自控第三章答案
- 格式:ppt
- 大小:184.50 KB
- 文档页数:22

3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。

3-1 解 该线圈的微分方程为 u =+diiR L dt对上式两边取拉氏变换,并令初始条件为零,可得传递函数为()1=()(+)+1I s RU s L R 时间常数+0.005T L R s ==,过渡时间=30.015s t T s =。
3-2 解 如图2-3-2所示系统的闭环传递函数为010()=(s)0.2+1+10+1H K C s KR S K Ts =其中0101+10H K K K =,0.21+10HT K =原系统的时间常数为0.2s ,放大系数为10,为了满足题目的要求,令0.02T s =和10K =,有0.9H K =和010K =。
3-3 解 设为温度计的输入,表示实际水温,设为温度计的输出,表示温度计的指示值,若实际水温为R (常值),则输入为幅值为R 的阶跃函数,输出为(t)=R(1-e )T c τ根据所给条件,有则时间常数。
3-4 解:所给传递函数的闭环极点为21,2=-1-n n s j ζωωζ±根据上式表达式,可以确定图2-3-3中的阴影部分为闭环极点可能位于的区域(考虑到对称性,只绘出s 平面的上半平面)。
图2-3-3 闭环极点可能位于的区域3-5解:典型二阶系统的传递函数为由如图2-3-4所示的响应曲线,可知峰值时间,超调量,根据二阶系统的性能指标计算公式和可以确定和,根据如图2-3-4所示曲线的终值,可以确定。
3-6 解:如图2-3-5所示系统的传递函数为是一个典型的二阶系统,其自然振荡频率为,令阻尼比可以确定,性能指标及分别为3-7 解:系统为典型二阶系统,自然振荡频率,阻尼比。
单位阶跃响应的表达式为(t>0)单位斜坡响应的表达式为3-8 解:当时,系统的闭环传递函数为其中,无阻尼自然振荡频率,阻尼比,单位阶跃响应的超调量峰值时间和过度过程时间分别为16.3%、0,36s和0.7s当,时系统的闭环传递函数为其中,无阻尼自然振荡频率,阻尼比,单位阶跃响应的超调量、峰值时间和过渡过程时间分别为30.9%、0.24s和0.7s。
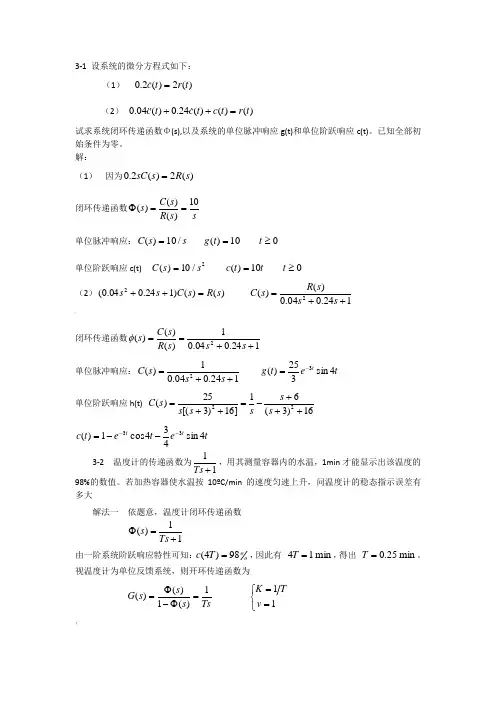
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C `闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK !用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T sTs Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 203-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。

作业3-11,3-12,3-15.。
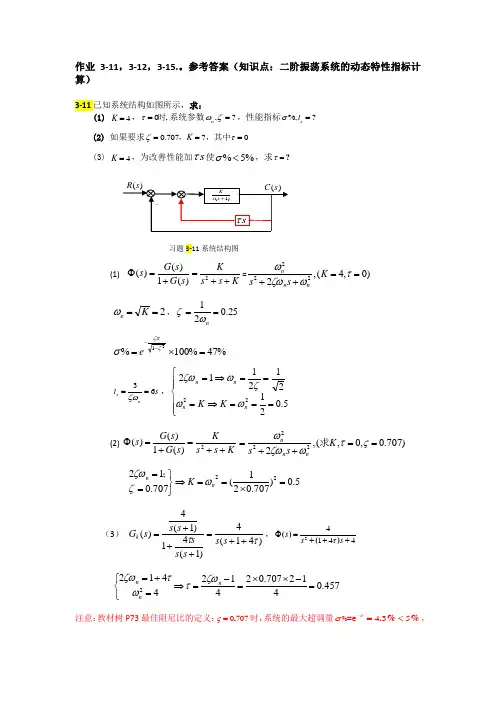
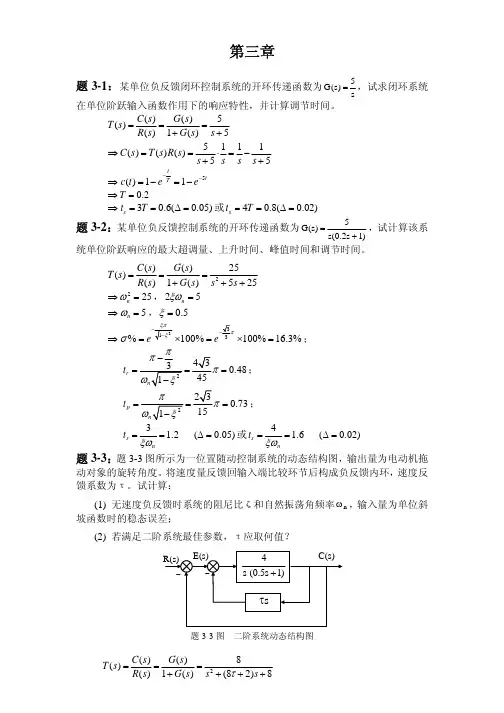
参考答案(知识点:二阶振荡系统的动态特性指标计算)3-11已知系统结构如图所示,求:(1) 4K =,0,τ=时系统参数,?n ωζ=,性能指标%,?s t σ=(2) 如果要求0.707?0K ζτ===,,其中(3) 4K =,为改善性能加s τ使%5%σ<,求τ=?习题3-11系统结构图(1) K s s K s G s G s ++=+=Φ2)(1)()(=)0,4(,2222==++τωζωωK s s nn n 2==K n ω,25.021==n ωζ %47%100%21=⨯=--ζζπσe 36s n t s ζω==,⎪⎪⎩⎪⎪⎨⎧===⇒===⇒=5.021********n n n n K K ωωζωζω (2) K s s K s G s G s ++=+=Φ2)(1)()()707.0,0,(,2222==++=ςτωζωωK s s nn n 求 5.0)707.021(707.01222=⨯==⇒⎭⎬⎫==n n K ωζζω; (3) )41(4)1(41)1(4)(ττ++=+++=s s s s s s s s G k ,24144s s s τΦ=+++()() 457.0412707.024*******=-⨯⨯=-=⇒⎩⎨⎧=+=n n n ζωτωτζω 注意:教材树P73最佳阻尼比的定义:0707ς=.时,系统的最大超调量435πσ-=<.%%%=e ,1.3调节时间最短,即平稳性和快速性最佳。
