基础知识机电控制工程 高钟毓
- 格式:ppt
- 大小:2.24 MB
- 文档页数:20
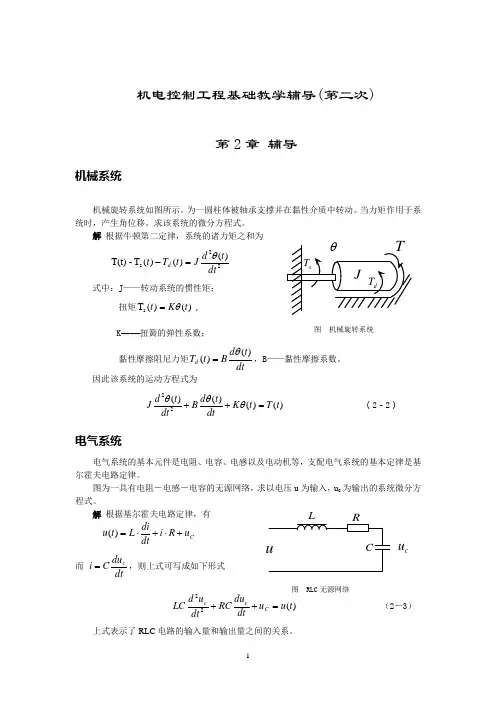
机电控制工程基础教学辅导(第二次)第2章 辅导机械系统机械旋转系统如图所示。
为一圆柱体被轴承支撑并在黏性介质中转动。
当力矩作用于系统时,产生角位移。
求该系统的微分方程式。
解 根据牛顿第二定律,系统的诸力矩之和为22s )()()(T -T (t)dtt d J t T t d θ=- 式中:J ——转动系统的惯性矩;扭矩)()(T s t K t θ=, K ——扭簧的弹性系数; 黏性摩擦阻尼力矩dtt d B t T d )()(θ=,B ——黏性摩擦系数。
因此该系统的运动方程式为)()()()(22t T t K dt t d B dtt d J =++θθθ (2-2) 电气系统电气系统的基本元件是电阻、电容、电感以及电动机等,支配电气系统的基本定律是基尔霍夫电路定律。
图为一具有电阻-电感-电容的无源网络,求以电压u 为输入,u c 为输出的系统微分方程式。
解 根据基尔霍夫电路定律,有 C u R i dtdiL t u +⋅+⋅=)( 而 dtdu Ci c=,则上式可写成如下形式22u dt du RC dt u d LCC cc =++ (2-3)上式表示了RLC 电路的输入量和输出量之间的关系。
编写控制系统微分方程的一般步骤为: (l) 首先确定系统的输入量和输出量;(2) 将系统划分为若干个环节,确定每一环节的输入量和输出量。
确定输入量和输出量时,应使前一环节的输出量是后一环节的输入量。
(3) 写出每一环节(或元件)描述输出信号和输入信号相互关系的运动方程式;找出联系输出量与输入量的内部关系,并确定反映这种内在联系的物理规律。
而这些物理定律的数学表达式就是环节(或元件)的原始方程式。
在此同时再做一些数学上的处理,如非线性函数的线性化。
考虑忽略一些次要因素。
使方程简化的可能性和容许程度。
(4) 消去中间变量,列出各变量间的关系式。
设法消去中间变量,最后得到只包含输入量和输出量的方程式。
试论煤矿机电设备的维修和故障诊断技术摘要:随着科学技术与生产的发展,机械设备工作强度不断增大,生产效率、自动化程度越来越高,同时设备更加复杂,各部分的关联愈加密切,从而往往某处微小故障就爆发链锁反应,导致整个设备乃至与设备有关的环境遭受灾难性的毁坏。
这不仅会造成巨大的经济损失,而且会危及人身安全,后果极为严重。
本文对机电设备的维修和故障检测技术进行分析研究。
关键词:机电设备维修故障检测1、前言机电设备是煤炭企业固定资产中的重要组成部分,是煤炭企业不可缺少的物资基础,设备装备的先进程度和能否合理使用、科学维修和故障检测、适时检修和更新改造、使设备发挥最大的效能,对煤炭企业至关重要。
机电设备的维修和故障检测是全过程的维修和故障检测,以获得寿命周期最经济、设备综合效能最高的目标。
设备维修和故障检测实行检修、改造和更新相结合,经济维修和故障检测技术相结合。
2、机电设备的维修2.1设备维修的必要性机器设备是由各种零部件组成的,由于各种零部件材质不同。
使用的条件不同,它们的磨损和损坏的程度也不同,1台机器设备在使用过程中,由于运转造成有些零部件间的磨损,以及长时间运转造成的有些零部件疲劳和表现,使设备的性能降低,这样就必须通过维护和维修来恢复某些零部件的性能。
1台机器设备由于有形损坏的不均匀性,有些零部件已经磨损而且有些零部件还在正常工作,这样只要将损坏的易损件进行更換和修复,就可以使机器正常运转,恢复其使用性能,比购置1台相同规格的新设备既经济又节省时间。
如1台40t刮板输送机电机,有时由于使用不当造成轴承落架,只要更换轴承就可以恢复原有性能,这样比购买1台新电动机要节省时间,既经济又合理,延长了机器设备的使用寿命。
2.2设备无限循环维修带来的弊端适时的设备维修是必要的,既经济又合理。
但是无止境的长期维修下去,就不合理,也不经济了。
1台机器在长期运转使用中,由于各零部件间产生的摩擦和材质的疲劳和老化导致性能逐渐降低,这种物理变化,通常通过维修来补偿,但是维修也是有限度的,该矿在2002年有sgw-40t刮板输送机107台,配用电动机270台。
