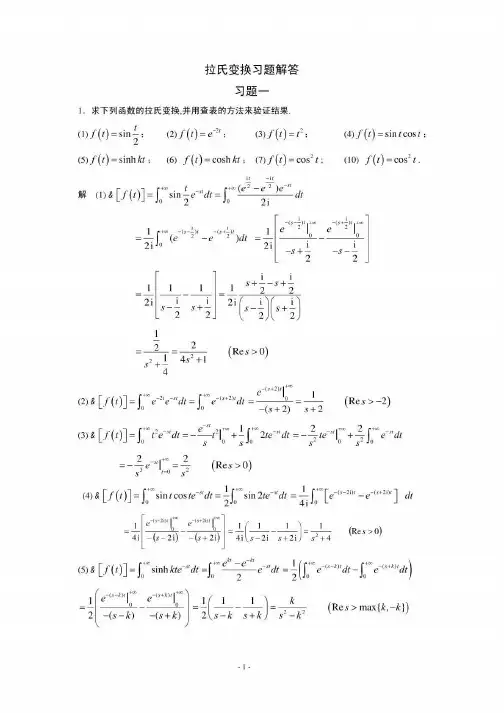
求下列函数的拉氏变换
- 格式:pdf
- 大小:201.28 KB
- 文档页数:9

拉普拉斯变换、复频域分析习题课1. 求下列函数的拉氏变换。
(1)1at e-- (2)sin 2cos t t + (3)2t te - (4)sin(2)t e t -(5)(12)t t e -+ (11)1()t t e e αββα---- (13)(2)(1)t te u t --- (15)()ta t e f a-,设已知[()]()L f t F s = 解:(1)11[1]()at a L e s s a s s a --=-=++ (2)2221221[sin 2cos ]111s s L t t s s s ++=+=+++ (3)221[](2)t L te s -=+ (4)22[sin(2)](1)4t L e t s -=++ (5)23[(12)](1)ts L t e s -++=+ (11)11111[()]()()()t t L e e s s s s αββαβααβαβ---=+=--++++ (13)由于(2)(1)(1)(1)[(1)](1)t t t teu t e t e e u t -------=-+- (15)[()](1)ta t L e f aF as a-=+2求下列函数的拉氏变换,注意阶跃函数的跳变时间。
(1)()(2)tf t e u t -=- (2)(2)()(2)t f t e u t --=- (3)(2)()()t f t e u t --= (4)()sin(2)(1)f t t u t =-(5)()(1)[(1)(2)]f t t u t u t =----解:(1)因为(2)2()(2)t f t ee u t ---=-,所以 222(1)11[()]11s s L f t e e e s s ---+==++ (2)21[()]1s L f t e s -=+ (3)因为2()()t f t e e u t -=,所以2[()]1e Lf t s =+ (4) ()sin[2(1)2](1) {sin[2(1)]cos 2cos[2(1)]sin 2}(1)f t t u t t t u t =-+-=-+-- 2222cos 2sin 22cos 2sin 2[()]()444s s s s L f t e e s s s --+=+=+++ (5)()(1)(1)(2)(2)(2)f t t u t t u t u t =-------222221111[()][1(1)]s s s s s L f t e e e s e e s s s s-----=--=-+ 3求下列函数的拉普拉斯逆变换。
第二章习题解题过程和参考答案第二章习题解题过程和参考答案2-1 试建立题2-1图所示各系统的微分方程 [其中外力)(t f ,位移)(t x 和电压)(t u r为输入量;位移)(t y 和电压)(t u c为输出量;k (弹性系数),μ(阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解:2-1(a) 取质量m 为受力对象,如图,取向下为力和位移的正方向。
作用在质量块m 上的力有外力f(t),重力mg ,这两个力向下,为正。
有弹簧恢复力[]0)(y t y k +和阻尼力()dy t dtμ,这两个力向上,为负。
其中,0y 为0)(=t f 、物体处于静平衡位置时弹簧的预伸长量。
根据牛顿第二定理F ma ∑=,有[]22()()()()dy t d y t f t mg k y t y m dt dtμ+-+-= 其中:0ky mg =代入上式得22)()()()(dt t y d mdt t dy t ky t f =--μ整理成标准式:22()()()()d y t dy t m ky t f t dt dtμ++=μμ()f t[()k y t +()dy t dt或也可写成:22()()1()()d y t dy t k y t f t dt m dt m mμ++=它是一个二阶线性定常微分方程。
2-1(b) 如图,取A 点为辅助质点,设该点位移为()Ax t ,方向如图。
