机械原理-其他常用机构棘轮机构
- 格式:ppt
- 大小:1.93 MB
- 文档页数:10
棘轮机构的工作原理简述
棘轮机构是一种通过多个齿轮间接传递动力的机械装置。
它由多个相互嵌入的棘轮和一个齿轮组成。
其中,棘轮是一种具有齿状凸起的圆盘,齿轮则是一个具有刻有齿的圆盘。
棘轮机构的工作原理如下:
1. 刻有齿的齿轮通过一个驱动力(例如电机)提供动力。
2. 当齿轮转动时,齿轮上的齿将碰触并推动第一个棘轮开始转动。
3. 转动的第一个棘轮通过凸起的齿形将力传递给第二个棘轮。
4. 第二个棘轮由第一个棘轮推动后开始转动。
5. 类似地,第二个棘轮也会通过凸起的齿形将力传递给第三个棘轮。
6. 这种传递力的过程可以根据需要循环进行多次,使得每个棘轮都能够得到传递的力。
7. 最后一个棘轮通常是输出轮,它通过棘轮机构传递的力来驱动其他机械装置,从而完成特定功能。
通过这种齿轮和棘轮的组合,棘轮机构能够传递和转换动力,实现不同速度和扭矩的输出。
它常被应用在需要传递大扭矩或需要实现精确重复运动的机械装置中,如机床、自动化生产线和各类机械传动系统中。
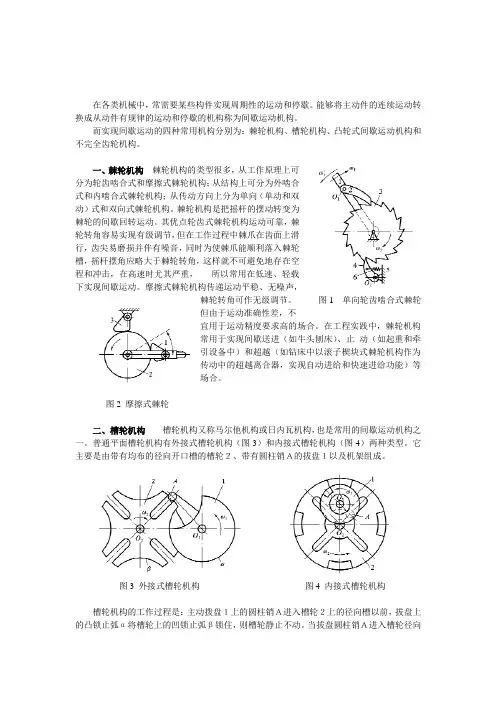
在各类机械中,常需要某些构件实现周期性的运动和停歇。
能够将主动件的连续运动转换成从动件有规律的运动和停歇的机构称为间歇运动机构。
而实现间歇运动的四种常用机构分别为:棘轮机构、槽轮机构、凸轮式间歇运动机构和不完全齿轮机构。
一、棘轮机构棘轮机构的类型很多,从工作原理上可分为轮齿啮合式和摩擦式棘轮机构;从结构上可分为外啮合式和内啮合式棘轮机构;从传动方向上分为单向(单动和双动)式和双向式棘轮机构。
棘轮机构是把摇杆的摆动转变为棘轮的间歇回转运动。
其优点轮齿式棘轮机构运动可靠,棘轮转角容易实现有级调节,但在工作过程中棘爪在齿面上滑行,齿尖易磨损并伴有噪音,同时为使棘爪能顺利落入棘轮槽,摇杆摆角应略大于棘轮转角,这样就不可避免地存在空程和冲击,在高速时尤其严重,所以常用在低速、轻载下实现间歇运动。
摩擦式棘轮机构传递运动平稳、无噪声,棘轮转角可作无级调节。
图1 单向轮齿啮合式棘轮但由于运动准确性差,不宜用于运动精度要求高的场合。
在工程实践中,棘轮机构常用于实现间歇送进(如牛头刨床)、止动(如起重和牵引设备中)和超越(如钻床中以滚子楔块式棘轮机构作为传动中的超越离合器,实现自动进给和快速进给功能)等场合。
图2 摩擦式棘轮二、槽轮机构槽轮机构又称马尔他机构或日内瓦机构,也是常用的间歇运动机构之一。
普通平面槽轮机构有外接式槽轮机构(图3)和内接式槽轮机构(图4)两种类型。
它主要是由带有均布的径向开口槽的槽轮2、带有圆柱销A的拔盘1以及机架组成。
