PLC的矿井提升机控制系统设计方案
- 格式:docx
- 大小:378.94 KB
- 文档页数:12
1 前言1。
1 提升机的发展过程及现状向矿井提升机是铁矿安全生产的关键设备之一,其作用是提升矿粉、升降人员和下放物料等,在整个铁矿生产中占有十分重要的地位.矿井提升机安全、可靠、高效、准确地运行集中体现在其电气控制系统中,电控系统性能的优劣直接影响全矿的安全生产及矿工生命的安全。
现代矿井提升机的发展与现代电力传动及其控制技术的发展密切相关.根据受控电动机类型的不同,矿井提升机可分为直流驱动提升机和交流驱动提升机两大类。
由于交流电动机有结构简单、紧凑、坚固、容量大、价格低廉、应用场合广泛和直接使用交流三相电源等优点,因而交流驱动提升机得到了广泛的应用。
在20世纪70年代前,矿井提升机大多采用交流驱动系统,但是由于其调速能力较差,很难适用于调速性能要求较高的场合。
直流电动机具有良好的启、制动性能,可在大范围内平滑调速,调速性能指标远优于交流电动机,因此在20世纪70年代后,随着大功率可控硅的使用、电子控制技术和装置的发展,直流驱动提升机逐渐在大中型铁矿中占据了主导地位。
随着电力电子器件、微电子控制技术和交流调速控制理论的发展,交流驱动逐渐获得了与直流驱动相同的控制特性,并在高性能交流驱动应用中获得了根本性的突破,成为大容量提升机的首选方案。
目前国内铁矿企业,井下提升机大多采用交流绕线式异步电动机转子串电阻的调速方案.提升机电控系统经历了由继电器控制、分离元件控制、模拟电路控制到微电子(计算机)控制的发展历程,目前数字控制系统已广泛应用于提升机控制系统中。
采用数字控制技术后,提升机电控系统具有结构简单、控制精度高、系统功能开发简单等优点;特别是其具有智能化的信息采集、故障诊断和在线检测等功能,极大地提高了系统的可靠性,缩短了查找和排除故障的时间,降低了维护成本。
1。
2 主要存在的问题虽然交流提升机在调速性能上获得了根本性的突破,成为大容量提升机的首选方案,但是由交流电动机的基本原理可知,由定子传入转子的电磁功率Pm可分为两部分:一部分是驱动负载的有效功率P=(1-s)Pm;另一部分是转差功率P=sPm,与转差率s成正比.根据转差功率的大小及消耗情况,交流调速系统可分为如下三类:(1)转差功率消耗型调速系统:全部转差功率都被转换成热能而消耗掉。
目录摘要 (III)关键词 (III)Abstract (IV)Keywords (IV)第1章绪论............................................................. - 1 -1.1国内外矿井提升机发展现状......................................... - 1 -1.1.1国内矿井提升机电气控制系统的现状........................... - 1 -1.1.2国外提升机电气控制系统的现状............................... - 2 -1.2课题研究的目的和意义............................................. - 3 -1.3本论文承担的任务................................................. - 4 -1.4小结............................................................. - 5 - 第2章矿井提升机调速控制系统分析....................................... - 6 -2.1引言............................................................. - 6 -2.2提升机工作原理及机械结构......................................... - 6 -2.3提升机调速控制方式及调速性能分析................................. - 7 -2.3.1提升机直流调速性能分析..................................... - 7 -2.3.2提升机交流调速性能分析..................................... - 8 -2.4提升机调速控制方案分析........................................... - 9 -2.4.1传统转子回路串电阻调速系统................................ - 10 -2.4.2模糊控制调速系统.......................................... - 10 -2.4.3直接转矩控制系统.......................................... - 11 -2.4.4矢量控制变频调速系统...................................... - 12 -2.5小结............................................................ - 14 - 第3章提升机调速控制系统硬件实现...................................... - 15 -3.1引言............................................................ - 15 -3.2提升机电控系统总体结构.......................................... - 15 -3.3提升机电控系统变频器选择........................................ - 17 -3.4变频控制部分设计................................................ - 17 -3.4.1变频调速主系统设计........................................ - 17 -3.4.2变频器外部电路设计........................................ - 20 -3.5 PLC控制部分设计................................................ - 24 -3.5.1基本控制功能.............................................. - 24 -3.5.2位置检测电路.............................................. - 28 -3.6硬件调速控制系统保护措施........................................ - 29 -3.6.1热继电器过载保护.......................................... - 30 -3.6.2调速控制系统抗干扰处理.................................... - 31 -3.7小结............................................................ - 33 - 第4章提升机调速控制系统软件实现...................................... - 34 -4.1引言............................................................ - 34 -4.2矿井提升机中S型速度曲线建模及实现.............................. - 34 -4.2.1速度曲线的选择及给定方法.................................. - 34 -4.2.2提升机理想S形速度曲线数学模型............................ - 35 -4.2.3理想速度曲线的实现........................................ - 39 -4.3调速控制系统软件流程............................................ - 42 -4.4小结............................................................ - 44 - 第5章全文总结........................................................ - 45 -5.1提升机电控系统主电路部分........................................ - 45 -5.2控制系统软件设计部分............................................ - 45 -5.3提升机速度控制理论分析及抗干扰保护.............................. - 46 - 参考文献............................................................... - 47 - 致谢................................................................... - 48 -基于PLC的矿井提升机变频调速系统设计摘要传矿井提升机是煤矿安全生产的关键设备之一,其作用是提升煤炭、矸石,升降人员和下放物料等,在整个煤矿生产中占有十分重要的地位。

1 引言目前,我国绝大部分矿井提升机〔超过70% 〕采用传统的交流提升机电控系统〔tkd-a为代表〕。
tkd控制系统是由继电器逻辑电路、大型空气接触器、测速发电机等组成的有触点控制系统。
经过多年的发展,tkd-a系列提升机电控系统虽然已经形成了自己的特点,然而其不足之处也显而易见,它的电气线路过于复杂化,系统中间继电器、电气接点、电气联线多,造成提升机因电气故障停车事故不断发生。
采用 plc技术的新型电控系统都已较成功的应用于矿井提升实践,并取得了较好的运行经验,克服了传统电控系统的缺陷,代表着交流矿井提升机电控技术发展的趋势。
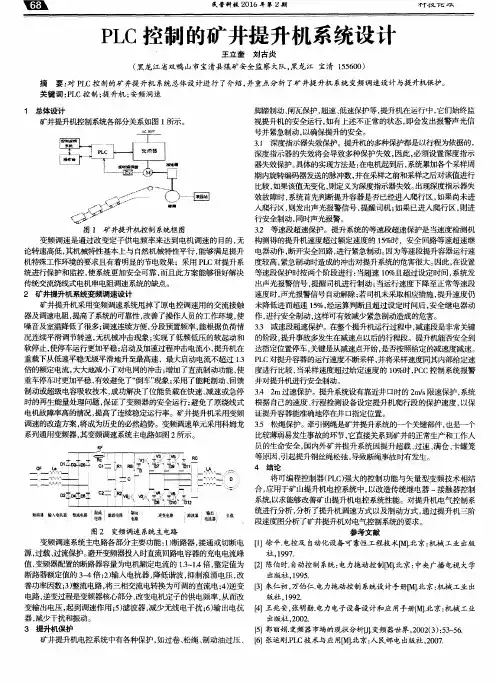
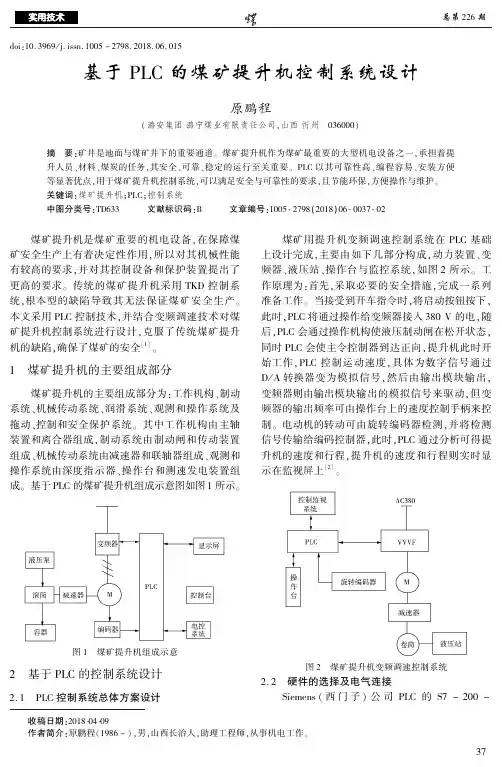
2 总体设计方案基于plc技术的矿井交流提升机电控系统控制电路组成结构如图1所示,要由以下5部分组成:高压主电路〔包括高压换向器、电动机、启动柜、动力制动电源〕、主控plc电路、提升行程检测与显示电路、提升速度检测、提升信号电路,其中高压主电路部分仍采用传统的继电器控制电路。
图1 矿井交流提升机电控系统框图工作过程:当井口或井底通过信号通信电路发出开车信号后,开车条件具备。
司机将制动手柄向前推离紧闸位置,主电动机松闸。
司机将主令控制器的操作手柄推向正向〔或反向〕极端位置,主控plc通过程序控制高压换向器首先得电,使高压信号送入主电动机定子绕组,主电动机接入全部转子电阻启动,然后依次切除8段电阻,实现自动加速,最后运行在自然机械特性上。
交流提升机运行时,旋转编码器跟随主电动机转动,输出2列a/b相脉冲,分别接到主控plc的高速计数器hsc0的a/b相脉冲输入端,由主控plc根据a/b脉冲的相位关系,自动确定hsc0的加、减计数方式。
根据hsc0的计数值,就可以计算出提升行程并显示。
同时只根据旋转编码器输出的a相脉冲,主控plc进行加计数。
根据hsc1在恒定间隔时间内的计数值,就可以计算出提升速度。
