曲柄滑块练习-ADAMS仿真
- 格式:doc
- 大小:29.50 KB
- 文档页数:1
5.6 ADAMS/View应用实例下面是一个应用ADAMS/View进行动力学建摸和仿真的实例。
在本实例中,将采用ADAMS/View的交互式建摸方式,依次进行几何建摸、添加约束和施加受力,最后对建立好的模型进行动力学仿真。
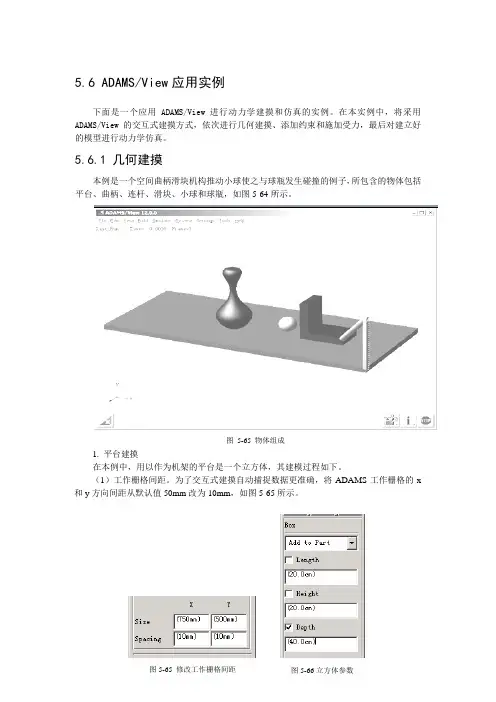
5.6.1 几何建摸本例是一个空间曲柄滑块机构推动小球使之与球瓶发生碰撞的例子,所包含的物体包括平台、曲柄、连杆、滑块、小球和球瓶,如图5-64所示。
图5-65 物体组成1. 平台建摸在本例中,用以作为机架的平台是一个立方体,其建模过程如下。
(1)工作栅格间距。
为了交互式建摸自动捕捉数据更准确,将ADAMS工作栅格的x 和y方向间距从默认值50mm改为10mm,如图5-65所示。
图5-65 修改工作栅格间距图5-66立方体参数(2)在主工具箱中用鼠标右键点击几何建模按钮(默认值是连杆工具)展开所有的几何建模工具(Rigid Body )图标,点击立方体(Box )建摸工具按钮,则在主工具箱的下半部分会出现是否指定立方体长宽高的三个数据编辑框,选中宽度(Depth )选项,填入数值40.0cm ,将立方体的宽度定为40cm ,如图5-66所示。
(3)通过以下菜单路径打开坐标窗口:View —>Coordinates Window ,然后在主窗口栅格上的坐标(-650,0,0(mm ))附近按下鼠标右键,出现坐标输入窗口,如图5-67所示,在其中输入坐标(-650.0, 0.0, -200.0),点击“Apply ”按钮确定立方体左角点;继续在主窗口栅格上坐标(300,0,0(mm ))附近按下鼠标右键,输入坐标(300.0, -20, -200.0),点击“Apply ”按钮确定立方体右角点并建立立方体模型,如图5-68。
在本例中,此立方体模型作为机构支撑平台使用。
图5-68 平台模型2. 小球建摸图5-67 立方体左角点坐标和右角点坐标(1) 在主工具箱中用鼠标右键点击几何建模按钮,展开所有的几何建模工具(Rigid Body )图标,点击球体(Sphere )建摸工具按钮,然后在主窗口栅格上的坐标(-70,30,0(mm ))处按下鼠标左键,拖动鼠标至坐标(-70,0,0(mm ))处松开左键,建立完成小球模型,如图5-69。
ADAMS动力学建模与分析实验报告班级:姓名:学号:页脚内容12013年12月31 日页脚内容2实验一、空间曲柄——滑块机构运动学建模与仿真一、实验目的:1、熟悉ADAMS操作界面,掌握简单几何实体、转动铰、转动函数施加、直线运动约束等基本建模方法,熟练建模操作流程;2、建立空间曲柄——滑块机构运动学模型,进行仿真,获得仿真运动后处理结果。
二、实验要求:1、提交空间曲柄——滑块机构仿真建模流程、仿真模型及其后处理仿真结果曲线。
三、建模与仿真操作流程:结构图:页脚内容3曲柄OA和连杆AB长分别为0.08m和0.03m,曲柄OA作定轴转动,转动轴平行于x轴,角速度矢量沿x的负向,大小为sradw/2π=。
曲柄OA和连杆AB通过球铰连接,连杆AB和划款C在点B通过万向节连接,垂直轴分别为连杆AB的连体矢量m和支座的连体矢量n。
点B与滑块中心C重合。
滑块的滑槽沿x轴。
初始时刻,点O,点A、点B的坐标分别为O(0,0,0),A(0,0.08,0),B(0.2,-0.12,0.1),连体矢量m在公共基上的坐标阵为(0,-1,-2)/5。
要求计算滑块速度和加速度随时间的变化规律,并绘制曲线图。
主要步骤:1、建立刚体构件(1)、建立建立4各主要点(2)、建立连B1,B22、建立运动副和驱动约束(1)、建立转动铰o页脚内容4(2)、B1B2建立球铰A(3)、B2建立点线约束(4)、B2建立垂直约束(5)、在o处加转动铰滑块水平方向速度图:页脚内容5滑块水平方向加速度图:实验总结:学习掌握了ADAMS的使用,认识ADAMS在机械运动学仿真中的运用,模型的建立,约束的添加,驱动的添加以及实验结果的分析。
