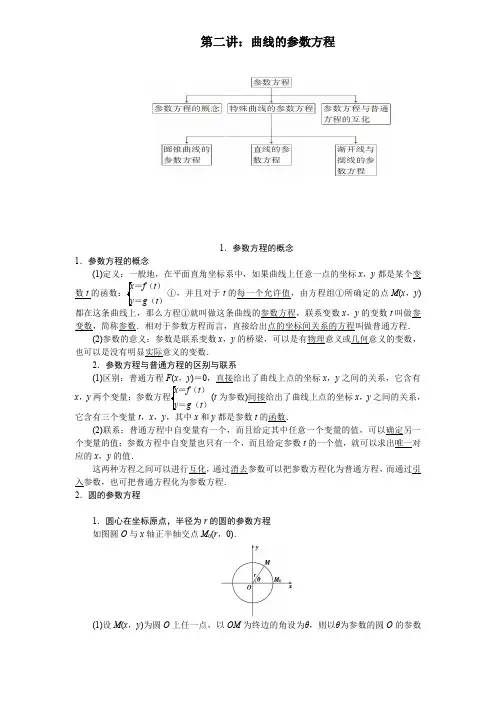
1.第二讲:曲线的参数方程参数方程的概念1.参数方程的概念(1)定义:一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x ,y 都是某个变数t的函数:=f (t )=g (t )①,并且对于t 的每一个允许值,由方程组①所确定的点M (x ,y )都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数x ,y 的变数t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.(2)参数的意义:参数是联系变数x ,y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数.2.参数方程与普通方程的区别与联系(1)区别:普通方程F (x ,y )=0,直接给出了曲线上点的坐标x ,y 之间的关系,它含有x ,y=f (t )=g (t )(t 为参数)间接给出了曲线上点的坐标x ,y 之间的关系,它含有三个变量t ,x ,y ,其中x 和y 都是参数t 的函数.(2)联系:普通方程中自变量有一个,而且给定其中任意一个变量的值,可以确定另一个变量的值;参数方程中自变量也只有一个,而且给定参数t 的一个值,就可以求出唯一对应的x ,y 的值.这两种方程之间可以进行互化,通过消去参数可以把参数方程化为普通方程,而通过引入参数,也可把普通方程化为参数方程.2.圆的参数方程1.圆心在坐标原点,半径为r 的圆的参数方程如图圆O 与x 轴正半轴交点M 0(r ,0).(1)设M (x ,y )为圆O 上任一点,以OM 为终边的角设为θ,则以θ为参数的圆O的参数其中参数θ的几何意义是OM 0绕O 点逆时针旋转到OM 的位置时转过的角度.(2)设动点M 在圆上从M 0点开始逆时针旋转作匀速圆周运动,角速度为ω,则OM 0经过时间t 转过的角θ=ωt ,则以t 为参数的圆O 其中参数t 的物理意义是质点做匀速圆周运动的时间.2.圆心为C (a ,b ),半径为r 的圆的参数方程圆心为(a ,b ),半径为r 的圆的参数方程可以看成将圆心在原点,半径为r 的圆通过坐3.参数方程和普通方程的互化曲线的参数方程和普通方程的互化(1)曲线的参数方程和普通方程是在同一平面直角坐标系中表示曲线的方程的两种不同形式,两种方程是等价的可以互相转化.(2)将曲线的参数方程化为普通方程,有利于识别曲线的类型.参数方程通过消去参数就可得到普通方程.(3)普通方程化参数方程,首先确定变数x ,y 中的一个与参数t 的关系,例如x =f (t ),其次将x =f (t )代入普通方程解出y =g (t )(4)在参数方程与普通方程的互化中,必须使x ,y 的取值范围保持一致.二圆锥曲线的参数方程1.椭圆的参数方程椭圆的参数方程(1)中心在原点,焦点在x 轴上的椭圆x 2a 2+y 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(2)中心在原点,焦点在y 轴上的椭圆y 2a 2+x 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(3)中心在(h ,k )的椭圆普通方程为(x -h )2a 2+(y -k )2b 2=1,则其参数方程为φ是参数).2.双曲线的参数方程和抛物线的参数方程1.双曲线的参数方程(1)中心在原点,焦点在x 轴上的双曲线x 2a 2-y 2b 2=1规定参数φ的取值范围为φ∈[0,2π)且φ≠π2,φ≠3π2.(2)中心在原点,焦点在y 轴上的双曲线y 2a 2-x 2b 2=12.