3 硬件设计3.1 提升机主回路部分设计主回路用于供应提升电动机电源,实现失压、过流保护,控制电机的转向和调节转速。
目录引言................................................ 错误!未定义书签。
第一章传统矿井提升机电控系统. (2)1.1 传统矿井提升机电控系统概述 (2)1.2 矿井提升机电控系统的组成 (2)1.2.1 TKD-A电控系统的主回路 (2)1.2.2 TKD-A电控系统的控制系统 (3)1.3 提升机电气控制方式 (6)1.3.1 提升机运行速度图 (6)1.3.2 提升机的运行过程 (7)1.4 传统矿井提升机电气控制系统存在的问题 (12)第二章电控系统PLC改造设计 (13)2.1电控系统PLC改造的意义 (13)2.2电控系统PLC改造总体方案 (13)2.3 PLC控制系统的组成及各部分的功能 (15)2.3.1 PLC控制系统的组成 (15)2.3.2 PLC控制系统各部分的功能 (15)2.4 PLC的选择及I/O点的分配 (16)2.4.1 PLC的选择 (16)2.4.2 确定系统的输入设备和输出设备 (16)2.4.3 S7-300 PLC接线图 (18)2.4.4 PLC与其他原元件的对应关系 (18)2.5 PLC电控系统原理设计 (23)2.5.1 主控逻辑电路 (24)2.5.2 可调闸动力制动电路 (24)2.5.3 信号检测控制仪电路 (26)2.5.4 加速电阻切换接触器柜 (27)2.5.5 高压换向动力制动切换柜 (27)2.5.6 动力制动电源 (28)2.6 工作过程介绍 (28)2.6.1 开车前准备 (28)2.6.2 速度图的实现 (28)2.6.3 各阶段的实现 (29)2.7 结构化程序编制 (31)2.7.1 软件结构 (31)2.7.2结构化梯形图程序编制 (31)2.7.3 语句表程序编制 (3232)第三章工艺设计 (33)3.1 设备平面布置示意图.......................... 错误!未定义书签。
目录引言................................................. 错误!未定义书签。
第一章传统矿井提升机电控系统. (2)1.1 传统矿井提升机电控系统概述 (2)1.2 矿井提升机电控系统的组成 (2)1.2.1 TKD-A电控系统的主回路 (2)1.2.2 TKD-A电控系统的控制系统 (3)1.3 提升机电气控制方式 (6)1.3.1 提升机运行速度图 (6)1.3.2 提升机的运行过程 (7)1.4 传统矿井提升机电气控制系统存在的问题 (12)第二章电控系统PLC改造设计 (13)2.1电控系统PLC改造的意义 (13)2.2电控系统PLC改造总体方案 (13)2.3 PLC控制系统的组成及各部分的功能 (15)2.3.1 PLC控制系统的组成 (15)2.3.2 PLC控制系统各部分的功能 (15)2.4 PLC的选择及I/O点的分配 (16)2.4.1 PLC的选择 (16)2.4.2 确定系统的输入设备和输出设备 (16)2.4.3 S7-300 PLC接线图 (18)2.4.4 PLC与其他原元件的对应关系 (18)2.5 PLC电控系统原理设计 (23)2.5.1 主控逻辑电路 (24)2.5.2 可调闸动力制动电路 (24)2.5.3 信号检测控制仪电路 (26)2.5.4 加速电阻切换接触器柜 (27)2.5.5 高压换向动力制动切换柜 (27)2.5.6 动力制动电源 (28)2.6 工作过程介绍 (28)2.6.1 开车前准备 (28)2.6.2 速度图的实现 (28)2.6.3 各阶段的实现 (29)2.7 结构化程序编制 (31)2.7.1 软件结构 (31)2.7.2结构化梯形图程序编制 (31)2.7.3 语句表程序编制 (3232)第三章工艺设计 (33)3.1 设备平面布置示意图........................... 错误!未定义书签。
矿井提升机的PLC设计目录摘要 (I)Abstract ............................................................................................................... I I 第1章绪论. (1)1.1 国内外矿井提升机研究现状与发展趋势 (1)1.2 课题研究目的和意义 (2)1.3 课题研究内容 (3)第2章系统控制方案设计 (4)2.1 控制单元基本原理 (4)2.2 控制系统总体设计 (6)2.3 可编程控制器(PLC)介绍 (7)2.3.1 PLC的基本特点 (7)2.3.2 PLC的基本结构 (8)2.3.3 PLC的工作原理 (9)2.3.4 可编程控制器的编程语言 (10)2.4 变频器介绍 (11)2.4.1 变频调速基本原理 (11)2.4.2 变频器按中间直流环节方式分类 (13)2.5 本章小结 (14)第3章控制系统硬件设计 (15)3.1 PLC的选型及特点 (15)3.2 变频器的选型及参数设置 (16)3.3 旋转编码器的选型及接线方式 (17)3.4 电动机的选择及参数 (18)3.5 变频调速主电路设计 (19)3.6 PLC控制系统设计 (21)3.7 本章小结 (23)第4章控制系统软件设计 (24)4.1 控制程序流程图 (24)4.2 系统控制程序梯形图 (25)4.3 本章小结 (26)第5章人机交互界面 (27)5.1 触摸屏概述 (27)5.2 触摸屏在工业控制中的应用 (27)5.3 PWS-3261触屏简介 (28)5.4 触摸屏在矿井提升机控制系统中的应用 (29)5.5 本章小结 (30)结论 (31)参考文献 (32)致谢 (34)附录 A (35)第1章绪论1.1 国内外矿井提升机研究现状与发展趋势矿井提升机是机、电、液一体化的大型机械,广泛用于煤矿的竖井、斜井,是生产运输的主要工具。
