电机控制单芯片四路电机实时控制方案
- 格式:pdf
- 大小:378.21 KB
- 文档页数:3
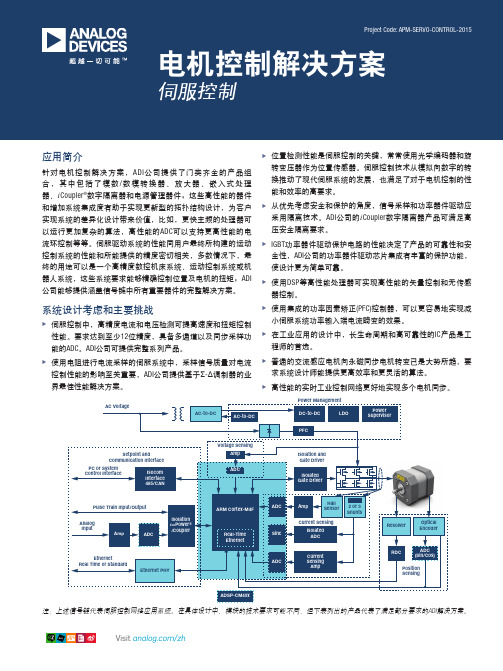
Visit/zh应用简介针对电机控制解决方案,ADI 公司提供了门类齐全的产品组合,其中包括了模数/数模转换器、放大器、嵌入式处理器、i Coupler ®数字隔离器和电源管理器件;这些高性能的器件和增加系统集成度有助于实现更新型的拓扑结构设计,为客户实现系统的差异化设计带来价值,比如,更快主频的处理器可以运行更加复杂的算法,高性能的ADC 可以支持更高性能的电流环控制等等。
伺服驱动系统的性能同用户最终所构建的运动控制系统的性能和所能提供的精度密切相关,多数情况下,最终的用途可以是一个高精度数控机床系统、运动控制系统或机器人系统,这些系统要求能够精确控制位置及电机的扭矩;ADI 公司能够提供涵盖信号链中所有重要器件的完整解决方案。
系统设计考虑和主要挑战X 伺服控制中,高精度电流和电压检测可提高速度和扭矩控制性能。
要求达到至少12位精度,具备多通道以及同步采样功能的ADC 。
ADI 公司可提供完整系列产品。
X 使用电阻进行电流采样的伺服系统中,采样信号质量对电流控制性能的影响至关重要,ADI 公司提供基于Σ-Δ调制器的业界最佳性能解决方案。
X 位置检测性能是伺服控制的关键,常常使用光学编码器和旋转变压器作为位置传感器。
伺服控制技术从模拟向数字的转换推动了现代伺服系统的发展,也满足了对于电机控制的性能和效率的高要求。
X 从优先考虑安全和保护的角度,信号采样和功率器件驱动应采用隔离技术。
ADI 公司的i Coupler 数字隔离器产品可满足高压安全隔离要求。
X IGBT 功率器件驱动保护电路的性能决定了产品的可靠性和安全性,ADI 公司的功率器件驱动芯片集成有丰富的保护功能,使设计更为简单可靠。
X 使用DSP 等高性能处理器可实现高性能的矢量控制和无传感器控制。
X 使用集成的功率因素矫正(PFC )控制器,可以更容易地实现减小伺服系统功率输入端电流畸变的效果。
X 在工业应用的设计中,长生命周期和高可靠性的IC 产品是工程师的首选。

51单片机控制智能小车(毕业论文)目录前言方案设计与论证控制器模块选取电机模块选取电机驱动器模块选取电源模块选取硬件设计主控系统电机模块电机驱动模块电源模块按键模块软件设计直行设计转弯设计调试中存在的问题参考文献一、前言:随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。
可见其研究意义很大。
本设计就是在这样的背景下提出的,指导教师已经有充分的准备。
本题目是结合科研项目而确定的设计类课题。
我们设计的智能电动小车该具有圆形运行、三角形运行、矩形运行和三者一起运行的功能。
都是运行一循环自动停车。
根据题目的要求,确定如下方案:在现有玩具电动车的基础上,加了四个按键,实现对电动车的运行轨迹的启动,并将按键的状态传送至单片机进行处理,然后由单片机根据所检测的各种按键状态实现对电动车的智能控制。
这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。
本设计采用STC89C52单片机。
以STC89C52为控制核心,利用按键的动作,控制电动小汽车的轨迹。
实现四种运行轨迹。
STC89C52是一款八位单片机,它的易用性和多功能性受到了广大使用者的好评。
二、方案设计与论证控制器模块选取我们采用STC公司的STC89S52单片机作为主控制器,STC公司的单片机内部资源比起ATMEL公司的单片机来要丰富的多,它在5V供电情况下,最多支持80M晶振、且内部有512B的RAM数据存储器、片内含8k空间的可反复擦些1000次的Flash只读存储器、1K的EEPROM、8个中断源、4个优先级、3个定时器、32个IO口、片机自带看门狗、双数据指针等。
但是不兼容Atmel。
从方便使用的角度考虑,我们选择了此方案电机模块选取采用普通直流电机。
直流电机运转平稳,精度有一定的保证。
直流电机控制的精确度虽然没有步进电机那样高,但完全可以满足本题目的要求。
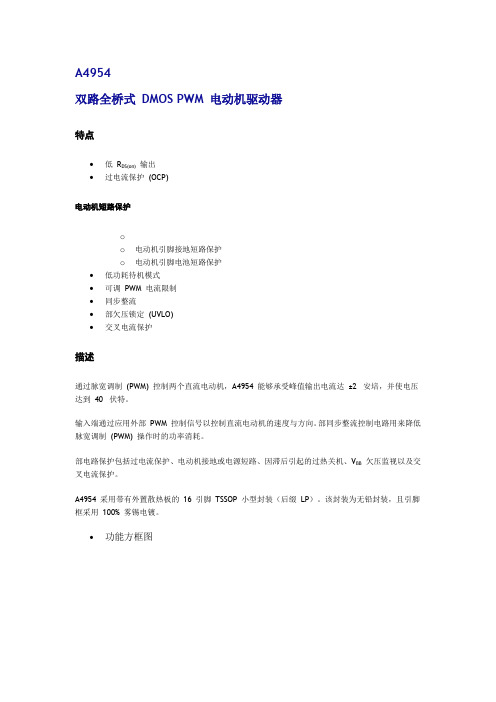
