习题3 光电编码器
- 格式:doc
- 大小:274.00 KB
- 文档页数:4

1、生产布料的车间用图所示的装置来检测和控制布料卷取过程中的松紧程度。
请分析填空。
图差动变压器式张力检测控制系统1 —变速传送电动机2 —传动辊3 —导向辊4 —张力辊5 —衔铁6 —砝码7 —卷取辊 8 —布料 9 —伺服电动机当卷取辊转动太快时,布料的张力将 _________ (增大 / 减小)。
导致张力辊向 ________ (上 / 下)位移。
使差动变压器的衔铁不再处于中间位置。
N 21 与N 1 之间的互感量M 1 _______ (增加 / 减小),N 22 与N 1 的互感量M 2 _______ 。
因此U 21 ______ (增大 / 减小),U 22 ______ ,经差动检波之后的U o 为 ______ (负 / 正)值,去控制伺服电动机,使它的转速变______ (快 / 慢),从而使张力恒定。
2、左图所示为一人体身高和体重测量装置外观,右图所示为测量身高的传动机构简图,请分析填空并列式计算。
图测量身高的传动机构简图a )测量装置外观b )传动机构简图1 —底座2 —标杆3 —原点4 —立柱5 —皮带轮6 —传动带7 —电动机8 —光电编码器1 )测量体重的荷重传感器应该选择 _____________ 。
该传感器应安装在部位。
2 )设传动轮的减速比为 1 : 5 (即D 1 :D 2 =1 : 5 ),则电动机每转一圈,皮带轮转了 ________ 圈。
3 )在身高测量中,若光电编码器的参数为 1024p / r ,则电动机每转动一圈,光电编码器产生 _________ 个脉冲。
4 )设皮带轮的直径 D=0.1592m ,则皮带轮每转一圈,标杆上升或下降 m 。
电动机每转一圈,标杆上升或下降 _______________m 。
每测得一个光电编码器产生的脉冲,就说明标杆上升或 ___________________m 。
5) 设标杆原位(基准位置)距踏脚平面的高度h 0 =2.2m ,当标杆从图中的原位下移碰到人的头部时,共测得 5120 个脉冲,则标杆位移了______________________m ,该人的身高h =___________________m 。

光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。

光电编码器的工作原理
光电编码器是一种常用于测量和检测物理运动和位置的装置。
其工作原理基于光电效应和编码技术。
1. 光电效应
光电效应是指当光照射到特定的物质表面时,光子的能量会转化为电子的能量,从而引起电流的流动。
光电编码器利用光电效应产生光信号和电信号之间的转换。
2. 光电编码技术
光电编码器使用光栅或光轮作为编码器的核心部件。
光栅是由透明和不透明线条交替排列而成的圆盘,而光轮是由周期性的透明和不透明窗口组成的。
当光栅或光轮转动时,它们会产生不同的光信号,这些光信号会被光电元件(如光电二极管或光敏电阻)接收并转换为电信号。
3. 工作原理
在光电编码器中,光栅或光轮的旋转会导致光信号的变化。
光电元件接收到光信号后,会将其转换为电信号。
根据光信号的变化,可以确定光栅或光轮的位置和运动方向。
光电编码器通常包含两个或多个光电传感器,它们安装在固定位置,并与光栅或光轮对应。
通过比较不同光电传感器接收到的光信号,可以确定光栅或光轮的位置和方向。
4. 应用
光电编码器广泛应用于自动化系统中,用于测量和控制位置、速度和角度。
它们被用于各种设备和机械系统,如机械车床、印刷机、机器人、电梯等。
通过测量光栅或光轮的位置变化,可以实现精确的位置控制和运动检测。

【最新整理,下载后即可编辑】高精度的光电编码器的结构及原理2009年06月12日星期五8:48本文主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。
一、光电编码器的介绍:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。
根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。
(一)、绝对式光电编码器绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。
编码盘是按照一定的编码形式制成的圆盘。
图1是二进制的编码盘,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。