抛物线的参数方程(1)抛物线y 2=2px (2)参数t 的几何意义是抛物线上除顶点外的任意一点与原点连线的斜率的倒数.三直线的参数方程1.直线的参数方程经过点M 0(x 0,y 0),倾斜角为α的直线l t 为参数).2.直线的参数方程中参数t 的几何意义(1)参数t 的绝对值表示参数t 所对应的点M 到定点M 0的距离.(2)当M 0M →与e (直线的单位方向向量)同向时,t 取正数.当M 0M →与e 反向时,t 取负数,当M 与M 0重合时,t =0.3.直线参数方程的其他形式对于同一条直线的普通方程,选取的参数不同,会得到不同的参数方程.我们把过点M 0(x 0,y 0),倾斜角为α的直线,选取参数t =M 0M =x 0+t cos α=y 0+t sin α(t 为参数)称为直线参数方程的标准形式,此时的参数t 有明确的几何意义.一般地,过点M 0(x 0,y 0),斜率k =ba (a ,b 为常数)=x 0+at =y 0+bt(t 为参数),称为直线参数方程的一般形式,此时的参数t 不具有标准式中参数的几何意义.四渐开线与摆线(了解)1.渐开线的概念及参数方程(1)渐开线的产生过程及定义把一条没有弹性的细绳绕在一个圆盘上,在绳的外端系上一支铅笔,将绳子拉紧,保持绳子与圆相切,逐渐展开,铅笔画出的曲线叫做圆的渐开线,相应的定圆叫做渐开线的基圆.(2)圆的渐开线的参数方程以基圆圆心O 为原点,直线OA 为x 轴,建立如图所示的平面直角坐标系.设基圆的半径为r ,绳子外端M 的坐标为(x ,y )φ是参数).这就是圆的渐开线的参数方程.2.摆线的概念及参数方程(1)摆线的产生过程及定义平面内,一个动圆沿着一条定直线无滑动地滚动时圆周上一个固定点所经过的轨迹,叫做平摆线,简称摆线,又叫旋轮线.(2)半径为r的圆所产生摆线的参数方程为φ是参数).。
曲线的参数方程教学目标:1. 了解参数方程的定义和特点;2. 学会将直角坐标系下的曲线转换为参数方程;3. 能够利用参数方程分析和解决实际问题。
教学内容:第一章:参数方程的基本概念1.1 参数方程的定义1.2 参数方程的特点1.3 参数方程与直角坐标方程的关系第二章:曲线的参数方程转换2.1 圆的参数方程2.2 椭圆的参数方程2.3 双曲线的参数方程2.4 抛物线的参数方程第三章:参数方程的应用3.1 直线运动的参数方程3.2 曲线运动的参数方程3.3 几何图形的参数方程第四章:参数方程的解法4.1 参数方程的求解方法4.2 参数方程的图像分析4.3 参数方程的优化问题第五章:参数方程的实际应用5.1 参数方程在工程中的应用5.2 参数方程在物理中的应用5.3 参数方程在其他领域的应用教学方法:1. 采用讲授法,讲解参数方程的基本概念和转换方法;2. 利用数形结合法,分析参数方程的图像特点;3. 结合实例,讲解参数方程在实际中的应用;4. 引导学生进行练习和思考,巩固所学知识。
教学评价:1. 课堂问答:检查学生对参数方程基本概念的理解;2. 课堂练习:考察学生对参数方程转换方法的掌握;3. 课后作业:评估学生对参数方程应用的熟练程度;4. 小组讨论:评价学生在团队合作中解决问题的能力。
教学资源:1. 教材或教学参考书;2. 投影仪或白板;3. 数学软件或图形计算器;4. 实例素材和练习题。
教学步骤:第一章:参数方程的基本概念1.1 引入参数方程的概念,解释参数方程的定义;1.2 分析参数方程的特点,与直角坐标方程进行对比;1.3 引导学生思考参数方程的应用场景。
第二章:曲线的参数方程转换2.1 讲解圆的参数方程,展示圆的图像;2.2 引导学生推导椭圆的参数方程,展示椭圆的图像;2.3 讲解双曲线的参数方程,展示双曲线的图像;2.4 讲解抛物线的参数方程,展示抛物线的图像。
第三章:参数方程的应用3.1 分析直线运动的参数方程,举例说明;3.2 分析曲线运动的参数方程,举例说明;3.3 引导学生思考几何图形的参数方程应用。


