合肥工业大学机械原理内部辅导
- 格式:ppt
- 大小:6.19 MB
- 文档页数:15
平面运动链自由度计算公式为HL 23p p n F --=运动链成为机构的条件运动链成为机构的条件是:取运动链中一个构件相对固定作为机架,运动链相对于机架的自由度必须大于零,且原动件的数目等于运动链的自由度数。
满足以上条件的运动链即为机构,机构的自由度可用运动链自由度公式计算。
一、平面机构的结构分析计算错误的原因例题圆盘锯机构自由度计算解n =7,p L =6,p H =0F =3n -2p L -p H =3⨯7-2⨯6=9错误的结果!12345678ABCD E F两个转动副12345678ABCD EF●复合铰链(Compound hinges )定义:两个以上的构件在同一处以转动副联接所构成的运动副。
k 个构件组成的复合铰链,有(k -1)个转动副。
正确计算B 、C 、D 、E 处为复合铰链,转动副数均为2。
n =7,p L =10,p H =0F =3n -2p L -p H =3⨯7-2⨯10=1准确识别复合铰链举例关键:分辨清楚哪几个构件在同一处用转动副联接12 31342413231 2两个转动副两个转动副两个转动副两个转动副1234两个转动副1423两个转动副例题计算凸轮机构自由度F=3n-2p L-p H=3⨯3-2⨯3-1=2?●局部自由度(Passive degree of freedom)定义:机构中某些构件所具有的仅与其自身的局部运动有关的自由度。
考虑局部自由度时的机构自由度计算设想将滚子与从动件焊成一体F=3⨯2-2⨯2-1=1计算时减去局部自由度FPF=3⨯3-2⨯3-1-1(局部自由度)=1●虚约束(Redundant constraint,Passive constraint)定义:机构中不起独立限制作用的重复约束。
计算具有虚约束的机构的自由度时,应先将机构中引入虚约束的构件和运动副除去。
虚约束发生的场合⑴两构件间构成多个运动副两构件构成多个导路平行的移动副两构件构成多个轴线重合的转动副两构件构成多个接触点处法线重合的高副⑵两构件上某两点间的距离在运动过程中始终保持不变未去掉虚约束时F =3n -2p L -p H =3⨯4-2⨯6=0 构件5和其两端的转动副E 、F 提供的自由度F =3⨯1-2⨯2=-1即引入了一个约束,但这个约束对机构的运动不起实际约束作用,为虚约束。
合肥工业大学大学机械制造专业考研内部信息解析合肥工业大学大学机械制造专业,初试考试科目是《机械原理》,每年命题老师均有不同程度的更替,但是命题的主要方向变化不是很大,有比较系统的规律可循,建议同学在初试专业课复习的时候,一定要了解目标学校的命题动态,复习的时候做到有的放矢。
同学在初试专业课复习的时候,如下资料切勿大意,机械原理释疑与习题详解(配套),机械原理知识要点与习题解析(配套),这些是除了教材之外很好的练习册。
该专业每年招生人数大概是45人,分数线一般维持在300分,如果你想获取奖学金的话,必须要达到330分。
对于想跨校一次性考研成功或者获取奖学金的同学而言,建议同学专业课最好能按照五个阶段,紧扣考试的重点难点和必考点,稳扎稳打,具体相关信息会在万学海文的导学班和大纲解析班告知各位同学,具体可以关注万学网站。
该学校,复试要求程度相对来说比较严格,复试大概能考4本书,机械设计(濮良贵)、数控技术、机械加工工艺基础(吴恒文)、机械工程控制基础(杨叔子)复试复习建议:复试时间应提早安排,主要内容:一、 1. 机械设计:齿轮、蜗轮蜗杆、带传动、链传动、轴、轴承;2. 加工工艺:内容很零散,50分的试卷基本把所有章节(除了数控那章)都覆盖到了;3. 控制工程:就是考察到第六章第二节,特别是三四五章是考试重点。
二、有关面试的英语口语内容:英语口语会考察一个常规题目(例如大学你最喜欢的运动及原因),还会考察专业英语朗读(200词)与直接翻译,另外当然别忘了英文自我介绍。