目录第一章总体方案设计 (2)1.1任务设计书及指标 (2)1.1.1设计任务书 (2)1.1.2主要技术指标 (2)1.2总体方案确定 (2)1.2.1方案确定思想 (2)1.2.2方案对比分子与确定 (3)第二章机械系统设计 (3)2.1竖直坐标工作台外形尺寸及重量估计 (5)2.2竖直导轨参数确定 (7)2.3滚珠丝杠计算和选择 (7)2.3.1 滚珠丝杠强度计算 (8)2.3.2 滚珠丝杠传动效率计算 (8)2.4伺服电机的计算与选取 (8)2.4.1 等效转动惯量的计算 (11)2.4.2 伺服电机等效负载转矩的计算 (11)2.4.3 伺服电机的选型 (12)2.5 联轴器的选用 (13)参考文献 (13)第一章 总体方案设计1.1任务设计书及指标1.1.1设计任务书题目:两维工作台(步进电机+滚珠丝杠+Y 向可加减速器方案)结构设计任务:本项目要求的两维工作台为竖直平面内的X-Y 工作台,其中Y 向为竖直,X 向为水平,电动工作方式。
1.1.2主要技术指标1)工作台台面尺寸:X 向200mm ,Y 向200mm ,台面要求沿均匀布置同心圆上分布圆间隔30mm 的M6螺孔(螺孔深度不小于15mm ),中心须有20mm 定心圆孔。
2)工作台承载:载荷重量50Kg 。
3)行程要求:X 向500mm ,Y 向1000mm 。
4)位置定位精度:X 向0.1mm ,Y 向0.05mm 。
5)最大运动精度:X 向0.1m/s ,Y 向0.2m/s 。
1.2总体方案确定根据设计任务书的要求确定总体方案。
1.2.1方案确定思想两坐标数控工作台台体设计主要分为机械系统部件和台体上的测控部件。
机械系统部件又分为导轨组成,传动组成,减速装置等;测控部件又分为伺服电机,检测及反馈元件等等。
1) 工作台型号为HXY-2020; 2) 行程要求X=200mm ,Y=200mm ;3) 工作台面尺寸为C ×B ×H=270×250×18; 4) 底座外形尺寸为C ×B ×H=1000×25×840; 5) 工作台最大长度为1000mm ; 6) 工作台负载重量为N=500N ;7) 工作台最快移动速度max max 0.2/;x y v v m s ==8)X,Y方向的定位精度为0.05mm;9)工作台负载小,运动灵敏度高,低速;10)定位精度高;11)考虑到结构稳定,安全,建议基座和滑台采用铸造工艺。
第一部分大纲说明1. 课程性质与任务课程性质:本课程是中央广播电视大学机械设计制造及其自动化专业的一门必修专业基础课程。
课程任务:通过本课程的教学和实践,使学生掌握自动控制的基本理论、自动控制系统校正及设计基本方法,全面培养学生分析系统、设计系统的能力,使学生在面对实际问题时,能够站在系统的、全局的高度来思考。
2.本课程与相关课程的关系先修课:微积分初步、C语言程序设计、电路分析基础等。
后续课:计算机控制技术、机电一体化系统设计基础、信号处理原理等。
3.课程的教学基本要求(1)了解自动控制系统的基本概念,区分开环与闭环控制系统;(2)能够熟练建立机电系统的微分方程、传递函数这两种形式的数学模型,掌握系统复杂动态结构图的化简;(3)理解系统时域分析的基本概念,熟练求解一阶和二阶系统的响应,深刻理解系统稳定性的基本概念,掌握Routh稳定性判据的基本思想,熟练求解系统的稳态误差;(4)深刻理解频率法的基本概念,熟练掌握典型环节频率特性的绘制方法,重点掌握系统暂态特性和开环频率特性的关系;(5)掌握典型系统根轨迹的绘制原则;(6)理解控制系统校正的一般概念,熟练掌握系统的串联校正、并联校正和前馈校正等补偿方法。
4.教学方法和数学形式建议本课程是一门理论性和实践性都很强的课程,涉及面较宽,所以要强调利用多种教学手段,完成大纲要求。
课程教学形式建议以课堂讲授为生,辅助实践环节的训练,并通过课后练习和自学加强对所学知识的理解。
有条件时可进行网上教学。
课堂讲授(1)建议利用电子教案或课件,结合板书授课,这样既可增大信息量又使学生思路跟得上教师的讲课进度;(2)建议结合学生专业特点,多举一些应用实例,在讲授知识的同时,着重讲授提出问题、解决问题的方法。
也可以引进课上讨论分析的手段,提高学生的参与度,但设计的问题要合适、明确、有趣;(3)建议在讲授基本知识点、基本要求的同时,结合计算机应用技术的发展,给学生介绍一些相关的新型知识、技术、典型产品等。

基础知识机电控制工程教学课件 (一)随着现代科技的不断发展,机电一体化技术在工业领域拥有着广泛的应用。
为了培养和培训相关技术人才,高校机电控制工程专业的课程设置备受关注。
对于教学过程而言,基础知识机电控制工程教学课件的编制则显得至关重要。
本文将从三个方面探讨如何编写基础知识机电控制工程教学课件。
一、基础知识课程重点基础知识机电控制工程课程主要包括电机原理、电子技术、自动控制等方面的内容。
此外,还需要学习相关的机器人技术及控制方法。
