DCS自动控制系统
- 格式:pptx
- 大小:677.93 KB
- 文档页数:45


DCS是化工厂的自动控制系统,根据采集现场仪表(温度、压力、流量、液位等)的信号,做出判断,输出信号对管道的阀门进行控制,可以人工给值进行阀门控制。
一般化工厂的操作工分现场和DCS控制室两部分,现场的主要是巡检,打开手动阀门,查看状态等工作,控制室的人员就是设置工艺的参数,对整个装置进行监控,根据需要操作DCS系统上的阀门开度,保证物料能在整个装置中按工艺的设计运行。
DCS操作工也称为中控操作工。
DCS系统是一个化工厂的大脑,操作工就是控制现场运行的,工作环境优越,但是脑力劳动强度较大,责任较大。
主要工作是控制现场生产运行,调优运行参数,系统装置的开、停车
DCS叫做大型工程控制的集散系统。
就是把化工过去需要现场操作的阀门,用以压缩空气控制的自动阀替代在中央控制室进行开大或关小的操作。
另外,现场的压力、温度、流量、振动、位移等都用自动化仪表进行采集,送到中控室给操作者进行参照。
一个学计算机专业的,对于如何操作电脑,没有任何困难。
但他需要进行化工基础知识的学习,以及从事专业流程的学习。
主要工作就是通过计算机来控制化工生产所涉及的管道、设备等关键点的温度、流量、压力等工艺参数,来最终生产合格产品。
一般都有操作规程,严格执行即可。
DCS控制系统介绍
DCS控制系统(Distributed Control System,简称DCS)是一种基于现代技术的集散控制系统,它主要应用于工业生产和制造领域,用于控制和监控生产过程中各项参数和设备,以实现自动化生产。
DCS控制系统由多个分布在各个生产单元的控制器组成,这些控制器之间通过网络进行信息传输和数据交换,实现对整个生产过程的控制和监控。
每个控制器负责管理一定范围的生产设备和参数,通过与传感器、执行器等设备连接,实现对生产过程的监测和控制。
DCS控制系统的核心是集中管理系统,它由工程师对整个生产系统进行规划、设计和编程,定义各种控制策略和逻辑,以实现生产过程的自动化控制。
集中管理系统可以实时监测各个控制器的运行状态,收集和处理生产数据,为决策提供支持,确保生产过程的顺利进行。
DCS控制系统的分散控制器通常由工控机或PLC等硬件组成,它们负责执行集中管理系统下发的控制策略,控制各种生产设备的运行和参数调节。
分散控制器之间可以相互通信,实现对整个生产过程的协调与同步,提高生产效率和质量。
DCS控制系统具有高可靠性和稳定性,通过采用冗余设计和故障恢复机制,可以保证系统在出现故障时快速恢复,确保生产过程的连续性和稳定性。
同时,DCS系统可以对生产过程进行实时监测和报警,及时发现并解决问题,保证生产过程的安全性和可靠性。
总的来说,DCS控制系统是一种先进的生产自动化控制系统,具有集中管理、分散控制、多任务处理、模块化设计和高可靠性等特点,可以满
足各种工业生产领域的自动化控制需求,提高生产效率,节约成本,保证生产质量,是工业生产自动化的重要技术手段。

DCS系统安装及调试及方案DCS(分散控制系统)是一种基于工业控制的自动化系统,用于监控和控制生产过程中的各个部分。
安装和调试DCS系统是确保生产过程稳定运行的重要环节之一、下面是一个DCS系统安装和调试的方案,详细说明了各个步骤和工作内容。