三、关于英语听力考察:40分的听力就是统一在教室听4-6级难度。
四、至于面试专业课方面的内容:就是平时有关机械的课程不一定从哪个方面拿出来问你,都是很重要的内容,也很浅显,简单说就是最基础的知识。
复试刷人是一定的,刷人的主要原因还是专业基础不扎实,建议同学在平时复习的时候,可以多关注一下复习相关的内容,同时在复试之前,必须要清楚地掌握复试的流程、复试的内容,以及需要注意的事项。
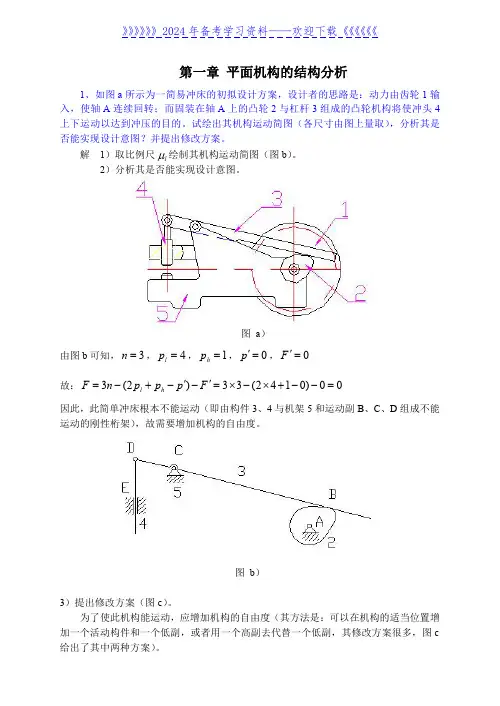
第一章平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图a )由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l 因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图c1)图c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F 3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F 4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p 13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l 0='F 0='F F p p p n F h l '-'-+-=)2(3F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯=10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链)(其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。

机械的运转及其速度波动的调节1、如图所示为一机床工作台的传动系统,设已知各齿轮的齿数,齿轮3的分度圆半径r 3,各齿轮的转动惯量J 1、J2、J 2,、J 3, 因为齿轮1直接装在电动机轴上,故J 1中包含了电动机转子的转动惯量,工作台和被加工零件的重量之和为G 。
当取齿轮1为等效构件时,试求该机械系统的等效转动惯量Je 。
解根据等效转动惯量的等效原则,有 22221211212)(212121v gG w J J w J w J e +++=' 则212133212221)()())((w v g G w w J w w J J J J e ++++=' 2322123232213221221)()())((Z Z Z Z r g G Z Z Z Z J Z Z J J J J e '''++++= 2、已知某机械稳定运转时其主轴的角速度ω1=100rad/s,机械的等效转动惯量 Je=0.5kgm 2 ,制动器的最大制动力矩 M r =20Nm (制动器与机械主轴直接相联,并取主轴为等效构件)。
设要求制动时间不超过3s ,试检验该制动器是否能满足工作要求。
解 因此机械系统的等效转动惯量Je 及等效力矩Me 均为常数,故可利用力矩形式的机械运动方程式dtdw J M e e = 其中:Nm M M r e 20-=-=,25.0kgm J e =dw dw M J dt re 025.0-=-=,将其作定积分得 )(5.2025.0)(025.0s w w w t s s ==--=,得s s t 35.2<=故该制动器 满足 工作要求3、在图示的行星轮系中,已知各轮的齿数z 1=z 2,=20,z 2=z 3=40,各构件的质心均在其相对回转轴线上,且J 1=0.01kg ㎡,J 2=0.04㎏㎡,J 2,=0.01㎏㎡,J H =0.18kg ㎡; 行星轮的质量m 2=2kg,m 2,=4kg,模数均为m=10mm 。