图3 外接式槽轮机构图4 内接式槽轮机构槽轮机构的工作过程是:主动拨盘1上的圆柱销A进入槽轮2上的径向槽以前,拔盘上的凸锁止弧α将槽轮上的凹锁止弧β锁住,则槽轮静止不动。
当拔盘圆柱销A进入槽轮径向槽时,凸、凹锁止弧刚好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
外接式槽轮机构的主动拨盘1与槽轮2转向相反;内接式槽轮机构的主动拨盘1与槽轮2转向相同,且传动平稳、占空间小,槽轮停歇时间较短。
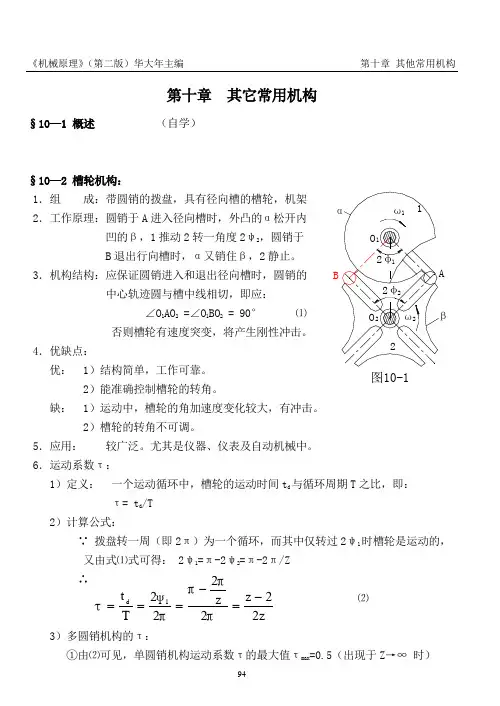
94第十章 其它常用机构§10—1 概述 (自学)§10—2 槽轮机构:1.组2.工作原理:圆销于A 凹的β,1推动2 B 退出行向槽时,α 3 ∠O 1AO 2 =∠O 1BO 2 4.优缺点:优: 1)结构简单,工作可靠。
2)能准确控制槽轮的转角。
缺: 1 2)槽轮的转角不可调。
5.应用: 6.运动系数τ:1)定义: τ= t d /T 2)计算公式:∵ 拨盘转一周(即2π)为一个循环,而其中仅转过2ψ1时槽轮是运动的, 又由式⑴式可得: 2ψ1=π-2ψ2=π-2π/Z ∴⑵3)多圆销机构的τ:①由⑵可见,单圆销机构运动系数τ的最大值τmax=0.5(出现于Z →∞ 时)z 22z π2z π2ππ2ψ2T t τ1d -=-===②要增大运动系数τ,可在拨盘上装上k个圆销,此时:τ= k(z-2)/2z ⑶4)k与z的关系:∵槽轮机构是间歇运动机构∴应: 0<τ< 1由τ> 0得: z≥3由τ< 1得: k < 2z/(z-2)于是: z 3 4、5 ≥6k 1~5 1~3 1~23)棘轮运动具有超越性(棘轮转得比主动件快时,其运动不受限制的特性)。
缺:冲击、噪音大、运动平稳性差、齿尖易磨损。
5.应用:较广泛(主要用于低速,低要求处)二.棘爪啮入条件:棘爪2与棘轮3在齿顶A接触时,3对2的作用力有正压力N32和摩擦力F32。
95961.啮入条件: 为使2能顺利滑入3的齿槽,N 32与F 32=fN 32的径向分力应: N 32sin α> F 32cos α= fN 32cos α 即: tg α> f = tg ψ也即: α>ψ (ψ一 摩擦角) ⑴ 2.棘爪轴心O 2的位置:O 2的位置应使爪与轮在齿顶A 接触时,O 2A ⊥O 1A ,因为这样棘爪的受力最小。
3.α的大小: 通常取α= 20°(∵ f = 0.2时 ψ= tg -1f = 11°30′ ∴ α= 20°总能满足①)§10—4 不完全齿轮机构 (自学)§10—5 凸轮式间歇运动机构§10—6 万向联轴器 一.单万向联轴器:1.组成:主、从动叉轴1、3,十字头2,机架 2.传动特点:1)轴1、3可成一锐角α,且传动中α2)轴1转一周,轴3 (ω3/ω1)是变化的。