第九章矩阵位移法习题集
- 格式:doc
- 大小:1.85 MB
- 文档页数:24
第九章 矩阵位移法 【练习题】9-1 是非题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
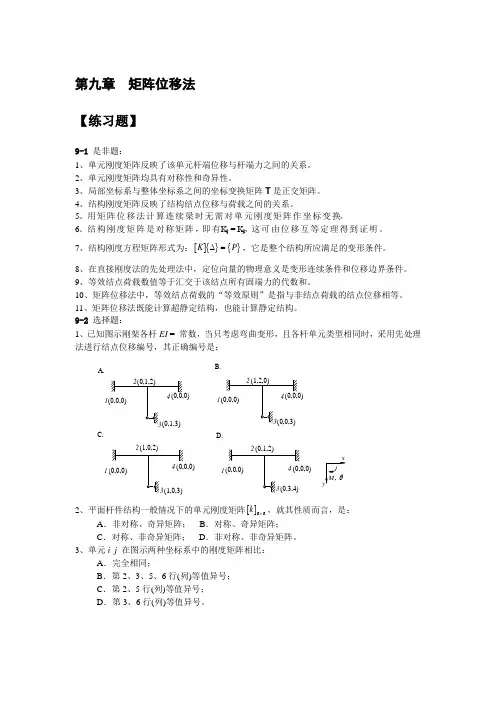
9-2 选择题:1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下的单元刚度矩阵[]k 66⨯,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。
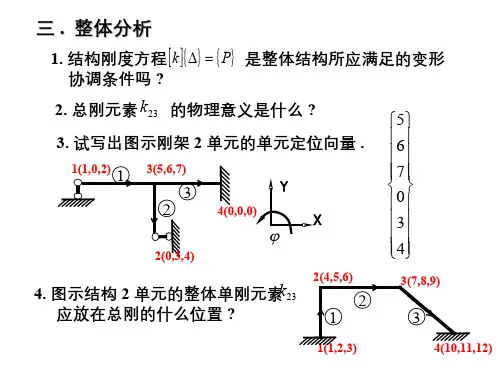
3、单元i j 在图示两种坐标系中的刚度矩阵相比:A .完全相同;B .第2、3、5、6行(列)等值异号;C .第2、5行(列)等值异号;D .第3、6行(列)等值异号。
jxi4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。
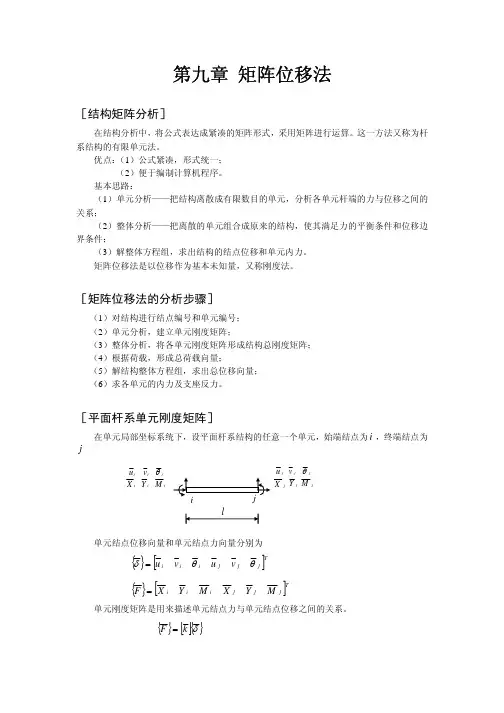
第9章 矩阵位移法9.1 复习笔记一、矩阵位移法的基本思路矩阵位移法又称为杆件结构的有限元法。
分析的两个基本步骤:(1)单元分析;(2)整体分析。
单元分析:建立杆端力与杆端位移间的刚度方程,形成单元刚度矩阵。
整体分析:将单元合成整体,按照刚度集成规则形成整体刚度矩阵,建立位移基本方程。
二、单元刚度矩阵(局部坐标系)进行单元分析,推导单元刚度方程和单元刚度矩阵。
单元刚度方程是指由单元杆端位移求单元杆端力的一组方程,可以用“”表示,由位移求力称为“正问题”。
相应的由力求位移称为“反问题”。
正问题的解是唯一的确定的,但是反问题则可能无解,如果有解也非唯一解。
当外部荷载为不平衡力系时,反问题无解;当外荷载为平衡力系时,反问题有解但是因为杆件除本身变形外还可有任意刚体位移,此时反问题的解不唯一。
本书暂不考虑反问题的求解。
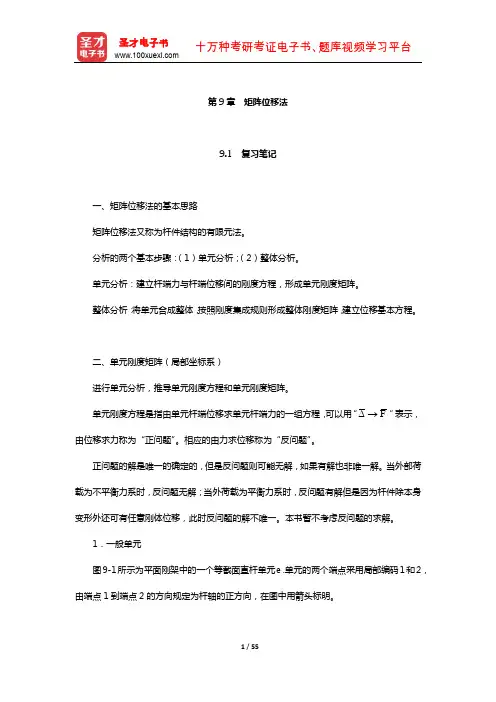
1.一般单元图9-1所示为平面刚架中的一个等截面直杆单元.单元的两个端点采用局部编码1和2,由端点1到端点2的方向规定为杆轴的正方向,在图中用箭头标明。
F →∆e图9-1图中采用坐标系,其中轴与杆轴重合。
这坐标系称为单元坐标系或者局部坐标系。
字母、的上面都画了一横,作为局部坐标系的标志。
推导单元刚度方程时,有以下几点需要注意:重新规定正负号规则、讨论杆件单元的一般情况、采用矩阵表示形式。
在局部坐标系中,图9-2所示的位移、力分量方向为正方向。
图9-2杆件性质:长度l ,截面面积A ,截面惯性矩I ,弹性模量E ;杆端位移u 、v 、θ。
根据杆端位移可以推导出下面两组刚度方程:(9-1)x y x x y(9-2)将上述六个刚度方程列成矩阵形式:(9-3)其中就是局部坐标系下单元刚度矩阵,即为(9-4)2.单元刚度矩阵的性质 (1)单元刚度系数的意义e e ek F∆=eK代表单元杆端第j 个位移分量等于1时所引起的第i 个杆端力分量。
(2)是对称矩阵,即。
(3)一般单元的是奇异矩阵,即,因此不存在逆矩阵。
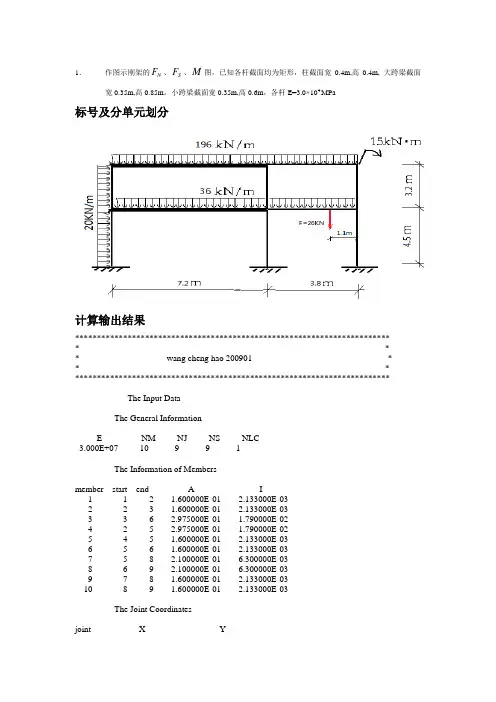
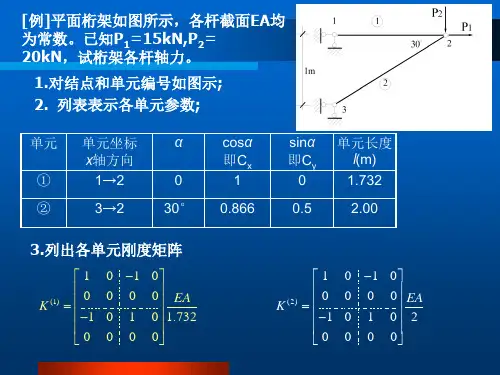
