《理论力学》合成运动习题解
- 格式:doc
- 大小:1.97 MB
- 文档页数:25

运动的合成与分解·典型例题解析【例1】如图33-1所示,物体在恒力F作用下沿曲线从A运动到B,这时突然使它受的力反向,而大小不变,即由F变为-F,在此力作用下,关于物体以后的运动情况的下列说法中正确的是[ ] A.物体不可能沿曲线Ba运动B.物体不可能沿直线Bb运动C.物体不可能沿曲线Bc运动D.物体不可能沿原曲线由B返回A解析:由曲线运动产生的条件可知,物体的运动轨迹始终弯向合外力指向的这一侧.该题中物体受到的外力反向以后,物体运动的瞬时速度方向仍沿原来的切线方向,但曲线的弯曲方向也随合外力方向的改变而改变,因此此物体可能沿曲线Bc运动.所以,本题的正确选项为A、B、D.点拨:作曲线运动物体的运动轨迹一定处于合外力方向和速度方向的夹角之中.【例2】有关运动的合成,以下说法中正确的是[ ] A.两个直线运动的合运动一定是直线运动B.两个不在一直线上的匀速直线运动的合运动一定是直线运动C.两个初速度为零的匀加速直线运动的合运动一定是匀加速直线运动D.匀加速运动和匀速直线运动的合运动一定是直线运动解析:两个直线运动合成,其合运动的性质和轨迹由分运动的性质及合初速度与合加速度的方向关系来决定:两个匀速直线运动的合运动无论它们的方向如何,它们的合运动仍是匀速直线运动.一个匀速直线运动和一个匀变速直线运动的合运动一定是匀变速运动——两者共线时为匀变速直线运动,两者不共线时为匀变速曲线运动.两个匀变速直线运动的合运动仍为匀变速运动——当合初速度与合加速度共线时为匀变速直线运动,当合初速度与合加速度不共线时为匀变速曲线运动.所以,正确选项为B、C.点拨:判别两个分运动合成的合运动是否为直线运动,要看其合运动的初速度与合运动的加速度是否在同一条直线上.【例3】如图33-2所示,河水的流速v1=5m/s,一只小机动船在静水中的速度v2=4m/s.现在小船从A点出发开始渡河,要使它的位移最小,船头应指向何方行驶?解析:如图33-2所示,v1表示水流速度,若以矢量头B点为圆心,以船速v2的长度为半径作一圆弧,则从A点引向圆周上任一点表示矢量的线段都是机动船可能的合速度.显然,自A点引向圆周的切线AC所表示的矢量的指向为合速度v的方向时,船渡河时的位移为最小.设小机动船渡河发生的位移为最小时,船头所指的方向与河岸成θ角,则cosθ=v2/v1=4/5.可得θ=37°,因此船头应指向与河岸成θ=37°的上游方向.点拨:机动船渡河的运动可看做水流的运动和机动船相对于水的运动的合运动.若在船速大于水速、即v2>v1的情形下,它们的合速度的方向垂直于河岸时其位移最小.但本题的情形却不同,是船速小于水速,即v2<v1,这时,两个分运动的合速度的方向不可能垂直于河岸.【问题讨论】(1)欲使小船能到达正对岸,小船在静水中的速度应满足什么样的条件?(2)如果出现船速与水速相等的特殊情况,船渡河时的最小位移是什么呢?(3)处理矢量的合成或分解问题时,可先画出矢量三角形来,这是平行四边形定则的简化,便于对问题的分析研究.【例4】如图33-3(a)所示,用绳牵引小船靠岸,若收绳的速度为v1,在绳子与水平方向夹角为α的时刻,小船靠岸的速度v为多大?点拨:小船的运动只有水平前进的靠岸速度v,没有垂直向上的速度.小船靠岸的速度取决于绳子OA缩短的快慢,为了找到绳子OA缩短的快慢,可以把船速v分解成两个分速度:一个沿绳方向的分速度,一个垂直于绳方向的分速度.其中沿绳方向的分速度即为收绳速度,由此可解得船速v的大小.【问题讨论】有位同学对该题的解法如下:如图33-3(b)所示,将收绳的速度v1分解为水平速度v及垂直速度v',其中水平速度v为船的速度,则有v=v1cosα.你能指出这种解法的错误所在吗?参考答案v1/cosα跟踪反馈1.下列关于曲线运动的描述中,正确的是[ ] A.曲线运动可以是匀速运动B.曲线运动一定是变速运动C.曲线运动可以是匀变速运动D.曲线运动的加速度可能为零2.下列说法中,正确的是[ ] A.由于曲线运动的速度一定变化,所以加速度也一定变化B.物体所受合外力的方向与运动的速度方向不在一直线上是产生曲线运动的条件C.物体在恒力作用下不可能做曲线运动D.物体在变力作用下一定做曲线运动3.一条河宽500m,河水的流速是3m/s,一只小艇以5m/s(静水中的速度)的速度行驶,若小艇以最短的时间渡河,所用的时间是________s;若小艇要以最短的航程渡河,所需的时间是________s.4.以速度v匀速航行的舰艇准备射击与舰身垂直方向的水平面上的某一固定目标,已知炮弹的发射速度为v0(炮弹的运动看作水平方向上的匀速运动),则发射方向与舰身的夹角应为多大?[提示:炮弹在水平方向上的运动速度,由炮弹的水平发射速度和舰艇的航行速度合成的.]参考答案1.BC 2.B 3.100,125 4.arccosv/v0。
