椭圆形筒体环缝自动焊技术开发
- 格式:pdf
- 大小:157.36 KB
- 文档页数:3
1、〔单选题〕ISO14000标准制定于()年。
( B )A、1992B、1993C、19902、〔单选题〕MUI-1000型自动带极堆焊机制造机械零件时,堆焊层金属不包括()。
( C )A、高合金钢B、不锈钢C、低合金钢3、〔单选题〕下列不会带来爆炸隐患的焊接操作是()。
( A )A、烙铁钎焊B、热割缆切割珊瑚或岩石C、水下氧弧切割4、〔单选题〕下列不适合埋弧焊焊接的是钢板厚度是()mm。
( A )A、2B、4C、65、〔单选题〕下列可用于等离子焊接冷却系统中冷却剂是()。
( A )A、去离子水B、盐水C、电解质溶液6、〔单选题〕下列现象属于燃烧的是()。
( A )A、点燃的火柴B、金属生锈C、生石灰遇水7、〔单选题〕不属于预防火灾与爆炸事故的措施是()。
( C )A、作业完毕应做到认真检查,确认无火灾隐患后方可离开现场B、检查焊件连接部位情况,防止热传导引起火灾事故C、经常检查地锚埋设的牢固程度8、〔单选题〕与氢氧化钠混合能产生剧热的是()。
( C )A、硝酸钾B、氯化铁C、乙醇9、〔单选题〕为便于引弧和提高电弧稳定性,直流正接的等离子弧焊工艺中,电极端部应磨成()。
( A )A、20°至60°的夹角B、<10°的夹角C、70°至80°的夹角10、〔单选题〕二氧化碳气体在高温下发生分解,具有很强的()。
( C )A、分解性B、还原性C、氧化性11、〔单选题〕二氧化碳焊焊接时的电流密度通常为()。
( A )A、100-300A/mm2B、100-200A/mm2C、200-300A/mm212、〔单选题〕全国消防宣传日是()。
( A )A、每年的11月9日B、每年的9月11日C、每年的1月9日13、〔单选题〕关于焊条直径的选择依据,下列说法错误的是()。
( B )A、在不影响焊接质量的前提下,为了提高劳动生产率,一般倾向于选择较大直径的焊条B、厚度较大的焊件,应选用较小直径的焊条C、焊条直径的选择主要取决于焊件厚度、接头型式、焊缝位置及焊接层次等因素14、〔单选题〕冷补焊铸铁时,焊缝为非铸铁型焊缝,所采用的焊接材料是()。

3 4 5焊接圆筒制造通用工艺中南工业学校安装工程系董盛荣摘要:基于工作过程的课程体系开发和核心课程建设的关键就是要根据学生就业岗位的典型任务,提取真实产品的生产工艺,使学生在实际的生产实习和虚拟现实教学中掌握相关的理论知识。
关键词:基于工作过程生产工艺应国家示范学校重点专业建设的要求,我校焊接专业基于工作过程导向的课程体系开发和核心课程的建设已进入实质性阶段,根据本专业的实际情况和我校焊接专业就业岗位群,确定了《焊条电弧焊》、《二氧化碳气体保护焊》、《氩弧焊》、《埋弧自动焊》、《焊接工艺文件的识读与编制》、《焊接检验》、焊接工艺》、《焊接结构生产》八门基于工作过程导向的学习领域课程,前四门是在原实训模块的基础上融入相关的理论知识形成的,后四门是原理论课加入生产性实习和真实产品的制造工艺形成的。
其中《焊接结构生产》是面向学生就业岗位的专业课,必须针对学生的就业岗位的典型工作任务,把真实的企业产品生产搬进课堂。
化工压力容器制造和焊接是本校焊接专业学生的主要就业岗位之一,笔者结合在压力容器厂从事技术、质量工作多年的经验,根据最新颁布的《TSGR0004-2009固定式压力容器安全技术监察规程》、《GB150-2011压力容器》、《NBT47014-2011承压设备焊接工艺评定》、NB-T47015-2011 压力容器焊接规程》等新标准,编制了焊接圆筒制造通用工艺。
本工艺配以课件和相关视频可以用于学生的教学,同时可以用于企业的实际生产。
筒节滚圆、校圆确认钢板经压头、卷圆后坡口在筒体的内外侧是否与焊接工艺一致。
压头时根据钢板材质、焊接变形量合理控制反变形量。
滚圆后用弦长》1/3Di的弧形样板或用三脚R尺,检查筒节曲率,其与样板间隙或与R尺中间脚间隙W 2mm锥段在卷圆时如用小三辊,需在机架上加上保护罩,在大三辊上必须分段卷制,此时在划线时就需划好各等分的射线。
滚圆前,上、下辊表面及钢板表面必须清理干净。
石油化工工程焊接技术的现状和发展趋势摘要:由于石油天然气市场的发展趋势及对化工产品需求量的不断增长,与之相对应的是,越来越多的化工企业、石油储运公司和化工公司开始兴建化工企业和石化仓储基地。