基于PLC矿井提升机控制系统设计矿井提升机控制系统是矿井生产过程中非常重要的一环,它的设计与实现对于安全、高效的矿井生产具有重要意义。
基于PLC的控制系统设计能够更好地实现对提升机的精确控制。
本文将探讨基于PLC的矿井提升机控制系统的设计。
一、系统总体设计矿井提升机控制系统的总体设计包括硬件设计和软件设计两个方面。
硬件设计方面,需要选择适合的PLC控制器和外围设备。
PLC控制器一般采用可编程逻辑控制器,因为PLC具有稳定性好、可靠性高、可编程性强等优点。
外围设备包括传感器、执行器等,用于对矿井提升机的状态进行检测和控制。
软件设计方面,需要编写PLC程序来实现对矿井提升机的控制。
软件设计应该包括以下几个基本要素:1.输入接口:用于接收外部输入信号,如压力、温度等传感器信号。
2.输出接口:用于输出控制信号,如电机启停、行走控制等。
3.逻辑控制:实现对提升机的自动控制,包括启停、速度调节等功能。
4.保护控制:实现对提升机的各种保护功能,如超载保护、温度保护等。
5.监控功能:实现对提升机运行状态的实时监控,包括显示当前状态、报警功能等。
二、具体控制功能设计1.提升机启停控制:根据生产需要,通过PLC程序控制提升机的启停。
2.提升机速度控制:通过调节电机频率,实现提升机运行速度的调节。
3.提升机方向控制:通过控制电机正反转,实现提升机的正向运行和反向运行。
4.紧急停止控制:提供紧急停止按钮,一旦发生紧急情况,通过PLC程序实现提升机的紧急停止。
5.温度保护控制:对提升机电机进行温度检测,一旦温度过高,通过PLC程序发出警报信号并停止提升机的运行。
6.超载保护控制:对提升机进行负载检测,一旦检测到负载超过额定负载,通过PLC程序发出警报信号并停止提升机的运行。
7.撞击保护控制:安装撞击传感器,一旦检测到撞击信号,通过PLC程序发出警报信号并停止提升机的运行。
8.状态监测与显示:通过PLC程序实时监测提升机的运行状态,如电机转速、负载情况等,并通过显示器显示相关信息。
基于PLC的矿井提升机变频调速控制系统设计摘要本文针对提升机控制系统中存在的上述问题,把可编程序控制器和变频器应用于提升机控制系统上,并在可行性方面进行了较深入的研究。
根据提升机的运行特点,控制系统采用工控机监控提升机变频调速系统, PLC控制系统、变频调速系统等组成。
为了提高系统的可靠性,对提升机各种物理量及控制单元进行控制监控。
提升机的动态监测由工控机或触摸屏和组态软件组成.用户在组态环境中完成动画设计、设备连接、编写控制流程和工程所需要的信息报表以及结果打印等。
主控系统采用PLC系统,硬件简洁、软件灵活性强、调试方便、维护量小,配合一些专用电子模块组成的提升机控制设备,可供控制高压带动动力制动或低频制动等。
同时能检测各电机故障现象并送往上位机显示。
减少了传统继电器接触式控制系统的中间环节,减少了硬件和控制线,极大提高了系统的稳定性,可靠性。
关键词:矿用提升机;变频调速;矢量控制;可编程控制器The Freouency Conversion Use on The Speed Adjustment of Shaft Hoist on The Basis of PLC ControlABSTRACTElevator Control System In this paper, the above problems exist in the PLC and frequency converter used in elevator control system,and for a more in—depth feasibility study. According to the operation of hoist features,the control system IPC VVVF elevator control system,PLC control systems, frequency control system components. In order to improve system reliability,and various physical quantities on the elevator control unit to control monitoring。
基于plc的矿井提升机调速控制系统设计摘要:本文主要介绍了基于 PLC 的矿井提升机调速控制系统的设计及其实现。
该系统采用了三菱 FX3U 系列 PLC 作为控制主机,利用变频器对提升机的电机进行控制,实现了电机的有序启停和调速功能。
通过对系统进行仿真和实际测试,证明了该系统的稳定性和可行性,具有较高的应用价值。
关键词:PLC,提升机,调速控制,变频器1.引言矿井提升机作为矿井井下运输系统中的一种主要设备,其稳定性和可靠性对矿山产能和生产效率具有重要影响。
目前,国内外矿井提升机控制系统的设计和研发已经得到了广泛的关注和开发,通过对传统矿井提升机控制系统进行升级和改进,不仅可以大幅提高矿井提升机的运行效率,还可以降低管理成本、提高安全性。
本文基于 PLC 技术,设计了一种可控的矿井提升机调速控制系统。
该系统利用 PLC 控制器和变频器对提升机的电机进行控制,实现了提升机电机的有序启停和调速功能。
通过对该系统进行仿真和实际测试,证明了该系统具有高度的稳定性和可靠性,具有较高的应用价值。
2.系统设计2.1系统结构图 1 所示为基于 PLC 的矿井提升机调速控制系统的结构框图。
系统分为三个部分:上位机、PLC 控制器和提升机电机。
其中,上位机负责控制系统的运行状态和参数设置;PLC 控制器利用变频器对提升机电机进行控制;提升机电机通过传感器检测提升机的运行状态,并将状态反馈给 PLC 控制器。