合工大机械原理答案1.两构件组成运动副的必要条件是两构件()。
[单选题] *A.直接接触且具有相对运动(正确答案)B.直接接触但无相对运动C.虽然不接触但具有相对运动D.既不接触也无相对运动2.平面四杆机构中,若存在急回运动特性,则其行程速比系数()。
[单选题] *A.k>1(正确答案)B.K=1C.k<1D.k=03.一对渐开线标准直齿圆柱齿轮啮合传动中,其啮合角的大小是()。
[单选题] *A.由大到小逐渐变化B.由小到大逐渐变化C.由小到大再到小逐渐变化D.始终保持不变(正确答案)4.要将连续的单向转动变换成具有停歇功能的单向转动,可采用的机构是()。
[单选题] *A.曲柄摇杆机构B.摆动从动件盘形凸轮机构C.棘轮机构D.槽轮机构(正确答案)5.机构具有确定运动的条件是机构的自由度()。
[单选题] *A.大于主动件数B.等于主动件数(正确答案)C.小于主动件数D.与主动件数无关6.凸轮机构常用的推杆的运动规律有a等速运动;b等加速等减速运动;c余弦加速度运动;d正弦加速度运动。
其中适用于高速运动的有()。
[单选题] *A.aB.a与bC.a,b与cD.d(正确答案)7.若忽略摩擦,一对渐开线齿廓啮合时,齿廓间作用力沿着()方向。
[单选题] *A.齿廓公切线B.节圆公切线C.中心线D.基圆内公切线(正确答案)8.具有相同理论廓线,只有滚子半径不同的两个对心直动滚子从动件盘形凸轮机构,其从动件的运动规律(),凸轮的实际廓线不同。
[单选题] *A.相同(正确答案)B.不同C.不一定9.刚性转子动平衡的力学条件是()。
[单选题] *A.惯性力系的主矢为零B.惯性力系的主矩为零C.惯性力系的主矢、主矩均为零(正确答案)10.机械在周期变速稳定运转阶段,一个循环内的驱动功Wd()阻抗功Wr。
[单选题] *A.大于B.等于(正确答案)C.小于D.不一定11.从机械效率的观点看,机构发生自锁是由于()。
2017合肥工业大学815《机械原理》初试真题回忆和复习建议复试结束有一段时间了,毕设也差不多了,闲着没事,给学弟学妹讲一下工大初试《机械原理》的情况,17年题目感觉不难,遇到几道原题,有课后习题,西工大版上的,还有之前考过的。
自我感觉比16年的简单。
第一题自由度计算送分,很简单。
第二题图解法或解析法求速度加速度,比较新颖,需要作辅助线,两个方法都行,我是用图解法做的。
解析法思路简单,但是计算时复杂,而且不好检查正误。
第三题连杆机构分析,曲柄连杆,给出角度,让你画出完整的曲柄机构,和尺寸。
第四题凸轮机构,比较简单。
第五题齿轮,变位齿轮,直齿斜齿计算,就那几个公式,问题不大。
第六题轮系,今年考的是历年真题之前考过的,去年也是东南版课后习题里的。
第七题平衡分析,曲柄滑块机构的受力,相对课后习题是比较简单的,也是图解法做的,计算也不难。
第八题应该是飞轮计算,根据驱动力矩等于阻力矩。
第九题计算转到惯量,这种题目一般就是直接套公式,不难。
难度不会超过16年的那个刨床机构。
第十题一般是开放性的题目,今年是考的机械手自由度吧,自行设计机器人手臂的传动,言之有理即可。
从17的试题可以看出:1、都是常规考点和题型,只要把十个题型熟练掌握,还是不难的。
2、除了最后一题,都是原题主要是课后习题的(东南版和西工大版都有,越来越侧重西工大的,东南的都基本出完了,17年出了几道西工大的);教辅书的,例如《机械原理学习与考研辅导》,所以说要多做题,很有可能就碰到原题,机械原理不像数学,并没多少题型,多练习考场就会遇到熟悉的题目;还有历年真题,好好研究,考过的题还有可能会考。
再谈一下复习大概计划:1、可以从暑假开始准备,课本要好好看一遍,有些公式需要记住,例题要重点看,有的课后习题需要做一遍。