在编写基础知识课程时,应该注重内容的全面性和连贯性,帮助学生掌握课程的重点和难点。
二、课件的制作要点基础知识机电控制工程教学课件的制作应遵循以下要点:1、采用合适的课件制作工具,以便课件的幻灯片制作、课件内容编辑、课件演示等操作更加方便。
2、注意课件内容质量,内容的衔接自然,思路清晰,让学生更好地掌握课堂知识。
3、课件的文字、图片、视频以及动画等资源应选择合适的例子和样本,向学生提供良好的学习资源和生动形象的案例。
4、根据学生的认知水平,合理安排教学内容和难度,以达到课程的效果。
五、课程实践要求基础知识机电控制工程课程并不是只需要掌握理论知识,还需要实际操作和独立解决问题。
课程实践是基础知识机电控制工程教学的一部分,设计一些机电控制系统模块进行实际操控和模拟,让学生能够运用所学知识解决实际问题。
综上所述,编制基础知识机电控制工程教学课件是一项非常重要的任务,需要注重课件制作的完整性和连贯性,课程的难度和整体体系的协调性。
通过对机电控制的基础知识的学习和课程实践的深入研究,可以更好地帮助学生培养掌握相关机电技术和控制技能的能力。
![[工学]《机电设备电气控制技术--基础知识》教案](https://uimg.taocdn.com/ed714d4d1ed9ad51f01df276.webp)
教案在某些要求调速范围大、速度高、精密度好、控制性能优异的场合,直流电动机现占有较大的比重。
如:矿场卷扬机、厢轿式高速电梯、城市电车、地铁列车、电动自行车等等。
直流发电机主要用作直流电源,如直流电动机的电源,直流电焊机电源等。
二、直流电机的基本结构教案教案教案教案从图1-21可以看到,当电枢回路串入电阻性的斜率 将增大,电动机和负载的机械特性的交点将下移,即电动机稳定运行转速降低。
如图1-21中串入的电阻值 点A 1的转速n 1,它们都比原来没有外串电阻的交点电枢回路串接电阻调速方法的优点是设备简单,调速范围小,电枢回路串入电阻后电动机的机械特性变“软”,负载变动时电动机产生较大的转速变化,速效率较低。
3、弱磁调速保持他励直流电动机电枢电源电压不变,电枢回路也不串接电阻,在电动机拖动负载转矩不很大(小于额定转矩)机的励磁磁通,可使电动机转速升高。
载时弱磁调速,如图1-22所示。
图1-222T e C C Na R R Φβ+=12R R >改变电枢电源电压调速时,电动机机械特性的即使电动机在低速运行时,转速随负载变动而变化的幅度较小,转速稳定性好。
当电枢电源电压连续调节时,所以这种调速称为无级调速。
改变电枢电源电压调速方法的优点是调速平滑性好,调速,调速效率高,转速稳定性好,缺点是所需的可调压电源设备投资较高。
这种调速方法在直流电力拖动系统中被广泛应用。
在实际电力拖动系统中,可以将几种调速方法结合起来,这样,以得到较宽的调速范围,电动机可以在调速范围之内的任何转速上教案流为教案教案图1-- 1 单相变压器工作原理图三、变压器的分类教案图1.5 单相变压器空载运行原理图 图1.7 单相变压器负载运行原理图主磁通:绝大部分的磁通经由铁心闭合,称为主磁通,用m Φ 表示。
作用:主磁通与原、副绕组同时交链而传递能量。
在原、副绕组中产生感应电动势1e ,2e 。
教案教案教案教案。
一种基于干扰观测器的重复控制解耦方法赵钢;刘娟【摘要】A kind of repetitive control technique based on disturbance observer is proposed for the three-axis turntable dynamics decoupling, starting from the analysis of the velocity coupling and torque coupling to establish a dynamic differential equations. The disturbance observer works as a feedback controller to compensate for the effects of dynamic coupling, providing certain robustness. In order to inhibit the coupling interference, a repetitive controller is added, making the system better robust performance. The simulation results show that the coupling to inhibit the effectiveness of the strategy, indicating that the turntable can meet the system location accuracy requirements.