本题的启示:(1)求得原系统的超调量47σ=%%非常大,(2)为了降低超调<5%,降低了开环增益K 。
(注意:求解稳态误差时,为了提高精度,可以增大开环增益。
当设计者进行系统参数设定时,需要兼顾动静态指标) (3)为了降低超调<5%,在前向通道环节引入了微分环节。
3-12已知系统的单位阶跃响应曲线如图所示,求系统的闭环传递函数。
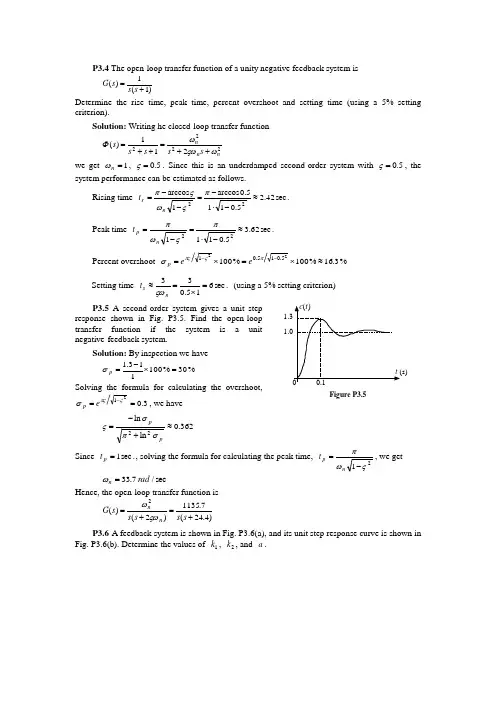
P3.4 The open-loop transfer function of a unity negative feedback system is)1(1)(+=s s s GDetermine the rise time, peak time, percent overshoot and setting time (using a 5% setting criterion).Solution: Writing he closed-loop transfer function 2222211)(nn ns s s s s ωςωωΦ++=++=we get 1=n ω, 5.0=ς. Since this is an underdamped second-order system with 5.0=ς, thesystem performance can be estimated as follows.Rising time.sec 42.25.0115.0arccos 1arccos 22≈-⋅-=--=πςωςπn r tPeak time.sec 62.35.011122≈-⋅=-=πςωπn p tPercent overshoot %3.16% 100% 100225.015.01≈⨯=⨯=--πςπςσee pSetting time.sec 615.033=⨯=≈ns t ςω(using a 5% setting criterion)P3.5 A second-order system gives a unit step response shown in Fig. P3.5. Find the open-loop transfer function if the system is a unit negative-feedback system.Solution: By inspection we have %30% 100113.1=⨯-=pσSolving the formula for calculating the overshoot,3.021==-ςπςσep, we have362.0ln ln 22≈+-=pp σπσςSince .sec 1=p t , solving the formula for calculating the peak time, 21ςωπ-=n p t , we gets e c / 7.33rad n =ωHence, the open-loop transfer function is )4.24(7.1135)2()(2+=+=s s s s s G n nςωωP3.6 A feedback system is shown in Fig. P3.6(a), and its unit step response curve is shown in Fig. P3.6(b). Determine the values of 1k , 2k , and a ..1.1Figure P3.5Solution: The transfer function between the input and output is given by2221)()(k as sk k s R s C ++=The system is stable and we have, from the response curve,21lim )(lim 122210==⋅++⋅=→∞→k sk as sk k s t c s tBy inspection we have %9% 10000.211.218.2=⨯-=pσSolving the formula for calculating the overshoot, 09.021==-ςπςσep, we