再取B 点也为辅助质点,则该点位移即为输出量()y t ,方向如图A 点力平衡方程:1()()[()()][]AAdx t dy t k x t x t dt dtμ-=- ① B 点力平衡方程:2()()()[]Adx t dy t k y t dt dtμ=- ②由①和②:12[()()]()A k x t x t k y t -= 得:21()()()Akx t x t y t k=-二边微分:21()()()Adx t k dx t dy t dt dt k dt=-③将③代入②:221()()()()[]k dx t dy t dy t k y t dt k dt dtμ=--整理成标准式:1221()()()k k k dy t dx t y t k dt dtμ++=或也可写成:()A t AB1211212()()()()k k k dy t dx t y t dt k k k k dtμ+=++它是一个一阶线性定常微分方程。
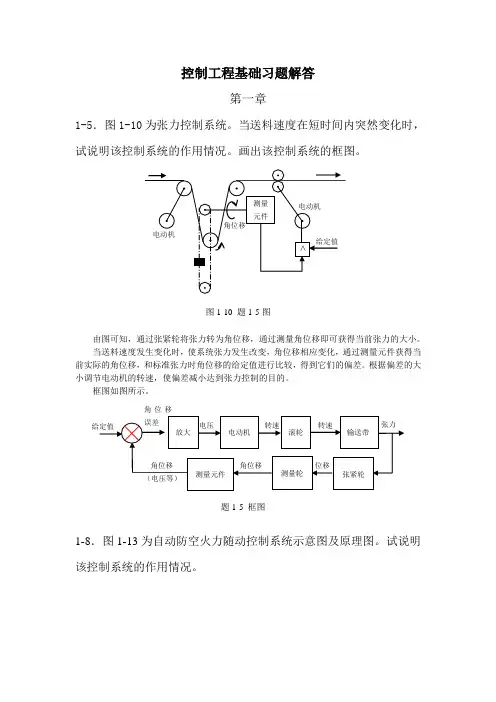
控制工程基础习题解答第一章1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
题1-5 框图电动机给定值角位移误差张力-转速位移张紧轮滚轮输送带转速测量轮测量元件角位移角位移(电压等)放大电压测量 元件>电动机角位移给定值电动机图1-10 题1-5图该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答第二章2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t e L t f L t(5). ()⎪⎭⎫⎝⎛+=35sin πt t f 图1-13 题1-8图敏感 元件定位伺服机构 (方位和仰角)计算机指挥仪目标 方向跟踪环路跟踪 误差瞄准环路火炮方向火炮瞄准命令--视线瞄准 误差伺服机构(控制绕垂直轴转动)伺服机构(控制仰角)视线敏感元件计算机指挥仪解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s s t t L t L t f L π2-6.试求下列函数的拉氏反变换。

信号与系统题目部分,(卷面共有200题,0.0分,各大题标有题量和总分) 一、选择题(7小题,共0.0分)[1]题图中,若h '(0)=1,且该系统为稳定的因果系统,则该系统的冲激响应()h t 为。
A 、231()(3)()5tt h t e e t ε-=+- B 、32()()()tt h t e e t ε--=+C 、3232()()55tt e t e t εε--+D 、3232()()55tt e t e t εε--+-[2]已知信号x[n]如下图所示,则x[n]的偶分量[]e x n 是。
[3]波形如图示,通过一截止角频率为50rad sπ,通带内传输值为1,相移为零的理想低通滤波器,则输出的频率分量为() A 、012cos 20cos 40C C t C t ππ++ B 、012sin 20sin 40C C t C t ππ++ C 、01cos 20C C t π+ D 、01sin 20C C t π+[4]已知周期性冲激序列()()T k t t kT δδ+∞=-∞=-∑的傅里叶变换为()δωΩΩ,其中2TπΩ=;又知111()2(),()()2T T f t t f t f t f t δ⎛⎫==++⎪⎝⎭;则()f t 的傅里叶变换为________。
A 、2()δωΩΩ B 、24()δωΩΩ C 、2()δωΩΩ D 、22()δωΩΩ[5]某线性时不变离散时间系统的单位函数响应为()3(1)2()kkh k k k εε-=--+,则该系统是________系统。
A 、因果稳定B 、因果不稳定C 、非因果稳定D 、非因果不稳定 [6]一线性系统的零输入响应为(23kk --+)u(k), 零状态响应为(1)2()k k u k -+,则该系统的阶数A 、肯定是二阶B 、肯定是三阶C 、至少是二阶D 、至少是三阶 [7]已知某系统的冲激响应如图所示则当系统的阶跃响应为。