A4954双路全桥式DMOS PWM 电动机驱动器特点•低R DS(on)输出•过电流保护(OCP)电动机短路保护oo电动机引脚接地短路保护o电动机引脚电池短路保护•低功耗待机模式•可调PWM 电流限制•同步整流•部欠压锁定(UVLO)•交叉电流保护描述通过脉宽调制(PWM) 控制两个直流电动机,A4954 能够承受峰值输出电流达±2 安培,并使电压达到40 伏特。
输入端通过应用外部PWM 控制信号以控制直流电动机的速度与方向。
部同步整流控制电路用来降低脉宽调制(PWM) 操作时的功率消耗。
部电路保护包括过电流保护、电动机接地或电源短路、因滞后引起的过热关机、V BB欠压监视以及交叉电流保护。
A4954 采用带有外置散热板的16 引脚TSSOP 小型封装(后缀LP)。
该封装为无铅封装,且引脚框采用100% 雾锡电镀。
•功能方框图A4950全桥式DMOS PWM 电动机驱动器特点•低R DS(开)输出•过电流保护(OCP)o电动机短路保护o电动机引脚接地短路保护o电动机引脚电池短路保护•低功耗待机模式•可调PWM 电流限制•同步整流•部欠压锁定(UVLO)•交叉电流保护描述通过脉宽调制(PWM) 控制直流电动机,A4950 能够提供±3.5 安培的峰值输出电流,工作电压为40 伏特。
该产品可提供输入端子,通过外部施加的PWM 控制信号控制直流电动机的速度与方向。
采用部同步整流控制电路降低脉宽调制(PWM) 操作时的功率消耗。
部电路保护包括过电流保护、电动机引脚接地短路或电源短路、带时延的过热关机、V BB欠压监视以及交叉电流保护。
A4950 采用带有外露散热板的8 引脚SOICN 小型封装(后缀LJ)。
该封装为无铅封装,且引脚框采用100% 雾锡电镀。
•功能方框图A4938三相无刷直流电动机预驱动器功能及优点•驱动6 N-通道MOSFET•同步整流,减少功率耗散•部UVLO 和热关机电路•霍尔元件输入•PWM 电流限制•停机时间保护•FG 输出•待机模式•锁检测保护•过压保护描述A4938 是完整的三相无刷直流(BLDC) 电动机预驱动器,可为所有N 通道功率MOSFET 三相桥的直接大电流门极驱动提供输出。

前言单片机是一个单芯片形态、面向控制对象的嵌入式应用计算机系统。
它的出现及发展使计算机技术从通用型数值计算领域进入到智能化的控制领域。
从此,计算机技术在两个重要领域-—通用计算机领域和嵌入式计算机领域都得到了极其重要的发展,并正在深深地改变着我们的社会。
采用8031单片机控制步进电机,可实现步进电动机正反转控制和步进电动机的无级调速。
分析了步进电机的工作原理,讨论了系统硬件和软件的设计方法,并给出了步进电机的四相八拍单片机控制的具体实现方法。
该系统操作简单,降低了成本,提高了系统的可靠性。
步进电机具有控制方便和体积小等特点,因此在智能仪表和位置控制中得到了广泛的应用。
近年来大规模集成电路的发展以及各种单片机的迅速发展和普及,为设计功能强、价格低的步进电机控制驱动器提供了先进的技术和充足的资源.步进电动机是一种将电脉冲信号转换成相应角位移或线位移的电动机,它的运行需要专门的驱动电源,驱动电源的输出受外部的脉冲信号控制。
每一个脉冲信号可使步进电机旋转一个固定的角度,这个角度称为步距角。
脉冲的数量决定了旋转的总角度,脉冲的频率决定了电动机旋转的速度,改变绕组的通电顺序可以改变电机旋转的方向。
在数字控制系统中,它既可以用作驱动电动机,也可以用作伺服电动机.它在工业过程控制中得到广泛的应用,尤其在智能仪表和需要精确定位的场合应用更为广泛。
1 单片机的基本知识1。
1 概述单片微型计算机简称单片机,由于它的结构及功能均是按工业控制要求设计的,所以其确切的名称应是单片微控制器(Single Chip Microcontroller).它是把微型机算计的各个功能部件:中央处理器CPU、随机存储器RAM、只读存储器ROM、并行I/O接口、定时器/计数器及串行通信接口等集成在一块芯片上,构成一个完整的微型计算机系统,故又把它称为单片微型计算机系统(Single Chip Microcomputer).由于单片机面对的是测控对象,突出的是控制功能,所以它从功能和形态上来说都是应控制领域应用的要求而诞生的.随着单片机技术的发展,它在芯片内集成了许多面对测控对象的接口电路,如ADC、DAC、高速I/O口、PWM、WDT等。

xx大学毕业设计(论文)题目:单片机实现的步进电机控制系统设计作者:系(部):专业班级:指导教师:职称:20 年月日步进电机控制系统的组成如图4.1所示:图4.1 控制系统图3、本课题需要重点研究的、关键的问题及解决的思路[8]步进电机控制程序设计的主要问题有三个:第一、控制脉冲产生;第二、步进电机的旋转方向和时序脉冲的关系;第三、步数的确定。