1.作图示刚架的N F 、S F 、M 图,已知各杆截面均为矩形,柱截面宽0.4m,高0.4m, 大跨梁截面宽0.35m,高0.85m ,小跨梁截面宽0.35m,高0.6m ,各杆E=3.0×104 MPa标号及分单元划分计算输出结果************************************************************************* * * wang cheng hao 200901 * * * ************************************************************************The Input DataThe General InformationE NM NJ NS NLC 3.000E+07 10 9 9 1The Information of Membersmember start end A I1 12 1.600000E-01 2.133000E-03 2 2 3 1.600000E-01 2.133000E-03 3 3 6 2.975000E-01 1.790000E-024 25 2.975000E-01 1.790000E-02 5 4 5 1.600000E-01 2.133000E-036 5 6 1.600000E-01 2.133000E-037 58 2.100000E-01 6.300000E-03 8 69 2.100000E-01 6.300000E-03 9 7 8 1.600000E-01 2.133000E-03 10 8 9 1.600000E-01 2.133000E-03The Joint Coordinatesjoint X Y1 .000000 .0000002 .000000 4.5000003 .000000 7.7000004 7.200000 .0000005 7.200000 4.5000006 7.200000 7.7000007 10.000000 .0000008 10.000000 4.5000009 10.000000 7.700000The Information of SupportsIS VS11 .00000012 .00000013 .00000041 .00000042 .00000043 .00000071 .00000072 .00000073 .000000( NA= 180 )( NW= 673 )Loading Case 1The Loadings at JointsNLJ= 1ILJ PX PY PM9 .0000 .0000 -15.00000The Loadings at MembersNLM= 7ILM ITL PV DST1 3 20.0000 4.5000002 3 20.0000 3.2000003 4 -196.0000 7.2000004 4 -36.0000 7.2000007 2 -26.0000 2.7000007 4 -36.0000 3.8000008 4 -196.0000 3.800000The Results of CalculationThe Joint Displacementsjoint u v phi1 3.034552E-21 -7.568894E-20 -7.494658E-212 4.656375E-03 -7.095838E-04 -4.689976E-043 6.414487E-03 -1.138627E-03 -3.252309E-034 4.091261E-21 -1.284215E-19 -9.106066E-215 4.698061E-03 -1.203951E-03 6.981090E-056 6.309349E-03 -1.976041E-03 2.021588E-037 3.774187E-21 -5.368958E-20 -8.623830E-218 4.687578E-03 -5.033399E-04 -9.276283E-059 6.303058E-03 -7.395401E-04 -5.394127E-04The Terminal Forcesmember N(st) Q(st) M(st) N(en) Q(en) M(en)1 756.889 75.346 108.697 -756.889 14.654 27.8582 643.565 -66.328 -84.600 -643.565 130.328 -230.0493 130.328 643.565 230.049 -130.328 767.635 -676.7014 -51.673 113.325 56.742 51.673 145.875 -173.9265 1284.215 40.913 91.061 -1284.215 -40.913 93.0466 1158.135 116.174 146.849 -1158.135 -116.174 224.9087 23.588 -19.795 -65.969 -23.588 182.595 -115.1788 14.154 390.500 451.794 -14.154 354.300 -28.7159 536.896 37.742 86.238 -536.896 -37.742 83.60010 354.300 14.154 31.578 -354.300 -14.154 13.715( NA= 180 )( NW= 701 )2、计算图示桁架各杆的轴力。
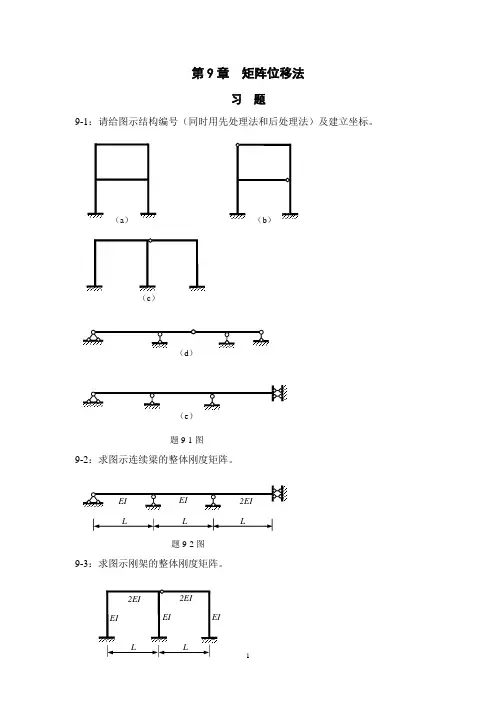
第9章 矩阵位移法习 题9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。
题9-1图 9-2:求图示连续梁的整体刚度矩阵。
题9-2图9-3:求图示刚架的整体刚度矩阵。
(c )(e )题9-3图9-4:求图示组合结构的整体刚度矩阵。
题9-4图9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。
题9-5图9-6:求图示排架结构的整体刚度矩阵。
题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。
1kN/m题9-7图9-8:求图示结构的等效结点荷载,请利用结构的对称性。
题9-8图9-9:求图示结构的等效结点荷载。
题9-9图9-10:求出图示结构的荷载列阵。
题9-10图9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。
qq题9-11图9-12:求图示结构的荷载列阵,考虑轴向变形。
题9-12图9-13:求图示结构的荷载列阵。
题9-13图9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。
题9-14图10kN/mq9-15:请求出图示连续梁的整体刚度方程。
题9-15图9-16:求图示连续梁的整体刚度矩阵。
题9-16图9-17:图示结构温度发生了变化,请求出整体刚度方程。
杆件的EI 、EA 相同。
题9-17图9-18:图示结构温度发生了变化,请求出整体刚度方程。
题9-18图9-19:图示结构发生了支座移动,请画出结构的内力图。
00题9-19图9-20:已知图示梁B 点的B v 、B ϕ和C 点的C ϕ,请求出单元杆端力的列阵。
题9-20图9-21:求题9-3图示刚架的整体刚度矩阵,忽略轴向变形。
9-22:求题9-10图示结构的整体刚度矩阵,用后处理法编号。
9-23:求出梁的整体刚度方程,弹簧的刚度系数为k 。
题9-23图9-24:求出图示结构的整体刚度方程,忽略轴向变形,弹簧刚度系数为k 。
题9-24图L。
1.图示平面刚架的缩减后的总刚的阶数为___________。
(中南大学2011)4.(14分)图示平面结构用矩阵位移法计算,引入支承条件的总体刚度矩阵是多少阶?求结点2、结点5的综合结点荷载列阵。
(中南大学2011)q5.(13分)图示平面结构用矩阵位移法计算,原始刚度矩阵是多少阶?试求结点2、结点3的综合结点荷载列阵。
(中南大学2012)4m4m4. 矩阵位移法只能计算超静定结构,不能计算静定结构。
()(中南大学2012)6.(13分)图示平面结构用矩阵位移法计算,求结点3、结点4和结点5的综合结点荷载列阵。
(中南大学2013)2.已求得图示梁3个结点的转角列阵为{ }=[0i/ql-562i/ql16852]T,EI为常数。
则B支座的反力为___________。
(中南大学2013)3. 在矩阵位移法中将单元集合成整体时应引入结构的物理关系和变形连续条件。