Laplace拉氏变换公式表1. 常数变换:对于常数C,其拉普拉斯变换为C/s,其中s是复数频率。
2. 幂函数变换:对于幂函数t^n,其中n为实数,其拉普拉斯变换为n!/s^(n+1)。
3. 指数函数变换:对于指数函数e^(at),其中a为实数,其拉普拉斯变换为1/(sa)。
4. 正弦函数变换:对于正弦函数sin(at),其中a为实数,其拉普拉斯变换为a/(s^2+a^2)。
5. 余弦函数变换:对于余弦函数cos(at),其中a为实数,其拉普拉斯变换为s/(s^2+a^2)。
6. 双曲正弦函数变换:对于双曲正弦函数sinh(at),其中a为实数,其拉普拉斯变换为a/(s^2a^2)。
7. 双曲余弦函数变换:对于双曲余弦函数cosh(at),其中a为实数,其拉普拉斯变换为s/(s^2a^2)。
8. 指数衰减正弦函数变换:对于指数衰减正弦函数e^(at)sin(bt),其中a和b为实数,其拉普拉斯变换为b/(s+a)^2+b^2。
9. 指数衰减余弦函数变换:对于指数衰减余弦函数e^(at)cos(bt),其中a和b为实数,其拉普拉斯变换为s+a)/(s+a)^2+b^2。
10. 指数增长正弦函数变换:对于指数增长正弦函数e^(at)sin(bt),其中a和b为实数,其拉普拉斯变换为b/(sa)^2+b^2。
Laplace拉氏变换公式表11. 幂函数与指数函数的乘积变换:对于函数t^n e^(at),其中n为实数,a为实数,其拉普拉斯变换为n!/(sa)^(n+1)。
12. 幂函数与正弦函数的乘积变换:对于函数t^n sin(at),其中n为实数,a为实数,其拉普拉斯变换可以通过分部积分法得到。
13. 幂函数与余弦函数的乘积变换:对于函数t^n cos(at),其中n为实数,a为实数,其拉普拉斯变换可以通过分部积分法得到。
14. 指数函数与正弦函数的乘积变换:对于函数e^(at) sin(bt),其中a和b为实数,其拉普拉斯变换为b/(sa)^2+b^2。

第14 章 Laplace 变换1. 求下列函数的拉氏变换 (1)1cos wtw- (2)chwt 解 (1){}{}220sin 1cos sin ()tL wt wt wL Lwzdz w p p p w -⎧⎫===⎨⎬+⎩⎭⎰(2){}{}22111122wt wt pL chwt L e e p w p w p w-⎧⎫=+=+=⎨⎬-+-⎩⎭ 2.求下列函数的逆拉氏变换 (1)2845p p p +++; (2)222()p p a + 其中a >0。
解 (1)111222821645(2)1(2)1p p L L L p p p p ---⎧⎫⎧⎫⎧⎫++=+⎨⎬⎨⎬⎨⎬++++++⎩⎭⎩⎭⎩⎭22cos 6sin tt et e t --=+(2)1222sin ()2pt at L p a a -⎧⎫=⎨⎬+⎩⎭3. 设11()sin f t wt w=,2()f t chwt =,其中w ≠0,求12()()f t f t *。
解法1 由于{}{}{}1212L f f L f L f *=⋅ {}12211()sin L f t L wt w p w⎧⎫==⎨⎬+⎩⎭ {}{}222()pL f t L chwt p w ==-所以 {}1222221pL f f p w p w*=⋅+- 2222222()2()p pw p w w p w =--+2211cos 22L chwt L wt w w ⎧⎫⎧⎫=-⎨⎬⎨⎬⎩⎭⎩⎭2211cos 22L chwt wt w w ⎧⎫=-⎨⎬⎩⎭1221(cos )2f f chwt wt w *=- 解法2 由卷积定义求1201()()sin ()tf t f t w chw t d wτττ*=-⎰()()01sin 2w t w t te e w d w ττττ---+=⎰ ()()0011sin sin 22t t w t w t e w d e w d w w ττττττ---=+⎰⎰ 22221111sin cos sin 4444wt wt wt e wt w w w w =--++-2211cos 44wtt e w w -+ 2211cos 222wt wt e e wt w w -+=-21(cos )2chwt wt w =- 4.