1.设计和规划:在开始安装和调试DCS系统之前,需要进行系统设计和规划。
这包括确定所需的硬件设备和软件系统,确定系统的拓扑结构和布置位置,以及制定详细的工作计划和时间表。
2.硬件安装:安装DCS系统的第一步是安装所需的硬件设备。
这包括安装机架、控制器、输入/输出模块、通信接口等。
同时,还需要进行必要的布线和连接工作,确保硬件设备之间可以正常通信和传输数据。
3.软件安装:安装好硬件设备之后,需要安装DCS系统的软件。
这包括安装控制软件、监控软件、数据库管理软件等。
在安装软件之前,需要确保硬件设备已经连接好,并且满足软件系统的要求。
4.网络配置:将DCS系统连接到生产线网络是非常重要的一步,因为它将影响到系统的稳定性和性能。
需要进行网络配置,包括设置IP地址、子网掩码、网关等。
同时,还需要进行网络测试,确保系统可以正常连接和通信。
5.参数设置:DCS系统的参数设置是调试工作的关键环节之一、根据生产过程的需要,需要对系统进行参数设置和调整,包括输入/输出信号的范围、报警和故障处理方式、控制策略等。
同时,还需要进行相关的校准和测试,确保系统的准确性和可靠性。
6.联调测试:完成参数设置之后,需要进行系统的联调测试。
这包括测试各个硬件设备之间的通信和数据传输,以及测试控制策略的有效性和稳定性。
同时,还需要测试系统对不同工况的响应能力和鲁棒性,以及对异常情况的处理能力。
7.性能优化:根据实际情况,对DCS系统进行性能优化。
这包括对实时控制算法的优化、网络通信延迟的优化、数据存储和查询的优化等。
通过性能优化,可以提高系统的响应速度、降低通信延迟和提高数据处理能力。
8.文档编制:在完成DCS系统安装和调试之后,需要编制相关的文档。
dcs系统工作原理和组成DCS系统(分布式控制系统)是一种用于监控和控制工业过程的自动化系统。
它由多个分布在不同位置的控制器组成,通过网络连接进行通信和协调工作。
以下是DCS系统的工作原理和组成:1. 工作原理:- 数据采集:DCS系统通过各种传感器和仪器采集工业过程中的各种数据,如温度、压力、液位等。
- 数据传输:采集到的数据被发送到控制器或主服务器,可以通过有线或无线网络进行传输。
- 数据处理:控制器或主服务器对接收到的数据进行处理和分析,生成相应的控制策略和参数。
- 控制指令生成:根据控制策略和参数,系统生成相应的控制指令,如调节阀门开度、启动或停止设备等。
- 控制执行:控制指令被发送到相应的执行机构,如阀门、电机等,控制工业过程的运行状态。
- 监测和反馈:DCS系统能够实时监测工业过程的运行状态,并采集反馈数据。
这些数据可以用于调整控制策略和参数。
2. 组成:- 控制器(Controller):是DCS系统的核心部分,通常由多个控制模块组成,用于数据处理、控制算法运算和控制指令生成等功能。
- 输入/输出模块(I/O Module):负责与传感器和执行机构进行数据交互,将采集到的数据传输给控制器,同时将控制指令发送到执行机构。
- 人机界面(Human Machine Interface,HMI):包括计算机、显示器、触摸屏等设备,用于操作和监控DCS系统,向操作人员提供过程状态信息和控制界面。
- 通信网络:用于连接控制器、I/O模块和人机界面,实现数据传输和系统通信功能。