运动的合成与分解·典型例题解析【例1】如图33-1所示,物体在恒力F作用下沿曲线从A运动到B,这时突然使它受的力反向,而大小不变,即由F变为-F,在此力作用下,关于物体以后的运动情况的下列说法中正确的是[ ] A.物体不可能沿曲线Ba运动B.物体不可能沿直线Bb运动C.物体不可能沿曲线Bc运动D.物体不可能沿原曲线由B返回A解析:由曲线运动产生的条件可知,物体的运动轨迹始终弯向合外力指向的这一侧.该题中物体受到的外力反向以后,物体运动的瞬时速度方向仍沿原来的切线方向,但曲线的弯曲方向也随合外力方向的改变而改变,因此此物体可能沿曲线Bc运动.所以,本题的正确选项为A、B、D.点拨:作曲线运动物体的运动轨迹一定处于合外力方向和速度方向的夹角之中.【例2】有关运动的合成,以下说法中正确的是[ ] A.两个直线运动的合运动一定是直线运动B.两个不在一直线上的匀速直线运动的合运动一定是直线运动C.两个初速度为零的匀加速直线运动的合运动一定是匀加速直线运动D.匀加速运动和匀速直线运动的合运动一定是直线运动解析:两个直线运动合成,其合运动的性质和轨迹由分运动的性质及合初速度与合加速度的方向关系来决定:两个匀速直线运动的合运动无论它们的方向如何,它们的合运动仍是匀速直线运动.一个匀速直线运动和一个匀变速直线运动的合运动一定是匀变速运动——两者共线时为匀变速直线运动,两者不共线时为匀变速曲线运动.两个匀变速直线运动的合运动仍为匀变速运动——当合初速度与合加速度共线时为匀变速直线运动,当合初速度与合加速度不共线时为匀变速曲线运动.所以,正确选项为B、C.点拨:判别两个分运动合成的合运动是否为直线运动,要看其合运动的初速度与合运动的加速度是否在同一条直线上.【例3】如图33-2所示,河水的流速v1=5m/s,一只小机动船在静水中的速度v2=4m/s.现在小船从A点出发开始渡河,要使它的位移最小,船头应指向何方行驶?解析:如图33-2所示,v1表示水流速度,若以矢量头B点为圆心,以船速v2的长度为半径作一圆弧,则从A点引向圆周上任一点表示矢量的线段都是机动船可能的合速度.显然,自A点引向圆周的切线AC所表示的矢量的指向为合速度v的方向时,船渡河时的位移为最小.设小机动船渡河发生的位移为最小时,船头所指的方向与河岸成θ角,则cosθ=v2/v1=4/5.可得θ=37°,因此船头应指向与河岸成θ=37°的上游方向.点拨:机动船渡河的运动可看做水流的运动和机动船相对于水的运动的合运动.若在船速大于水速、即v2>v1的情形下,它们的合速度的方向垂直于河岸时其位移最小.但本题的情形却不同,是船速小于水速,即v2<v1,这时,两个分运动的合速度的方向不可能垂直于河岸.【问题讨论】(1)欲使小船能到达正对岸,小船在静水中的速度应满足什么样的条件?(2)如果出现船速与水速相等的特殊情况,船渡河时的最小位移是什么呢?(3)处理矢量的合成或分解问题时,可先画出矢量三角形来,这是平行四边形定则的简化,便于对问题的分析研究.【例4】如图33-3(a)所示,用绳牵引小船靠岸,若收绳的速度为v1,在绳子与水平方向夹角为α的时刻,小船靠岸的速度v为多大?点拨:小船的运动只有水平前进的靠岸速度v,没有垂直向上的速度.小船靠岸的速度取决于绳子OA缩短的快慢,为了找到绳子OA缩短的快慢,可以把船速v分解成两个分速度:一个沿绳方向的分速度,一个垂直于绳方向的分速度.其中沿绳方向的分速度即为收绳速度,由此可解得船速v的大小.【问题讨论】有位同学对该题的解法如下:如图33-3(b)所示,将收绳的速度v1分解为水平速度v及垂直速度v',其中水平速度v为船的速度,则有v=v1cosα.你能指出这种解法的错误所在吗?参考答案v1/cosα跟踪反馈1.下列关于曲线运动的描述中,正确的是[ ] A.曲线运动可以是匀速运动B.曲线运动一定是变速运动C.曲线运动可以是匀变速运动D.曲线运动的加速度可能为零2.下列说法中,正确的是[ ] A.由于曲线运动的速度一定变化,所以加速度也一定变化B.物体所受合外力的方向与运动的速度方向不在一直线上是产生曲线运动的条件C.物体在恒力作用下不可能做曲线运动D.物体在变力作用下一定做曲线运动3.一条河宽500m,河水的流速是3m/s,一只小艇以5m/s(静水中的速度)的速度行驶,若小艇以最短的时间渡河,所用的时间是________s;若小艇要以最短的航程渡河,所需的时间是________s.4.以速度v匀速航行的舰艇准备射击与舰身垂直方向的水平面上的某一固定目标,已知炮弹的发射速度为v0(炮弹的运动看作水平方向上的匀速运动),则发射方向与舰身的夹角应为多大?[提示:炮弹在水平方向上的运动速度,由炮弹的水平发射速度和舰艇的航行速度合成的.]参考答案1.BC 2.B 3.100,125 4.arccosv/v0。