2.2 常见曲线的参数方程 第一节 圆锥曲线的参数方程一椭圆的参数方程1、中心在坐标原点,焦点在x 轴上,标准方程是22221(0)x y a b a b+=>>的椭圆的参数方程为cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)同样,中心在坐标原点,焦点在y 轴上,标准方程是22221(0)y x a b a b+=>>的椭圆的参数方程为cos (sin x b y a ϕϕϕ=⎧⎨=⎩为参数)2、椭圆参数方程的推导如图,以原点O 为圆心,,()a b a b o >>为半径分别作两个同心圆,设A 为大圆上的任一点,连接OA ,与小圆交于点B ,过点,A B 分别作x 轴,y 轴的垂线,两垂线交于点M 。
设以Ox 为始边,OA 为终边的角为ϕ,点M 的坐标是(,)x y 。
那么点A 的横坐标为x ,点B 的纵坐标为y 。
由于点,A B 都在角ϕ的终边上,由三角函数的定义有cos cos ,sin sin x OA a y OB b ϕϕϕϕ==== 3当半径OA 绕点O 旋转一周时,就得到了点M 的轨迹,它的参数方程是cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)这是中心在原点O ,焦点在x 轴上的椭圆的参数方程。
3、椭圆的参数方程中参数ϕ的意义 圆的参数方程cos (sin x r y r θθθ=⎧⎨=⎩为参数)中的参数θ是动点(,)M x y 的旋转角,但在椭圆的参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数)中的参数ϕ不是动点(,)M x y 的旋转角,它是动点(,)M x y 所对应的圆的半径OA (或OB )的旋转角,称为点M 的离心角,不是OM 的旋转角,通常规定[)0,2ϕπ∈ 4、椭圆参数方程与普通方程的互化可以借助同角三角函数的平方关系将普通方程和参数方程互化。
①由椭圆的参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数,0)a b >>,易得cos ,sin x ya b ϕϕ==,可以利用平方关系将参数方程中的参数ϕ化去得到普通方程22221(0)x y a b a b+=>>②在椭圆的普通方程22221(0)x y a b a b +=>>中,令cos ,sin x ya bϕϕ==,从而将普通方程化为参数方程cos (sin x a y b ϕϕϕ=⎧⎨=⎩为参数,0)a b >>注:①椭圆中参数的取值范围:由普通方程可知椭圆的范围是:,a x a b y b -≤≤-≤≤,结合三角函数的有界性可知参数[)0,2ϕπ∈②对于不同的参数,椭圆的参数方程也有不同的呈现形式。
曲线化为参数方程
曲线是二维平面上的图形,由无数个点组成。
为了能够更方便地描述和计算曲线,我们可以将其转化为参数方程的形式。
具体而言,我们可以选取一个自变量t(通常为时间),然后将曲线上每个点的坐标表示成x=f(t)和y=g(t)的形式。
这样,曲线上的每一个点就对应一个(t, f(t), g(t))的三元组,从而曲线就被表示为参数方程:
x = f(t)
y = g(t)
参数方程的好处在于它能够更清晰地描述曲线的形态,尤其是对于那些难以用一般函数公式表示的曲线(比如心形线、螺旋线等),参数方程可以轻松地表示出它们的形状。
此外,参数方程也有很多应用,比如在物理学中用于描述粒子的运动轨迹,在计算机图形学中用于绘制曲线和动画等。
- 1 -。
常见的参数方程常见的参数方程参数方程是一种描述曲线的方式,它是用参数t来表示曲线上的点坐标。
在二维平面中,一个曲线可以用两个参数x和y来表示,即(x(t),y(t))。