- 数据存储与处理系统:用于存储和处理采集到的数据,提供历史数据查询、报表生成等功能。
- 供电系统:为DCS系统提供电源,保证系统的正常运行。
综上所述,DCS系统通过采集工业过程的数据,并通过控制器进行处理、生成控制指令和协调执行机构,实现对工业过程的监控和控制。
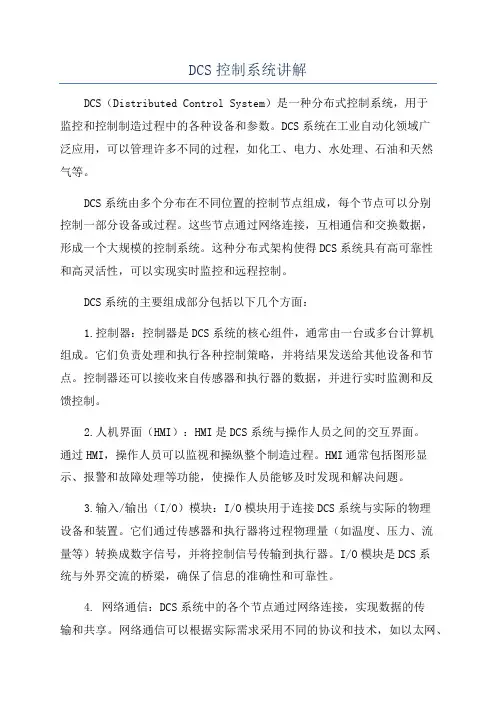
DCS控制系统讲解DCS(Distributed Control System)是一种分布式控制系统,用于监控和控制制造过程中的各种设备和参数。
DCS系统在工业自动化领域广泛应用,可以管理许多不同的过程,如化工、电力、水处理、石油和天然气等。
DCS系统由多个分布在不同位置的控制节点组成,每个节点可以分别控制一部分设备或过程。
这些节点通过网络连接,互相通信和交换数据,形成一个大规模的控制系统。
这种分布式架构使得DCS系统具有高可靠性和高灵活性,可以实现实时监控和远程控制。
DCS系统的主要组成部分包括以下几个方面:1.控制器:控制器是DCS系统的核心组件,通常由一台或多台计算机组成。
它们负责处理和执行各种控制策略,并将结果发送给其他设备和节点。
控制器还可以接收来自传感器和执行器的数据,并进行实时监测和反馈控制。
2.人机界面(HMI):HMI是DCS系统与操作人员之间的交互界面。
通过HMI,操作人员可以监视和操纵整个制造过程。
HMI通常包括图形显示、报警和故障处理等功能,使操作人员能够及时发现和解决问题。
3.输入/输出(I/O)模块:I/O模块用于连接DCS系统与实际的物理设备和装置。
它们通过传感器和执行器将过程物理量(如温度、压力、流量等)转换成数字信号,并将控制信号传输到执行器。
I/O模块是DCS系统与外界交流的桥梁,确保了信息的准确性和可靠性。
4. 网络通信:DCS系统中的各个节点通过网络连接,实现数据的传输和共享。
网络通信可以根据实际需求采用不同的协议和技术,如以太网、Profibus、Modbus等。
这些网络使得DCS系统具有分布式控制和集中监控的能力。
5.数据存储和处理:DCS系统需要对大量的数据进行存储和处理。
这些数据包括控制参数、过程状态、历史记录等。
数据存储和处理功能可以在DCS系统中实现,也可以通过连接外部数据库和服务器来实现。
DCS系统的工作原理基于控制算法和策略。
控制算法通常是根据过程的特点和需求进行设计和优化的。

自动化控制系统DCS安全操作规程DCS(分布式控制系统)是一种应用于工业控制领域的自动化系统,它通过多个分布式控制器和传感器来实现对生产过程的监控和控制。
在使用DCS进行工业生产时,安全操作是至关重要的,下面将为您介绍一份DCS安全操作规程,以确保工作人员的安全以及生产过程的稳定性。
1. 安全意识教育培训所有参与DCS操作的工作人员都必须经过安全意识教育培训,了解DCS系统的基本原理、操作方法以及遇到异常情况时的应急处理措施。
2. 严格遵守操作流程操作人员在进行DCS操作时必须严格按照操作流程进行,不得随意更改操作参数或跳过某个步骤。
操作流程应包括系统启动与关闭、参数设定、报警处理等内容。
3. 确认设备状态正常在操作前,操作人员必须确认所需的设备、传感器等都处于正常工作状态。
如有异常情况,要及时报修并等待维修人员处理完毕后再进行操作。