作为单片机控制步进电机的程序的构成也是主要由这几个问题,因此可以从这三个问题入手:(1)控制脉冲的产生在单片机控制步进电机时,一般来讲,控制是用软件产生的。
方法是先输出一个高电平,然后延时,再输出低电平,再进行延时。
延时时间的长短由步进电机的工作频率决定。
(2)步进电机的旋转方向和时序脉冲的关系产生时序脉冲的方法是:1 单片机的IO 端口,分别控制三相步进电机的A, B, C 三相绕组;2 控制模式写出控制模型;2 制模型的顺序向步进电机输入控制脉冲。
(3)步数的确定步进电机运行的步数可由步距角和需要转过的角度来计算:NZ r b ⋅︒=360θ 式中:b θ-步距角;r Z -转子齿数; N -拍数(一般三拍时N =m 或六拍时N =2m );m -控制绕组相数,m =3毕业设计(论文)任务书学生姓名_1111指导教师_黄云龙、廖东进、朱秋琴职称副教授、助教、助教系别_信息与电子工程系_专业电气年级 03级___班级课题名称单片机实现的步进电机控制系统设计任务与要求:一、设计(论文)要求:本课题的主要任务是通过单片机控制系统,实现对步进电机工作状态的控制。
具体设计方案如下:本设计采用凌阳16 位单片机SPCE061A对步进电机进行控制,通过IO 口输出的具有时序的方波作为步进电机的控制信号,信号经过芯片L298N驱动步进电机;同时,用4X4的键盘来对电机的状态进行控制,并用数码管显示电机的转速,采用74LS164作为4位单个数码管的显示驱动,从单片机输入信号;利用凌阳单片机的语音功能播报电机的转速。
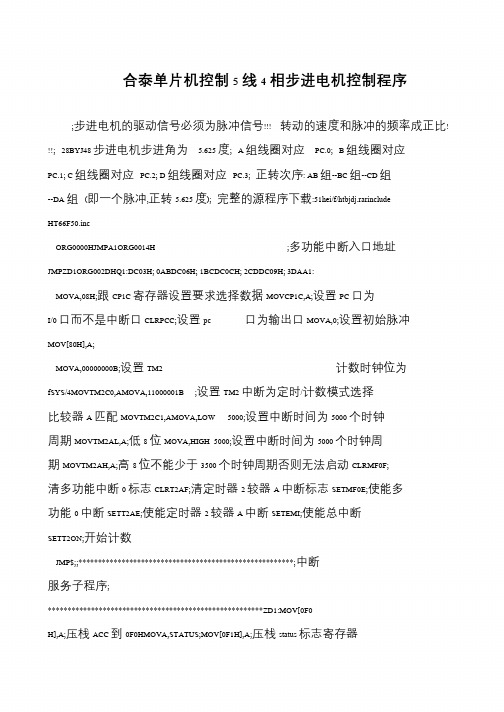
合泰单片机控制5线4相步进电机控制程序;步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 28BYJ48 步进电机步进角为 5.625 度; A 组线圈对应PC.0; B 组线圈对应PC.1; C 组线圈对应PC.2; D 组线圈对应PC.3; 正转次序: AB 组--BC 组--CD 组--DA 组(即一个脉冲,正转5.625 度); 完整的源程序下载:51hei/f/htbjdj.rarinclude HT66F50.incORG0000HJMPA1ORG0014H ;多功能中断入口地址JMPZD1ORG002DHQ1:DC03H; 0ABDC06H; 1BCDC0CH; 2CDDC09H; 3DAA1: MOVA,08H;跟CP1C 寄存器设置要求选择数据MOVCP1C,A;设置PC 口为I/0 口而不是中断口CLRPCC;设置pc 口为输出口MOVA,0;设置初始脉冲MOV[80H],A;MOVA,00000000B;设置TM2 计数时钟位为fSYS/4MOVTM2C0,AMOVA,11000001B ;设置TM2 中断为定时/计数模式选择比较器A 匹配MOVTM2C1,AMOVA,LOW 5000;设置中断时间为5000 个时钟周期MOVTM2AL,A;低8 位MOVA,HIGH 5000;设置中断时间为5000 个时钟周期MOVTM2AH,A;高8 位不能少于3500 个时钟周期否则无法启动CLRMF0F;清多功能中断0 标志CLRT2AF;清定时器2 较器A 中断标志SETMF0E;使能多功能0 中断SETT2AE;使能定时器2 较器A 中断SETEMI;使能总中断SETT2ON;开始计数JMP$;;*******************************************************;中断服务子程序;*******************************************************ZD1:MOV[0F0H],A;压栈ACC 到0F0HMOVA,STATUS;MOV[0F1H],A;压栈status 标志寄存器。
MCS-51单片机电机转速控制及测速显示系统简介MCS-51单片机是一种广泛应用于嵌入式系统的单芯片微型计算机。
本文将介绍基于MCS-51单片机的电机转速控制及测速显示系统。
该系统通过对电机信号进行处理,实现了对电机转速的控制和测速。
系统组成该系统由电机、电机驱动电路、MCS-51单片机、显示模块等组成。