在三维空间中,一个曲线可以用三个参数x、y和z来表示,即(x(t), y(t), z(t))。
一、直线的参数方程直线是最简单的曲线之一,它可以用两个点来确定。
假设有两个点P1(x1, y1)和P2(x2, y2),那么这条直线的参数方程可以表示为:x = x1 + (x2 - x1)ty = y1 + (y2 - y1)t其中t是一个实数,取值范围为0到1。
当t=0时,对应的点为P1;当t=1时,对应的点为P2。
二、圆的参数方程圆是一个非常重要且常见的几何图形,在计算机图形学中也经常使用。
一个半径为r、圆心坐标为(a, b)的圆可以用以下参数方程表示:x = a + rcos(t)y = b + rsin(t)其中t是一个实数,取值范围为0到2π。
当t=0时,对应圆上最右边的点;当t=π/2时,对应圆上最上面的点;当t=π时,对应圆上最左边的点;当t=3π/2时,对应圆上最下面的点。
三、椭圆的参数方程椭圆是一个比较复杂的曲线,它可以用以下参数方程表示:x = a cos(t)y = b sin(t)其中a和b分别是椭圆在x轴和y轴方向上的半径。
当a=b时,这个椭圆就变成了一个圆。
四、抛物线的参数方程抛物线是一个非常重要且常见的曲线,在物理学和工程学中经常使用。
一个开口朝上或开口朝下的抛物线可以用以下参数方程表示:x = at^2y = bt其中a和b是常数,控制着抛物线在x轴和y轴方向上的形状。
当a>0时,抛物线开口朝上;当a<0时,抛物线开口朝下。
五、双曲线的参数方程双曲线是一个非常特殊且复杂的曲线,在数学中有着广泛的应用。
一个双曲线可以用以下参数方程表示:x = a sec(t)y = b tan(t)其中a和b是常数,控制着双曲线在x轴和y轴方向上的形状。
曲线的一般方程化为参数方程曲线是数学中的重要概念之一,我们可以通过数学公式来表达曲线的形式。
一般来说,曲线的方程可分为两种形式:一种是直角坐标系下的方程,另一种则是参数方程。
本文将为大家介绍如何将曲线的一般方程化为参数方程。
一、什么是参数方程参数方程又叫向量函数,是用向量的方式来描述直线、曲线或曲面的方程。
参数方程通常表示为:x = f(t)y = g(t)其中,x、y表示坐标,t表示参数。
通过不断改变参数t的值,我们可以得到一些点的坐标值,进而组成曲线或者图形。
二、曲线的一般方程假设我们有一条曲线,它的一般方程形式为:f(x, y) = 0其中,f表示一个函数,x、y则是曲线上的点的坐标。
一般方程最常见的例子便是圆的一般方程:x^2 + y^2 = r^2其中,r为圆的半径。
如果想将这个方程式化为参数方程,我们需要进行以下步骤:1. 通过任意曲线上的一个点P(x,y),假设P在纵坐标上,即y≠0。
现在我们将P点移动到原点O,即平移(-x, -y)。
2. 在新的坐标系下,求出曲线上一点(x1, y1)和原点O的连线与x轴正方向的夹角θ。
这里我们可以通过三角函数求出:θ = arctan(y1 / x1)3. 我们可以将曲线分为若干小部分,每一部分的长为ds,曲线上的点距离P点的距离为s。
4. 我们假设P点到曲线上的每一个点的距离为t,即t = s = ∫ds5. 最后,我们得到的参数方程为:x = tcos(θ) + xy = tsin(θ) + y至此,我们已经将曲线的一般方程化为了参数方程。
在实际的应用中,参数方程可以更加灵活地展现出曲线的形态,为我们的研究提供更多的参考。
总结:本文介绍了如何将曲线的一般方程化为参数方程,主要包括寻找曲线上的一点,求出曲线上任意一点和原点的夹角以及计算曲线长度的几个步骤。
通过这些步骤,我们可以将曲线更加方便地描述出来,并展现出更加精美的形式。
第一类曲线积分的三种计算方式1.参数方程法参数方程法是最常用的计算第一类曲线积分的方法之一、它利用参数方程将曲线分成若干小段,然后计算每一小段上的积分,最后将所有小段上的积分相加得到整个曲线上的积分值。