2.2系统功能该系统主要实现以下功能:(1)控制提升机电机的有序启停和调速功能。
(2)通过传感器检测提升机的运行状态,并将状态反馈给 PLC 控制器。
(3)实现上位机对系统参数的设置和监测。
3.系统实现3.1PLC 编程在本系统中,采用三菱 FX3U 系列 PLC 作为控制主机,使用 GX Works2 编程软件进行编程。
PLC 主要负责控制变频器的输出频率,实现提升机的有序启停和调速控制。
程序流程如下:(1)初始化:读取提升机电机的初始状态;(2)监测信号:通过传感器检测提升机的状态,并将状态反馈给 PLC 控制器;(3)参数设置:上位机通过 Modbus 协议向 PLC 控制器输入控制参数;(4)控制变频器:根据输入的控制参数计算出变频器的输出频率,控制提升机电机的速度;(5)循环:根据变频器的输出频率不断调整提升机的运行状态。
基于PLC的矿井提升机变频调速控制系统设计摘要本文主要设计了矿井提升机的变频调速系统以及PLC控制系统。
通过对矿井提升机调速系统要求的分析,说明了采用变频调速的重要性。
在对各种变频调速方法的分析比较后,选择采用交流变频调速,然后选择变频器的类型,并按调速系统要求设计了变频器的外部电路。
通过对其电控系统各类故障处理的要求,选择采用可编程控制器(PLC),并对可编程控制器进行选型.考虑到实际生产中可能出现的问题,合理的设计可编程控制器(PLC)的外部电路,并在此基础上对可编程控制器(PLC)程序做出初步的设计方案,为了保证可编程控制器(PLC)的可靠工作,将其系统抗干扰措施也设计在内.本文只是初步理论设计,并未应用于实践,在应用于实践前必须对其进行实践验证。
关键词:矿井提升机,变频调速,变频器,PLCMine hoister based on PLC variable frequency speed controlsystem designABSTRACTThis article mainly design of mine hoist the variable frequency speed control system and PLC control system。
Based on the mine hoist control system requirements analysis,illustrates the importance of using variable frequency speed regulation。
In a variety of frequency conversion speed regulation method of analysis and comparison, selection using AC frequency converter,and then select the types of frequency converters, and according to the speed control system is designed the external circuit of frequency converter。
摘要矿井提升机是矿山最重要的设备,肩负着矿石、物料、人员等的运输责任。
传统的矿井提升机控制系统主要采用继电器一接触器进行控制,这类提升机通常在电动机转子回路中串接附加电阻进行启动和调速。
这种控制系统存在可靠性差、操作复杂、故障率高、电能浪费大、效率低等缺点。
因此对矿井提升机控制系统进行研究具有现实意义。
本文针对提升机控制系统中存在的上述问题,把可编程序控制器和变频器应用于提升机控制系统上,并在可行性方面进行了较深入的研究。
论文根据矿用提升机的运行特性要求,对变频器和PLC 进行选型,并对系统的软、硬件进行设计,其中包括检测模块、控制模块、保护模块、显示模块和抗干扰模块的设计,最后进行系统集成和调试。
运行表明,采用该控制系统,使提升机工作可靠,使用方便,同时具有动态显示的功能,节能效果明显。
关键词:PLC,矿用提升机,变频调速AbstractThe shaft hoist is the foremost equipment of mines,it is widely used to transport the materials,staff and equipment.The traditional shaft hoist control system is always controlled by the relay-contactor,and adopts the methods of connect series additional resistant in rotor’s winding loop to start and adjust speed.The system has many disadvantages such as bad reliability,complicated operation,high fault rate,large energy-wasting and low efficiency.So,carrying on the research on the shaft hoist control system has realistic meanings,and it is a subject for research by relevant experts and scholars’ both at home and abroad too.To these questions existing in the shaft hoist control system,the paper applied PLC(Programmable Logic Controller)and frequency converter to the system,and have carried on