随着我国石油化工工业的不断发展,在管线建设等工程中,焊接技术的发展趋势对石油化工工程的施工非常关键,对焊接质量控制也是石油化工管道施工中一个很重要的环节。
关键词:石油化工工程;焊接技术;发展趋势前言随着科学技术的不断进步,工业化水平逐年提高,传统的手工焊接已经满足不了现代化工程的建设进度和设备参数的高要求了。
顺势而起的自动化焊接技术,在石油化工工程中得到了广泛应用,在工程承压设备领域内预制、现场安装、维护抢修等方面发挥着重要作用,推动了石油化工行业的进步。
1石油化工工程焊接技术的概述1.1焊接概念焊接又称熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料,来实现工件的原子之间永久性连接的制造工艺及技术。
广泛应用于机械,建筑,汽车,船舶,航空航天以及军工军事等制造产业,是现代化工业必不可少的制造技术。
1.2石油化工焊接技术目前我国在石油化工管道采用的焊接技术主要包括半自动焊、自动焊和手工焊。
随着石油化工的不断发展,对石油化工所用的特殊性能材料要求也逐年提高,比如耐低温、耐腐蚀等方面。
因石油化工所用的设备大都是大型化高参数设备,在高温、高容量、高压下作业,对所用的材料需求也是多种多样,不锈钢、高强钢、超高强钢、耐蚀钢、铝合金、耐热钢、耐热合金、各种活性金属、异种钢、钦合金、难熔金属等等,对待不同材料所对应的焊接技术也是不同的。
2石油化工工程焊接技术的应用随着我国工业化程度的不断提升,传统的人工焊接工作方式已不能适应新时代对焊接的需求,手工焊机业的从业人数不断下降。
同时,自动化焊接技术也被广泛地运用到各个行业,对石油化工工程的发展起到了很大的推动作用,提升了石油化工工程设备的预制、安装和维护工作的整体质量。
AP1000CV安全壳底封头焊接技术探讨发表时间:2020-12-02T02:53:44.709Z 来源:《建筑学研究前沿》2020年18期作者:贠伟超张伟强[导读] AP1000反应堆安全壳是反应堆厂房内屏蔽结构,由圆柱形筒体和椭圆形的上、下封头以及安装在其上的贯穿件、设备阀门、人员阀门等组成。
中核工程咨询有限公司北京市 100000摘要:本文对 AP1000 钢制安全壳底封头施工的焊接工艺,组对和焊接顺序、焊接特性、焊接质量问题等方面进行论述,并介绍了AP1000 CV 底封头的安装焊接施工工艺流程及其施工工艺要点,对质量问题进行原因分析和处理措施进行了介绍,对今后其它 AP1000 核电机组 CV 底封头的安装和焊接具有一定的借鉴作用。
关键词:安全壳底封头焊接工艺焊接顺序焊接问题1、前言AP1000反应堆安全壳是反应堆厂房内屏蔽结构,由圆柱形筒体和椭圆形的上、下封头以及安装在其上的贯穿件、设备阀门、人员阀门等组成。
安全壳内径39624mm,高65633.4mm,体积约7000 立方米,重量约3600吨。
属于抗震Ⅰ类,核二级设备。
设计寿命60年。
安全壳的作用是用来包容因核泄露产生的放射性物质,并为正常运行的反应堆堆芯和反应堆冷却系统提供屏蔽。
CV 底封头的结构尺寸大,结构复杂,板材厚,焊接量大,是复杂的焊接壳体结构。
各圈的纵缝数量不同,焊接施工会产生收缩变形,需要通过制定合理的焊接工艺、装配焊接顺序来保证产品尺寸。
2、概述AP1000 安全壳属于 MC 级设备,由底封头、筒体第一环、筒体第二环、筒体第三环和顶封头5大模块组成。
底封头主体共由 64 块板拼接组成,分别由 63 条纵焊缝,3条环焊缝具体,高约 11429.9mm(上口至内底),总重约 575 吨;板材厚度为 41.3mm,材质为SA738Gr.B。
3、焊接性分析根据 ASME Ⅸ材料分组(QW-420)可知,SA738Gr.B 属于 P-NO.1.组 3 号,最小抗拉强度为 85 ksi(约 585MPa),焊接这种低合金钢时,淬硬、冷裂倾向较大,必须进行焊前预热,以防止裂纹出现。
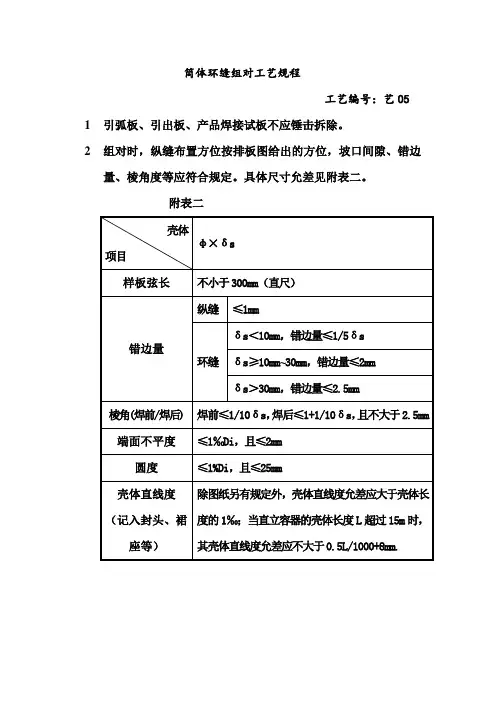
筒体环缝组对工艺规程工艺编号:艺05 1引弧板、引出板、产品焊接试板不应锤击拆除。
2组对时,纵缝布置方位按排板图给出的方位,坡口间隙、错边量、棱角度等应符合规定。