具体步骤如下:1.将曲线的参数方程表示为x=f(t),y=g(t),z=h(t),其中t的取值范围为[a,b]。
2.求出曲线的切线向量T(t)和曲率向量K(t)。
3.将向量场F(x,y,z)表示为F(x,y,z)=P(x,y,z)i+Q(x,y,z)j+R(x,y,z)k。
4. 计算曲线段的长度ds=sqrt(dx^2+dy^2+dz^2),其中dx=f'(t)dt,dy=g'(t)dt,dz=h'(t)dt。
5.将向量场在曲线上的投影F·T计算出来。
6. 将F·T乘以ds,再积分得到曲线上的积分。
参数方程法的优点是适用于任意形状的曲线,缺点是当曲线的参数方程比较复杂时,计算较为繁琐。
2.向量场法向量场法是计算第一类曲线积分的另一种常见方法。
它直接利用向量场在曲线上的投影与曲线段的长度相乘然后积分,而无需转化为参数方程。
具体步骤如下:1.将向量场F(x,y,z)表示为F(x,y,z)=P(x,y,z)i+Q(x,y,z)j+R(x,y,z)k。
2.将曲线表示为r(t)=x(t)i+y(t)j+z(t)k,其中t的取值范围为[a,b]。
3. 计算向量场在曲线上的投影F·dr,其中dr=dx i+dy j+dz k,dx=x'(t)dt,dy=y'(t)dt,dz=z'(t)dt。
4. 将F·dr积分得到曲线上的积分。
向量场法的优点是计算较为简单直接,而无需转化为参数方程,缺点是不适用于复杂的曲线形状。
3.微积分基本定理法微积分基本定理法是计算第一类曲线积分的另一个重要方法。
它利用微积分基本定理将曲线积分转化为定积分,从而简化计算过程。
17 参数方程知识梳理1.曲线的参数方程在平面直角坐标系xOy 中,如果曲线上任意一点的坐标x ,y 都是某个变数t 的函数⎩⎪⎨⎪⎧x =f (t ),y =g (t ).并且对于t 的每一个允许值,由上述方程组所确定的点M (x ,y )都在这条曲线上,则该方程叫做这条曲线的参数方程,其中变数t 称为参数.2.一些常见曲线的参数方程(1)过点P 0(x 0,y 0),且倾斜角为α的直线的参数方程为⎩⎪⎨⎪⎧x =x 0+t cos αy =y 0+t sin α(t 为参数).(2)圆的方程(x -a )2+(y -b )2=r 2的参数方程为⎩⎪⎨⎪⎧x =a +r cos θy =b +r sin θ(θ为参数). (3)椭圆方程x 2a 2+y 2b2=1(a >b >0)的参数方程为⎩⎪⎨⎪⎧x =a cos θy =b sin θ(θ为参数). (4)抛物线方程y 2=2px (p >0)的参数方程为⎩⎪⎨⎪⎧x =2pt 2y =2pt(t 为参数). 要点整合1.极坐标方程与参数方程互化时,以普通方程(直角坐标方程)为联系达到相互转化. 2.在利用参数方程求解具体问题时,注意参数的几何意义和范围. 3.数形结合思想是求有关参数方程的最值问题的高效方法.题型一.参数方程化为普通方程(或极坐标方程)例1.已知曲线C 1的参数方程为⎩⎪⎨⎪⎧x =4+5cos t ,y =5+5sin t (t 为参数),以坐标原点为极点,x 轴的正半轴为极轴建立极坐标系,曲线C 2的极坐标方程为ρ=2sin θ.(1)把C 1的参数方程化为极坐标方程;(2)求C 1与C 2交点的极坐标(ρ≥0,0≤θ<2π).[解] (1)将⎩⎪⎨⎪⎧x =4+5cos t ,y =5+5sin t消去参数t ,化为普通方程(x -4)2+(y -5)2=25,即C 1:x 2+y 2-8x -10y +16=0.将⎩⎪⎨⎪⎧x =ρcos θy =ρsin θ,代入x 2+y 2-8x -10y +16=0,得ρ2-8ρcos θ-10ρsin θ+16=0. 所以C 1的极坐标方程为ρ2-8ρcos θ-10ρsin θ+16=0. (2)C 2的普通方程为x 2+y 2-2y =0.