4. 控制参数设定在设定控制参数时,操作人员要遵循工艺要求,确保设定参数合理,并进行适当的范围限制,避免参数值过大或过小造成潜在风险。
5. 报警处理当DCS系统发生报警时,操作人员应立即停止当前操作,并查看报警信息,了解报警的原因和紧急程度。
对于高级别的报警,应及时向上级报告并按照应急措施进行处理。
6. 设备维护保养DCS系统的设备和传感器需要定期进行维护保养,以确保其正常工作。
操作人员应按照维护计划进行设备的检查、清洁和更换工作,并及时记录维护情况。
7. 数据备份与恢复操作人员应定期进行DCS系统的数据备份,并确保备份数据完整可靠。
在系统发生故障或数据丢失时,应能够及时进行数据恢复,避免对生产过程造成重大影响。
8. 紧急情况处理针对可能出现的紧急情况,操作人员应事先制定应急处理方案,并进行演练。
在紧急情况发生时,要立即按照预定方案进行处置,保证工作人员和设备的安全。
9. 记录与分析在DCS操作过程中,操作人员应及时记录操作参数、报警信息、维护情况等重要数据,并进行分析,以发现潜在问题,并及时采取改进措施。
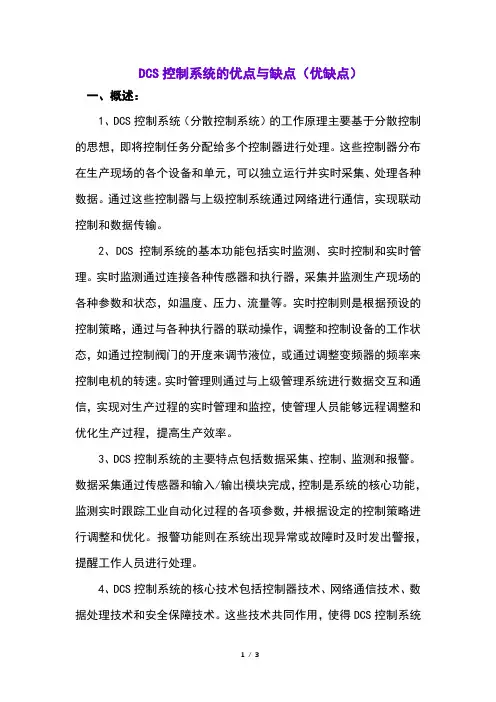
DCS控制系统的优点与缺点(优缺点)一、概述:1、DCS控制系统(分散控制系统)的工作原理主要基于分散控制的思想,即将控制任务分配给多个控制器进行处理。
这些控制器分布在生产现场的各个设备和单元,可以独立运行并实时采集、处理各种数据。
通过这些控制器与上级控制系统通过网络进行通信,实现联动控制和数据传输。
2、DCS控制系统的基本功能包括实时监测、实时控制和实时管理。
实时监测通过连接各种传感器和执行器,采集并监测生产现场的各种参数和状态,如温度、压力、流量等。
实时控制则是根据预设的控制策略,通过与各种执行器的联动操作,调整和控制设备的工作状态,如通过控制阀门的开度来调节液位,或通过调整变频器的频率来控制电机的转速。
实时管理则通过与上级管理系统进行数据交互和通信,实现对生产过程的实时管理和监控,使管理人员能够远程调整和优化生产过程,提高生产效率。
3、DCS控制系统的主要特点包括数据采集、控制、监测和报警。
数据采集通过传感器和输入/输出模块完成,控制是系统的核心功能,监测实时跟踪工业自动化过程的各项参数,并根据设定的控制策略进行调整和优化。
报警功能则在系统出现异常或故障时及时发出警报,提醒工作人员进行处理。
4、DCS控制系统的核心技术包括控制器技术、网络通信技术、数据处理技术和安全保障技术。
这些技术共同作用,使得DCS控制系统能够广泛应用于工业自动化生产线、大型设备控制和环保监测与治理等领域。
二、DCS控制系统的优点:1、高可靠性:由于DCS将系统控制功能分散在每台计算机上,系统结构采用容错设计,计算机故障不会导致系统其他功能的丧失。
此外,由于系统中的每台计算机都承担一项任务,因此可以使用具有特定结构和软件的专用计算机来实现所要实现的功能,从而提高系统中每台计算机的可靠性。
2、开放性:DCS采用开放、标准化、模块化、系列化设计。
系统中各计算机采用局域网通信,实现信息传输。
当系统功能需要更改或扩展时,新添加的计算机可以方便地连接到系统通信网络或从系统通信网络中移除,几乎不会影响系统中其他计算机的工作。