have608.0ln ln 22≈+-=pp σπσςSince .sec 8.0=p t , solving the formula for calculating the peak time,21ςωπ-=n p t , we gets e c / 95.4rad n =ωThen, comparing the characteristic polynomial of the system with its standard form, we have22222n n s s k as s ωςω++=++5.2495.4222===n k ω02.695.4608.022=⨯⨯==n a ςωP3.8 For the servomechanism system shown in Fig. P3.8, determine the values of k and a that satisfy the following closed-loop system design requirements. (a) Maximum of 40% overshoot. (b) Peak time of 4s.Solution: For the closed-loop transfer function we have 22222)(nn ns sks k sk s ωςωωαΦ++=++=hence, by inspection, we getk n=2ω, αςωk n =2, and nnkωςςωα22==Taking consideration of %40% 10021=⨯=-ςπςσepresults in280.0=ς.In this case, to satisfy the requirement of peak time, 412=-=ςωπn p t , we have.s e c / 818.0r a d n =ω.2.2(a)(b)Figure P3.6Figure P3.8Hence, the values ofkandaare determined as67.02==n k ω, 68.02==nωςαP3.10 A control system is represented by the transfer function)13.04.0)(56.2(33.0)()(2+++=s ss s R s CEstimate the peak time, percent overshoot, and setting time (%5=∆), using the dominant polemethod, if it is possible.Solution: Rewriting the transfer function as]3.0)2.0)[(56.2(33.0)()(22+++=s s s R s Cwe get the poles of the system: 3.02.02 1j s ±-=,, 56.23-=s . Then, 2 1,s can be considered as a pair of dominant poles, because )Re()Re(32 1s s <<,.Method 1. After reducing to a second-order system, the transfer function becomes13.04.013.0)()(2++=s ss R s C (Note:1)()(lim==→s R s C k s Φ)which results in sec / 36.0rad n =ω and 55.0=ς. The specifications can be determined ass e c 0.42112ςωπ-=n p t , %6.12% 10021=⨯=-ςπςσeps e c 67.2011ln 12=⎪⎪⎪⎭⎫⎝⎛-=ς∆ςωns t Method 2. Taking consideration of the effect of non-dominant pole on the transient components cause by the dominant poles, we haves e c 0.8411)(231=--∠-=ςωπn p s s t%6.13% 10021313=⨯-=-ςπςσes s s ps e c 6.232ln 1313=⎪⎪⎭⎫⎝⎛-⋅=ss s t ns ∆ςωP3.13 The characteristic equations for certain systems are given below. In each case, determine the value of k so that the corresponding system is stable. It is assumed that k is positive number.