()(中南大学2013)7.(15分)计算图示结构结点2和结点6的综合结点荷载列阵{}2P和{}6P。
(中南大学2014)3.图示结构的原始刚度矩阵的最大带宽为___________。
(中南大学2014)109876111315181917161412543213. 已用矩阵位移法求得图a所示结构单元③的杆端力(整体坐标)为{}=F[-3 -1 -4 3 1 -2]T(单位:mkN,Nk⋅),则单元③的弯矩图为图b。
()(中国矿业大学2011)(中南大学2014)24M图(kN·m)(a)(b)七、已知图示连续梁结点位移列阵{}θ如下所示,试用矩阵位移法求出23杆件的杆端弯矩,并画出该连续梁的弯矩图。
已知图中m/kNq20=,23杆的线刚度cmkN.i⋅⨯=6101{}θ=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧862725147653..-..-(中国矿业大学2012)q3m6m3m7-1、用矩阵位移法分别计算图(a)所示连续梁在图(b)和图(c)两种荷载作用下的结点角位移和各单元杆端力,边界采用后处理法,略去轴向变形影响。
第9章矩阵位移法习题解答习题9・1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
(T )(2)矩阵位移法棊木未知量的数冃与位移法棊木未知量的数冃总是相等的。
(|T*) F(3)单元刚度矩阵都具有对称性和奇界性。
(F )(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
(T )(5)结构刚度短阵与单元的编号方式冇关。
(F )(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
(F )【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错谋。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统-•编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1) ______________________________________________________________ 矩阵位移法分析包含三个基本环节,其一是结构的___________________________________ ,其二是_________ 分析,-其三是______ 分析。
(2)已知某单元©的定位向量为[3 5 6 7 8 9]丁,则单元刚度系数紜应叠加到结构刚度矩阵的元素—中去。
(3) ________________________________________________________________________ 将非结点荷载转换为等效结点荷载,等效的原则是____________________________________ o(4)矩阵位移法屮,在求解结点位移之前,主要工作是形成_____________________ 矩阵和_______________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为J2=[w2V2 ft]T=[O.S 0.3 0.5]丁,单元①的始、末端结点码为3、2,单元定位向量为= [0 0 0 3 4 5]T,设单元与兀轴之间的夹角为« = |,则(6 )用短阵位移法求得平面刚架某单元在单元坐标系中的杆端力为戸=[7.5 -48 -70.9 -7.5 48 -121.09]7,则该单元的轴力F* _______________________ k N。
第9章矩阵位移法典型题
1. 用矩阵位移法计算图持续梁,并画M图,EI=常数。
图
解:
(1)成立坐标系,对单元和结点编号如图,单元刚度矩阵
单元定位向量λ①=(01)T,λ②=(12)T,λ③=(20)T