第七章作业答案1、解 由点M 的相对运动方程可改写为
由题得点M 的坐标变换关系式
点M 的绝对轨迹方程
2、解 (a)套筒A 为动点,动系固结于杆O1 A
由图a1
(b)套筒A 为动点,动系固结于杆O2 A,速度分析如图b1 所示。
3、解 ① 活动销子M 为动点,动系固结于轮O
② 活动销子M 为动点,动系固结于杆OA
速度分析如图b 所示
4、解 速度分析,如图b所示
加速度分析,如图c所示
5、解 点A 为动点,动系固结于小车,加速度分析如图b 所示。
由题意得t = 1 s时,各量为
分别向轴x , y 方向投影得
6、解 小环M 为动点,动系固结于曲杆OBC,速度分析如图b 所示。
加速度分析如图c 所示。

理论力学课后习题及答案解析文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-MG129]第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A 点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力RB和一个力偶M B,且:如图所示;将RB向下平移一段距离d,使满足:最后简化为一个力R,大小等于RB。
其几何意义是:R 的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力RA和一个力偶M A,且:如图所示;将RA向右平移一段距离d,使满足:最后简化为一个力R,大小等于RA。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
解:(1) 研究整体,受力分析(CD是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。


.《动力学I 》第一章 运动学部分习题参考解答1-3 解:运动方程:θtan l y =,其中kt =θ。
将运动方程对时间求导并将030=θ代入得34cos cos 22lklk l y v ====θθθ&& 938cos sin 2232lk lk y a =-==θθ&&1-6证明:质点做曲线运动,所以n t a a a +=, 设质点的速度为v ,由图可知:a a v v yn cos ==θ,所以: yv va a n =将c v y =,ρ2n va =代入上式可得 ρc v a 3=证毕1-7证明:因为n2a v=ρ,va a v a ⨯==θsin n所以:va ⨯=3v ρ证毕1-10解:设初始时,绳索AB 的长度为L ,时刻t 时的长度 为s ,则有关系式:t v L s 0-=,并且 222x l s +=将上面两式对时间求导得:0v s -=&,xx s s &&22= 由此解得:xsv x-=& (a ) (a)式可写成:s v x x 0-=&,将该式对时间求导得: 2002v v s x x x =-=+&&&& (b)将(a)式代入(b)式可得:3220220xlv x x v x a x -=-==&&&(负号说明滑块A 的加速度向上)1-11解:设B 点是绳子AB 与圆盘的切点,由于绳子相对圆盘无滑动,所以R v B ω=,由于绳子始终处于拉直状态,因此绳子上A 、B 两点的速度在 A 、B 两点连线上的投影相等,即: θcos A B v v = (a ) 因为xR x 22cos -=θ (b ) 将上式代入(a )式得到A 点速度的大小为: 22Rx x Rv A -=ω (c )由于x v A &-=,(c )式可写成:Rx R x xω=--22&,将该式两边平方可得: 222222)(x R R x x ω=-&将上式两边对时间求导可得:x x R x x R x x x &&&&&2232222)(2ω=--将上式消去x &2后,可求得:22242)(R x xR x --=ω&&由上式可知滑块A 的加速度方向向左,其大小为 22242)(R x xR a A -=ω1-13解:动点:套筒A ;动系:OA 杆; 定系:机座; 运动分析:o vAxω OθAvAx ωO BvB Ra ve vr vxyoanavy vθ θxyo anatθ.绝对运动:直线运动; 相对运动:直线运动; 牵连运动:定轴转动。