实验二、平面机械手运动学建模与仿真页脚内容6一、实验目的:1、熟练ADAMS操作,掌握复杂几何实体、固定铰、转动铰、直线运动施加等建模方法;2、建立平面机械手运动学模型,进行仿真,得出仿真运动后处理结果。
二、实验要求:1、提交平面机械手仿真建模流程、仿真模型及其后处理仿真结果曲线。
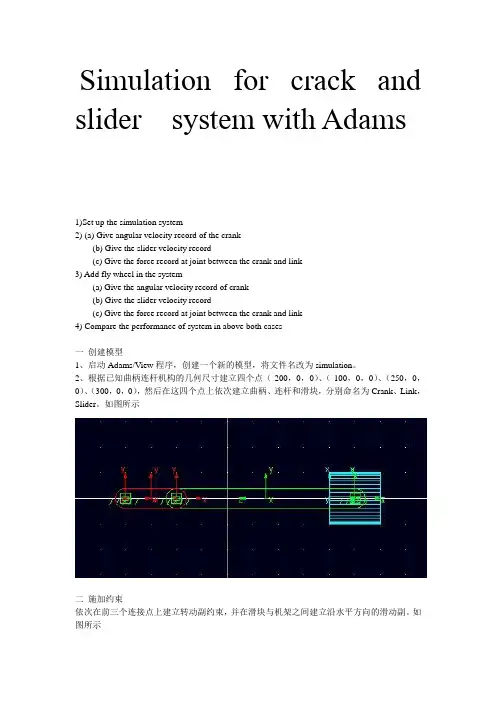
Simulation for crack and slider system with Adams1)Set up the simulation system2) (a) Give angular velocity record of the crank(b) Give the slider velocity record(c) Give the force record at joint between the crank and link3) Add fly wheel in the system(a) Give the angular velocity record of crank(b) Give the slider velocity record(c) Give the force record at joint between the crank and link4) Compare the performance of system in above both cases一创建模型1、启动Adams/View程序,创建一个新的模型,将文件名改为simulation。
2、根据已知曲柄连杆机构的几何尺寸建立四个点(-200,0,0)、(-100,0,0)、(250,0,0)、(300,0,0),然后在这四个点上依次建立曲柄、连杆和滑块,分别命名为Crank、Link,Slider。
如图所示二施加约束依次在前三个连接点上建立转动副约束,并在滑块与机架之间建立沿水平方向的滑动副。
如图所示三施加驱动力在滑块上加一个驱动力F,用if函数定义图3所示的驱动力。
四调入函数IF( AZ( MARKER_2)-(10/180)*pi:0, 0 ,IF( AZ( MARKER_2)-(170/180)*pi:100,100,IF( AZ( MARKER_2)-(730/180)*pi:0, 0 ,IF( AZ( MARKER_2)-(890/180)*pi:100,100,0五施加阻力矩与初速度在曲柄上施加阻力矩,并定义函数-80*WZ( MARKER_2)在曲柄与ground的旋转副上施加初速度200。
北京航空航天大学研究生课程考核记录2013-2014 学年第一学期学号ZY1307307 姓名杨绍宝成绩课程名称:《产品设计与虚拟样机》论文题目:基于ADAMS的曲柄滑块压力机构力的仿真分析任课教师评语:任课教师签字:考核日期:年月日2013-1-5基于ADAMS的曲柄滑块压力机构力的仿真分析ZY1307307 杨绍宝北京航空航天大学机械工程及自动化学院(北京100191)摘要本文主要是对曲柄滑块压力机构进行建立仿真,通过传感器测试施加于滑块上的力,通过这个力控制滑块的运动关键词:ADAMS;曲柄滑块;传感器目录1、曲柄滑块压力机构的设计要求 (3)1) 题目设计要求 (3)2) 求解步骤: (3)2、建立虚拟样机模型: (3)1)设置工作空间和网格 (3)2)创建曲柄滑块模型 (4)3)添加传感器 (12)4)施加运动 (12)3、仿真与测试 ........................... 错误!未定义书签。
1) 仿真模型 (12)2) 模型测试 (12)4、结束语 (13)参考文献: (14)1、曲柄滑块压力机构的设计要求(1)题目设计要求如图1所示为曲柄滑块压力机构简化模型。
已知曲柄长为a=100mm,连杆长度为b=200mm,作用在曲柄上的驱动转矩。
先用弹簧来模拟滑块与被压紧物体之间的力。
设弹簧刚度为K=1N/mm。
为保证被压物体的安全,现需要设置一个力传感器。
当传感器感知到压紧力的值大于或等于70N时,机构就停止运动。
试完成这个力传感器的设计,并通过仿真机构验证其正确性。
图1 曲柄滑块力机构(2)求解步骤:首先创建一个曲柄滑块机构模型以及弹簧,然后通过对曲柄施加运动以及传感器工作,对模型进行仿真。
控制滑块的运动。