电机驱动电路:使用了L298N电机驱动芯片,可以为电机提供双向直流电源。
该电子板还添加了变阻器控制,通过调节电子板上的两个旋钮来改变电机的转速和方向。
MCS-51单片机:采用AT89S52芯片,主控为MCS-51单片机,在控制电机的同时,还可以测量电机的转速。
通过单片机与电机驱动电路的控制,来控制电机的转速。
显示模块:采用了LCD2004液晶显示模块,可实现对转速和程序运行状态的显示。
系统原理当电机启动时,读取电机反馈的信号,并将该信号传递给MCS-51单片机进行处理。
根据控制算法,单片机输出PWM(脉冲宽度调制)信号给电机驱动模块,从而改变电机的转速和方向。
同时,单片机还可以测量电机旋转的速度,将其显示在LCD2004液晶显示器上。
当用户需要改变电机的转速时,可以通过旋转电子板上的旋钮来改变电机的转速和方向。
同时,LCD2004显示器可以显示电机的当前实际速度和设定速度,帮助用户更好的控制电机的运转。
系统功能该系统具有以下功能:1.控制电机的转速和方向;2.测量电机的转速;3.显示电机的当前实际速度和设定速度。
系统优势该系统采用MCS-51单片机,具有代码量小、容易维护、功耗低等优势,适合于嵌入式系统中的电机转速控制应用。
此外,显示模块也可以提供对系统状态的及时监控和反馈,便于故障排除。
本文介绍了基于MCS-51单片机的电机转速控制及测速显示系统。
该系统通过对电机信号进行处理,实现了对电机转速的控制和测速。
该系统具有代码量小、容易维护、功耗低等优势,适合于嵌入式系统中的电机转速控制应用。
同时,显示模块也可以提供对系统状态的及时监控和反馈,便于故障排除。
基于单片机STC89C52控制的智能小车摘要:该毕业设计是采用无线遥控基于单片机的功能实现的,当无线遥控器的某个按键按下时,无线发射器将按键信号以编码的形式在315MHz的频率上发射出去,无线接收器接收并放大发射信号同时解调出TTL电平信号送至单片机进行处理,单片机通过比较和识别接收来的无线遥控编码便可执行相应的遥控功能,从而实现智能小车的前进、后退、左转和右转的基本功能和伴随音乐演奏而闪烁的LED的开启与关闭的功能。
此外,我加入了温度传感器与时钟芯片,让它们在液晶显示器上显示其室温和时间,并用按钮进行时间的调控。
由于无线遥控模块是四路单向锁存模块,只能单线实现四个功能,所以发射模块的控制按键不够,根据需要,我仅仅用无线模块控制小车的前进和后退,停止,其它的采用按键调试,用按键来实现小车的前进/后退/左转/右转/音乐/时间调控等功能。
关键词:无线模块;液晶显示模块;电机驱动模块;音乐;智能小车目录引言................................................................3 1 整体方案设计....................................................4 1.1 整体方案设计的思路..............................................41.2 整体方案的流程图................................................42 避障遥控小车系统概况............................................4 2.1 SC2272无线遥控模块原理..........................................4 2.2 驱动原理的简介..................................................62.3 直流电机简介....................................................93 模块方案比较与论证.............................................12 3.1 车体设计.......................................................12 3.2 电机模块的选择.................................................12 3.3 电机驱动模块的选择.............................................123.4 控制器模块的选择...............................................134 