%针对某型号的三轴转台,从分析速度耦合及力矩耦合出发建立了三轴转台动力学微分方程,提出了一种基于干扰观测器及重复控制技术的三轴转台动力学解耦方法.干扰观测器作为反馈控制器补偿了动力学耦合的影响,为系统提供了一定的鲁棒性.为了更彻底的抑制耦合干扰,增设了重复控制器,使系统获得更好的鲁棒性能.仿真结果证明了该耦合抑制策略的有效性,表明了转台可以满足系统位置精确度要求.【期刊名称】《哈尔滨理工大学学报》【年(卷),期】2012(017)006【总页数】5页(P25-29)【关键词】三轴转台;解耦;干扰观测器;重复控制;鲁棒性能【作者】赵钢;刘娟【作者单位】天津理工大学自动化学院,天津市复杂控制理论与应用重点实验室,天津300384;天津理工大学自动化学院,天津市复杂控制理论与应用重点实验室,天津300384【正文语种】中文【中图分类】TP2730 引言随着航空航天技术的飞速发展,对惯性导航系统的精确度要求越来越高,因此迫切需要研制出惯性导航元件检测设备即转台.然而在转台的三框之间存在着非线性耦合关系,它们相互影响[1],严重时会对系统的性能产生直接影响.为了满足三轴转台高精确度的要求,必须对三轴转台进行解耦研究.许多文献从不同角度对三轴转台解耦问题进行了分析研究,提出了如状态反馈与动态补偿法[2],二阶系统反馈解耦法[3],速度内反馈解耦法[4],鲁棒补偿解耦法[5]等.这些方法首先均对三轴转台建立了动力学方程,不同的是,文[2]中首先采用逆系统理论证明系统的可解耦性,然后运用状态反馈与动态补偿的方法将系统转化为零耦合的线性系统;文[3]中将多输入多输出的二阶转台系统转化为无阻尼、无刚度的惯性系统;速度内反馈法通过高开环增益削弱速度环其对框体运动速度的影响,保证位置环的跟踪精确度;鲁棒补偿法通过设计由干扰观测器与低通滤波器组成的动态解耦鲁棒补偿控制器检测和补偿耦合干扰.本文提出了一种基于干扰观测器及重复控制技术的三轴转台动力学解耦方法.1 三轴转台动力学微分方程的建立通过对三轴转台内、中、外三框的速度耦合及力矩耦合的分析,并根据动量矩定理的推导,最终可以得到三轴转台的动力学方程为[2]:本文所研究的某型三轴转台其框架相对于固联坐标系的转动惯量为该三轴转台系统所使用的电机为直流力矩电机,电机型号及参数如下:表1 电机型号及参数参数型号峰值堵转电压/V 电流/A 转矩/(N·m)最大空载转速/(r/min)电枢电感/mH 电阻/Ω 转动惯量/(kg·m2)J215LYX03D 60 5.5 24 110 11.2 19 0.038 J250LYX05C 60 8 60 63 7.1 17.2 0.08 J275LYX04B 60 9.6 85 58 6.24 18.7 0.18由文[6]可知,控制电压与电机输出力矩的线性关系为其中Kt为电机的转矩系数,经过计算可得三个型号的电机转矩系数分别为4.36、7.5、8.86 N·m/A.将电机数据分别代入式(4)中,并联合式(1)~(3),经过转换可以得到如下方程组:设,则用微分方程表示本系统为从(5)~(7)可以看出,该系统是一个3输入3输出的非线性系统,包含复杂的耦合关系.解耦设计成为了设计出高性能控制系统的必要步骤.2 干扰观测器的结构与设计干扰观测器(disturbance observer-DOB)的基本思想是:把实际系统输出与标称模型输出的差值应用于标称模型,估计出等效的干扰,并将其作为补偿信号反馈到输入端[7].图1 干扰观测器的初始结构图中Gp(s)为实际对象的传递函数,Gn(s)为标称模型,u为系统的外部输入,d为外部干扰,d^为d的估计值,即观测到的干扰.对于实际的物理系统,Gn(s)的相对阶不为零,其逆在物理上不可实现;实际对象Gp(s)的精确数学模型亦无法确定;而且实际系统由于受到测量噪声的影响,该方法的控制性能也会受到影响.鉴于此,我们在等效干扰后串入一个低通滤波器,如图2所示,从而改善Gn(s)的相对阶不为零所带来的问题.图2 改进后的干扰观测器结构图由图2可以得到:取低通滤波器Q(s)的频带为fq,则有当f≤fq,Q≈1,Guy(s)≈Gn(s),Gdy(s)≈0,Gny(s)≈1;当f≥fq,Q≈0,Guy(s)≈Gp(s),Gdy(s)≈Gp(s),Gny(s)≈0.由此可见,外界干扰可以通过低通滤波器的合理设计过滤掉.