(2)将各单元刚度矩阵中的元素按单元定位向量在K中对号入座,得整体刚度矩阵
(3)持续梁的等效结点荷栽
(4)将整体刚度矩阵K和等效结点荷载P代人大体方程
(5)求杆端力并绘制弯矩图(图)。
2. 图结构,荷载只在(1),(3)杆上作用,已知(1),(3)杆在局部坐标系(杆件箭头方向)中的单元刚度矩阵均为(长度单位为m,角度单位为rad,力单位为kN)
杆件(2)的轴向刚度为EA=×l06kN,试形成结构的整体刚度矩阵。
图
解:
(1)结构的结点位移编号及局部坐标方向(杆件箭头方向)见图。
(2)单元(1),(3)的局部与整体坐标方向一致,故其在整体坐标系中的单元刚度矩阵与局部坐标系中的相同。
(3)桁架单元(2)的刚度矩阵
桁架单元只有轴向的杆端力和杆瑞位移,
(3)定位向量
单元(1):
单元(2):
单元(3):
(4)整体刚度矩阵
=
3. 求图结构整体刚度矩阵。
各标EI相同,不考轴向变形。
图
解:
(1)单元结点编号(图)
(2)单元的定位向量
(0051)T(0054)T
(5354)T(5200)T (3)单元刚度矩阵
(4)整体刚度矩阵。
第九章 矩阵位移法 【练习题】9-1 是非题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
9-2 选择题:1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下的单元刚度矩阵[]k 66⨯,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中的刚度矩阵相比:A .完全相同;B .第2、3、5、6行(列)等值异号;C .第2、5行(列)等值异号;D .第3、6行(列)等值异号。
jxi4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。
5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 :A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ;B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ;C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ;D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。
9-3 填充题:1、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
2、图 示 刚 架 用 两 种 方 式 进 行 结 点 编 号 ,结 构 刚 度 矩 阵 最 大 带 宽 较 小 的 是 图 。
35641271234567(a)(b)3、图 示 梁 结 构 刚 度 矩 阵 的 主 元 素 K K 1122== ,ll4、图 示 桁 架 结 构 刚 度 矩 阵 有 个 元 素 ,其 数 值 等 于 。
3m3m ABC DEAEAEA5、用 矩 阵 位 移 法 解 图 示 连 续 梁 时 ,结 构 的 综 合 结 点 荷 载 是l /2lll /26、已知图示桁架杆件①的单元刚度矩阵为式(a),又已知各结点位移为式(b),则杆件①的轴力(注明拉力或压力)应为N①= 。
l[]k EA l u v u v u v u v Pl EA ①=--⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎧⎨⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪=-⎧⎨⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪1(a) b)010*********005100230011223344 (9-4 用先处理法写出图示梁的整体刚度矩阵[]K 。