第7章 点的合成运动一、是非题(正确的在括号内打“√”、错误的打“×”)1.点的速度和加速度合成定理建立了两个不同物体上两点之间的速度和加速度之间的 关系。
( √ ) 2.根据速度合成定理,动点的绝对速度一定大于其相对速度。
( × )3.应用速度合成定理,在选取动点和动系时,若动点是某刚体上的一点,则动系不可以固结在这个刚体上。
( √ )4.从地球上观察到的太阳轨迹与同时在月球上观察到的轨迹相同。
( × ) 5.在合成运动中,当牵连运动为转动时,科氏加速度一定不为零。
( × ) 6.科氏加速度是由于牵连运动改变了相对速度的方向而产生的加速度。
( √ ) 7.在图中,动点M 以常速度r v 相对圆盘在圆盘直径上运动,圆盘以匀角速度ω绕定轴O 转动,则无论动点运动到圆盘上的什么位置,其科氏加速度都相等。
( √ )二、填空题1.已知r 234=++v i j k ,e 63=-ωi k ,则k =a 18 i + -60 j + 36 k 。
2.在图中,两个机构的斜杆绕O 2的角速度均为2ω,O 1O 2的距离为l ,斜杆与竖直方向的夹角为θ,则图(a)中直杆的角速度=1ωθθωcos sin 2,图(b)中直杆的角速度=1ω2ω。
图 图3.科氏加速度为零的条件有:动参考系作平动、0=r v 和r e v ω//。
4.绝对运动和相对运动是指动点分别相对于定系和动系的运动,而牵连运动是指牵连点相对于定系的运动。
牵连点是指某瞬时动系上和动点相重合的点,相应的牵连速度和加速度是指牵连点相对于定系的速度和加速度。
5.如图所示的系统,以''Ax y 为动参考系,Ax'总在水平轴上运动,AB l =。
则点B 的相对轨迹是圆周,若kt ϕ= (k 为常量),点B 的相对速度为lk ,相对加速度为2lk 。
图6.当点的绝对运动轨迹和相对运动轨迹都是曲线时,牵连运动是直线平动时的加速度合成定理表达式是a e r =+a a a ;牵连运动是曲线平动时的加速度合成定理表达式是 a e r =+a a a ;牵连运动是转动时的加速度合成定理表达式是a e r k =++a a a a 。

第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
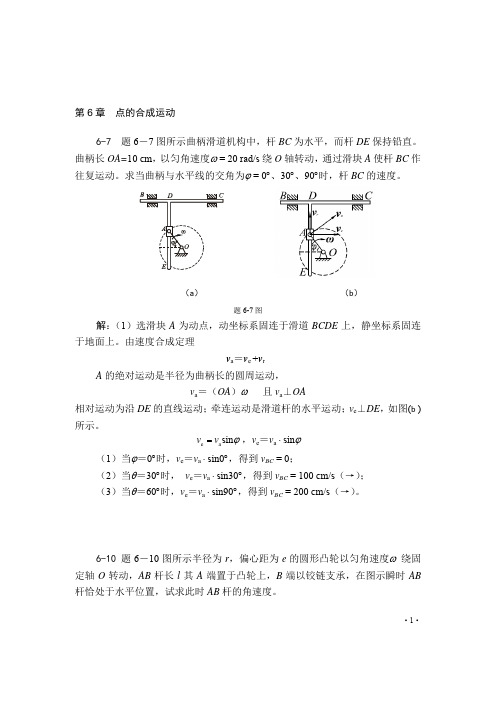
2、速度分析:r e a v v v +=0a 2ωl v =;0e a 2ωl v v ==1e1ωω==AO v BCO (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。
当机构在图示位置时,曲柄与水平线交角 30=φ。
求此时滑杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v += πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程trd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 22222221++=+++=将(1)、(2)式相除,得: 2.摇杆转动方程: dt r tr +=ωωϕcos sin tandt r t r +=ωωϕcos sin arctan5-4 曲柄摇杆机构如图所示。

理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示; 将R B 向下平移一段距离d ,使满足:最后简化为一个力R ,大小等于R B 。
其几何意义是:R 的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A 点为简化中心,平行力系的主矢是:平行力系对A 点的主矩是:向A 点简化的结果是一个力R A 和一个力偶M A ,且:如图所示;将R A 向右平移一段距离d ,使满足:最后简化为一个力R ,大小等于R A 。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。