工大现在不考简答题,概念之类的理解就行。
看课本时可以结合视频课程来看,比自己啃要效率高,例如考试点的机械原理辅导视频就可以,其他名校的视频课程也行。
2017版合肥工业大学《815机械原理》全套考研资料我们是布丁考研网合工大考研团队,是在读学长。
我们亲身经历过合工大考研,录取后把自己当年考研时用过的资料重新整理,从本校的研招办拿到了最新的真题,同时新添加很多高参考价值的内部复习资料,保证资料的真实性,希望能帮助大家成功考入合工大。
此外,我们还提供学长一对一个性化辅导服务,适合二战、在职、基础或本科不好的同学,可在短时间内快速把握重点和考点。
有任何考合工大相关的疑问,也可以咨询我们,学长会提供免费的解答。
更多信息,请关注布丁考研网。
以下为本科目的资料清单(有实物图及预览,货真价实):合肥工业大学《机械原理》全套考研资料1、合肥工业大学《机械原理》历年考研真题及答案解析2016年合肥工业大学《机械原理》考研真题(含答案解析)(11月份统一更新)2015年合肥工业大学《机械原理》考研真题(含答案解析)2014年合肥工业大学《机械原理》考研真题(含答案解析)2013年合肥工业大学《机械原理》考研真题(含答案解析)2012年合肥工业大学《机械原理》考研真题(含答案解析)2011年合肥工业大学《机械原理》考研真题(含答案解析)2010年合肥工业大学《机械原理》考研真题(含答案解析)2009年合肥工业大学《机械原理》考研真题(含答案解析)2008年合肥工业大学《机械原理》考研真题(含答案解析)2007年合肥工业大学《机械原理》考研真题(含答案解析)2006年合肥工业大学《机械原理》考研真题(含答案解析)2005年合肥工业大学《机械原理》考研真题(含答案解析)2004年合肥工业大学《机械原理》考研真题(含答案解析)2003年合肥工业大学《机械原理》考研真题(含答案解析)2002年合肥工业大学《机械原理》考研真题(含答案解析)2001年合肥工业大学《机械原理》考研真题(含答案解析)2000年合肥工业大学《机械原理》考研真题(含答案解析)1999年合肥工业大学《机械原理》考研真题(含答案解析)1998年合肥工业大学《机械原理》考研真题(含答案解析)1997年合肥工业大学《机械原理》考研真题(含答案解析)2、合肥工业大学《机械原理》本科生期中期末试题一份本试题含答案解析,此题收集于合工大校内,非常稀缺,认真对待。

我们也要正确面对考试成绩。
“不以物喜,不以己悲",胜败乃兵家常事,对于一次考试的成功,我们不能盲目乐观,无论是谁,都不可能完美无缺,也许你还有许多弱点和缺点没有暴露,每份试卷都 会有不同的结果。
应该说,良好的开端是成功的一半,那另一半就是你要善于总结,不停地拼搏。
假如你还一直陶醉在暂时的幸福中,失败只是迟早到来的结局。
在顺利登上理想的彼岸之前,不轻言成功,这才是我们应取的态度。
考试失利的同学也未必是坏事,失败是一支清醒剂,是不断成功的动力,即使我们一百次跌倒也要 第一百零一次爬起,因为我们正处在人生攀登的山腰上,还有好长的路等待我们去开拓、创造。
失败乃成功之母,有人说我怎么只遇到成功的母亲。
是的,关键是你 没有能抓住成功的父亲,那就是——“态度、目标、勤奋、恒心”。
态度决定一切。
有这样一句话:“当我冷眼旁观时,生命是一只蓝色的蛹;当我热情相拥时,生命是一只金色的蝶”。
学习也是这样,当你把学习当作自己成 长发展的需要时,才能体验到学习的快乐;当你把学习当作是一种负担时,学习就是一种痛苦。
谁愿在一片郁闷和痛苦中学习呢?所以说,我们首先要调整心态,以愉快的心情投入到紧张的学习生活中,并善于在学习的过程中体验获取知识的快乐,体验克服困难的快乐,体验取得成功的快乐。
1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