123llli 0123i i9-5 用先处理法写出图示梁的结构刚度矩阵[]K 。
123ll4lEI EI EI 239-6 计算图示结构的综合结点荷载列阵{}P 。
l /2l /2l /2l /2ll9-7 计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
l /2l l /29-8 已 知 图 示 连 续 梁 结 点位 移 列 阵 {}θ如 下 所 示 ,试 用 矩 阵 位 移 法 求 出 杆 件 23 的 杆 端 弯 矩 并 画 出 连 续 梁的 弯 矩 图 。
设 q = 20kN /m ,23 杆 的 i =⨯⋅10106.kN cm 。
{}θ=--⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪⨯-365714572286104....rad6m3m3m9-9 已知图示梁结点转角列阵为{}[]∆=056516822-/ /Tql i ql i ,EI =常数。
计算B 支座的反力。
1m1m9-10 试 用 矩 阵 位 移 法 解 图 示 连 续 梁 ,绘 弯 矩 图 。
EI = 已 知 常 数 。
xθ9-11 试 求 结 构 原 始 刚 度 矩 阵 中 的 子 块 []K 22,已 知 单 元 ①的 整 体 坐 标 的 单 元 刚 度 矩阵 为 :[]K ①=-⨯-⨯---⨯-⨯⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥72360072360036003600723600360036001103600210442101107244ll9-12 用先处理法写出图示结构的结构刚度矩阵[]K 。
E =常数。
ll 9-13 用先处理法计算图示连续梁的结点荷载列阵{}P 。
m4m4m49-14 计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
m3m3m 4m 49-15 已 知 图 示 两 端 固 定 梁 跨 中 结 点 C 的 竖 向 位 移 为 ∆CV l EI =-5123() ,转 角 ϕC =0 ,l =5m ,EI =常 数 。
试 求 单 元 ① 、② 的 杆 端 力 列 阵 。
ll9-16 用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
123ll4l5EI2EIEA(0,0,0)(0,0,1)(0,2,3)(0,0,0)(0,2,4)(0,0,0)EI9-17 用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
l9-18 写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
[][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :9-19 已知图示结构在整体坐标系中的单元刚度矩阵。
用先处理法集成结构刚度矩阵[]K 。
(用子块形式写出)。
[][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :9-20 用先处理法写出图示刚架的结构刚度矩阵[]K ,只考虑弯曲变形。
EI EI EIEI=o ol ll9-21 用先处理法写出图示结构的结构刚度矩阵[]K 。
各杆长度为l ,EA 、EI 为常数。
ABCD9-22 用先处理法写出以子块表示的图示结构的结构刚度矩阵[]K 。
m 12m9-23 用先处理法写出图示刚架结构刚度矩阵[]K 。
已知:[][][]k k k ①②③===⨯--------⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥10300003000001230012300301000305030000300000123001230030500301004x9-24 计算图示结构结点3的等效结点荷载列阵{}P 3E 。