但是设计低通滤波器时有两点需要予以考虑:首先,需使Q(s)Gn-1(s)正则,Q(s)的相对阶应不小于Gn-1(s)的相对阶;其次,Q(s)的带宽设计应该在干扰抑制能力与抑制噪声即系统相对稳定度之间折衷.设Gp(s)的标称模型为Gn(s),则被控对象的数学模型可用标称模型及可变传递函数的乘积表示,即式中Δs为可变的传递函数.欲使干扰观测器Q(s)实现鲁棒稳定性,必须满足:本系统采用的低通滤波器形式如下:当τ=0.001时,式(9)可以得到满足,同时外界干扰可以得到很好的抑制.3 基于干扰观测器的重复控制技术重复控制是一种基于内模原理的控制方法[8].内模原理的基本思想是:如果要使一个稳定的反馈系统实现对某一外激励信号的稳态无误差的跟踪或者抑制,其充分必要条件是在系统回路中设置这一激励信号的发生器[9].近年来,重复控制被广泛应用于光伏逆变[10-11]、有源滤波[12-13]、伺服控制等领域[14-15];重复控制亦与 PID 控制[16]、最优控制[17]和神经网络控制[18-19]等控制策略相结合成复合控制策略.本文将重复控制器插入到扰动观测器前,如图3所示.基于重复控制理论设计出的重复控制器的输出为上一个周期的控制偏差,加到干扰观测器的输入信号除偏差信号外,还叠加了上一周期该时刻的控制偏差.把上一次运行时的偏差反映到现在,和现在的偏差一起加到干扰观测器上进行控制,偏差被重复使用,经过几个周期的重复控制之后可以大大的提高系统的控制精确度,改善系统品质[20].图3 基于干扰观测器的重复控制系统框图基于干扰观测器的重复控制技术既利用了扰动观测器的补偿作用,又利用了重复控制的重复叠加提高精确度的特性,有利于抑制三轴转台的动力学耦合.4 仿真研究为了验证基于干扰观测器的重复控制对三轴转台解耦的有效性,本文对三轴转台伺服系统的位置跟踪进行了仿真研究.并将基于扰动观测器的PID控制与基于干扰观测器的重复控制进行了分析比较,观察其是否能达到本转台所要求的位置精确度. 本论文研究的三轴转台伺服系统使用直流力矩电机直接驱动.力矩电动机就是一种能和负载直接连接产生较大转矩,带动负载在堵转或大大低于空载转速下运转的电动机.力矩电机的工作原理和传统的直流伺服电机相同,而直流电机的数学模型可以表示为[21]式中:Km与Tm有明显的物理意义;Km为系统增益;Tm是电机时间常数.结合本研究中内框驱动电机的参数,可以得到内框驱动电机的数学模型即实际被控对象为取标称模型为本文中所使用的转台性能指标为:内框旋转角度范围在-20°~20°,中框旋转角度范围为-30°~30°,外框旋转角度为0°~360°,三框最高转速均为120°/s,最大加速度均为800°/s2,三框的角位置精度误差均为5″.以研究内框的位置跟踪为例,在满足系统性能指标的前提下,分两种情况进行仿真.第一种情况:取内框给定位置信号为:r(t)=sin8πt,扰动信号为中框与外框分别转过1°时对内框产生的耦合影响;第二种情况为:取内框给定位置信号为r(t)=10sin2πt,扰动信号为中框和外框分别转过10°时对内框产生的耦合影响.仿真结果如下:从以上仿真曲线可以看出,干扰观测器不仅能观测到三轴转台的动力学耦合,而且采用干扰观测器使得系统对输入信号的跟踪性能明显优于无干扰观测器时对输入信号的跟踪性能.但是本文所研究的转台角位置精确度要求为5″,即0.001 389°,仅仅使用干扰观测器仍不能达到精确度要求.根据本文的研究,在干扰观测器前加上重复控制之后,经过1~2个周期的调整,跟踪误差稳定在0.000 4°左右,完全符合角位置精确度要求.图4 第一种情况下仿真结果图图5 第二种情况下仿真结果图5 结语本文为了抑制三轴转台动力学耦合对系统的影响,提高系统的位置跟踪精确度,将干扰观测器控制策略与重复控制算法相结合.该方法较文[2]中方法而言更贴合实际,更多的考虑实际中电机和外界干扰的对耦合的影响;较文[3]而言,本文方法下系统响应速度和解耦精度都有明显提高.参考文献:【相关文献】[1]李秋红,薛开,李燕.双半轴轴承结构的功率流传递特性[J].哈尔滨工程大学学报,2011,32(19):1163-1167..[2]黄卫权,刘文佳.三轴仿真转台耦合问题的研究[J].弹箭与制导学报,2009,29(1):99-103. [3]刘延斌,金光,何惠阳.三轴仿真转台系统模型建立及解耦控制研究[J].哈尔滨工业大学学报,2003,35(3):323-328.[4]李付军,雒宝莹.3轴电动转台动力耦合分析及抑制策略.[J].上海交通大学学报,2011,45(2):202-207.[5]崔栋良.