第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。

第七章 点的合成运动 一、是非题7.1.1动点的相对运动为直线运动,牵连运动为直线平动时,动点的绝对运动必为直线运动。
( × ) 7.1.2无论牵连运动为何种运动,点的速度合成定理r e av v v +=都成立。
( ∨ ) 7.1.3某瞬时动点的绝对速度为零,则动点的相对速度和牵连速度也一定为零。
( × ) 7.1.4当牵连运动为平动时,牵连加速度等于牵连速度关于时间的一阶导数。
( ∨ ) 7.1.5动坐标系上任一点的速度和加速度就是动点的牵连速度和牵连加速度。
( × ) 7.1.6不论牵连运动为何种运动,关系式都成立。
( × ) 7.1.7只要动点的相对运动轨迹是曲线,就一定存在相对切向加速度。
( × ) 7.1.8在点的合成运动中,判断下述说法是否正确:(1)若r v 为常量,则必有r a =0。
( × ) (2)若e ω为常量,则必有e a =0. ( × ) (3)若e rωv //则必有0=C a 。
( ∨ )7.1.9在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。
( × ) 7.1.10当牵连运动为定轴转动时一定有科氏加速度。
( × )二、 填空题7.2.1 牵连点是某瞬时 动系 上与 动点重合的那一点。
7.2.2a v v =,在一般情况下,若已知v e 、v r a 的大小。
三、选择题:7.3.1 动点的牵连速度是指某瞬时牵连点的速度,它相对的坐标系是( A )。
A 、 定参考系B 、 动参考系C 、 任意参考系7.3.2 在图示机构中,已知t b a s ωsin +=, 且t ωϕ=(其中a 、b 、ω均为常数),杆长为L ,若取小球A 为动点,动系固结于物块B ,定系固结于地面,则小球的牵连速度v e 的大小为( B )。
A 、 ωLB 、 t b ωωcosC 、 t L t b ωωωωcos cos +D 、ωωωL t b +cos四、计算题7.4.1 杆OA 长L ,由推杆BC 通过套筒B 推动而在图面内绕点O 转动,如图所示。
2v v e =1v v =ABr v v =045045v r =N竞赛资料 点的合成运动习题解[习题7-1] 汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。
求在B 车上观察到的A车的速度。
解: 动点:A 车。
动系:固连于B 车的坐标系。
静系:固连地面的坐标系。
绝对运动:动点A 相对于地面的运动。
相对运动:动点A 相对于B 车的运动。
牵连运动:在动系中,动点与动系的重合点, 即牵连点相对于静系(地面)的运动。
当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。
2v v e =。
由速度合成定理得:→→→+=r e v v v 。
用作图法求得:h km v v AB r /40== (↑)故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。
[习题7-2] 由西向东流的河,宽1000m ,流速为0.5m/s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。
问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。
动系:固连在流水上。
静系:固连在岸上。
绝对运动:岸上的人看到的船的运动。
相对运动:船上的有看到的船的运动。
牵连运动:与船相重合的水体的运动。
绝对速度:未知待求,如图所示的v 。
相对速度:s m v r /1=,方向如图所示。
牵连速度:s m v e /5.0=,方向如图所示。
由速度合成定理得:→→→+=r e v v vv r 1=Nsm /2sm v e /1=v)/(118.115.02222s m v v v r e =+=+=0435.635.01arctan arctan===e r v v θ )(50021000tan 1000m AC ===θ,即,船将在北岸下流500m 处靠岸。
如图所示,A为出发点,B为靠岸点。