系统硬件电路设计...............................................14 4.1 无线模块的设计.................................................144.2 直流电机的驱动模块.............................................155 软件的简单介绍.................................................16 5.1 KEIL的简介....................................................165.2 PROTUES的简介.................................................165.3 STC_ISP_V480的简介.............................................17 参考文献..........................................................18 附录一:实物图....................................................19 附录三:总程序.....................................................22引言随科学技术的进步,智能化和自动化技术越来越普及,也广泛应用于机器人玩具制造领域,使智能机器人越来越多样化。
单相无刷电机是一种广泛应用于家用电器、工业设备和自动化系统中的电动机。
而单片机作为一种集成了处理器、存储器和输入/输出端口的微控制器,可以用来实现对单相无刷电机的精准控制。
本文将深入探讨基于单片机的单相无刷电机控制系统设计,包括系统架构、控制算法、硬件电路和软件设计等方面。
一、系统架构在设计基于单片机的单相无刷电机控制系统时,首先要确定系统的整体架构。
一般来说,该系统包括单片机模块、功率驱动模块、传感器模块和通信接口模块。
单片机模块用于控制电机的速度和位置,功率驱动模块负责驱动电机,传感器模块用于检测电机的速度和位置,通信接口模块实现系统与外部控制设备的通讯。
二、控制算法针对单相无刷电机的控制需求,常用的控制算法包括电压控制、霍尔传感器反馈控制和编码器反馈控制。
电压控制是最基本的控制方式,通过调节电机的电压来控制其转速。
霍尔传感器反馈控制利用霍尔传感器来检测电机的转子位置,从而实现对电机的闭环控制。
编码器反馈控制则通过编码器来实时反馈电机的转子位置和速度,从而实现更加精准的控制。
三、硬件电路在实现基于单片机的单相无刷电机控制系统时,需要设计相应的硬件电路。
其中,功率驱动模块主要包括功率放大器和电机驱动器,用于输出电机所需的功率信号。
传感器模块则需要接入霍尔传感器或编码器,并进行信号调理和滤波处理。
还需要考虑系统的供电和接地,以及可能的过流和过压保护电路。
四、软件设计除了硬件电路外,基于单片机的单相无刷电机控制系统还需要相应的软件设计。
首先是编写控制算法的相关代码,包括电压控制算法、霍尔传感器反馈控制算法和编码器反馈控制算法。
还需要编写驱动程序,实现单片机对功率驱动模块和传感器模块的控制。
另外,为了方便系统的调试和监控,还可以设计相应的用户界面和通讯协议。
基于单片机实现对单相无刷电机的控制系统设计涉及到系统架构、控制算法、硬件电路和软件设计等多个方面。
通过合理的设计和实现,可以实现对单相无刷电机的精准控制,从而满足不同应用场景的需求。
电动车控制器设计方案一、电动车控制器的组成部分电动车控制器是电动车整车中的核心部分,其技术性能的优劣直接影响电动车的正常使用。
目前电动车用有刷无刷控制器普遍采用PWM方式,控制器内部必须具有PWM发生器电路,另外还有电源电路、功率器件、功率器件驱动电路、控制部件(转把、制动把、电动机霍尔元件等)信号的采集与处理电路、过电流与欠电压等保护电路。
二、电动车控制器的结构原理普通有刷控制器内部结构框图如下图所示。
电源电路为控制器内部电子元器件提供工作电压;PWM芯片根据转把的输入电压输出相应脉冲宽度的方波给MOS管驱动电路;MOS管驱动电路将PWM信号整形提供给MOS管;MOS管为大功率开关管,其导通时间与关闭时间,受导通信号与PWM信号和成的混合信号控制;欠电压保护电路是当蓄电池电压降低到控制器设定值以下时,PWM芯片停止了PWM 信号输出,以保护蓄电池不至于在低电压情况下放电;限电流保护(或过电流保护)电路是对控制器输出的最大电流进行限制,以保护蓄电池、控制器、电动机等不会出现允许范围以上的大电流。