通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。
如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、 (1111)【最新整理,下载后即可编辑】图1按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。
当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平“0”,遮光的码道对应的光敏二极管不导通,输出高电平“1”,这样形成与编码方式一致的高、低电平输出,从而获得扇区的位置脚。
(二)、增量式光电编码器Increamental Optical-electrical Encoder增量式光电编码器是码盘随位置的变化输出一系列的脉冲信号,然后根据位置变化的方向用计数器对脉冲进行加/减计数,以此达到位置检测的目的。
它是由光源、透镜、主光栅码盘、鉴向盘、光敏元件和电子线路组成。
【最新整理,下载后即可编辑】增量式光电编码器的工作原理是是由旋转轴转动带动在径向有均匀窄缝的主光栅码盘旋转,在主光栅码盘的上面有与其平行的鉴向盘,在鉴向盘上有两条彼此错开90o相位的窄缝,并分别有光敏二极管接收主光栅码盘透过来的信号。
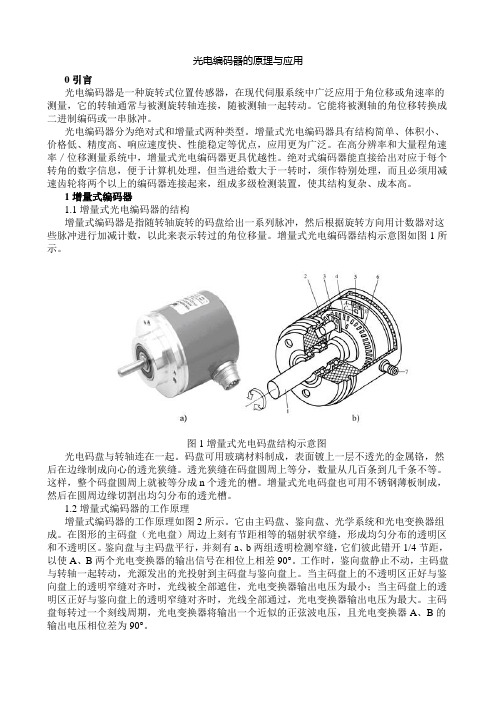
光电编码器的原理与应用0引言光电编码器是一种旋转式位置传感器,在现代伺服系统中广泛应用于角位移或角速率的测量,它的转轴通常与被测旋转轴连接,随被测轴一起转动。
它能将被测轴的角位移转换成二进制编码或一串脉冲。
光电编码器分为绝对式和增量式两种类型。
增量式光电编码器具有结构简单、体积小、价格低、精度高、响应速度快、性能稳定等优点,应用更为广泛。
在高分辨率和大量程角速率/位移测量系统中,增量式光电编码器更具优越性。
绝对式编码器能直接给出对应于每个转角的数字信息,便于计算机处理,但当进给数大于一转时,须作特别处理,而且必须用减速齿轮将两个以上的编码器连接起来,组成多级检测装置,使其结构复杂、成本高。
1增量式编码器1.1增量式光电编码器的结构增量式编码器是指随转轴旋转的码盘给出一系列脉冲,然后根据旋转方向用计数器对这些脉冲进行加减计数,以此来表示转过的角位移量。
增量式光电编码器结构示意图如图1所示。
图1增量式光电码盘结构示意图光电码盘与转轴连在一起。
码盘可用玻璃材料制成,表面镀上一层不透光的金属铬,然后在边缘制成向心的透光狭缝。
透光狭缝在码盘圆周上等分,数量从几百条到几千条不等。
这样,整个码盘圆周上就被等分成n个透光的槽。
增量式光电码盘也可用不锈钢薄板制成,然后在圆周边缘切割出均匀分布的透光槽。
1.2增量式编码器的工作原理增量式编码器的工作原理如图2所示。
它由主码盘、鉴向盘、光学系统和光电变换器组成。
在图形的主码盘(光电盘)周边上刻有节距相等的辐射状窄缝,形成均匀分布的透明区和不透明区。
鉴向盘与主码盘平行,并刻有a、b两组透明检测窄缝,它们彼此错开1/4节距,以使A、B两个光电变换器的输出信号在相位上相差90°。
工作时,鉴向盘静止不动,主码盘与转轴一起转动,光源发出的光投射到主码盘与鉴向盘上。
当主码盘上的不透明区正好与鉴向盘上的透明窄缝对齐时,光线被全部遮住,光电变换器输出电压为最小;当主码盘上的透明区正好与鉴向盘上的透明窄缝对齐时,光线全部通过,光电变换器输出电压为最大。

光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
1、生产布料的车间用图所示的装置来检测和控制布料卷取过程中的松紧程度。
请分析填空。
图差动变压器式张力检测控制系统1 —变速传送电动机2 —传动辊3 —导向辊4 —张力辊5 —衔铁6 —砝码7 —卷取辊 8 —布料 9 —伺服电动机当卷取辊转动太快时,布料的张力将 _________ (增大 / 减小)。
导致张力辊向 ________ (上 / 下)位移。
使差动变压器的衔铁不再处于中间位置。
N 21 与N 1 之间的互感量M 1 _______ (增加 / 减小),N 22 与N 1 的互感量M 2 _______ 。
因此U 21 ______ (增大 / 减小),U 22 ______ ,经差动检波之后的U o 为 ______ (负 / 正)值,去控制伺服电动机,使它的转速变______ (快 / 慢),从而使张力恒定。