三轴摇摆台动力学仿真与复合控制研究[D].哈尔滨:哈尔滨工程大学,2009:43-50. [6]高钟毓.机电控制工程[M]3版.北京.清华大学出版社.2011:8.[7]高亮.基于干扰观测器的转台控制系统设计[D].哈尔滨:哈尔滨工业大学,2007:36.[8]孙宜标,闫峰,刘春芳.抑制直线伺服系统周期性扰动的改进型重复控制[J].控制与检测,2009,4:42-45.[9]陈诗恒.基于二维混合模型的静态输出反馈鲁棒重复控制[D].长沙:中南大学,2009:8. [10]张国月,曲轶龙,齐冬莲,等.基于重复控制的三电平光伏逆变技术.[J].浙江大学学报:工学版,2012,46(7):1339-1344.[11]魏艳芳,赵莉华,荣先亮.基于PI控制和重复控制的100KW隔离型光伏逆变器[J].可再生能源,2012,30(4):6-9.[12]于晶荣,栗梅,孙尧.有源电力滤波器的改进重复控制及其优化设计[J].电工技术学报,2012,27(2):235-242.[13]徐明夏,林平,张涛,等.有源电力滤波器重复控制方法的设计[J].电源学报,2012(3):16-20.[14]夏加宽,郭铁,何新.基于重复控制的高频响直线伺服系统[J].微电机,2012,45(3):44-46.[15]潘宇航,曾清平,曹帅,等.基于重复控制技术的位置伺服系统的设计研究[J].空军雷达学院学报,2010,24(1):51-53.[16]张震,柴文野,潘登,等.基于PID和重复控制的UPS逆变器的研究[J].电测与仪表,2011,48(545):89-92.[17]张宜标,王欢,杨俊友.基于H∞最优控制的PMLSM伺服系统鲁棒重复控制[J].沈阳工业大学学报,2012,34(3):241-246.[18]黄薇,周荔丹,郑益慧,等.基于神经网络PI重复控制器的三相并联有源电力滤波器[J].电力系统保护与控制,2012,40(3):78-84.[19]张丹红,胡孝芳,苏义鑫,等.结合重复控制补偿和CMAC的液压伺服系统PID控制研究[J].机械科学与技术,2012,31(5):749-752.[20]胡洪波,于梅.低频标准振动台波形复合控制仿真研究[J].计量技术,2008,1:50-53. [21]KATSUHIKO Ogata.现代控制工程[M].5版,卢伯英,佟明家译.北京.电子工业出版社,2011:30-51.。
教材董景新,赵长德,控制工程基础,北京:清华大学出版社,1992主要参考文献[1] 张伯鹏,控制工程基础,北京:机械工业出版社,1982.「2」高钟毓主编,机电一体化系统设计,北京:机械工业出版社,1997.[3] 王显正,范崇,控制理论基础,北京:国防工业出版社,1980.[4]Katsuhiko Ogata(美),现代控制工程(第四版中译本),北京:电子工业出版社,2002.[5] 吴麒,自动控制原理,北京:清华大学出版社,1990.[6」李友善,自动控制原理,北京:国防工业出版社,1980.[7] 杨叔子,杨克冲,机械工程控制基础,武汉:华中工学院出版社,1984.[8」阳含和,机械控制工程(上册),北京:机械工业出版社,1986.[9] Morris Driels,Linear Control Systems Engineering(国际知名大学原版教材),北京:清华大学出版社,2000[10] Gene F.Franklin,J.David Powell,Emami Naeini, Feedback Control of Dynamic Systems (3rd ed), Addison-Wesley Publishing Company, 1994[11] Richard C.Dorf,Robert H.Bishop, Modern Control System (7th ed),Addison-Wesley Publishing Company, 1995[12] John Van De Vegte, Feedback Control System (3rd ed), Prentice-Hall, Inc., Englewood:Cliffs,New Jersey, 1994「13」Ernest O. Doebelin, Control System Principles and Design,Prentice-Hall, Inc.,Englewood:Cliffs,New Jersey, 198558。