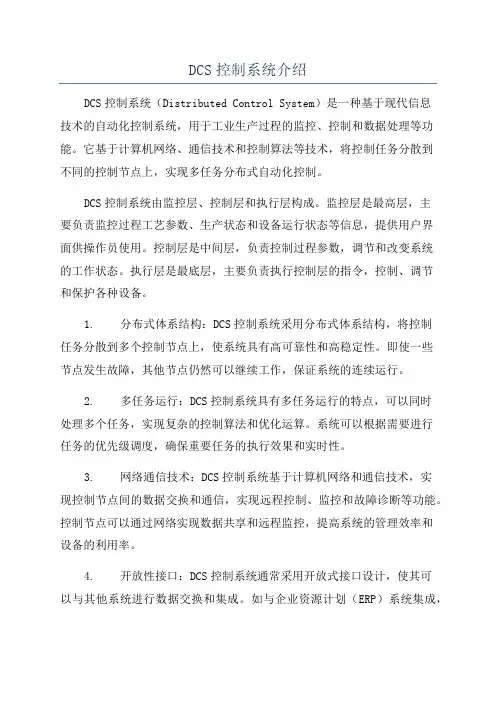
DCS控制系统介绍DCS控制系统(Distributed Control System)是一种基于现代信息技术的自动化控制系统,用于工业生产过程的监控、控制和数据处理等功能。
它基于计算机网络、通信技术和控制算法等技术,将控制任务分散到不同的控制节点上,实现多任务分布式自动化控制。
DCS控制系统由监控层、控制层和执行层构成。
监控层是最高层,主要负责监控过程工艺参数、生产状态和设备运行状态等信息,提供用户界面供操作员使用。
控制层是中间层,负责控制过程参数,调节和改变系统的工作状态。
执行层是最底层,主要负责执行控制层的指令,控制、调节和保护各种设备。
1. 分布式体系结构:DCS控制系统采用分布式体系结构,将控制任务分散到多个控制节点上,使系统具有高可靠性和高稳定性。
即使一些节点发生故障,其他节点仍然可以继续工作,保证系统的连续运行。
2. 多任务运行:DCS控制系统具有多任务运行的特点,可以同时处理多个任务,实现复杂的控制算法和优化运算。
系统可以根据需要进行任务的优先级调度,确保重要任务的执行效果和实时性。
3. 网络通信技术:DCS控制系统基于计算机网络和通信技术,实现控制节点间的数据交换和通信,实现远程控制、监控和故障诊断等功能。
控制节点可以通过网络实现数据共享和远程监控,提高系统的管理效率和设备的利用率。
4. 开放性接口:DCS控制系统通常采用开放式接口设计,使其可以与其他系统进行数据交换和集成。
如与企业资源计划(ERP)系统集成,实现生产计划和物料管理的统一、同时,也可以与其他自动化系统集成,如SCADA系统、MES系统等,实现全面的生产过程控制和管理。
5. 可扩展性:DCS控制系统具有较好的可扩展性,可以根据生产工艺的变化和需求的变化进行扩展和改造。
可以增加新的控制节点,增加新的功能模块,实现对系统的功能和性能的扩展,提高系统的灵活性和适应性。
DCS控制系统在工业生产中有着广泛的应用,包括化工、石油、电力、冶金、食品、制药等行业。
DCS控制系统(DIstributed Control System,分散控制系统)是随着现代大型工业生产自动化的不断兴起和过程控制要求的日益复杂应运而生的综合控制系统。
DCS控制系统基本包括模拟量控制系统(MCS),顺序控制系统(SCS),汽机DEH系统,电气ECS系统,旁路控制系统BCS系统。
DCS控制系统组成模拟量控制系统(MCS),是将汽轮发电机组的锅炉、汽机当作一个整体进行控制的系统,炉侧MCS指锅炉主控制系统、锅炉燃料量控制系统、送风控制系统、引风控制系统、启动分离器储水箱水位控制系统及蒸汽温度控制系统;机侧MCS指除氧器压力、水位调节系统、凝汽器水位调节系统;闭式水箱水位调节系统;高、低加水位调节系统及辅汽压力调节系统等。
MCS担负着生产过程中水、汽、煤、油、风、烟诸系统的主要过程变量的闭环自动调节及整个单元汽轮发电机组的负荷控制任务。
顺序控制系统SCS是将机组的部分操作按热力系统或辅助机械设备划分成若干个局部控制系统,按照事先规定的顺序进行操作,以达到顺序控制的目的。
炉侧顺序控制的范围包括:送风机、引风机、一次风机、空气预热器、炉膛吹灰系统等。