2、左图所示为一人体身高和体重测量装置外观,右图所示为测量身高的传动机构简图,请分析填空并列式计算。
图测量身高的传动机构简图a )测量装置外观b )传动机构简图1 —底座2 —标杆3 —原点4 —立柱5 —皮带轮6 —传动带7 —电动机8 —光电编码器1 )测量体重的荷重传感器应该选择 _____________ 。
该传感器应安装在部位。
2 )设传动轮的减速比为 1 : 5 (即D 1 :D 2 =1 : 5 ),则电动机每转一圈,皮带轮转了 ________ 圈。
3 )在身高测量中,若光电编码器的参数为 1024p / r ,则电动机每转动一圈,光电编码器产生 _________ 个脉冲。
4 )设皮带轮的直径 D=0.1592m ,则皮带轮每转一圈,标杆上升或下降 m 。
电动机每转一圈,标杆上升或下降 _______________m 。
每测得一个光电编码器产生的脉冲,就说明标杆上升或 ___________________m 。
5) 设标杆原位(基准位置)距踏脚平面的高度h 0 =2.2m ,当标杆从图中的原位下移碰到人的头部时,共测得 5120 个脉冲,则标杆位移了______________________m ,该人的身高h =___________________m 。
光电编码器基础知识1.1 概述光电编码器是一种集光、机、电为一体的数字化检测装置,它具有分辨率高、精度高、结构简单、体积小、使用可靠、易于维护、性价比高等优点。
近10几年来,发展为一种成熟的多规格、高性能的系列工业化产品,在数控机床、机器人、雷达、光电经纬仪、地面指挥仪、高精度闭环调速系统、伺服系统等诸多领域中得到了广泛的应用。
光电编码器可以定义为:一种通过光电转换,将输至轴上的机械、几何位移量转换成脉冲或数字量的传感器,它主要用于速度或位置(角度)的检测。
典型的光电编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
一般来说,根据光电编码器产生脉冲的方式不同,可以分为增量式、绝对式以及复合式三大类。
按编码器运动部件的运动方式来分,可以分为旋转式和直线式两种。
由于直线式运动可以借助机械连接转变为旋转式运动,反之亦然。
因此,只有在那些结构形式和运动方式都有利于使用直线式光电编码器的场合才予使用。
旋转式光电编码器容易做成全封闭型式,易于实现小型化,传感长度较长,具有较长的环境适用能力,因而在实际工业生产中得到广泛的应用,在本书中主要针对旋转式光电编码器,如不特别说明,所提到的光电编码器则指旋转式光电编码器。
1.2 增量式光电编码器1.2.1 原理及其结构增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。
它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。
一般来说,增量式光电编码器输出A、B两相互差电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。
习题3 光电编码器
一. 判断下列说法的对错,并将错的地方改正。
1. ( )手轮(MPG )实际上是编码器。
2、( )增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,脉冲数越多,分辨率越高。
3( )在数控车床上加工螺纹,主轴编码器起到了主轴转动与进给运动的联系作用。
4、( )半闭环和全闭环位置反馈系统的根本差别在于位置传感器安装的位置不同,半闭环的位置传感器安装在工作台上,全闭环的位置传感器安装在电机的轴上。
5、( )检测元件的作用是检测位移和速度的实际值,并向数控装置或伺服装置发送反馈信号,从而构成闭环控制。
6.( )接触式码盘属于绝对式的检测方式。
7.( )对于接触式码盘来说,码道的圈数越多,则其所能分辨的角度越小,测量精度越高。
8.( )绝对式(absolute )光电码盘与增量式(incremental )光电码盘结构相似。
9.( )光电脉冲编码器既可以测量位置,又可以测量速度。
二. 填充,以完成下列各表述。
1. 半闭环控制系统常以 为反馈元件。
2. 在一台制造精度良好的闭环数控机床上,机床的定位精度主要取决于 的精度。
3. 测量装置的倍频电路的作用是 。
4.下图说明 。
图3-1-1 旋转编码器 图3-1-2 旋转编码器结构原理图
图3-1-3 手摇脉冲发生器
3、检测脉冲当量要达到0.001mm,至少位的绝对编码器。
5. 选择编码器时根据。