2、建立虚拟样机模型:1)设置工作空间和网格根据题目中的数据大小,在建模开始时可以对工作环境进行适当设定,如图2所示:图2工作空间和网格设定2)创建曲柄滑块模型1 创建曲柄曲柄的创建过程是:a 单击Llnk工具按钮,展开选项区;b 选中Length并输入100mm,选中Width输入10mm,选中Depth并输入5mm。

题6-6图为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l D F 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
在本例子中,将展示在ADAMS 中可以先用未组装的形式构造急回机构的各个部件,然后在仿真前让这些部件自动地组装起来,最后进行仿真。
这种方法比较适合构造由较多部件组成的复杂模型。
创建过程⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a newmodel ”,在模型名称(Model name )栏中输入:jihuijigou ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框题6-6图⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网 格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺 寸(Size )中的X 和Y 分别设置成750mm 和1000mm ,间距(Spacing ) 中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击动态放大(Dynamic Zoom )图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
2.3 用鼠标左键点击动态移动(Dynamic Translate )图标,在模型窗口中,按住鼠标左键,移动鼠标选择合适的网格。
⒊创建机构的各个部件3.1 在ADAMS/View 零件库中选择 连杆(Link )图标,长度为200mm(mm b200 ),其他参数合理选择。
基于ADAMS的曲柄压力机运动特性分析与仿真曲柄压力机是一种常见的工业机械设备,主要用于薄板或板材的冲孔、拉延、压缩、成型等加工操作。
在机械工程中,对曲柄压力机的运动特性分析与仿真是非常重要的。
本文将详细介绍基于ADAMS的曲柄压力机运动特性分析与仿真。
ADAMS是机械系统动力学仿真软件,通过建立机械系统的数学模型,可以模拟机械系统的运动、力学特性和动态响应过程。
在曲柄压力机的运动特性分析与仿真中,ADAMS可以帮助我们模拟和分析曲柄压力机的运动状态,包括机械结构的刚度、运动的速度和加速度等。
首先,我们需要建立曲柄压力机的数学模型。
根据曲柄压力机的机械结构和运动形式,我们可以将曲柄压力机简化为一个四杆机构,并建立其动力学方程。
同时,为了考虑曲柄压力机的柔度、非线性以及动摩擦等因素,我们还需要加入适当的运动学约束和惯性元素。
接下来,我们将利用ADAMS来进行曲柄压力机的运动特性分析与仿真。
首先,我们可以通过输入不同的工况参数,比如冲压力、行程和轮廓等,来模拟曲柄压力机的不同工作状态。
然后,我们可以通过监测各个关键点的位置、速度和加速度来了解曲柄压力机的具体运动特性。
例如,我们可以通过监测摆架、摆臂和连杆的运动状态,来了解曲柄压力机的转动角度、角速度以及加速度等。
在曲柄压力机的运动特性分析与仿真中,还可以对曲柄压力机的工作效率、动态响应和稳定性等进行进一步的研究。
例如,我们可以通过改变曲柄压力机的结构参数和工作参数,来优化曲柄压力机的工作效率和稳定性;又例如,我们可以通过引入主动控制和自适应控制等技术手段,来优化曲柄压力机的动态响应和抗干扰性能。
总之,在曲柄压力机的运动特性分析与仿真中,ADAMS可以帮助我们全面、系统地了解曲柄压力机的各种运动状态和特性,从而为曲柄压力机的设计、优化和控制提供重要参考。
为了对曲柄压力机的运动特性进行分析,需要收集与之相关的数据,并对数据进行进一步分析。