deeper research in feasibility.Paper based on the operation of mining properties hoist requirements,the selection of frequency converter and PLC,and the system software and hardware design. Including the detection module,control module,protect module,display module and anti-jamming module design,the final system integration and debug.The tuning indicates,adopting this control system. the shaft hoist works reliably,easy to use,energy-saving well,and have dynamical shown function.Key Words:PLC(Programmable Logical Controller),shaft hoist,frequency conversion目录摘要 (I)Abstract (II)1 绪论 (1)1.1 设计来源 (1)1.2 国内外提升机发展状况 (1)1.3 设计内容及意义 (2)1.3.1 设计内容 (2)1.3.2 设计意义 (3)2 基于PLC的矿井提升机变频调速系统 (4)2.1 PLC简介 (4)2.2 变频调速 (5)2.2.1 变频调速的基本原理 (5)2.2.2 变频器 (6)2.2.3 矿井提升机 (8)2.2 总体设计 (9)3矿井提升机变频调速系统硬件设计 (13)3.1 矿井提升机及电机的选型 (13)3.1.1 箕斗的选定 (13)3.1.2 预选提升电机 (13)3.1.3 参数计算 (14)3.1.4 电机容量校核 (17)3.2 变频器的选型 (18)3.3 PLC的选型 (23)3.3.1 I/O点统计 (23)3.3.2 PLC的选型 (25)3.3.3 PLC外围电气控制 (27)4 矿井提升机变频调速系统软件设计 (30)4.1 程序设计 (30)4.2 系统抗干扰措施 (33)4.2.1 变频器的干扰及其防止 (33)4.2.2 PLC的抗干扰 (33)总结 (35)参考文献 (37)致谢 (38)附录A 系统总原理图 (39)附录B 程序(部分) (40)1 绪论1.1 设计来源矿井提升机是机、电、液一体化的大型机械,广泛用于煤炭、金属、化工等矿山的竖井、斜井中,是生产运输的主要工具。
基于PLC的煤矿提升机电控系统设计摘要:电控系统是煤矿提升机的核心构成要素,本文基于PLC的煤矿提升机电控系统设计为主要的研究对象,通过介绍电控系统的构成、控制模式以及总体设计分析等内容,以期达到对设计总体方案的实际应用效果,实现提升机运行的稳定性与安全性,进而升级我国煤矿提升机电控系统设计的整体应用水平。
关键词:PLC;电控系统;煤矿提升机;设计方案一、电控系统的构成通常情况下,成套的电控系统包括高压配电系统、低压配电系统、安全保护系统、操作系统、监控系统以及全数字变流驱动系统几种。
而主电控系统主要包含了电源电路、PLC保护回路、驱动电路以及控制回路等。
其中,电源回路通过将交流电源转变为直流电源,借助于变频器创建新的电源电路,有效增强整个电源工作的高效性与可靠性;PLC保护回路则是利用跳闸、合闸级基本回路特征与要求,采取一定的措施对PLC进行过流过压的保护;驱动电路主要用来放大控制电路的信号,使其能够驱动功率晶管体,也就是通过PLC的输出回路驱动提升机的构件来完成预期的控制动作。
通过可控的电控系统组件,实现对煤矿提升机的供电功能。
二、电控系统的控制模式基于PLC的煤矿提升机电控系统,其控制模式主要分为信号采集系统与上位机监控系统。
信号采集系统主要负责对煤矿提升机各项工作参数与状态参数的实时采集。
在此过程中,采集参量中模拟量通过PLC的入口进入到内部,数字参量的数字量通过PLC的开关量入口进入到内部,再由PLC内部的相关程序设定完成对煤矿提升机各项工作参数与状态参数的分析与处理,之后再传输到上位机,实现对参数的显示。
上位机监控是以计算机为主要载体,通过特定的上位机显示控制程序,对远程采集到的工作参数与状态参数进行实时显示[1]。
另外,还能够通过对远程控制指令的下达,完成对煤矿提升机的远程电控。
三、煤矿提升机电控系统的总体设计分析煤矿提升机作为矿井底部生产运输的重要设备,对井下煤矿的物资运输以及人员运输起着至关重要的作用。
总第214期2021年第2期机械管理开发MECHANICAL MANAGEMENT AND DEVELOPMENTTotal214No.2,2021自动化技术与设计D01:10.16525<l4-1134/th.2021.02.090基于PLC的煤矿提升机控制系统设计张旭(晋能控股煤业集团有限公司马脊梁矿,山西大同037027)摘要:为提高煤炭生产安全性和高效性,进一步提高煤矿生产自动化水平,设计了基于PLC的煤矿提升机控制系统。
通过研究变频器控制原理,完成硬件电路设计和软件程序优化实现对提升过程的控制、ModBus通信及监控功能,通过增加过载、超速等监测装叠,提高煤矿井下生产设备控制系统稳定性和安全性。
关键词:煤矿提升机PLC控制中图分类号:TD421.5文献标识码:A文章编号:1003-773X(2021)02-0206-03引言煤炭作为我国主要能源来源,其安全高效生产对于能源安全至关重要,煤矿提升机作为煤炭开采运输的重要组成部分,担负着矿井上下人员快速安全运输的重要任务切。
