05机械设计基础
- 格式:ppt
- 大小:3.54 MB
- 文档页数:19
机械设计基础第五版简介《机械设计基础第五版》是一本系统介绍机械设计基础知识的教材,适用于机械工程领域的学习和实践。
本书是作者基于多年教学经验和实践总结而成,结合了理论与实践的有机结合,旨在帮助读者掌握机械设计的基本原理和方法,培养工程实践能力。
内容概述本书共分为总共分为十二个章节,包括:1.机械设计基础概述2.工程材料3.机械零件的基本参数与尺寸4.轴:设计与选择5.联轴器与联接6.齿轮传动基础7.制动器与离合器8.曲柄摇杆机构的设计9.凸轮机构的设计10.弹簧与密封件的设计11.设计实例与计算方法12.机械设计软件与计算机辅助设计每个章节都详细介绍了相应的知识点和设计方法,通过理论的讲解、实例分析、计算方法和软件辅助设计等手段,帮助读者掌握机械设计的基本原理和实践技能。
特点系统性与全面性本书的特点之一是系统性和全面性。
作者将机械设计的基础知识进行了系统的整理和归纳,并全面地介绍了机械设计的各个方面。
无论是机械零件的尺寸参数、轴的设计与选择、齿轮传动、弹簧设计等,都有详细的讲解和实例,使读者能够全面了解机械设计的各个方面。
理论与实践相结合本书既注重理论的讲解,又注重实践的能力培养。
每个章节都通过实例分析和计算方法的讲解,帮助读者将理论应用到实际的机械设计中。
同时,还介绍了一些常用的机械设计软件和计算机辅助设计的方法,使读者能够更好地应用现代技术手段进行机械设计。
创新与应用本书还注重介绍一些创新的机械设计方法和应用。
例如,对于曲柄摇杆机构的设计,不仅介绍了传统的设计方法,还介绍了一些创新的设计思路和方法。
这样的内容使读者能够了解到机械设计领域的最新发展和应用。
适用对象《机械设计基础第五版》适用于机械工程及相关专业的高等院校学生,也适用于从事机械设计工作的工程技术人员。
对于初学者来说,本书既可以作为教材,也可以作为自学的参考书。
对于已经有一定机械设计基础的人员来说,本书可以作为进一步提升技能的参考书。
第一篇总论第一章机械设计基础概论第一节机器的组成教学内容:机器的组成教学重点:机器的组成、机器与机构的区别教学难点:对机器与机构的理解与区别教学目的:让学生掌握机器的组成教学要点:机器:凡能实现确定的机械运动,又能作有用的机械功或完成能量、物料与信息的转换和传递的装置。
机构:用来传递运动和力或改变运动形式的机械传动装置。
机械:机器与机构的总称。
构件:组成机器的各个相对运动的单元体。
问题:1、机器与机构的区别?2、构件与零件的区别?3、通用零件与专用零件的区别?机器中常用的机构:带传动机构、链传动机构、齿轮传动机构、连杆机构、轮机构、螺旋机构、间歇机构、组合机构。
按用途的不同机器可分为:动力机器机器:工作机器信息机器现代机器的组成:动力装置传动装置机器的组成:执行装置操纵、控制装置辅助装置第二节本课程的内容、性质和任务教学内容:1、基本要求2、注意事项教学目的:让学生了解本课程的内容、性质和任务教学要点:1、研究对象:是一般工况条件下的常用机构和通用机械零、部件。
2、目的:3、学生应达到的基本要求:(1)掌握通用零部件的选用和设计的基本方法,初步具有设计能力。
(2)具有解题、计算、绘图、执行国家标准和使用有关技术资料的能力。
(3)熟悉常用机构和通用机械零件的结构、工作原理、特点、应用。
(4)具有测绘、装拆、调整、检测一般机械装置的能力。
(5)具有使用、维护机械传动装置的能力、(6)具有分析和处理机械一般问题的能力。
(7)初步具有应用计算机的能力。
4、注意事项:(1)理论联系实际(2)综合考虑各方面的因素第三节机器应满足的要求和设计制造程序教学内容:1、机器应满足的要求2、机器设计制造的程序教学目的:让学生了解机器应满足的要求和设计制造的程序教学重点:机器应满足的要求教学要点:❆一、机器应满足的要求:1、使用要求2、经济性要求3、社会要求4、可靠性要求5、其它特殊性要求❆二、机器设计制造的一般程序:1、可行性研究阶段2、方案设计阶段3、技术设计阶段机器的动力学设计机器的运动学设计零件工作能力设计部件装配草图和总装配草图设计主要零件校核4、施工设计阶段5、样机试制阶段6、投产销售阶段第四节机械零件设计的基本知识教学内容:1、机械零件的工作能力和计算准则2、设计的一般步骤3、三化教学重点:机械零件设计的工作能力和计算准则教学难点:判定条件教学目的:让学生掌握工作能力和几个判定条件,了解设计的一般步骤和三化教学要点:❆一、机械零件的工作能力和计算准则失效:机械零件丧失规定的功能的现象工作能力:在不发生失效的条件下,在规定的期限内零件所能工作的限度。
第1 章平面机构的自由度和速度分析1. 1 重点内容提要1 .1 .1 教学基本要求( 1) 掌握运动副的概念及其分类。
( 2) 掌握绘制机构运动简图的方法。
( 3) 掌握平面机构的自由度计算公式。
( 4) 掌握速度瞬心的概念, 能正确计算机构的瞬心数。
( 5) 掌握三心定理并能确定平面机构各瞬心的位置。
( 6) 能用瞬心法对简单高、低副机构进行速度分析。
1 .1 .2 构件和运动副及其分类1. 构件构件是机器中独立的运动单元体, 是组成机构的基本要素之一。
零件是机器中加工制造的单元体, 一个构件可以是一个零件, 也可以是由若干个零件刚性联接在一起的一个独立运动的整体。
构件在图形表达上是用规定的最简单的线条或几何图形来表示的, 但从运动学的角度看, 构件又可视为任意大的平面刚体。
机构中的构件可分为三类:( 1) 固定构件( 机架)。
用来支承活动构件(运动构件) 的构件, 作为研究机构运动时的参考坐标系。
( 2) 原动件( 主动件)。
又称为输入构件, 是运动规律已知的活动构件, 即作用有驱动力的构件。
( 3) 从动件。
其余随主动件的运动而运动的活动构件。
( 4) 输出构件。
输出预期运动的从动件。
其他从动件则起传递运动的作用。
2. 运动副运动副是由两构件组成的相对可动的联接部分, 是组成机构的又一基本要素。
由运动副的定义可以看出运动副的基本特征如下:( 1) 具有一定的接触表面, 并把两构件参与接触的表面称为运动副元素。
( 2) 能产生一定的相对运动。
因此, 运动副可按下述情况分类:( 1) 根据两构件的接触情况分为高副和低副, 其中通过点或线接触的运动副称为高副, 以面接触的运动副称为低副。
( 2) 按构成运动副两构件之间所能产生相对运动的形式分为转动副(又称为铰链) 、移动副、螺旋副和球面副等。
( 3) 因为运动副起着限制两构件之间某些相对运动的作用, 所以运动副可根据其所引入约束的数目分为Ⅰ级副、Ⅱ级副、Ⅲ级副、Ⅳ级副和Ⅴ级副。