求解'1(0)0x x x +=⎧⎨=⎩解 对方程施行Laplace 变换,并注意初始条件:x(0)=0,我们有 [][][]'1L x L x L +=[][]1pL x L x p+=[]11111(1)1(1)L x p p p p p p ==-=-++--[]11111(1)tx L L x L e p p ---⎡⎤==-=-⎢⎥--⎣⎦5. 求解2'3(0)2tx x e x -⎧-=-⎨=⎩解 对方程两边施以Laplace 变换,并注意初始条件x(0)=0,则有[][]2'3tL x L x L e -⎡⎤-=-⎣⎦[][]3(0)2pL x x L x p ---=+ []311(1)(2)21L x p p p p -==--++-11211()()21t tx t L x L e e p p ---⎡⎤==-=-⎢⎥+-⎣⎦6. 求解01"(0),'(0)tx x e x x x x ⎧+=⎨==⎩解 对方程两边施以Laplace 变换得[][]"tL x L x L e ⎡⎤+=⎣⎦[][]20111p L x px x L x p --+=- 解得 []0122221111121212111x p x p L x p p p p p =--++-++++ 所以 101222211111()21212111x p x p x t L p p p p p -⎡⎤=--++⎢⎥-++++⎣⎦01111()cos ()sin 222t e x t x t =+-+- 7. 求解01"(0),'(0)tx x e x x x x ⎧-=⎨==⎩解 对方程两边施以Laplace 变换得 [][]"t L x L x L e ⎡⎤-=⎣⎦[][]201'(0)1p L x p xx L x p ---=- []201111p L x px x p ⎡⎤-=++⎣⎦- 解得 []2111()2(1)4(1)4(1)L x t p p p =-+--+ 012211x p x p p ++-- []101111()(())244t t t x t L L x t te e e x cht x sht --==-+++8. 求解"'2"'4(0)1,'(0)2,"(0)2x x x x x x --=⎧⎨===-⎩解 对方程两边施行Laplace 变换,并注三个初始条件,则有[][][][]"'2"'4L x L x L x L -+=[][]322(0)'()"(0)2(0)'(0)p x p x px x x p L x px x ⎡⎤------+⎣⎦[]4(0)L x x p-=[][][]3224222241p L x p p p L x p pL x p--+-+++-=[]224(1)5p p L x p p-=+- 解得 []222254()(1)(1)(1)p L x t p p p p p =-+--- 23421p p p =+-- 所以 []1()()342tx t L L x t t e -==+-9. 求解21"'2(0)'(0)"(0)0t x x t e x x x ⎧+=⎪⎨⎪===⎩ 解 对方程两边施以Laplace 变换并利用初始条件有 [][]21"'2tL x L x L t e ⎡⎤+=⎢⎥⎣⎦[][]3221(0)'(0)"(0)(1)p L x p x px x L x p ---+=-解得 []331()(1)(1)L x t p p =-+- 当331231,,ii p p e p e ππ-=-==是一阶极点,p=1是三阶极点,由留数计算公式:22331111Re ()lim 2(1)(1)ptpt p p d s F p e e dp p p →=⎡⎤⎡⎤=⎢⎥⎣⎦!+-⎣⎦2133448t t tt e te e =-+31311(1)Re ()|(1)24ptptt p p e p s F p e e p -=-=--⎡⎤==-⎣⎦+3332(1)Re ()|3i i pt ptp e p e e p s F p e p ππ==-⎡⎤==⎣⎦3Re ()iptp es F p e π-=⎡⎤=⎣⎦所以221331()44824t t t t t x t t e te e e -=-+--21cos 32te10. 