具体尺寸允差见附表二。
附表二3 组对时尽量少用工卡具,确需点焊码铁等工卡具时,应尽量避免机械损伤。
不锈钢、Cr-Mo 钢、低温钢及σs ≥490Mpa 的高强钢所用工卡具拆除后,母材经补焊后打磨平滑用永久记号笔做好标记,以进行磁粉或着色检测。
4 必需焊接工卡具、吊耳时须统一设置,与筒体同材质,不锈钢筒体组对用工卡具可用碳钢,但必需在筒体与工卡具间加薄不锈钢板,减少对母材的损伤。
5 组对前须找正筒节圆度,对刚性较差的筒节,尽量采用专用撑圆组对夹具,并测量端口周长,根据周长进行修复、调整。
组对时须严格控制错边、间隙,并保证错边、间隙的均匀一致性。
撑圆组对夹具安装时需保证夹具轴线相对筒节轴线的同心度,如下图所示:安装时确保夹具宽度方向一半左右伸出筒节端口,且要使6个撑脚顶开高度基本一致。
6 筒节经找正螺杆32=32后,以排板图上焊缝所在位置为基准画出0°、90°、180°、270°中的任一条基准线,再用盘尺按筒节的外圆周长等分四个点分别用样锪或记号笔做好标记。
7对于内件较多的容器和塔器,组对封头端的筒节一端需将外部四条心线用角尺引入筒节内部并用样锪或记号笔做好标记。
8塔体封筒环缝组对时,选用滚胎必需一致,滚胎上同一位置的轮子保持在同一水平面及同一直线上,若组对至某一部位发现刚性特别大时不可强行组对,需检查塔体直线度及滚轮架的水平度及直线度,并进行调整后再行组对。
9浮头式换热器壳体上两大法兰平行度偏差为±2mm,方位以两大法兰眼心对中为准。
10虾米弯环缝组对前可用放地样的方法进行预组对,由于需组对的焊缝形状为椭圆形,因此在组对时必须确保错边量≤1/4δ且不大于2.5 mm,尤其是弯头的内圆周尚有壁厚增加的因素。
课程设计阐明书题目:23m空气储罐旳焊接工艺设计专业年级:姓名:学号:目录绪论...................................................................................................... 第一章压缩空气旳特性............................................................................ 第二章设计参数旳选择............................................................................ 第三章容器旳构造设计............................................................................3.1圆筒厚度旳设计 .....................................................................................................3.2封头厚度旳计算 .....................................................................................................3.3筒体和封头旳构造设计 .........................................................................................3.4接管旳设计 .............................................................................................................3.5鞍座选型和构造设计 ............................................................................................. 