前言机械设计基础课程是高等工科学校近机类、非机类专业开设的一门技术基础课。
杨可桢、程光蕴主编的《机械设计基础》, 因其内容精炼、深度适中、重点突出、知识面宽而被众多高等学校作为主要教材在教学中采用。
本书是根据原国家教委颁布的“高等工业学校机械设计基础课程基本要求”, 汇集了编者多年来的教学经验, 在深刻理解机械设计基础课程内容的基础上编写而成的, 是杨可桢、程光蕴主编《机械设计基础》的配套辅导书, 章节顺序和内容体系与教材完全一致, 并涵盖了国内同类教材的重点内容。
本书特点:1 .明确每章的教学基本要求和重点教学内容。
重点介绍基本概念、基本理论、基本分析方法和设计方法。
2 . 建立明晰的知识结构框架。
3 . 考点及经典题型精解。
介绍考点的具体内容,并详尽剖析, 总结解题规律、解题思路、解题技巧。
4 . 详细的课后习题解答。
5 . 自测试题及答案符合考点精神, 便于学习总结和自我检验。
书后附有模拟试题五套。
参加本书编写工作的有: 西安电子科技大学李团结( 第1 , 14章)、西安石油大学秦彦斌(第3 章) 、西安石油大学陆品( 第13章)、西安建筑科技大学史丽晨(第2 , 5 , 7 , 8 , 12 章)、西安建筑科技大学郭瑞峰(第4 , 6 , 9 , 10 , 11 , 15 , 16 , 17 , 18 章及模拟试题)。
全书由郭瑞峰、史丽晨主编。
本书可作为近机类、非机类大学生学习《机械设计基础》课程的参考书, 也可供电大、职大、函大、夜大等相关专业的学生学习使用, 也可作为考研辅导书, 还可供有关教师及工程技术人员参考。
由于编者水平有限, 书中难免有谬误和不妥之处, 敬请读者批评指正。
编者2005 年8 月于西安2 机械设计基础导教·导学·导考目录第1 章平面机构的自由度和速度分析⋯⋯⋯⋯⋯⋯11 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 1 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯6 1 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯61 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯111 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯16第2 章平面连杆机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯262 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯272 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯322 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯42第3 章凸轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯573 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯583 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯673 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯79 第4 章齿轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯934 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯95 4 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1014 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯108第5 章轮系⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1145 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1155 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1185 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯131第6 章间歇运动机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1426 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯144第7 章机械运转速度波动的调节⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯146 7 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1467 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯153Ⅱ机械设计基础导教·导学·导考7 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯161第8 章回转件的平衡⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1688 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯168 8 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1728 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯183 第9 章机械零件设计概论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯187 9 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1879 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1949 