三、电动机控制器的接线1、无刷电动机控制器接线无刷电动机控制器接线有多有少,一般有以下几条(线的颜色根据常用类型总结,不能代表所有线的颜色都一样):电源线两条(红色线、黑色线)、转把线三条(红色线、蓝色线、黑色线)、制动断电线两条(黄色线、黑色线)、电子制动线两条(灰色线、黑色线)、电动机线两条(绿色线、蓝色线)、霍尔输入线四条(蓝色线、绿色线、红色线、黑色线)、倒车线一条(黄色线)、助力信号线三条(红色线、绿色线、黑色线)。
2、有刷电动机控制接线有刷电动机控制接线一般有以下几条:电源线两条、转把线三条、电动机线两条、制动断电线两条、限速线两条等。
四、控制器接线示意图在电动车控制器中广泛应用,方波驱动最大的缺点在于换相时的电流突变引起的转矩脉动,导致噪声较大,但好的控制策略可以大大改善换相噪声。
电动车控制器设计的难点在于电流控制,本文就电动车控制器设计的一些关键地方加以描述。
电机控制—单芯片四路电机实时控制方案
型号: SD-F28377D-EVM
概述:
•两个200MHz C28x DSP + 两个200MHz CLA,浮点运算单元
•四组电机接口同时控制四个三相电机,完美展现出F2837xD强大的电机控制外设资源,适合用于数控机床、多轴控制、高端伺服系统等产品
特点:
•CPU:TMS320F28377DPTPT
•电机接口:4组
•RS232:2个;RS485:1个
•CAN:1个
•USB:1个
•SD Card:1个
•扩展接口:1个,GPIO×14、3.3V、GND
•EEPROM:1个
•User LED:2个;User KEY:4个
Featured Products
TMS320F28377DPTPT (TMS320F28377D)
Delfino TMS320F2837xD 器件是一款具有集成型模拟特性和通信接口的双核微控制器。
此双路实时控制子系统基于 TI 行业领先的32 位 TMS320C28x 浮点 CPU,并且特有两个 CLA,为那些对运行并行控制算法以及其他更多算法的应用感兴趣的设计人员提供额外的灵活性。
设计人员能够实现高达 800MIPS 的总体系统性能。
TPS62420DRCR (TPS62420)
The TPS6242x device is a synchronous dual step-down DC–DC converter. It provides two independent output voltage rails powered by 1-cell Li-Ion or 3-cell NiMH/NiCD batteries. The device is also suitable to operate from a standard 3.3-V or 5-V voltage rail.
TPS3895ADRYR (TPS3895)
The TPS3895, TPS3896, TPS3897, and TPS3898 devices (TPS389x) are a family of very small supervisory circuits that monitor voltages greater than 500 mV with a 0.25% (typical) threshold accuracy and offer adjustable delay time using external capacitors. The TPS389x family also has a logic enable pin (ENABLE or ENABLE) to power on and off the output. With the TPS3895, for example, when the input voltage pin (SENSE) rises above the threshold, and the ENABLE pin is high, then the output pin (SENSE_OUT) goes high after the capacitor-adjustable delay time. When SENSE falls below the threshold or ENABLE is low, then SENSE_OUT goes low.