第四章强度计算.....................................................................................4.1水压试验应力校核 .................................................................................................4.2圆筒轴向弯矩计算 .................................................................................................4.3圆筒轴向应力计算及校核 .....................................................................................4.4切向剪应力旳计算及校核 .....................................................................................4.5圆筒周向应力旳计算和校核 ................................................................................. 第五章制造工艺.....................................................................................参照文献................................................................................................ 心得体会 ..............................................................................................................................绪论课程设计是一种总结性教学环节,是培养学生综合运用本门课程及有关选修课程旳基本知识去处理某一设计任务旳一次训练。
环缝丝极电渣焊焊接工艺方法环缝电渣焊的构件有压机工作缸、压机柱塞、卷筒、各种罐体或空心轴类等(现统称为筒体)。
1、筒体装配(1)根据工件情况可立装,也可躺装。
(2)用间隙垫可控制装配间隙,可三点式也可四点式,考虑到环缝电渣焊的角变形,最小间隙和最大间隙差一般可控制在4mm,平均间隙见下表。
筒体装配平均间隙(单位:mm)(3)引弧槽为斗式,如下图所示。
▲斗式引弧槽示意图引弧槽上的挡铁在引弧造渣过程中逐个装接,直至建立正常渣池,引弧位置应选在最小间隙附近。
(4)整个筒体在滚轮上装配,滚轮宜采用可驱动式,如不可驱动,则应另附驱动装置。
筒体在滚轮上调整到圆心角为90°。
筒体在滚轮上试运行一周,轴向窜动应<5mm。
(5)筒体连接可用形定位板,也可用间隙垫。
采用形定位板,通常用4块连接;采用间隙垫,其尺寸应为100mm×40mm,焊脚尺寸应大于15mm,一般在筒体质量小于30t时使用。
(6)对于刚度大、裂纹倾向严重的工件应采用预热组装。
(7)其他焊前准备基本上和直焊缝丝极电渣焊相同。
2、焊接(1)引弧造渣首先装好内(外)滑块,引弧从靠近内(外)径开始,引弧电压应比焊接电压高2V,随渣池的扩大,开始摆动焊丝并送入第二根焊丝,随筒体的旋转,渣池扩大,逐个装接引弧挡铁,依次送入第三根焊丝,最后完成造渣过程。
(2)正常焊接在正常焊接过程中,要保持焊接参数的稳定和渣池的稳定。
在工件转动时,应适时割掉间隙垫(或∩形定位板),当焊至1/4环缝时,开始切除引弧槽及附近未焊部分。
切割表面凹凸不平度应在±2mm范围内,并要将残渣及氧化皮清理干净。
气割工件按样板进行,气割结束后立即装焊预制好的引出板。
如发生焊接过程中断,也应控制筒体收缩变形,并采用适当的方式重新建立电渣过程。
(3)焊接收尾当切割线转至和水平轴线垂直时,即停止转动,此时靠焊机上升机构焊直缝,逐个在引出板外侧加条状挡铁。
这一阶段电压应提高1~2V,靠近内径焊丝尽量接近切割线,控制在6~10mm,为防止裂纹,宜适当减小焊接电流,当焊出工件之后即可减小送丝速度和焊接电压,焊接结束后,待引出板冷至200~300℃时,即可割掉引出板。