渡河所花的时间:秒分4016)(1000/110001===s sm mt(2)03015.0arcsin arcsin ===r e v v α)/(866.05.012222s m v v v e r =+=-=即船头对准方向为北偏西030 渡河所花的时间:秒分1519)(1155/866.010002===s sm mt[习题7-3] 播种机以匀速率s m v /11=直线前进。
种子脱离输种管时具有相对于输种管的速度s m v /22=。
求此时种子相对于地面的速度,及落至地面上的位置与离开输种管时的位置之间水平距离。
解: 动点:种子。
动系:固连于输种管的坐标系。
静系:固连于地面的坐标系。
绝对速度:种子相对于地面的速度,未知待求。
相对速度:s m v v r /22== 牵连速度:s m v v e /11==→→→+=r e v v v)/(65.2120cos 21221022s m v =⨯⨯-+=0120sin 65.2)60sin(1=-θ 0007.1965.2120sin arcsin 60==-θ093.40=θ即→v 与→1v 之间的夹角为093.40=θ。
种子走过的水平距离为:t v t v s x ⋅==θcos221gt t v h y += 221s i n gt t v h +=θ28.95.093.40sin 65.225.0t t ⨯+= 025.0736.19.42=-+t t⎩⎨⎧-=±-=⨯-⨯⨯-±-=不合舍去))((464.0)(11.08.9813.2736.19.42)25.0(9.44736.1736.12s s t)(22.011.093.40cos 65.20m s =⨯⨯=[习题7-4] 砂石料从传送带A落到另一传送带B的绝对速度为s m v /41=,其方向与铅直线成030角。
设传送带B与水平面成015角,其速度为s m v /22=,求此时砂石料对于传送带B的相对速度。
又当传送带B的速度多大时,砂石料的相对速度才能与B 带垂直。
解:动点:砂石料。
动系:固连于传送带B的坐标系。
静系:固连于地面的坐标系。
绝对速度:砂石料相对于地面的速度,s m v v /41==。
相对速度:砂石料相对于传送带B的速度,待求。
牵连速度:传送带B相对于地面的速度:s m v v e /22==→→→+=r e a v v v)/(98.375cos 42242022s m v r =⨯⨯-+=e Aa v v =vev 当B r v v ⊥时,传送带B的速度为:)/(04.115sin 415sin 00s m v v a B ===[习题7-5] 三角形凸轮沿水平方向运动,其斜边与水平线成α角。
杆AB的A端搁置在斜面上,另一端B在气缸内滑动,如某瞬时凸轮以速度v 向右运动,求活塞B的速度。
解: 动点:A。
动系:固连于凸轮上的坐标系。
静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,待求。
相对速度:A相对于凸轮的速度。
牵连速度:凸轮相对于地面的速度。
→→→+=r e a v v vαtan v v A =因为杆AB作上下平动,故活塞B的速度为:αtan v v v A B ==[习题7-6] 图示一曲柄滑道机构,长r OA =的曲柄,以匀角速度ω绕O轴转动。
装在水平杆CB上的滑槽DE与水平线成060角。
求当曲柄与水平线的夹角ϕ分别为00、030、060时,杆BC的速度。
解: 动点:A。
a90BCOaevC动系:固连于CBDE上的坐标系。
动系平动,BCCBD EAvvv==静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度。
相对速度:A相对于DE的速度。
牵连速度:CBDE相对于地面的速度。
→→→+=reavvvωrva=0120sin)90120180sin(aBCvv=+--ϕ0120sin)30sin(ϕϕrvBC=-ωϕrvBC⋅-=120sin)30sin(ωωωϕrrrvBC332321120sin)30sin(|-=-=⋅-==负号表示此时速度方向与图示方向相反,即向左。
120sin)3030sin(|300=-==ϕBCv,此时往复运动改变方向。
ωωωϕrrrvBC332321120sin)3060sin(|600==⋅-==,向右。
[习题7-7] 摇杆OC带动齿条AB上下移动,齿条又带动直径为100mm的齿轮绕O1轴摆动。
在图所示瞬时,OC之角速度ω0=0.5rad/s,求这时齿轮的角速度。