由⎩⎪⎨⎪⎧x 2+y 2-8x -10y +16=0,x 2+y 2-2y =0, 解得⎩⎪⎨⎪⎧x =1,y =1或⎩⎪⎨⎪⎧x =0,y =2. 所以C 1与C 2交点的极坐标分别为⎝⎛⎭⎫2,π4,⎝⎛⎭⎫2,π2.消去参数的三种方法(1)利用解方程的技巧求出参数的表达式,然后代入消去参数; (2)利用三角恒等式消去参数;(3)根据参数方程本身的结构特征,选用一些灵活的方法从整体上消去参数.变式:在直角坐标系xOy 中,圆C 的参数方程为⎩⎪⎨⎪⎧x =1+cos φ,y =sin φ(φ为参数).以坐标原点为极点,x 轴的正半轴为极轴建立极坐标系.(1)求圆C 的极坐标方程;(2)直线l 的极坐标方程是2ρsin ⎝⎛⎭⎫θ+π3=33,射线OM :θ=π3与圆C 的交点为O ,P ,与直线l 的交点为Q ,求线段PQ 的长.解:(1)圆C 的普通方程为(x -1)2+y 2=1, 又x =ρcos θ,y =ρsin θ,所以圆C 的极坐标方程为ρ=2cos θ.(2)设P (ρ1,θ1),则由⎩⎪⎨⎪⎧ρ1=2cos θ1,θ1=π3,得ρ1=1,θ1=π3,设Q (ρ2,θ2),则由⎩⎨⎧2ρ2sin ⎝⎛⎭⎫θ2+π3=33,θ2=π3,得ρ2=3,θ2=π3,由于θ1=θ2,所以|PQ |=|ρ1-ρ2|=2.题型二.直线的参数方程中参数几何意义的应用例2.在直角坐标系中,以原点为极点,x 轴的正半轴为极轴建立极坐标系,已知曲线C :ρsin 2θ=2a cos θ(a >0),过点P (-2,-4)的直线l :⎩⎨⎧x =-2+22t y =-4+22t(t 为参数)与曲线C 相交于M ,N 两点.(1)求曲线C 的直角坐标方程和直线l 的普通方程; (2)若|PM |,|MN |,|PN |成等比数列,求实数a 的值.[解] (1)把⎩⎪⎨⎪⎧x =ρcos θy =ρsin θ代入ρsin 2θ=2a cos θ,得y 2=2ax (a >0),由⎩⎨⎧x =-2+22ty =-4+22t (t 为参数),消去t 得x -y -2=0,∴曲线C 的直角坐标方程和直线l的普通方程分别是y 2=2ax (a >0),x -y -2=0.(2)将⎩⎨⎧x =-2+22t y =-4+22t(t 为参数)代入y 2=2ax ,整理得t 2-22(4+a )t +8(4+a )=0. 设t 1,t 2是该方程的两根,则t 1+t 2=22(4+a ),t 1·t 2=8(4+a ), ∵|MN |2=|PM |·|PN |,∴(t 1-t 2)2=(t 1+t 2)2-4t 1·t 2=t 1·t 2, ∴8(4+a )2-4×8(4+a )=8(4+a ), ∴a =1.根据直线的参数方程的标准式中t 的几何意义,有如下常用结论:过定点M 0的直线与圆锥曲线相交,交点为M 1,M 2,所对应的参数分别为t 1,t 2. ①弦长|M 1M 2|=|t 1-t 2|=(t 1+t 2)2-4t 1t 2; ②弦M 1M 2的中点⇔t 1+t 2=0; ③|M 0M 1||M 0M 2|=|t 1t 2|; ④1|M 0M 1|+1|M 0M 2|=|t 1|+|t 2||t 1t 2|. 其中:|t 1|+|t 2|=(|t 1|+|t 2|)2 =(t 1+t 2)2-2t 1t 2+2|t 1t 2|.变式:已知直线l :⎩⎨⎧x =5+32t ,y =3+12t (t 为参数).以坐标原点为极点,x 轴的正半轴为极轴建立极坐标系,曲线C 的极坐标方程为ρ=2cos θ.(1)将曲线C 的极坐标方程化为直角坐标方程;(2)设点M 的直角坐标为(5,3),直线l 与曲线C 的交点为A ,B ,求|MA |·|MB |的值与|AB |.解:(1)ρ=2cos θ等价于ρ2=2ρcos θ.