机侧顺序控制系统的范围包括:汽机润滑油系统、凝泵、高加、除氧器、递加、真空泵、轴封系统、循环水系统、闭式水系统、汽泵、电泵、内冷水系统、密封油系统、胶球清洗系统等。
锅炉炉膛安全监控FSSS能在锅炉正常工作和启停等各种运行方式下,连续地密切监视燃烧系统的大量参数和状态,不断地进行逻辑判断和运算,必要时发出动作指令,通过各种顺序控制和连锁装置,使燃烧系统中的有关设备(如磨煤机、给煤机、油枪、火检冷却风机等)严格按照一定的逻辑顺序进行操作或处理未遂事故,以保证锅炉的安全。
同时炉膛安全监控系统还具有燃烧管理功能,它通过对锅炉的各层燃烧器进行投切控制,满足机组启停和增减负荷的需要,对锅炉的运行参数和状态进行连续监视,并自动完成各种操作和保护动作,如紧急切断燃料供应和紧急停炉,以防事故扩大.。
DCS自动控制系统维护检修操作规程一、目的DCS自动控制系统是由自身的软、硬件以及操作台盘及现场仪表(变送器、测量仪表、电缆及执行机构等)组成的有机整体。
避免系统中任何一个环节出现问题导致系统部分功能失效或引发控制系统故障,甚至导致生产停车等事故,维护正常生产。
二、系统组成DCS控制系统由工程师站、操作站、控制站、过程网络组成。
1、工程师站是为专业工程技术人员设计的,内装有相应的组态平台和系统维护工具。
通过系统组态平台生成适合于生产工艺要求的应用系统,具体功能包括:系统生成、数据库结构定义、组态操作、流程图画面组态、报表程序编制等。
2、操作站是由工业PC机、CRT、键盘、鼠标、打印机等组成的人机系统,是操作人员完成过程控制监控管理任务的环境。
3、控制站是系统中直接与现场打交道的I/O处理单元,完成整个工业过程的实时监控功能,控制站可冗余配置。
4、过程控制网络实现工程师站、操作站、控制站的连接,完成信息、控制命令等传输,双重冗余设计。
三、系统日常维护(一)、日常巡检内容:每天必须进行两次以上的巡回检查,检查内容包括:1、向当班工艺人员了解DCS的运行情况;2、查看“故障诊断”画面,检查有无故障现象;4、检查控制室温度及空调运行情况;5、检查控制站机柜及操作柜散热风扇运行情况。
(二)、控制站的定期维护管理及测试:1、控制室与操作室的维护管理(1)、保证控制室及操作室的照明符合要求;(2)、检查操作室与控制室的温度及湿度和空调的运行情况,并应特别注意控制机柜的卡件等电子设备有无出现水珠或凝露现象;(3)、检查有无腐蚀性气体腐蚀设备与过多的粉尘堆积的现象,操作台及控制机柜的风扇滤网应定期拆洗,建议每月更换、拆洗一次;(4)、检查操作室、控制室无电磁干扰情况和振动情况。
2、计算机的维护管理(1)、文明操作,爱护设备,保持清洁,防灰防水;(2)、不可强制性关闭计算机电源;(3)、键盘与鼠标操作须用力恰当,轻拿轻放,避免尖锐物刮伤表面;(4)、显示器应远离热源,保证显示器通风不被他物挡住;(5)、在进行计算机信号电缆、通讯电缆连接或拆除时,请确认计算机电源开关处于“关”状态。
DCS控制系统介绍DCS(Distributed Control System)即分散型控制系统,它是一种用于工业自动化和过程控制的控制系统。
DCS系统具有分布式、模块化和灵活的特点,能够实现对整个生产过程的监控和控制,提高生产效率和产品质量。
DCS系统由硬件和软件两部分组成。
硬件部分包括计算机、控制器、输入和输出设备等,软件部分则是用于控制和监控的程序。