以下是可能需要收集的数据:1. 曲柄压力机的材料、尺寸和重量。
机械原理及设计(一)a课程设计说明书设计题目:曲柄滑块专业班级: xxx设计者: xxx_____指导教师: xxx温州大学机电工程学院2008 年 6月 25 日内容第一章设计需求1.1设计内容:曲柄滑块机构,曲柄长70mm,连杆长100mm70m m100m m1.2原始数据曲柄的转动速度ω为10rad/s1.3数据要求计算滑块的位移s,速度v,加速度a第二章机构运动分析采用图解法或解析法进行机构的运动分析第三章虚拟样机实体建模与仿真3.1 样机模型建立3.1.1创建样机几何模型1、启动ADAMS双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“Create a new model”,在模型名称(Model name)栏中输入:qubinghuakuai;在重力名称(Gravity)栏中选择“Earth Normal (-GlobalY)”;在单位名称(Units)栏中选择“MMKS –mm,kg,N,s,deg”。
如图1-1 所示。
图1-1欢迎对话框2、设置工作环境(1) 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(setting)下拉菜单中的Unit命令如图设置,点OK再选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y分别设置成300mm 和300mm,间距(Spacing)中的X和Y都设置成10mm。
然后点击“OK”确定。
(2) 用鼠标左键点击选择(Select)图标,控制面板出现在工具箱中。
(3) 用鼠标左键点击动态放大(Dynamic Zoom)图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
3 创建实体(1)在ADAMS/View中零件库中选择连杆图标,点并输入下列坐标值(0.0,0.0,0.0)(70,0.0,0.0)(170,0.0,0.0),如图3-1所示图3-1(2) 在ADAMS/View中零件库中选择连杆图标,参数选择New Part,点选POINT1,POINT2,建立LINK4,再点选POIN2,POINT3建立LINK5,再选择图标,设置depth数值为20,其它设置不选,建立滑块,如图3-2所示;图3-2-1右键,弹出如图3-2-2所示,选marker.marker5的modify,弹出marker modify窗口,设置location的值(150,10,-10)使滑块对称,如图3-2-3所示图3-2-2图3-2-33.1.2添加样机约束副(1)选择,并点选POINT1,建立Revolute接点JOINT1,在画面中显示;再选择Revolute 接點工具, 並修改Construction Mode 为 2 Bod-1 Loc, 並點取PART_3, PART_2和POINT_2,建立JOINT2;再建立点取PART_3, PART_4和POINT3,建立JOINT3(2)选择,修改Construction Mode 为 2 Bod-1 Loc,並點取PART_4, ground和POINT_3,建立JOINT4如图3-3所示3.1.3创建样机运动和动力选择,设定speed为10,点选JOINT_1,建立MOTION_1如图3-4所示图3-43.1.4样机仿真(1)检验检验工具1接点关系检验工具2输出自由度、限制条件等当出现Model verified successfully时,说明模拟成功(2)選擇Simulation 模擬工具, 設定End Time 為 5 秒, 500 Steps輸出, 再點取開始模擬, 結束後可點取Reset 鍵, 回復3.2 模型仿真分析3.2.1测量样机的运动学和动力学参数(1)将鼠标移到滑块上,右击,在弹出菜单中选Marker.cm,再在下级菜单中选Measure,弹出了Point measure对话框,如图5-1-1,5-1-2图5-1-1图5-1-2(2在图5-1-2中的Characteristic栏中选择Translational displacement,在Component栏中选择x,在Measure name 中重命名为.qubinghuakuai.cm_s如图10-5 所示。