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯195 9 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1969 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯206 第10 章联接⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯21710 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯218 10 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯22410 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯240 第11 章齿轮传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25411 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25511 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯258目录Ⅲ11 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯274第12 章蜗杆传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28112 .3 考点及常见题型精解⋯ .⋯ .⋯ .⋯ .⋯ .⋯ .⋯282 12 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28612 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯293第13 章带传动和链传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30613 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30713 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯31613 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯324第14 章轴⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33314 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33414 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33814 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯347第15 章滑动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35615 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35715 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯359Ⅳ机械设计基础导教·导学·导考15 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯361第16 章滚动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37216 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37316 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37916 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯386第17 章联轴器、离合器和制动器⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯390 17 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39017 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39217 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39317 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39617 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯400第18 章弹簧⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40818 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40918 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯41118 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯418附录模拟试题及参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录A 模拟试题⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录B 模拟试题参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯439参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯449目录Ⅴ第1 章平面机构的自由度和速度分析1. 1 重点内容提要1 .1 .1 教学基本要求( 1) 掌握运动副的概念及其分类。
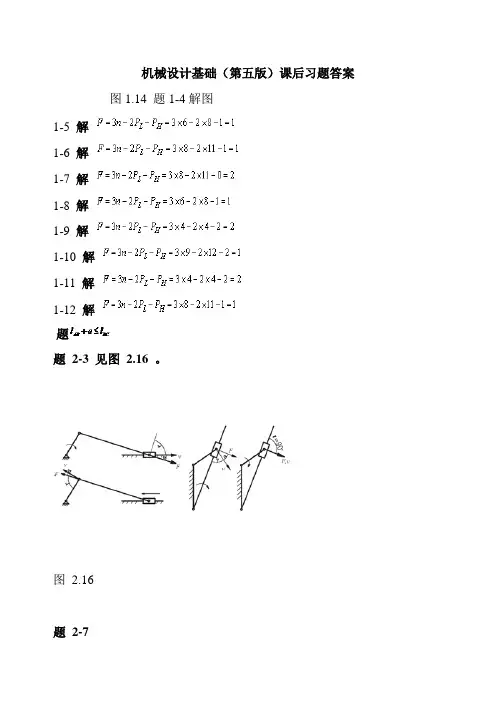
机械设计基础(第五版)课后习题答案图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解题题2-3 见图 2.16 。
图2.16题2-7图2.19解: 作图步骤如下(见图2.19 ):(1 )求,;并确定比例尺。
(2 )作,顶角,。
(3 )作的外接圆,则圆周上任一点都可能成为曲柄中心。
(4 )作一水平线,于相距,交圆周于点。
(5 )由图量得,。
解得:曲柄长度:连杆长度:题2-9解:见图 2.21 ,作图步骤如下:(1 )求,,由此可知该机构没有急回特性。
( 2 )选定比例尺,作,。
(即摇杆的两极限位置)(3 )做,与交于点。
(4 )在图上量取,和机架长度。
曲柄长度:连杆长度:4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-11解因螺旋角端面模数端面压力角当量齿数分度圆直径齿顶圆直径齿根圆直径4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。
(2)采用标准斜齿圆柱齿轮传动时,因螺旋角分度圆直径节圆与分度圆重合,5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。
图 5.5图5.6 5-2解:这是一个定轴轮系,依题意有:齿条 6 的线速度和齿轮 5 ′分度圆上的线速度相等;而齿轮 5 ′的转速和齿轮 5 的转速相等,因此有:通过箭头法判断得到齿轮 5 ′的转向顺时针,齿条 6 方向水平向右。
5-8解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵设齿轮1方向为正,则,∴∴与方向相同图 5.13图5.145-10解:这是一个混合轮系。


机械设计基础第五版答案第一章:机械设计基础概述本章主要介绍了机械设计的基本概念和基础知识。
包括机械设计的定义、设计的目标和原则、设计流程等内容。
第二章:材料力学基础本章介绍了材料力学的基本概念和理论知识。
包括应力、应变、弹性力学、塑性力学等内容。
2.1 应力与应变在机械设计中,应力和应变是非常重要的概念。
应力是材料内部发生变形时所受到的力的大小,通常用符号σ表示。
应变是材料在受到力作用时发生形变的程度,通常用符号ε表示。
2.2 弹性力学弹性力学是研究材料在受力作用下发生弹性变形的力学学科。
通过应力-应变关系可以描述材料的弹性行为。
弹性力学的基本理论包括胡克定律、杨氏模量、剪切模量等。
2.3 塑性力学塑性力学是研究材料在受力作用下发生塑性变形的力学学科。
塑性变形是指材料在超过一定应力下发生的不可逆的形变。
塑性力学的基本理论包括流动应力、屈服强度、塑性延展性等。
第三章:轴类零件的设计本章介绍了轴类零件的设计原理和方法。
包括轴的基本概念、轴的挑选和计算、轴的受力分析等内容。
3.1 轴的基本概念轴是一种常见的机械零件,用于传递动力和承受载荷。
根据轴的用途和形状,可以分为传动轴、支承轴、联接轴等。
3.2 轴的挑选和计算在轴的设计过程中,需要根据实际需求选择合适的材料和尺寸。
轴的挑选和计算包括强度计算、刚度计算、传动轴挑选等。
3.3 轴的受力分析轴的受力分析是轴类零件设计的重要环节。
根据轴所受到的不同力的作用方式,轴的受力分析可以分为弯曲受力、扭转受力、轴向受力等。
第四章:联接件的设计本章介绍了机械联接件(包括螺栓、销轴、键、轴承等)的设计方法和计算原则。
详细讲解了联接件的选择、受力分析和计算等内容。
4.1 螺栓的设计螺栓是一种常用的联接件,用于连接两个或多个零件。
螺栓的设计涉及到螺栓的选择、螺栓的强度计算、螺栓的防松设计等。
4.2 销轴的设计销轴是一种将两个零件固定在一起的联接件。
销轴的设计包括销轴的选择、销轴的强度计算、销轴的安装设计等。
机械设计基础第五版教学设计前言机械设计是机械工程的核心内容之一,是培养工科人才的重要环节。
机械设计基础是机械设计的基础课程,本文旨在介绍机械设计基础第五版教学设计。
教学目标本课程的教学目标是让学生掌握机械设计的基本知识,培养学生的设计能力,提高学生的创新能力和实践能力。
具体来说,教学目标有以下几点:1.理解机械设计的基础知识,包括力学、机械工程学等方面的基础知识;2.掌握机械设计的基本方法和过程;3.培养学生的设计能力,让学生能够独立完成机械设计任务;4.提高学生的创新能力和实践能力,让学生能够将理论知识应用于实践中。
教学内容和方法教学内容机械设计基础第五版教材共分为15个章节,主要内容如下:1.概述和基本概念;2.材料力学基础;3.齿轮与齿轮传动;4.轴和轴的连接;5.弹簧和螺旋弹簧;6.弯曲与挠度;7.柱和壳的稳定性;8.常数的加载和受力分析;9.冲压工艺和模具;10.铆接、焊接和粘接;11.机械元件寿命;12.安全工程;13.机械系统动力学;14.液压和气压传动;15.控制工程基础。
本课程将以教材的内容为基础,补充一些实践案例和项目设计,让学生能够更好地理解机械设计的知识点。
教学方法本课程采用讲授、讨论和实践相结合的教学方法:1.讲授:老师对教材内容进行详细讲解,让学生掌握基本知识点;2.讨论:鼓励学生与老师共同讨论,深入了解机械设计的方法和过程;3.实践:设计小组合作完成案例设计和课程项目,让学生通过实践巩固和应用所学的知识。
评估方式本课程的评估方式包括以下几种:1.期末考试:主要考察机械设计基础的理论知识和应用能力;2.课程项目:小组合作完成机械设计项目,评分主要考虑设计的创新性和实用性;3.作业和讨论:平时课堂讨论和作业完成情况考察;教学进度第1-5周第1-5周主要是对课程基础理论知识的讲授,包括基本概念、材料力学基础、齿轮和轴的连接等内容。
第6-12周第6-12周将通过小组合作完成案例设计,让学生掌握机械设计的方法和过程,培养学生的设计能力。
机械设计基础(第五版)课后习题答案(完整版)时间:2021.02.05 创作:欧阳科杨可竺、程光蕴、李仲生主编1-1至1-4解机构运动简图如下图所示。
图1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b 中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
(1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
(2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。