参考文献[1] 李建勇.机电一体化技术[M].北京:科学出版社,2004:[2] 李运华.机电控制[M].北京航空航天大学出版社,2003:[3] 芮延年.机电一体化系统设计[M].北京机械工业出版社,2004:[4] 王中杰,余章雄,柴天佑.智能控制综述[J].基础自动化,2006;(6):[5] 章浩,张西良,周士冲.机电一体化技术的发展与应用[J].农机化研究,2006;(7):[6] 梁俊彦,李玉翔.机电一体化技术的发展及应用[J].科技资讯,2007;(9):参考文献[1]尹志强.机电一体化系统设计课程设计指导书[M].北京:机械工业出版社.2007.[2]张建民.机电一体化系统设计[M].3版.北京:高等教育出版社.2007.参考文献:[1]芮延年:机电一体化系统设计[M].北京:机械工业出版衽,2004[2]李建勇:机电一体化技术.北京:科学出版社,2004.[3]王俊普:智能控制[M].合肥:中国科学技术大学出版社,1996[4]徐志毅:机电一体化技术在支柱产业中的应用.上海科学技术出版社,1 997参考文献:[1]刘晓英张晓霞:机电一体化技术在企业中的重要作用.现代农业,200 7年11期[2]章浩张西良周士冲:机电一体化技术的发展与应用.农机化研究,2006,(07)[3]杨明路琴:机电一体化的研究现状与发展趋势.农机化研究,2006,(08)[4]孙锦秀邱燃:机械工业技术和产品发展的新趋向.农机化研究,2006,(04)参考文献[1]张建民.机电一体化系统设计[M].北京:北京理工大学出版社,2000.[2]廖效果,朱启逑.数宁控制机床[M].武汉:华中理工大学出版杜,1999.[3]赵松年.机电一体化数控系统设计[M].北京:机械工业出版社,1998.[4]安刚,龚鑫茂.随机振动环境下结构的疲劳失效分析[J].机械科学与技术,2000,19.参考文献:[1]李建勇.机电一体化技术[M].北京.科学出版社.2004.[2]高钟毓.机电控制工程[M].北京.清华大学出版社.2002.[3]刘助柏.知识创新思维方法论[M].北京.机械工业出版社.1999.[4]顾京.现代机床设备[M].北京.化学工业出版社.2001.参考文献:[1]袁中凡.机电一体化技术[M].北京:电子工业出版社.2006.[2]殷际英.光机电一体化实用技术[M].北京:化学工业出版社.2003.[3]芮延年.机电一体化系统设计[M].北京:机械工业出版社.2004.参考文献[1] 刘志,朱文坚. 光机电一体化技术,现代制造工程,2001(12)[2] 梁进秋. 微光机电系统国内外研究进展. 光机电信息,2000(8)[3] 宋云夺编译. 光机电一体化业的未来. 光机电信息,2003(12)[4] 左铁钏、施定源、陈铠. 激光加工技术的优势及在工业生产中的应用. 激光杂志,1999(4)[5] 王家淳. 激光焊接技术的发展与展望. 激光技术,2001(2)参考文献:[1] 李建勇.机电一体化技术[M].北京:科学出版社, 2004.[2] 傅运刚,陈维健.机电一体化应用技术基础[M].徐州:中国矿业大学出版社,1996:5-6.[3] 洪钟洲.数控系统的发展现状和趋势[J].机电一体化,1996,2(4):14-17.[4] 杜丽.机电一体化技术的发展趋势[J].机电工程,1997,(6):10-11.[5] 李纲.计算机集成制造系统CIMS[J].宁夏大学学报,1995,(3):34-35.[6] 刘杰,赵春雨.机电一体化技术基础与产品设计[M].北京:冶金工业出版社,2003.[7] 蔡伟文.机电一体化的发展现状和前景[J].厦门科技,1996,(5):3-4.[8] 李运华.机电控制[M].北京:北京航天航空大学出版社,2003.参考文献[1]李建勇.机电一体化技术[M].北京:科学出版社,2004.[2]李运华.机电控制[M].北京:北京航空航天大学出版社,2003.[3]洪钟洲.数控系统的发展现状和趁势.机电一体化.1996[4]项占琴.微电子机械的发展现状及前景.机电工程.1997,[5]张建民.机电一体化系统设计[M].北京:北京理工大学出版社,1996[6]陈瑜.国外机电一体化技术发展趋势[J].国外机电一体化技术.2000,5[7]谢存禧.机电一体化生产系统设计.北京:机械工业出版社,1999[8]机电一体化技术手册编委会.机电一体化技术手册.北京:机械工业出版社,1994[9]胡泓、姚伯威主编.机电一体化原理及应用.北京:国防工业出版社,1999[10]梁景凯主编.机电一体化技术与系统.北京:机械工业出版社,1997[11]徐志毅主编.机电一体化实用技术.上海:上海科学技术文献出版社,1995[12]秦曾煌主编.电工学.北京:高等教育出版社,1999参考文献1 杨自厚.人工智能技术及其在钢铁工业中的应用[J].冶金自动化,1994(5)2 唐立新.钢铁工业CIMS特点和体系结构的研究[J].冶金自动化,1996(4)3 唐怀斌.工业控制的进展与趋势 [J].自动化与仪器仪表,1996(4)4 王俊普.智能控制[M].合肥:中国科学技术大学出版社,19965 林行辛.钢铁工业自动化的进展与展望[J].河北冶金,1998(1)6 殷际英.光机电一体化实用技术[M].北京:化学工业出版社,20037 芮延年.机电一体化系统设计[M].北京:机械工业出版社,2004.。