2017版合肥工业大学《815机械原理》全套考研资料我们是布丁考研网合工大考研团队,是在读学长。
我们亲身经历过合工大考研,录取后把自己当年考研时用过的资料重新整理,从本校的研招办拿到了最新的真题,同时新添加很多高参考价值的内部复习资料,保证资料的真实性,希望能帮助大家成功考入合工大。
此外,我们还提供学长一对一个性化辅导服务,适合二战、在职、基础或本科不好的同学,可在短时间内快速把握重点和考点。
有任何考合工大相关的疑问,也可以咨询我们,学长会提供免费的解答。
更多信息,请关注布丁考研网。
以下为本科目的资料清单(有实物图及预览,货真价实):合肥工业大学《机械原理》全套考研资料1、合肥工业大学《机械原理》历年考研真题及答案解读2016年合肥工业大学《机械原理》考研真题(含答案解读)(11月份统一更新)2015年合肥工业大学《机械原理》考研真题(含答案解读)2014年合肥工业大学《机械原理》考研真题(含答案解读)2013年合肥工业大学《机械原理》考研真题(含答案解读)2012年合肥工业大学《机械原理》考研真题(含答案解读)2011年合肥工业大学《机械原理》考研真题(含答案解读)2010年合肥工业大学《机械原理》考研真题(含答案解读)2009年合肥工业大学《机械原理》考研真题(含答案解读)2008年合肥工业大学《机械原理》考研真题(含答案解读)2007年合肥工业大学《机械原理》考研真题(含答案解读)2006年合肥工业大学《机械原理》考研真题(含答案解读)2005年合肥工业大学《机械原理》考研真题(含答案解读)2004年合肥工业大学《机械原理》考研真题(含答案解读)2003年合肥工业大学《机械原理》考研真题(含答案解读)2002年合肥工业大学《机械原理》考研真题(含答案解读)2001年合肥工业大学《机械原理》考研真题(含答案解读)2000年合肥工业大学《机械原理》考研真题(含答案解读)1999年合肥工业大学《机械原理》考研真题(含答案解读)1998年合肥工业大学《机械原理》考研真题(含答案解读)1997年合肥工业大学《机械原理》考研真题(含答案解读)2、合肥工业大学《机械原理》本科生期中期末试卷一份本试卷含答案解读,此题收集于合工大校内,非常稀缺,认真对待。
机械设计基础目录机械设计基础课程教学大纲 (1)机械设计基础课程教学教案 (8)机械设计基础 (21)实验指导书 (22)(一)螺纹联接 (4)(二)标准联接零件 (5)(三)键、花键及销联接 (6)(四)机械传动 (6)(五)轴系零、部件 (8)(六)弹簧 (9)(七)润滑剂及密封 (9)《机械设计基础》习题 (44)目录 (44)0绪论 (44)1平面机构及其自由度 (44)2平面连杆机构 (44)3凸轮机构 (44)4齿轮机构 (44)5轮系 (44)6其它常用机构 (44)7机械的动力性能 (44)8机械零件设计概论 (44)9联接 (44)10齿轮传动 (44)11蜗杆传动 (45)12带传动 (45)13链传动 (45)14轴 (45)15 滑动轴承 (45)17联轴器、离合器及制动器 (45)18弹簧 (45)19机械传动系统设计 (45)机械设计基础课程教学大纲一、课程的性质和任务机械设计基础是一门培养学生具有一定机械设计能力的技术基础课,为学生学习后续课程及解决生产实际问题奠定基础。
本课程教学内容方面应着重基本知识、基本理论和基本方法,在培养学生实践能力方面应着重设计技能的基本训练,同时注意培养学生正确的设计思想和严谨的工作作风。
本课程的主要任务是:1、掌握常用机构的基本原理、运动特性和机构动力学的基本知识,初步具有分析和设计基本机构的能力,并对机械运动方案的确定有一定的了解;2、掌握通用机械零件的工作原理、特点、选用和设计计算的基本知识,初步具有设计简单机械及普通机械传动装置的能力;3、具有运用标准、规范、手册、图册等有关资料的能力;4、能通过实验验证理论,并巩固和加深对理论的理解。