机械化采煤装置的大规模使用进一步提高了煤矿生产效率和自动化水平,并极大地节省了人力物力,同时随着生产水平的提高,对控制系统的安全性和可靠性要求进一步提高,传统继电控制系统主导的控制系统难以满足生产需求閃。
为了进一步提高煤矿提升机系统控制的自动化水平,增强煤炭生产运输过程的精确性和可靠性,需要使用PLC数字控制技术,其具有编程语言直观、抗干扰能力强、系统稳定性好、便于功能添加等优点,更适应于煤矿井下的复杂生产环境。
1控制系统整体方案为确保提升工作安全进行,煤矿提升机系统(见图1)主要由以下6部分组成:执行单元、减速单元、制动单元、润滑单元、电子控制单元和保护单元等,其中执行单元由轴承、卷筒及其附属基座等结构构成,主要完成负载力矩输出并达到提升物品的目的;减速单元通过调节齿轮转速转比,完成输出力矩的调节,从而调整提升速度;制动单元作为平稳控制执行单元停止的装置,主要由盘式制动器组成;润滑单元控制润滑油的输送量完成系统整体运行摩擦力和设备温度的调节工作,保证设备的机械性能满足运行要求并提高其使用寿命叫电子控制单元在传感器采集数据的基础上,对提升机的位置、速度等当前状态信息进行判断,利用既定策略完成对提升机的启动、运行、停止的控制;保护单元通过旋转编码器等装置检测当前系统状态,防止发生失速、超载等故障,保证系统运行安全凶。
基于 PLC 的矿井提升机控制系统设计2010-2-9 20:25:00 来源:1 引言目前,我国绝大部分矿井提升机(超过 70% )采用传统的交流提升机电控系统(tkd-a 为代 表)。
tkd 控制系统是由继电器逻辑电路、大型空气接触器、测速发电机等组成的有触点控制系统。
经 过多年的发展,tkd-a 系列提升机电控系统虽然已经形成了自己的特点,然而其不足之处也显而易见, 它的电气线路过于复杂化,系统中间继电器、电气接点、电气联线多,造成提升机因电气故障停车事 故不断发生。
采用 plc 技术的新型电控系统都已较成功的应用于矿井提升实践,并取得了较好的运行经 验,克服了传统电控系统的缺陷,代表着交流矿井提升机电控技术发展的趋势。
2 总体设计方案基于 plc 技术的矿井交流提升机电控系统控制电路组成结构如图 1 所示,要由以下 5 部分组成:高压主电路 (包括高压换向器、电动机、启动柜、动力制动电源)、主控 plc 电路、提升行程检测与显示电路、提 升速度检测、提升信号电路,其中高压主电路部分仍采用传统的继电器控制电路。
图 1 矿井交流提升机电控系统 框图 工作过程:当井口或井底通过信号通信电路发出开车信号后,开车条件具备。
司机将制动手柄向前推 离紧闸位置,主电动机松闸。
司机将主令控制器的操作手柄推向正向(或反向)极端位置,主控 plc 通 过程序控制高压换向器首先得电,使高压信号送入主电动机定子绕组,主电动机接入全部转子电阻启 动,然后依次切除 8 段电阻,实现自动加速,最后运行在自然机械特性上。
交流提升机运行时,旋转 编码器跟随主电动机转动,输出 2 列 a/b 相脉冲,分别接到主控 plc 的高速计数器 hsc0 的 a/b 相脉冲输 入端,由主控 plc 根据 a/b 脉冲的相位关系,自动确定 hsc0 的加、减计数方式。
根据 hsc0 的计数值,就 可以计算出提升行程并显示。
同时只根据旋转编码器输出的 a 相脉冲,主控 plc 进行加计数。
根据 hsc1 在恒定间隔时间内的计数值,就可以计算出提升速度。
3 硬件设计 3.1 提升机主回路部分设计主回路用于供给提升电动机电源,实现失压、过流保护,控制电机的转向和 调节转速。
主回路由高压开关柜、高压换向器的常开触头、动力制动接触器的常开主触头、动力制动 电源装置、提升电动机、电机转子电阻、加速接触器的常开主触头(1jc~8jc)和装在司机操作台上的 指示电流表和电压表等组成。
系统原理图如图 2 所示。
图 2 提升机主回路系统原理图图 2 提升机主回路系统原理图 主拖动电机选择:鼠笼式异步电动机尽管结构简单、价格便宜、维护方便,但很难满足提升机启动和 调速性能的要求,因此,矿井提升机交流拖动系统均选用绕线式异步电动机作为主拖动电动机,绕线 式异步电动机转子串电阻后能限制启动电流和提高启动转矩,并能在一定范围内进行调速。
地面变电 所送来的二路 6kv 电源,一路工作,一路备用,经 tgg-6 型高压开关柜的隔离开关 glk1、油开关 gyd、 高压换向器线路接触器 xlc 的主触头、正向(或反向)接触器 zc(或 fc)后到主电机的定子。
在高压开 关柜内还设有电压互感器 yh,失压服扣线圈 syq,电流互感器 lh 和过流脱扣线圈 glq,用于失压或过流 保护。
在 syq 线圈回路中还串联接有紧急停车开关 jtk1 和换向器室栏栅门闭锁开关 lsk。
3.2 制动回路设 计矿井提升机大多数采用绕线式异步电动机来拖动,且多数场合下采用有级切换转子回路电阻来实现 调速。
其制动系统多采用可控硅动力制动和可调闸制动系统。
前者为电气制动,后者为机械制动。
提 升机在减速段运行中,当速度在 0~5%范围内,电气制动起作用,可调闸不起作用;当超速在 5%~ 10%范围内,电气制动限幅,并维持最大制动功率,同时可调闸起作用,总制动力矩增大;当超速 10%时,过速继电器 gsj1 作用于安全回路,可调闸将提升机滚筒闸住。
晶闸管动力电源装置主要有两 部分组成,一部分为主回路,另一部分为触发回路。
本文设计中采用 kzg 型三相可控硅动力制动系统。
此系统为单闭环动力制动系统,系统方框图如图 3 所示,从图中可以看出速度偏差控制和脚踏控制是 “或”的关系,哪个信号大,就允许哪个信号通过,亦即相应的控制方式发挥作用。
因此,单闭环控制时 司机可以脚踏制动进行控制,而在脚踏控制时,如提升机超速,闭环系统又可起监视保护作用。
图 3 单闭环动制动系统方框图 3.3 速度给定回路速度给定方式就是按行程原则产生速度给定信号。
在矿井提升机电控系统中,通常是 采用凸轮板给定方法,即由凸轮板控制自整角机的输出电压。