(a) 02102234=++++k s s s s (b) 0504)5.0(23=++++ks s k sSolution: (a) 02102234=++++k s s s s .The system is stable if and only if⎪⎪⎩⎪⎪⎨⎧<⇒>=>9 022010102203k k D ki.e. the system is stable when 90<<k .(b) 0504)5.0(23=++++ks s k s . The system is stable if and only if⎪⎩⎪⎨⎧>-+⇒>-+⇒>+=>>+0)3.3)(8.34( 05024 041505.00 ,05.022k k k k k k D k ki.e. the system is stable when 3.3>k .P3.14 The open-loop transfer function of a negative feedback system is given by)12.001.0()(2++=s ss Ks G ςDetermine the range of K and ς in which the closed-loop system is stable. Solution: The characteristic equation is02.001.023=+++K s s s ς The system is stable if and only if⎪⎩⎪⎨⎧<⇒>-⇒>=>>ςςς20 001020 0101.02.002.0 ,02K K .ς.K D kThe required range is20>>K ς.P3.17 A unity negative feedback system has an open-loop transfer function )16)(13()(++=s s s K s GDetermine the range ofkrequired so that there are no closed-loop poles to the right of the line1-=s . Solution: The closed-loop characteristic equation is18)6)(3( 0)16)(13(=+++⇒=+++K s s s K s s si.e. 01818923=+++K s s sLetting 1~-=s s resulting in 0)1018(~3~6~ 018)5~)(2~)(1~(23=-+++⇒=+++-K s s s K s s sUsing Lienard-Chipart criterion, all closed-loop poles locate in the right-half s~-plane, i.e. to theright of the line 1-=s , if and only if⎪⎩⎪⎨⎧<⇒>-⇒>-=>⇒>-14 08.182 0311018695 ,010182K K K D K KThe required range is 91495 <<K , or56.10.56 <<KP3.18 A system has the characteristic equation0291023=+++k s s sDetermine the value of k so that the real part of complex roots is 2-, using the algebraic criterion.Solution: Substituting 2~-=s s into the characteristic equation yields 02~292~102~ 23=+-+-+-k s s s )()()( 0)26(~~4~ 23=-+++k s s sThe Routh array is established as