二、教学内容和基本要求1、教学基本内容机械设计基础的主要内容。
机械设计的一般步骤和原则。
平面机构的机构分析。
平面连杆机构。
凸轮机构。
齿轮机构。
轮系。
其它常用机构。
机构运动方案的选择。
机械调速,刚性回转件的平衡。
第5章 机械的效率和自锁5.1 复习笔记本章主要介绍了机械的效率和自锁条件的计算。
考试时,常与第4章摩擦力的计算及机构的受力分析综合考察,主要是计算题。
复习时需要把握其具体内容,重点掌握。
一、机械的效率1.功和效率(见表5-1-1)表5-1-1 功和效率注:η+ξ=1,由于实际情况下,摩擦损失不可避免,故必有η<1和ξ>0。
2.机器(或机组)的效率(见表5-1-2)表5-1-2 机器(或机组)的效率注:①若已知各机构的效率,则可计算确定整个机构的效率。
常用机构的效率见教材表5-1。
②设各机器的效率分别为η1、η2、…、ηk,输入功率分别为P1、P2、…P k,则各机器的输出功率分别为P1η1、P2η2、…、P kηk。
3.提高机械的效率的方法(1)减小介质阻力①使用流线型外形设计;②应注意高速旋转零件的结构设计,减小风阻。
(2)减小运动副中的摩擦①用滚动摩擦代替滑动摩擦;②注意各运动副的润滑;③对高速轴承可采用空气轴承、磁悬浮轴承等。
二、机械的自锁(见表5-1-3)表5-1-3 机械的自锁图5-1-1 移动副的自锁图5-1-2 转动副的自锁5.2 课后习题详解5-1 眼镜用小螺钉(M1×0.25)与其他尺寸螺钉(例如M8×1.25)相比,为什么更易发生自动松脱现象(螺纹中径=螺纹大径-0.65×螺距)?解:(1)求眼镜用小螺钉的螺纹升角M1×0.25型螺纹,其大径d′为1mm,螺距P′为0.25mm。
则M1×0.25螺钉的螺纹中径为d′2=(1-0.65×0.25)mm=0.8375mm;螺纹升角为α′=arctan(P′/d′2)=arctan(0.25/0.8375)=16.62°(2)求其他尺寸螺钉的螺纹升角同理,M8×1.25型螺钉,其大径d″为8mm,螺距P″为1.25mm。
则M8×1.25螺钉的螺纹中径为d″2=(8-0.65×1.25)mm=7.1875mm;螺纹升角为α′′=arctan(P′′/d′′2)=arctan(1.25/7.1875)=9.87°<α′。
合⼯⼤机械原理考研内部辅导课件合肥⼯业⼤学考研答疑课件第⼀章平⾯机构的结构分析⼀. 基本概念1. 机械: 机器与机构的总称。
机器: 具有三个共性。
机构: 只具有机器的前两个共性。
2. 构件与零件零件——制造单元构件——运动单元构件可以由⼀个零件或多个零件刚接⽽成3. 运动副: 两构件通过表⾯直接接触⽽形成的可动联接。
运动副元素: 两构件表⾯直接接触的点、线、⾯。
4. 运动副的分类:平⾯运动副:两构件在同⼀平⾯内作相对运动平⾯低副—两构件以⾯接触构成的可动联接平⾯⾼副—两构件以点或线接触构成的可动联接平⾯低副:转动副—联接的两构件只能作相对转动移动副—联接的两构件只能作相对移动空间运动副:两构件在不同平⾯内作相对运动5. 运动链: 多个构件以运动副联接⽽成的系统分类:空间运动链、平⾯运动链闭式运动链、开式运动链6. 机构:有机架并有确定运动的运动链分类:平⾯机构、空间机构⼆. 基本知识和技能1. 机构运动简图的绘制与识别图在机构运动简图中:运动副—按国家标准所规定的代表符号画出构件—⽤线段、⼩⽅块等简单图形画出尺⼨—按选定的⽐例画出2.平⾯机构的⾃由度的计算及机构运动确定性的判别F = 3n - 2P L- P Hn —活动构件数P L —低副数P H —⾼副数⾃由度计算时须注意:(1) K个构件在同⼀处构成的复合铰链中有( K - 1 )个转动副(2) 局部⾃由度应去除(通常每个滚⼦有⼀局部⾃由度)(3) 虚约束应去除。