《产品设计与虚拟样机》第3次作业姓名:杨绍宝学号:ZY1307307班级:ZY130732013-11-25曲柄滑块机构的虚拟样机参数化建模与仿真杨绍宝ZY1307307(北京航空航天大学北京100191)摘要本文主要是利用软件ADAMS对曲柄滑块机构创建参数化模型,进行建立仿真。
通过改变参数值,观察机构模型的变化。
关键词:ADAMS;曲柄滑块机构;参数化模型.一、曲柄滑块机构的设计要求如课本图4-71所示一对心曲柄滑块机构。
已知曲柄和连杆的初始长度为a= 100mm, b=200mm,试以杆长a,b和曲柄的转角件为可变参数,创建机构的参数化模型,更改参数值杆长变量和曲柄转角变量,观察机构模型的变化。
二、参数化模型建模过程U创建参数化点打开ADAMS软件,新建一个模型,取名为modelzuoye,在主工具箱中选择point工具按钮并双击该选项,展开选项区。
选中Add to ground和Don^ Attach, 单击工作区中心,分别创建三个点,并将这些点更名为POINT.A, POINT_B和POINT_C,如图1所示。
图1创建点2、创建曲柄和连杆构件在主工具箱中选择LinkZ具按钮,展开选项区。
下拉菜单选择“New part”, 不选中Length, Width值输入10和Depth值输入5,分别创建两根杆件,如图2所示。
图2创建完毕的曲柄和连杆3、创建设计变量创建分别表示曲柄和连杆杆长以及曲柄的转角®的三个设汁变量DV_a、DV_b和DV_angleo以设计变量DV_a的创建过程来阐述设讣变量的一般创建过程。
DV」的的创建结果如图3所示。
其创建过程如下:a 选择BuildIDesign VariablelNew 菜单项,弹出Create Design Variable 对话框;b在该对话框中将Name文本框中的DV_1更改为DV_a:c 选择Units 为length;d更改Standard Value文本框中的初始数值为100:e 选择Value Range by 为Absolute Min and Max Values;f将Min Value文本框中的数值更改为0;g将Max Value文本框中的数值更改为+200:h单击Apply按钮,完成设计变量DV_a的创建。
曲柄滑块机构建模与仿真曲柄滑块机构建模与仿真一软件介绍机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)软件是集成建模求解,可视化技术一体的运动仿真软件,是当前世界上使用范围最广,最负盛名的机械系统动力学仿真分析平台。
简称ADAMS。
该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。
ADAMS一方面是虚拟样机分析的应用软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。
它使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
另一方面,又是虚拟样机分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊类型虚拟样机分析的二次开发工具平台。
它分为四个模块:ADAMS/VIEW,ADAMS/Solver,ADAMS/Postprocessor以及ADAMS/Insight。
二几何模型建立建立一个偏置滑块机构,滑块在驱动力的作用下推动滑块运动,滑块曲柄力的作用下做往复运动。
主动杆长度为100mm,偏心距e=60mm,从动杆长300mm;w=3600r/min,两杆的截面尺寸为10mm*25mm,滑块长100mm,底面直径为80mm。
所有构件的材料为铸钢,密度为7800Kg/m3,弹性模量为E=2.02*105MPa,泊松比u=0.3。
1.设置建模环境双击Adams -View图标,启动Adams View程序,建立一个New model,输入Model Name,重力设置选择Earth Normal参数;选择系统默认的工作单位MMKS系统,进入到软件界面,在settings菜单里选择栅格间距及大小,间距设定为10mm。