解:动点:C。
动系:固连于OC杆上的坐标系。
静系:固连于地面的坐标系。
av ev rv A3090绝对速度:C相对于地面的速度。
相对速度:C相对于OC杆的速度。
牵连速度:OC杆相对于地面的速度。
)/(231.05.030cos 4.00s m OC v e =⨯=⋅=ω→→→+=r e a v v v )/(267.030cos 2.030cos 020s m v v e a ===75.0/2.01===ωr v v AB a)/(33.505.075.0/2.0/267.011s rad r ===ω即齿轮的角速度为s rad /33.51=ω[习题7-8] 摇杆滑道机构的曲柄OA长l ,以匀角速度ω0绕O轴转动。
已知在图所示位置 OA⊥OO1,l AB 2=,求该瞬时BC杆的速度。
解: 动点:A。
动系:固连于D O 1杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,0ωl v a =。
相对速度:A相对于D O 1杆的速度。
牵连速度:D O 1杆相对于地面的速度。
→→→+=r e a v v v 002130sin ωl v v a e == 01211ωωl A O v D O e =⋅= 02121ωωl l D O =⋅ 0411ωω=DO 动点:B。
avrBeav rvaa n 动系:固连于D O 1杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:B相对于地面的速度。
相对速度:B相对于D O 1杆的速度。
牵连速度:D O 1杆相对于地面的速度。
→→→+=r e a v v v0014141ωωωl l B O v D O e =⨯=⋅=000155.1866.030cos ωωl l v v e a ===BC 作平动,故0155.1ωl v v a BC ==[习题7-9] 一外形为半圆弧的凸轮A,半径r=300mm,沿水平方向向右作匀加速运动,其加速度aA=800mm/s2。
凸轮推动直杆BC沿铅直导槽上下运动。
设在图所示瞬时,vA=600mm/s,求杆BC的速度及加速度。
解:动点:B。
动系:固连于凸轮A上的坐标系。
静系:固连于地面的坐标系。
绝对速度:B相对于地面的速度。
相对速度:B相对于凸轮的速度。
牵连速度:B相对于凸轮的速度。
→→→+=r e a v v v凸轮在水平面上作平动,BC在铅垂方向上作平动。
A e v v =)/(23.1039360030cot 30cot 00s mm v v v v v A e a B BC ======)/(12006002230sin 0s mm v v v e er =⨯===→→→→→→++=+=τr n re r e a a a a a a aev rv ra a a 上式在x 轴上的投影为:n r e a a a a -=0030cos 60cosrv a a a a r e n re a 22323⋅-=-=)/(4.8214300)1200(2800732.122s mm a a -=⨯-⨯=,负号表示方向向下。
[习题7-10] 铰接四边形机构中的O1A=O2B=100mm,O1O2=AB,杆O1A以等角速度ω=2rad/s绕O1轴转动。
AB杆上有一套筒C,此筒与CD杆相铰接,机构各部件都在同一铅直面内。
求当φ=60°时CD杆的速度和加速度。
解:动点:C。
动系:固连于AB杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:C相对于地面的速度。
相对速度:C相对于AB杆的速度。
牵连速度:AB杆相对于地面的速度。
→→→+=r e a v v v)/(20021001s mm A O v v v A C e =⨯=⋅===ω)/(1005.020060cos 0s mm v v e a =⨯== )/(100s mm v v v a C CD ===→→→+=r e a a a aA e a a =0=τe a)/(4002100222112s mm A O AO v a a n ee =⨯=⋅===ω)/(4.346866.040060sin 20s mm a a e a =⨯== )/(4.346s mm a a a a C CD ===[习题7-11] 具有圆弧形滑道的曲柄滑道机构,用来使滑道CD获得间歇往复运动。