由于自整角机没有可滑动的触点,因此 电压变化较平稳,工作较可靠,维护量较小。
原理图如图 4 所示。
图 4 速度给定电路 自整角机作为给定装置应用时是将激磁绕组通以单相 110 伏交流电,在三相同步绕组中任取两相的输 出作为给定电压的输出。
其输出电压为交流,如需要直流则应通过桥式整流输出。
3.4 动力制动回路晶 闸管整流器及其触发装置成套地装在电源柜中,动力制动电源装置输出电压的大小与触发装置输入的 控制信号电压的高低有关。
图 5 动力制动电压形成回路 控制信号电压由两个回路组成一个或门电路,如图 5 所示。
只要其中之一达到触发要求时,即可使晶 闸管触发起制动作用。
这两个回路,一个是由实际速度与给定速度形成的速度偏差值,自动控制 cf3 磁 放大器的输出和动力制动输出,另一条回路由司机控制自整角机 cd2 的输出以实现人工调节。
在人工控 制动力制动系统时,由司机控制脚踏板带动自整角机 cd2 发生控制电压。
调整时应使其与磁放大器 cf3 的输出相配合。
当脚跟刚刚踩下,脚尖尚未下踏时,相当于控制开关闭和,使 dzc 得电吸合,晶闸管动 力制动投入,但此时自整角机 cd2 输出很小,动力制动电流最小。
当司机脚尖踏下后,自整角机 cd2 输 出最大。
在脚踏动力制动与 cf3 输出回路中,分别由 z1 和 z2 两个二极管组成一个或门电路,此两种控 制信号成并联关系,互不影响。
3.5 行程检测与显示利用旋转编码器将提升机的运行位置转化为脉冲, plc 对此脉冲进行高速计数,通过相应的计算自动生成提升机位置的相关数据,传送到 plc 内部高速计 数器的存储单元。
为了提高计数器的脉冲精度,选用日本 omron 公司的 e6c-cwsc 型可逆旋转编码器, 其脉冲准确精度高,在低速时不会丢失脉冲。
为了便于提升机司机操作,提升机电控系统需设置可靠 的行程显示装置(又称深度指示器)用于显示提升容器在井筒中的位置。
本文设计根据编码器所测的 运行距离(0~570m),采用 3 个 led 七段显示器作为提升机位置的显示。
图 6 plc 数字显示电路 图 6 所示电路中,用具有锁存,译码,驱动功能的芯片 cd4513 驱动共阴极 led 七段显示器,三只 cd45 13 的数据输入端 a~d 共用可编程控制器的 4 个输出端,其中 a 为最低位,d 为最高位。
le 是锁存使能 输入端,在 le 信号的上升沿将数据输入端输入的 bcd 数锁存在片内的寄存器中,并将该数译码后显示 出来。
如果输入的不是十进制数,显示器熄灭。
le 为高电平时,显示的数不受数据输入信号的影响。
显然,n 个显示器占用的输出点数为:4+n。
3.6 辅助回路设计辅助回路是用于对辅助设备进行供电和控 制的。
辅助回路的电源电压为交流 380v,两回路供电。
辅助回路所带负荷有:晶闸管动力制动电源装 置、制动油泵电动机、润滑油泵电动机等。
4 提升机主电动机转子电阻计算电动机转子电阻的计算,对 提升设备的正常运转有着重要的作用。
进行启动电阻计算时,首先应确定预备级级数和加速级级数。
因为所选的级数直接影响到最大切换力矩的增大或减小及平均启动加速度的提高或降低,甚至由于过 载能力不够而需加大电动机容量,故应全面考虑,选出经济合理的级数。
一般情况下,预备级级数和 加速级级数的选择见附表所示。
三相平衡启动电阻的计算方法很多,但基本上可分为两种类型:一类是按给定加速度来计算启动电 阻,另一类是以充分利用电动机的过载能力为出发点来计算。
因第一类方法计算简便准确,故本文中 采用此方法计算。
5 plc 控制系统设计 5.1 主控 plc 控制电路设计根据提升机的运行方式和煤矿企业的固 有特点,国产矿井提升机电控制系统中应用 plc 也发展很快。
但从现场使用情况来看,目前,在国产煤 矿提升机控制系统中,plc 主要用于处理开关量,以替代老式提升机控制系统中众多的继电器、接触 器、复杂的连线以及信号显示系统,而涉及到提升机安全运行的制动系统中的模拟量和自动调节过 程,大多还是通过用半导体器件、运算放大器等可调闸和可控硅动力制动的普通电子模式来处理。
使 用过程中经常会出现零点漂移、电子元件损坏,并且存在维修及重新调试难、可靠性差等缺点,因而 使提升机电控系统的可靠性降低。
针对上述问题,深入研究用 plc 控制煤矿提升机控制系统是非常必要 的。
本文中主控单元可编程序控制器(plc)设计,由一个 cpu226 主机和两片 i/o 扩展模块 em223 和 em222 组成,设计含有 40 个输入点 40 个输出点,则具体 i/o 接线如图 7 所示。
图 7 主控 plc 电路及扩展 i/o 接 线 5.2 plc 控制软件设计图 8 主程序控制流程图 plc 控制软件主程序流程图如图 8 所示。
(1)初始化子程序用于对高速计数器 hsc0 和 hsc1 进行以下操 作:写控制字,定义工作模式,清零,写设定值,设置定时中断,连接中断,启动计数。
(2)制动油 泵、润滑油泵、动力制动电源、五通阀电磁铁、四通阀电磁铁和安全阀电磁铁等的控制属于交流提升 机安全运行所需辅助设备的控制。
(3)制动油过压信号、制动油过热信号和润滑油过压信号的显示控 制用于交流提升机工作状态的显示控制。
(4)调绳闭锁回路是在调绳过程中起安全保护作用。
双卷简 提升机换水平调绳时,调绳转换开关 1hk-3 断开,使调绳连锁环节串入安全回路。
正常运行时,lhk-3 接通,调绳连锁不起作用。
(5)提升信号回路用于对交流提升电动机启动或减速作好准备。
(6)位 置测量子程序用于测量提升机在矿井中的位置。
(7)行程显示子程序根据旋转编码器的脉冲个数来显 示当前的行程位置。
(8)减速信号回路和减速信号铃用于减速控制并且发出铃声提示信号。
(9)自动换向工作回路和手动正反转工作回路分别用于自动和手动方式下对交流提升电动机进行正反转控 制。
(10)安全回路用于防止和避免交流提升机发生意外事故。