实验二基于ADAMS的曲柄滑块机构动力学仿真实验一.实验目的1,掌握多体动力学分析软件ADAMS中实体建模方法;2,掌握ADAMS中施加约束和驱动的方法;3,计算出在该驱动作用下滑块运动的位移、速度和加速度。
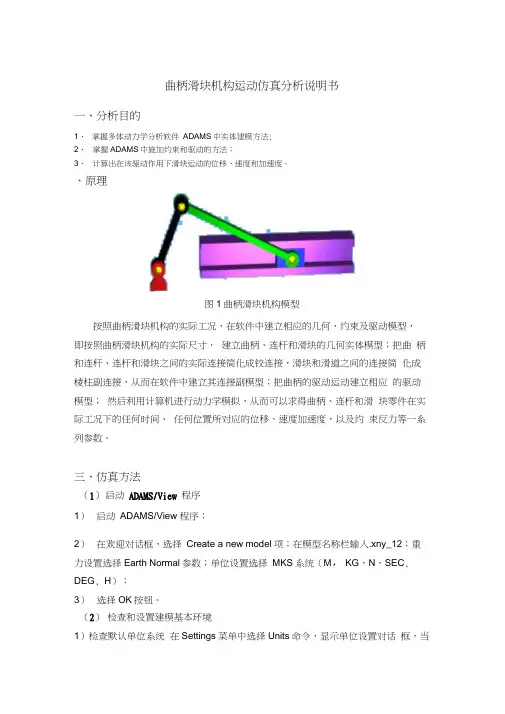
二.实验设备和工具1,PC机一台;2,ADAMS软件;三.实验原理与方法1,ADAMS软件介绍ADAMS软件介绍见实验一2,实验原理图2-1 曲柄滑块机构模型按照曲柄滑块机构的实际工况,在软件中建立相应的几何、约束及驱动模型,即按照曲柄滑块机构的实际尺寸,建立曲柄、连杆和滑块的几何实体模型;把曲柄和连杆、连杆和滑块之间的实际连接简化成铰连接,滑块和滑道之间的连接简化成棱柱副连接,从而在软件中建立其连接副模型;把曲柄的驱动运动建立相应的驱动模型;然后利用计算机进行动力学模拟,从而可以求得曲柄、连杆和滑块零件在实际工况下的任何时间、任何位置所对应的位移、速度加速度,以及约束反力等一系列参数。
3,实验方法(1)启动ADAMS/View程序1)在windows XP的开始启动,选择所有程序,再选择MSC.software,然后选择MSC.ADAMS2005中的Aview,启动ADAMS/View程序;2)在欢迎对话框,选择Create a new model 项;在模型名称栏输入pistonpump;重力设置选择Earth Normal参数;单位设置选择MKS系统(M,KG,N,SEC,DEG,H);3)选择OK按钮。
(2)检查和设置建模基本环境1)检查默认单位系统在Settings菜单中选择Units 命令,显示单位设置对话框,当前的设置应该为MKS系统。
2)设置工作栅格①在Settings菜单,选择Working Grid命令,显示设置工作栅格对话框;②设置Size X=2.0,Size Y=1.0,Spacing X=0.05,Show Working Grid=on;③选择OK按钮。
3)动态调整活动窗口在主工具箱中,选择工具,在窗口内上下拖动鼠标,使之显示整个工作栅格。
目录1 对心曲柄滑块机构的参数化设计 (2)1.1 对心曲柄滑块机构设计及仿真要求 (2)1.2 对心曲柄滑块机构参数化设计 (2)1.2.1 设置参数、工作空间和网格 (2)1.2.2 创建曲柄滑块机构几何模型 (3)1.2.3 添加运动副 (8)1.2.4 添加驱动力 (9)2 对心曲柄滑块机构模型的仿真与测试 (10)2.1 模型仿真 (10)2.2 模型测试 (10)2.2.1 滑块位移测量 (10)2.2.2 滑块速度和加速度测量 (11)2.3 测试结果小结 (12)3 结论 (13)主要参考文献 (13)1 对心曲柄滑块机构的参数化设计1.1 对心曲柄滑块机构设计及仿真要求在图1所示的对心曲柄滑块机构中,已知曲柄为100105cm cm cm ⨯⨯的钢质杆,连杆为200105cm cm cm ⨯⨯的钢质杆,滑块为505050cm cm cm ⨯⨯的钢质正方体,作用在曲柄上的驱动力矩为120M N m =。
(1) 试建立该曲柄滑块机构的虚拟样机模型;(2) 请仿真机构的虚拟样机模型,并测量获得滑块3在020s s 运动时间内的位移、速度和加速度的变化规律。
M 图1 曲柄滑块机构1.2 对心曲柄滑块机构参数化设计1.2.1 设置参数、工作空间和网格根据题目中的数据大小,在建模开始时可以对工作环境进行适当设定,如图2所示:图2 工作空间和网格设置设置为国际单位制,图标大小设置为200。
1.2.2 创建曲柄滑块机构几何模型打开坐标显示窗口,之后按以下步骤创建曲柄滑块机构几何模型(1)创建曲柄单击Link按钮,按图3所示设置曲柄参数,图3 曲柄参数设置在工作区域合适位置、合适方向创建曲柄模型,如图4:图4 曲柄模型将曲柄名称更改为Crank。
(2)创建连杆单击Link按钮,按图5所示设置连杆参数。
图5 连杆参数设置以曲柄上端点为起点,(200,100,0)为终点创建曲柄,如图6。
图6 创建连杆将连杆模型更名为Link。