DCS系统可以与各种传感器、执行器和其他设备进行接口,实现对各种参数的测量和控制。
DCS系统的主要特点有如下几点:1.分布式架构:DCS系统采用分布式控制架构,即将控制功能分散到各个子系统中,每个子系统都具有自己的控制器和输入输出设备。
这种架构使得系统更灵活,能够适应不同规模和复杂度的生产过程。
2.模块化设计:DCS系统采用模块化设计,即将控制功能划分为多个独立的模块,每个模块负责一个特定的任务,如温度控制、液位控制等。
这种设计使得系统更易于维护和升级,也提高了系统的可靠性。
3.高性能计算机:DCS系统使用高性能计算机作为控制器,能够快速、准确地处理大量的数据和指令。
这使得系统可以实时地监控和控制生产过程,确保生产的稳定性和高效性。
4.高可靠性:DCS系统具有高可靠性,可以实现冗余和备份,确保在故障情况下的系统稳定运行。
同时,系统还能够实现自动切换和故障诊断,提高了系统的可靠性和容错性。
5. 开放性:DCS系统是一个开放系统,可以与其他系统进行连接和通讯,如MES(Manufacturing Execution System)、ERP(Enterprise Resource Planning)等。
这种开放性使得系统更加灵活,可以实现工厂级别的集成和管理。
DCS系统主要应用于工业生产过程控制,如化工、电力、石油、制药等行业。
它可以实现对生产参数的实时监测和调节,确保产品的质量和安全,提高工艺的稳定性和效率。
总之,DCS控制系统是一种分散型、模块化和灵活的控制系统,能够实现对工业生产过程的监控和控制,提高生产效率和产品质量。
dcs控制系统原理DCS(分布式控制系统)是一种基于计算机网络和现代自动化技术的控制系统,它具有很多独特的原理和特点。
DCS的原理主要包括以下几个方面:1. 分布式控制:DCS系统采用分布式结构,通过将控制功能分散到各个控制单元,使得系统具有更高的可靠性和可扩展性。
每个控制单元负责一个或多个分析控制回路,通过网络连接与其他控制单元进行通信。
2. 实时控制:DCS系统具有实时性能,能够对过程变量进行实时监测和控制。
它能够接收来自各个测量点的数据,并对其进行实时处理和分析,然后根据预设的控制策略进行调整。
实时控制可以确保系统的稳定性和安全性。
3. 联机和离线运行:DCS系统通常会同时支持联机和离线运行模式。
联机模式下,DCS系统能够实时采集和处理过程数据,并进行控制操作。
离线模式下,系统可以进行参数配置、软件升级等操作,而不会影响到过程的正常运行。
4. 数据管理和存储:DCS系统可以对采集到的过程数据进行记录和存储,以便后续分析和查询。
它能够以时间序列的方式存储数据,并通过数据库管理系统进行数据管理。
这样可以方便用户对历史数据进行回放和分析。
5. 故障诊断和报警处理:DCS系统能够对设备故障和异常情况进行诊断,并及时发出报警信号。
它可以实时监测各个设备的状态,并通过与其他系统的接口进行数据交换。
一旦发现异常情况,系统会根据预设的报警策略发出相应的警报,并提供故障诊断的相关信息。
综上所述,DCS控制系统是一种基于分布式结构和现代自动化技术的控制系统。
它具有分布式控制、实时控制、联机和离线运行、数据管理和存储等特点,可以实现对工业过程的全面监测和控制。