①将ρ2=x 2+y 2,ρcos θ=x 代入①即得曲线C 的直角坐标方程为x 2+y 2-2x =0.②(2)将⎩⎨⎧x =5+32t ,y =3+12t代入②,得t 2+53t +18=0,设这个方程的两个实根分别为t 1,t 2,则t 1+t 2=-53,t 1t 2=18.所以|MA |·|MB |=|t 1t 2|=18, |AB |=|t 1-t 2|=(t 1+t 2)2-4t 1t 2 =(-53)2-4×18=3, 所以|MA |·|MB |=18,|AB |= 3.题型三.极坐标方程与参数方程的综合应用例3.(2016·高考全国卷丙)在直角坐标系xOy 中,曲线C 1的参数方程为⎩⎨⎧x =3cos αy =sin α(α为参数).以坐标原点为极点,以x 轴的正半轴为极轴,建立极坐标系,曲线C 2的极坐标方程为ρsin ⎝⎛⎭⎫θ+π4=2 2.(1)写出C 1的普通方程和C 2的直角坐标方程;(2)设点P 在C 1上,点Q 在C 2上,求|PQ |的最小值及此时点P 的直角坐标. [解] (1)C 1的普通方程为x 23+y 2=1,C 2的直角坐标方程为x +y -4=0.(2)由题意,可设点P 的直角坐标为()3cos α,sin α.因为C 2是直线,所以|PQ |的最小值即为P 到C 2的距离d (α)的最小值,d (α)=||3cos α+sin α-42=2⎪⎪⎪⎪sin ⎝⎛⎭⎫α+π3-2.当且仅当α=2k π+π6(k ∈Z )时,d (α)取得最小值,最小值为2,此时点P 的直角坐标为⎝⎛⎭⎫32,12.求参数方程中最值问题的三个策略(1)曲线方程上的点用参数方程表示;直线用普通方程表示;利用相关距离公式将目标转化为求以参数为变量的函数的最值;(2)当曲线是圆时,数形结合更快捷方便;(3)利用直线参数方程中参数的几何意义时,需特别注意方向性.变式: 以直角坐标原点为极点,x 轴的正半轴为极轴建立极坐标系.点M 的极坐标为(5,θ),且tan θ=12,θ∈⎝⎛⎭⎫0,π2,椭圆C :x 216+y 24=1.(1)求点M 的直角坐标与曲线C 的参数方程;(2)过点M 的直线l 与椭圆C 交于A 、B 两点,且M 为线段AB 的中点,P 是C 上的一个动点,求△P AB 面积的最大值.解:(1)由tan θ=12,θ∈⎝⎛⎭⎫0,π2得cos θ=255,sin θ=55,又ρ=5,∴x =ρcos θ=2,y =ρsin θ=1,∴点M 的直角坐标为(2,1).将a =4,b =2代入⎩⎪⎨⎪⎧x =a cos βy =b sin β可得椭圆C 的参数方程为⎩⎪⎨⎪⎧x =4cos βy =2sin β(β为参数). (2)设A (x 1,y 1),B (x 2,y 2),则⎩⎨⎧x 2116+y 214=1x 2216+y 224=1,相减得(x 1+x 2)(x 1-x 2)16+(y 1+y 2)(y 1-y 2)4=0.∵M (2,1)为AB 中点,∴x 1+x 2=4,y 1+y 2=2,代入上式可得y 1-y 2x 1-x 2=-12,即直线l 的斜率k =-12.∴直线l 的普通方程为y =-12x +2.由⎩⎨⎧y =-12x +2x 216+y 24=1,解得A (0,2),B (4,0),∴|AB |=25, 过椭圆C 上的动点P 作直线l 1∥l ,则当l 1与椭圆C 相切时可求点P 到直线l 的最大值. 设l 1的方程为:y =-12x +m ,代入x 216+y 24=1整理得2x 2-4mx +4m 2-16=0,由Δ=16m 2-8(4m 2-16)=0,解得m =±2 2.显然当m =-22,P (-22,-2)时,点P 到直线l 距离最大为d =4(2+1)5,从而(S △P AB )最大=12|AB |·d =12×25×4(2+1)5=4(2+1).