6. 刀架编码器是绝对式的光电编码器,它用于数控机床的旋转刀架上,控制刀具的工位,可以自动换刀。
下表是12工位的刀架编码器输出正逻辑真值表。
请按标号顺序完成横线部分。
工位数 1 2 3 4 5 6 7 8 9 10 11 12
20 1 0 1 0 1 0 1 0 1 0 1 0
21 0 1 1 0 0 1 1 0 0 1 0
22 0 0 0 1 1 1 1 0 0 0 1
23 0 0 0 0 0 0 0 1 1 1 1 1
奇偶校验 1 1 0 1 0 0 1 1 0 0 0
选通信号 1 1 1 1 1 1 1 1 1 1 1 1
7. 增量型编码器通常有三路信号输出(差分有六路信号):
A,B和Z,A脉冲在前,B脉冲在后,A,B脉冲相差
度,每圈发出一个Z脉冲,可作为。
一般利
用A超前B或B超前A进行。
8. 某主轴外装定向编码器为1024脉冲/转,通过4倍频电
路,主轴每转为脉冲,主轴位置检测单位
为。
图3-1-3 旋转编码器输出信号9.某机床采用的增量式的编码器的分辨力为0.01mm/脉冲,
则工作台每移动0.01mm,检测装置便发出一个脉冲,当计数为2000个脉冲时,此时伺服
电动机正好旋转2周,则这台机床所用的传动丝杠的螺距为mm。
10. 一个数控系统中,如果把CNC装置比作人的大脑,把伺服控制装置比作四肢,则位置传感器相当于人的。
三. 选择正确的答案。
1.数控机床常用的直线位移直接测量装置是。
A. 光电旋转编码器
B. 旋转变压器
C. 直线光栅尺(linear scale)
2. 增量式脉冲编码器(pulse encoder)输出的A、B两相,其相位差为90o,它的作用是。
A. 用于细分
B. 提高可靠性
C. 判别旋向
3. 数字式位置检测装置的输出信号是。
A. 电脉冲
B. 电流量
C. 电压量
4. 有一增量脉冲编码器为2000线,那么它的Z相输出为。
A. 1脉冲/转
B. 2000脉冲/转
C. 8000脉冲/转
5. 闭环和半闭环系统在结构上的主要区别是。
A. 采用的驱动电机不同
B. 位置检测元件的安装位置不同
C. 速度检测元件的安装位置不同
6. 对一个16位的绝对式脉冲编码盘而言,它能测出的最小角位移为。
A、11.25º
B、0.196º
C、0.0055º
7.一增量式脉冲发生器每转输出脉冲数为5000,如果单次脉冲的脉冲宽度不能小于6微秒,
则该脉冲发生器最高允许的转速为。
A.1000转/分
B.2000转/分
C.4000转/分
D.120000转/分
8. 数控机床加工过程中,“恒线速切削控制”的目的是
A.保持主轴转速的恒定
B.保持进给速度的恒定
C.保持切削速度的恒定
D.保持金属切除率的恒定
9. 编码器的四线连接(A、A-、B、B-)通常是。
A.伺服电机编码器 B. 手摇脉冲发生器 C. 单向计数器
10、某机床不能进行螺纹切削,应检查
A. 主轴位置编码器
B. 接近开关
C. 进给倍率开关
5 ,现12、增量式脉冲发生器,其单个(又称单次)脉冲的典型脉冲周期(又称宽度)为S
要求其最高允许测量转速为4000r/min,请选择每转脉冲数。
A.2000
B.3000
C.4000
D.5000
12. 在增量式光电码盘测量系统中,使光栏板的两个夹缝距离比码盘两个夹缝之间的距离小1/4节距,使两个光敏元件的输出信号相差1/2相位,目的是。
A.测量被检工作轴的回转角度
B.测量被检工作轴的转速
C.测量被检工作轴的旋转方向
编码器的四线连接(A、A-、B、B-)通常是 B 。
A.伺服电机编码器 B. 手摇脉冲发生器 C. 单向计数器
6. Which of the following code discs is used for incremental encoders?
A. B.
7. The is used as the position detector in a CNC machine tool.
A. relay
B. pulse encoder
C. tape reader
四. 按要求回答问题或完成作业。
1. 编码器的六脉冲信号是什么?分别起什么作用?画出六脉冲信号图。
2. 简述编码器在数控机床中的应用。
4. 有一与伺服电动机同轴安装的光电编码器,指标为1024脉冲/转,该伺服电动机与螺距为6mm的滚珠丝杠通过联轴器直连,在位置控制伺服中断4ms内,光电编码器输出脉冲信号经4倍频处理后,共计脉冲数为0.5K(1K=1024)。
问:
(1)工作台位移了多少?
(2)伺服电动机的转速为多少?
(3)伺服电动机的旋转方向是怎样判别的?。