shown.If there is a pair of complex roots with real part of 2-, then026=-ki.e. 30=k . In the case of 30=k , we have the solution of the auxiliary equation j s ±=~, i.e. j s ±-=2.3s 1 12s 4 26-k1s 0sP3.22 The open-loop transfer function of a unity negative feedback system is given by)1)(1()(21++=s T s T s Ks GDetermine the values of K , 1T , and 2T so that the steady-state error for the input, bt a t r +=)(, is less than 0ε. It is assumed that K , 1T , and 2T are positive, a and b are constants. Solution: The characteristic polynomial is K s s T T s T T s ++++=221321)()(∆Using L-C criterion, the system is stable if and only if2121212121212 0 01T T T T K T KT T T T T K T T D +<⇒>-+⇒>+=Considering that this is a 1-type system with a open-loop gain K , in the case of 2121T T T T K +<,we have 00.. εεεεεbK Kb v ss r ss ss>⇒<=+=Hence, the required range for K is21210T T T T K b+<<εP3.24 The block diagram of a control system is shown in Fig. P3.24, where )()()(s C s R s E -=. Select the values of τ and b so that the steady-state error for a ramp input is zero.Solution: Assuming that all parameters are positive, the system must be stable. Then, the error response is)()1)(1()(1)()()(21s R K s T s T b s K s C s R s E ⎥⎦⎤⎢⎣⎡++++-=-=τ)()1)(1()1()(2121221s R Ks T s T Kb s K T T sT T ⋅+++-+-++=τLetting the steady-state error for a ramp input to be zero, we get 221212210.)1)(1()1()(lim )(lim sv K s T s T Kb s K T T sT T s s sE s s r ss ⋅+++-+-++⋅==→→τεwhich results in ⎩⎨⎧=-+=-0121τK T T Kb I.e. KT T 21+=τ,Kb 1=.P3.26 The block diagram of a system is shown in Fig. P3.26. In each case, determine the steady-state error for a unit step disturbance and a unit ramp disturbance, respectively. (a) 11)(K s G =,)1()(222+=s T s K s GFigure P3.24Figure P3.26(b)ss T K s G )1()(111+=,)1()(222+=s T s K s G , 21T T >Solution: (a) In this case the system is of second-order and must be stable. The transfer function from