m224m49-25计算图示结构结点2的等效结点荷载列阵{}P 2E 。
l /2l /29-26 计算图示结构的综合结点荷载列阵元素431,,P P P 。
lll9-27 用先处理法计算图示结构的综合结点荷载列阵{}P 。
l/2/29-28 计算图示结构结点荷载列阵中的元素654,,P P P 。
l/2l /2(0,7,8)39-29 计算图示结构综合结点荷载列阵中的元素431,,P P P 。
P l l l9-30 计算图示结构综合结点荷载列阵{}P 中的元素9873,,,P P P P 。
lll29-31 计算图示刚架对应于自由结点位移的综合结点荷载列阵{}P 。
m3m3m9-32 计算图示刚架对应自由结点位移的综合结点荷载列阵{}P 。
各杆长度为 4m 。
9-33 计算图示结构结点2的综合结点荷载列阵{}P 2。
l /2l l /2l l9-34 计算图示刚架考虑弯曲、轴向变形时的综合结点荷载列阵{}P 。
9-35 若考虑弯曲、轴向变形,用先处理法写出图示结构综合结点荷载列阵{}P 。
l /2l/2ql9-36 考虑弯曲、轴向变形,计算图示结构综合结点荷载列阵{}P 。
m 4m2m2m39-37 考虑弯曲、轴向变形时,用先处理法计算图示结构综合结点荷载列阵{}P 。
8mm5m69-38 用先处理法计算图示结构的综合结点荷载列阵{}P 。
/2/2ll9-39 试 用 矩 阵 位 移 法 解 图 示 结构,绘 弯 矩 图 。
m 1mm1kN m.9-40 计算下图结构(a )中杆34的杆端力列阵中的第3个元素和第6个元素。
不计杆件的轴向变形。
已知下图结构(a )结点位移列阵为:{}[]T0.666670.2 0.7556- 0 0.3667 0 0.3333 0.2 0.2- 0.1333 00.2- 0 0 0=∆。
1m1mll(a ) (b )9-41 计算上图结构(b )单元③的杆端力列阵{}③F,已知各杆,cm 300 ,kN/cm 101.2424=⨯=I E ,cm 202=A cm l 100=,结点2位移列阵{}[][]T T 2rad cm cm 5313.04596.04730.01012222--⨯⨯==-θ∆v u 。
9-42考虑杆件的轴向变形,计算图示结构中单元①的杆端力{}F ①。
已知:I =(/),124m4E =⨯3107kN /m 2,m 2A =05.。
结点1的位移列阵{}[]δ16110370022710151485=⨯⨯---...m m rad T。
5m9-43 计算图示刚架单元①在局部坐标下的杆端力{}F ①。
已知各杆E 、A 、I 、l 均为常数,不考虑杆件的轴向变形,{}[]∆=--ql EIl l 2100002727 0 5 19 0 0T。
lq9-44 已求得图示结构结点2、3的结点位移为式(a)、(b)并已知单元②的整体坐标的单元刚度矩阵。
计算单元②2端的弯矩。
(长度单位m ,力单位kN ,角度单位弧度)(b)10 , (a)1040-160-0.2=5-5- ⨯⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧---=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⨯⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧108.1593.0333222φφv u v u[]510205.1105.1050005005.105.15.105.1105.1205.1050005005.105.15.105.1⨯⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-------=②k9-45 用先处理法写出图示桁架的结构刚度矩阵[]K 。