【真题演练】1.在直角坐标系x O y 中,曲线C 的参数方程为⎩⎨⎧==θθsin cos 3y x (θ为参数),直线l 的参数方程为⎩⎨⎧-=+=ty ta x 14(t 为参数). (1)若a =-1,求C 与l 的交点坐标; (2)若C 上的点到l 距离的最大值为17,求a .解:(1)曲线C 的参数方程为⎩⎨⎧==θθsin cos 3y x (θ为参数),化为标准方程是:1922=+y x ; a =-1时,直线l 的参数方程化为一般方程是:x +4y -3=0;联立方程⎪⎩⎪⎨⎧=-+=+0341922y x y x , 解得⎩⎨⎧==03y x 或⎪⎪⎩⎪⎪⎨⎧=-=25242521y x ,所以椭圆C 和直线l 的交点为(3,0)和)2524,2521(-.(2)l 的参数方程⎩⎨⎧-=+=ty ta x 14(t 为参数)化为一般方程是:x +4y -a -4=0,椭圆C 上的任一点P 可以表示成P (3cos θ,sin θ),θ∈[0,2π), 所以点P 到直线l 的距离d 为: d =17=17,φ满足tan φ=43, 又d 的最大值d max =17,所以|5sin (θ+φ)-a -4|的最大值为17, 得:5-a -4=17或-5-a -4=-17, 即a =-16或a =8.2.在直角坐标系x O y 中,以坐标原点为极点,x 轴的正半轴为极轴建立极坐标系,曲线C 1的极坐标方程为ρcos θ=4.(1)M 为曲线C 1上的动点,点P 在线段OM 上,且满足|OM|•|OP|=16,求点P 的轨迹C 2的直角坐标方程;(2)设点A 的极坐标为),(32π,点B 在曲线C 2上,求△OAB 面积的最大值答案:解:(1)曲线C 1的直角坐标方程为:x =4, 设P (x ,y ),M (4,y 0),则x 4=y y 0,∴y 0=4yx ,∵|OM||OP|=16,∴ x 2+y 2 02=16, 即(x 2+y 2)(1+y 2x )=16,∴x 4+2x 2y 2+y 4=16x 2,即(x 2+y 2)2=16x 2,两边开方得:x 2+y 2=4x ,整理得:(x -2)2+y 2=4(x ≠0),∴点P 的轨迹C 2的直角坐标方程:(x -2)2+y 2=4(x ≠0).(2)点A 的直角坐标为A (1, ,显然点A 在曲线C 2上,|OA|=2, ∴曲线C 2的圆心(2,0)到弦OA 的距离d = 4−1= 3, ∴△AOB 的最大面积S=12|OA|•(2+ 3)=2+ 3.3.在直角坐标系x O y 中,直线l 1的参数方程为⎩⎨⎧=+=kty tx 2,(t 为参数),直线l 2的参数方程为⎪⎩⎪⎨⎧=+-=k m y m x 2,(m 为参数).设l 1与l 2的交点为P ,当k 变化时,P 的轨迹为曲线C . (1)写出C 的普通方程;(2)以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,设l 3:02)sin (cos =-+θθρ,M 为l 3与C 的交点,求M 的极径.答案:解:(1)∵直线l 1的参数方程为 y =kt x =2+t,(t 为参数), ∴消掉参数t 得:直线l 1的普通方程为:y =k (x -2)①; 又直线l 2的参数方程为 y =m kx =−2+m,(m 为参数),同理可得,直线l 2的普通方程为:x =-2+ky ②;联立①②,消去k 得:x 2-y 2=4,即C 的普通方程为x 2-y 2=4; (2)∵l 3的极坐标方程为ρ(cos θ+sin θ)- 2=0, ∴其普通方程为:x +y - ,联立 x 2−y 2=4x +y = 2得: y =− 22x =3 2,∴ρ2=x 2+y 2=184+24=5.∴l 3与C 的交点M 的极径为ρ= 5.。