disturbance to error is given by 212212.)1(1)(K K Ts s K G G G s d e ++-=+-=ΦThe corresponding steady-state errors are 1212.11)1(lim K s K K Ts s K s s p ss -=⋅++-⋅=→ε∞→⋅++-⋅=→2212.1)1(lim sK K Ts s K s s ass ε(b) Now, the transfer function from disturbance to error is given by )1()1()(121222.+++-=s T K K s T s sK s d e Φand the characteristic polynomial is21121232)(K K s T K K s s T s +++=∆ Using L-C criterion,0)(121211212212>-==T T K K T K K T K K Dthe system is stable. The corresponding steady-state errors are 01)1()1(lim 1212220.=⋅+++-⋅=→ss T K K s T s sK s s p ss ε121212220.11)1()1(lim K ss T K K s T s sK s s a ss -=⋅+++-⋅=→ε。

3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
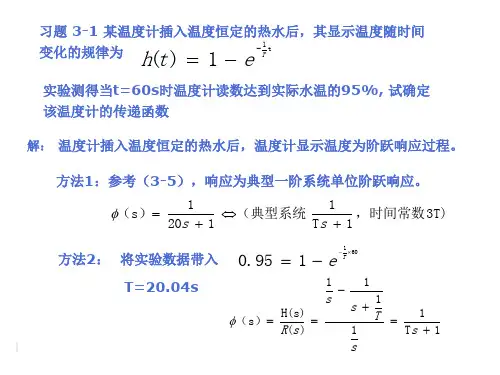
3-1设温度计需要在一分钟内指示出响应值的98%,并且假设温度计为一阶系统,求时间常数T 。
如果将温度计放在澡盆内,澡盆的温度以10C/min 的速度线性变化。
求温度计的误差。
解:c(t)=c(∞)98%t=4T=1 min r(t)=10te(t)=r(t)-c(t)c(t)=10(t-T+e )-t/T =10(T-e )-t/T =10T =2.5T=0.253-2电路系统如图所示,其中F C k R k R μ5.2,200,20110=Ω=Ω=。
设系统初始状态为零,试求:系统的单位阶跃响应8)()(1=t u t u c c 以及时的1t 值;解:R 1Cs+1R 1/R 0G (s )= u c (t)=K(1–e t T -)KTs +1=T=R 1C=0.5 K=R 1/R 0=10=10(1–e -2t )8=10(1–e -2t)0.8=1–e-2te -2t =0.2 t=0.8g(t)=e -t/T T Kt 1=0.8=4u c (t)=K(t-T+T e -t/T )=4R(s)=1s 2R(s)=1R(s)=1s 3T 2=K(s s+1/T+T s 2-1s 3-T 2)=1.2Ts 1s 3K +1U c (s)= -0.5t+0.25-0.25e -2t )12t 2u c (t)=10(3-3已知单位反馈系统的开环传递函数为)5(4)(+=s s s G 试求该系统的单位阶跃响应。
解:C(s)=s 2+5s+4R(s)4s(s+1)(s+4)C(s)=4R(s)=s1s+41+1/3s =4/3s +1-c(t)=1+ 4e 13-4t -t 3-e3-4已知单位负反馈系统的开环传递函数为 )1(1)(+=s s s G 试求该系统的上升时间r t 。
、峰值时间p t 、超调量%σ和调整时间s t 。
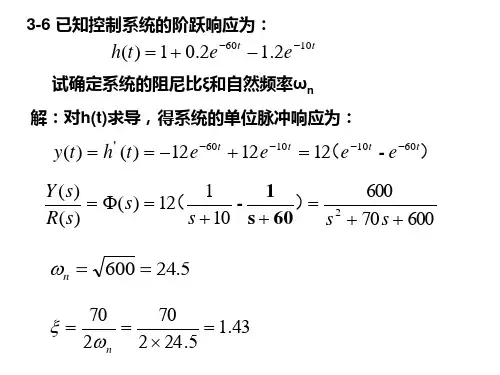
1s(s+1)G(s)=t p =d ωπ 3.140.866= =3.63t s = ζ3ωn=6t s = ζ4ωn =8解:C(s)=s 2+s+1R(s)12= 1ωn 2ωn ζ=1ζ=0.5=1ωn =0.866d ω= ωn 2 ζ1-=60o -1ζ=tg β21-ζt r =d ωπβ-= 3.14-3.14/30.866=2.42σ%=100%e -ζζπ1-2=16%e -1.83-6已知系统的单位阶跃响应为t te et c 10602.12.01)(---+= ,试求:(1)系统的闭环传递函数;(2)系统的阻尼比ζ和无阻尼自然震荡频率n ω;解:s+60+C(s)=0.21s 1.2s +10-s(s+60)(s+10)=600=s 2+70s+600C(s)R(s)600R(s)=s 12=600ωn2ωn ζ=70ζ=1.43=24.5ωn3-7设二阶控制系统的单位阶跃响应曲线如图所示,如果该系统为单位负反馈系统,试确定其开环传递函数。