机电工程控制基础–01绪论1. 引言机电工程控制是现代工程技术的重要组成部分,它涉及到机械、电子、自动控制、计算机等多学科的知识,广泛应用于各个领域,如制造业、交通运输、能源等。
掌握机电工程控制的基础知识对于工程技术人员来说至关重要。
本文将介绍机电工程控制的基础概念、原理和应用,并对其重要性进行分析和总结。
2. 机电工程控制的定义机电工程控制是指通过控制系统,对机械、电气和电子设备进行调控和管理,以实现指定的功能和性能要求。
它通过传感器获取实时数据,并通过执行器作出相应反馈控制,从而控制和调节系统的运动、速度、力和位置等参数。
机电工程控制可以实现自动化生产、提高生产效率、节约能源和减少人力劳动等目标。
3. 机电工程控制的基础概念3.1 控制系统控制系统是机电工程控制的核心组成部分,它由输入、输出、控制器和执行器等组成。
输入是指传感器获取的实时数据,输出是指执行器根据控制器的指令进行的动作。
控制器是控制系统的决策中心,它根据输入数据进行计算和判断,然后产生输出信号。
执行器是控制系统的执行部分,根据控制器的指令执行相应的动作,从而实现对机械和电子设备的控制。
3.2 反馈控制反馈控制是机电工程控制的一种重要方法,它通过不断检测输出信号,并将其与期望值进行比较,从而调节控制器的输出信号。
反馈控制可以有效地抑制外界干扰和系统误差,提高系统的稳定性和精度。
3.3 闭环控制和开环控制闭环控制和开环控制是机电工程控制中常用的控制策略。
闭环控制是指控制系统通过反馈信号进行控制,可以根据系统的实际状态进行动态调节。
开环控制是指控制系统没有反馈信号,只根据输入信号进行控制。
闭环控制具有抗干扰能力强、自适应性好等优点,但对系统的稳定性和响应速度要求高,开环控制则适用于简单的、稳定的系统。
4. 机电工程控制的原理机电工程控制的原理主要包括系统建模、控制器设计和控制算法等。
系统建模是指将机电系统抽象为数学模型,描述系统的结构和动态特性。
电气工程自动化低压电器中继电器的应用高梓毓摘要:目前我国的电气工程处在跨越式发展的阶段,科技的日益更新,让继电器这一元件在电气工程中的使用效果以及作用都在不断提高。
为了保障电气工程的质量以及其安全性,需要发现继电器中存在的优点与缺点,更好地提高继电器使用效果,让继电器能够确保电气工程在运行时电压稳定,减少突发异常电压对电气工程设备造成的损坏。
科学、合理地使用继电器,既能够充分发挥继电器本身的积极性,同时也能够延长继电器的使用寿命,对于我国国民经济以及电气工程质量而言,都有着促进的作用。
关键词:电气工程自动化;低压电器;继电器引言对于电气工程及其自动化来讲,加强低压电器中继电器的应用势在必行,其既能保证设备运行的安全性与稳定性,还能实现电气工程良性发展。
基于此,相关人员需加大低压电器中继电器的应用力度,促使其存在的实效性发挥出最大化,以期电气工程发展到新高度,为我国现代社会健康发展做铺垫。
本文主要针对电气工程及其自动化低压电器中继电器的应用为进行分析,详细如下:1继电器的相关原理实际上,继电器属于电子控制器件,其由被控制系统与控制系统两方面组成,一般运用到自动控制电路之中,其实际上是运用小电流控制大电流的自动开关。
而继电器是拥有隔离作用的自动开关,在电力电子设备、遥控、自动控制、遥测等方面应用最广泛,是十分关键的控制元件之一。
而继电器通常都具备反映输入变量的感应机构,也就是输入部分,这些变量包含光、速度、温度、电流、温度、电压、功率、频率等;还包含控制被控电路通断的执行机构,也就是输出部分;而继电器除了输出部分与输入部分,好包含耦合隔离输入量,功能处理与对输出部分展开驱动工作的中间机构,也就是驱动部分。
作为一种控制元件,总结起来,继电器有下述几点优势:(1)拓展控制范围。
比如多触点继电器控制信号到达一定值时,能够通过多种模型,实现接通、换接以及开断多路电路。
(2)放大。
比如中间继电器和灵活性继电器等等,利用非常微小的控制量,能够实现对大功率电路控制。