(注意虚约束出现的场合)机构具有确定运动的条件F > 0 能动原动件数< F 机构运动不确定原动件数= F 机构运动确定原动件数> F 机构运动相互⼲涉F ≤0 不能动,为刚性构架3. 机构的结构分析(1)⾼副低代:⽤⼀个构件,两个低副代替⼀个⾼副须满⾜:代替前后机构的⾃由度不变代替前后机构的瞬时运动不变⾼副低代必须遵循⼀定的⽅法:曲线对曲线的⾼副低代点对曲线的⾼副低代曲线对直线的⾼副低代点对直线的⾼副低代2. 机构的结构分析(1)基本杆组及杆组的级别⾃由度为零的,不能再拆分的构件组Ⅱ级杆组:⼆杆三低副组Ⅲ级杆组:四杆六低副组含有⼀个带三低副的中⼼构件(2)机构的拆组及机构的级别从远离原动件的构件开始拆分杆组机构的级别由机构中杆组的最⾼级别所决定(3)机构的组成原理把杆组依次与机架和原动件相联得到机构第⼆章平⾯机构的运动分析⼀. 基本概念:(⼀)瞬⼼1. 瞬⼼的定义瞬⼼是两构件的瞬时等速重合点2. 机构中的瞬⼼数⽬机构中,每两个构件有⼀个瞬⼼。
2014年合肥工业大学815机械原理考研真题
2013年合肥工业大学机械原理考研真题
2012年合肥工业大学机械原理考研真题
2011年合肥工业大学机械原理考研真题
2009年合肥工业大学机械原理考研真题
2008年合肥工业大学机械原理考研真题
2007年合肥工业大学机械原理考研真题
2006年合肥工业大学机械原理考研真题
2005年合肥工业大学机械原理考研真题
2004年合肥工业大学机械原理考研真题
2003年合肥工业大学机械原理考研真题
2002年合肥工业大学机械原理考研真题
2001年合肥工业大学机械原理考研真题
2000年合肥工业大学机械原理考研真题
1999年合肥工业大学机械原理考研真题
1998年合肥工业大学机械原理考研真题
1997年合肥工业大学机械原理考研真题。
《机械原理》教案内容(2006版)0 绪论本章介绍了机械原理的研究对象及基本概念;机械原理课程的内容及地位、任务和作用;机械原理学科的发展趋势。
教学提示:本章的教学要求为:使学生了解本课程研究的对象、内容以及其在培养高级机械工程技术人才全局中地位、作用和任务,从而明确学习本课程的目的;使学生对机械原理学科的发展趋势有所了解。
本章重点在于让学生了解机械原理课程研究的对象和内容,明确学习本课程的目的和重要性,并通过绪论课的教学,调动学生学习本课程的欲望、兴趣和积极性。
第一章平面机构的结构分析本章主要介绍研究机构结构的目的;运动副、运动链和机构;平面机构运动简图;平面机构的自由度;平面机构的组成原理和结构分析。
教学提示:本章的教学要求有:了解机构的组成,搞清运动副、运动链、约束和自由度等基本概念;能绘制常用机构的机构运动简图;能计算平面机构的自由度;对平面机构组成的基本原理有所了解。
本章重点是运动副和运动链的概念、机构运动简图的绘制、机构具有确定运动的条件及机构自由度的计算。
至于平面机构的组成原理、结构分析及分类,以及高副低代等内容,则属于拓宽知识面的内容。
第二章平面机构的运动分析本章介绍研究机构运动分析的目的和方法;速度瞬心法及其在机构速度分析上的应用;用相对运动图解法求机构的速度和加速度;用解析法求机构的位置、速度和加速度;运动线图。
教学提示:本章的教学要求为:明确机构运动分析的目的和方法;理解速度瞬心的概念,能运用“三心定理”确定一般平面机构各瞬心的位置;能用瞬心法对简单的平面高、低副机构进行速度分析;能用解析法或图解法对平面机构进行运动分析。
速度瞬心概念及“三心定理”的运用是本章的重点之一。
在讲授用图解法作机构的运动分析时,重点放在如何应用相对运动图解法原理解机构构件上任意点和构件的运动参数上,这时的难点主要是对牵联运动为转动的两构件的重合点间的运动参数的求解。
在讲授用解析法作机构的运动分析时,重点放在通过机构位置矢量多边形建立机构的位置矢量方程上。