3-3 解:该二阶系统的最大超调量:%100*21/ζζπσ--=ep当%5=pσ时,可解上述方程得:69.0=ζ当%5=pσ时,该二阶系统的过渡时间为:ns w t ζ3≈所以,该二阶系统的无阻尼自振角频率17.22*69.033==≈sn t w ζ3-4 解:由上图可得系统的传递函数:10)51(*2)1(*10)2()1(*101)2()1(*10)()(2++++==+++++=s K s Ks s s Ks s s Ks s R s C所以10=n w ,K w n 51+=ζ⑴ 若5.0=ζ时,116.0≈K 所以116.0≈K 时,5.0=ζ⑵ 系统单位阶跃响应的超调量和过渡过程时间分别为:9.110*5.033%3.16%100*%100*225.01/14.3*5.01/≈==≈==----ns pw t e eζσζζπ⑶ 加入)1(Ks +相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变化率)提高了,从而缩短了过渡时间:总之,加入)1(Ks +后,系统响应性能得到改善。
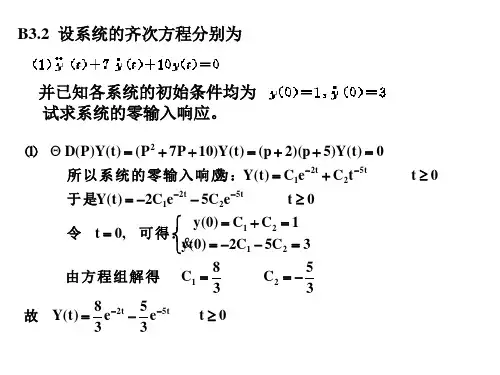
3-5 解:由上图可得该控制系统的传递函数:12110)110(10)()(K s s K s R s C +++=τ二阶系统的标准形式为:2222)()(nn nws w s w s R s C ++=ζ所以11021012+==τζn n w K w由5.0%5.91%100*21/2==-==--p pn p pt w t eσζπσζζπ可得85.76.0==n w ζ由11021012+==τζn n w K w 和85.76.0==n w ζ可得:64.0384.016.61=≈==ns w t K ζτ3-6 解:⑴ 列出劳斯表为:因为劳斯表首列系数符号变号2次,所以系统不稳定。
⑵ 列出劳斯表为:因为劳斯表首列系数全大于零,所以系统稳定。
自动控制理论第三章作业答案题3-4解:系统的闭环传递函数为2()()1()1()1C s G s R s G s s s ==+++ 由二阶系统的标准形式可以得到11, 2n ωζ==因此,上升时间 2.418r dd t s ππβωω--===峰值时间 3.6276p d t s πω=== 调整时间:35% 642% 8s n s n t s t s ωζωζ∆=≈=∆=≈=超调量:100%16.3%p M e =⨯=题3-5解:22()10()(51)10102510.60.5589n n n C s R s s a s a a ωωζωζ=+++⎧=⎧=⎪⎪⇒⇒⎨⎨=+==⎪⎩⎪⎩⇒=闭环传递函数1.242100%9.45%pdpt sM eπω====⨯=35% 1.58142% 2.108snsnt st sωζωζ∆=≈=∆=≈=题3-7解:0.11.31100%30%1pdptM eπω===-=⨯==上升时间超调量=0.357933.64nζω⎧⇒⎨=⎩221131.9()(2)24.08nnG ss s s sωζω==++开环传递函数题3-8(1)2100()(824)G ss s s=++解:闭环传递函数为2()100()(824)100C sR s s s s=+++特征方程为328241000s s s+++=列出劳斯表:3212408100011.50100ssss第一列都是正数,所以系统稳定(2)10(1)()(1)(5)sG ss s s+=-+解:闭环传递函数()10(1)()(1)(5)10(1)C s s R s s s s s +=-+++ 特征方程为3255100s s s +++=列出劳斯表:32015041002.5010s s ss 第一列都是正数,所以系统稳定 (3)10()(1)(23)G s s s s =-+ 解:闭环传递函数()10()(1)(23)10C s R s s s s =-++ 特征方程为3223100s s s +-+=列出劳斯表:3210230110023010s s ss --劳斯表第一列的数符号变了2次,因此在s 平面的右半部分有两个特征根,系统不稳定。
3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。