焊接自动化技术的推广对机械制造业影响的研究摘要本文分析了焊接的机械化和自动化是焊接技术应用发展的必然趋势,介绍了焊接设备的自动化的几大特点,讨论了经销商如何调整自身营销模式来适应焊接设备自动化的产业发展形势,并提出了经销商与国内专业厂商携手推广焊接自动化技术的建议。
关键词焊接技术;机械制造;智能化中图分类号 th16 文献标识码 a文章编号1674-6708(2010)16-0090-021 焊接自动化技术是机械制造业发展的必然趋势近几十年来,焊接工艺已经成为了一种综合科技型的先进制造技术。
焊接工艺在各工业部门应用范围迅速扩大,特别是重大技术装备生产中发挥着举足轻重的作用。
截止2007年,我国焊接结构的用钢量已经突破2亿吨,跃居世界第1位,并成为全球的焊接大国,而我们注意到以下几点事实以及其发展趋势:1)从成本角度来看,由于自动化设备的高效率,尽管人力成本不断高涨,却大大降低了厂家的投入成本。
2)焊接作业特别是弧焊在现代社会被一致公认为是一种有害的工种,并且手工操作的弧焊作业更是一种很容易受到弧光和高温辐射,同时劳动强度较大、人体容易感到疲劳从而不能长时间连续操作的工作。
3)在现代社会随着焊接结构朝重型化、大型化、高参数和精密化的科技化方向发展。
现代工业生产对产品的工艺和焊接质量也必然会提出更高的要求,原来的手工操作已经落伍,很难达到如此高的要求,同时手工操作的低效率和质量的不稳定性,也经常制造了不能按期完成生产计划和产品质量,达成一致性的最大障碍。
4)伴随着着制造业的全球化发展趋势,设备的先进与否和工艺水平高低也正在成为重要的砝码,用来提升公司形象、形成核心竞争力。
2 焊接自动化的主要设备及其特点焊接生产过程的自动化和机械化的关键工序:第一,全部使用自动控制装置和机械装置来实现来替代焊接作业的手工操作;第二,物流、机械手及变位机械来完成将焊件的搬运和位移采用;第三,完成焊接作业将会采用较高的生产节拍和高效的焊接方法进行;第四,通过精确的自动控制和准确的机械动作,进而来确保持持续的稳定的焊接质量。
1原设备及加工工艺及所加工产品的缺陷1.1行业内典型的传统方形环缝焊接专机外形(如)。
1.2传统方形环缝焊接专机结构的组成“01”为焊枪前后左右上下调整机构,“02”为左气保焊焊枪,负责左侧端盖的焊接,“03”为右气保焊焊枪,负责右侧端盖的焊接,“04”为左侧推进座,内装伺服电机,“05”为左侧丝杆,“06”为左侧旋转座,内装伺服电机,负责产品的旋转,以便于焊枪进行焊接,“07”为左侧端盖安装工装,08”为产品的左侧端盖,产品装夹时,“08”左侧端盖安装在图1典型产品图图2方形环缝焊专机图3方形环缝焊专机产品与气保焊焊枪移动轨迹“17”为气保焊焊枪,“18”为产品筒体,“20”为焊丝,可以看到随着筒体的运转,气保焊焊枪枪口不能平行于筒体外形,这就导致了焊接缺陷。
③以上两项设备缺陷,经常会导致撞枪、气孔、漏焊、未熔合、未焊透、裂纹、咬边、凹坑、焊瘤等焊接缺陷,严重时会导致产品报废。
2我公司改进后的方形环缝焊机“21”为松下TM-1400型焊接机器人,及欧姆龙视觉系统FZ5-L350型摄像头,及配套光源,其余部分不变。
操作步骤为产品重复在原设备上的装夹、定位、合盖、旋转后,焊接机器人在视觉摄像头的指引下,对产品进行随形跟踪焊接。
2.2焊接机器人和视觉摄像头和光源系统(如图6)“22”为欧姆龙视觉系统FZ5-L350型摄像头,“23”为光源,“24”为气保焊枪,“25”为松下TM-1400型焊接机器动按程序控制,并能在三维空间完成各种复杂焊接作业的自动化生产设备,可以在恶劣的环境下连续工作,焊接质量,可以提高工作效率,极大的减轻工人操作强度。
本项目改造采用的是唐山松下生产的TM-1400接机器人,是一款6轴焊接机器人,作业半径为1.4有焊丝自动回抽、起弧重试、焊缝搭接、粘丝解除、摆动、平移+RT轴平移、显示运枪角度(焊枪姿态调整图4当产品旋转时气保焊焊枪枪口与产品间的位置图5改造后安装了视觉系统与焊接机器人的环缝焊机图6视觉焊接机器人系统图7视觉系统引导的控制界面[2]赵嘉华.焊接检验[M].机械工业出版社,2005.[3]马香峰.机器人机构学[M].机械工业出版社,1991.[4]王锐.焊接机器人控制系统研究分析[J].电子世界,2013(2):166-168.图8视觉系统控制下的气保焊枪图9视觉系统控制下的枪口位置。