TPS3897ADRYR (TPS3897)
The TPS3895, TPS3896, TPS3897, and TPS3898 devices (TPS389x) are a family of very small supervisory circuits that monitor voltages greater than 500 mV with a 0.25% (typical) threshold accuracy and offer adjustable delay time using external capacitors. The TPS389x family also has a logic enable pin (ENABLE or ENABLE) to power on and off the output. With the TPS3895, for example, when the input voltage pin (SENSE) rises above the threshold, and the ENABLE pin is high, then the output pin (SENSE_OUT) goes high after the capacitor-adjustable delay time. When SENSE falls below the threshold or ENABLE is low, then SENSE_OUT goes low.
TPS2051BDBVR (TPS2051B)
The TPS204xB/TPS205xB power-distribution switches are intended for applications where heavy capacitive loads and short circuits are likely to be encountered. These devices incorporates 70-mΩN-channel MOSFET power switches for power-distribution systems that require multiple power switches in a single package. Each switch is controlled by a logic enable input. Gate drive is provided by an internal charge pump designed to control the power-switch rise times and fall times to minimize current surges during switching. The charge pump requires no external components and allows operation from supplies as low as 2.7 V.
SN74HC14DR (SN74HC14)
These Schmitt-trigger devices contain six independent inverters. They perform the Boolean function Y = A in positive logic.
新晔集团成立于1988年,是领先的电子元器件行业授权经销商。
新晔集团拥有58间办事处与10个物流中心,共计员工1,000多名,逾来自不同行业的6,000名客户,如消费类电子产品、家用电器、工业、电信业、电子制造服务、汽车和医疗业等。
德州仪器(TI)是世界上最大的半导体公司之一。
我们始终致力于提供创新半导体技术,帮助我们的客户开发世界最先进的电子产品。
我们的模拟、嵌入式处理以及无线技术不断深入至生活的方方面面,从数字通信娱乐到医疗服务、汽车系统以及各种广泛的应用,无所不在。
在 TI 发展之初,公司的目标是利用公司独有的技术能力从根本上颠覆传统市场,创造全新的市场。
我们的发展历程中始终贯穿一条清晰的主线,就是运用越来越先进的实时信号处理技术,实现从量变到质变的进步,真真切切地不断改变世界。