求解3''21'4'30(0)(0)0x y x x y y x y ++=⎧⎪++=⎨⎪==⎩解 对方程组两边施行Laplace 变换,并设[][](),(),X L x t Y L y t ==得 1(32)(43)0p X pY p pX p Y ⎧++=⎪⎨⎪++=⎩解得 221111111765(116)5(1)431133(11176)25(1)10(116)Y p p p p p X p p p p p p --⎧==+⎪++++⎪⎨+⎪==--⎪++++⎩所以 [][]61116111113()251011()55t t t tx t L X e e y t L Y e e ------⎧==--⎪⎪⎨⎪==-+⎪⎩11. 求解0sin ()sin()()ta t G t t z G z dz =--⎰,a 为常数。
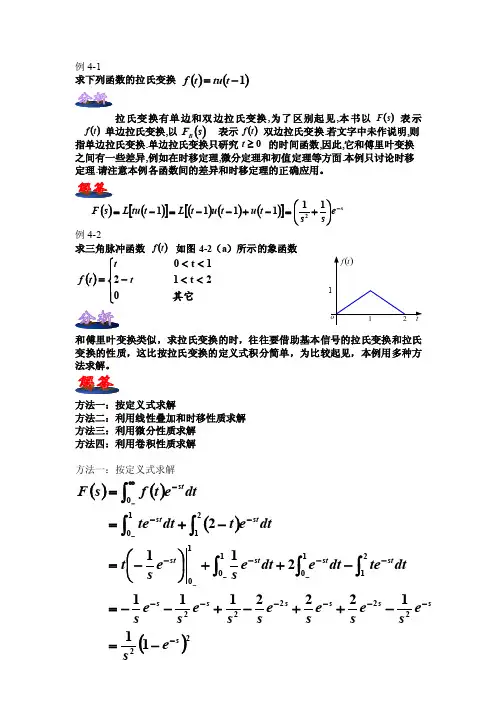
例4-1求下列函数的拉氏变换拉氏变换有单边和双边拉氏变换,为了区别起见,本书以表示 单边拉氏变换,以 表示 双边拉氏变换.若文字中未作说明,则 指单边拉氏变换.单边拉氏变换只研究 的时间函数,因此,它和傅里叶变换 之间有一些差异,例如在时移定理,微分定理和初值定理等方面.本例只讨论时移 定理.请注意本例各函数间的差异和时移定理的正确应用。
例4-2求三角脉冲函数 如图4-2(a )所示的象函数和傅里叶变换类似,求拉氏变换的时,往往要借助基本信号的拉氏变换和拉氏变换的性质,这比按拉氏变换的定义式积分简单,为比较起见,本例用多种方法求解。
方法一:按定义式求解方法二:利用线性叠加和时移性质求解 方法三:利用微分性质求解 方法四:利用卷积性质求解方法一:按定义式求解()()1-=t tu t f ()s F ()t f ()s F B ()t f 0≥t ()()[]()()()[]se s s t u t u t L t tu L s F -⎪⎭⎫ ⎝⎛+=-+--=-=1111112()tf ()⎪⎩⎪⎨⎧<<-<<=其它 02t 1 21t 0t t tf ()()()()222222221101010102101112221112112sss s s s s st st st st st st ste se s e s e s e s s e s e s dtte dt e dt e s e s t dt e t dt te dt e t f s F -------------∞--=-++-+--=-++⎪⎭⎫ ⎝⎛-=-+==⎰⎰⎰⎰⎰⎰-----方法二:利用线性叠加和时移性质求解由于于是方法三:利用微分性质求解信号的波形仅由直线组成,信号导数的象函数容易求得,或者信号经过几次微分后出现原信号,这时利用微分性质比较简单。
将 微分两次,所得波形如图4-2(b )所示显然根据微分性质由图4-2(b )可以看出于是方法四:利用卷积性质求解 可看作是图4-2(c )所示的矩形脉冲 自身的卷积 于是,根据卷积性质 而所以()()()()()()22112--+---=t u t t u t t tu t f ()[]()[]()0021st e s F t t f L s t tu L -=-=()()()222211211s s s ese e s s F ----=+-=()t f2()()()()[]()2221212s e t t t L dt t f d L --=-+--=⎥⎦⎤⎢⎣⎡δδδ()()()()---'-=⎥⎦⎤⎢⎣⎡00222sf f s F s dt t f d L (),00=-f ()00='-f ()()221s e s F s --=()()2211s es s F --=()()()t f t f t f 11*=()t f ()t f 1()()()s F s F s F 11=()()s e s s F --=111()()2211s e s s F --=例4-3应用微分性质求图4-3(a )中的象函数下面说明应用微分性质应注意的问题,图4-3(b )是 的导数 的波形。

★1.试求下列函数的拉氏变换:(1)f(t)=(4t+5) δ(t)+(t+2)·1(t); 解:F(s)=L[(4t) δ(t)]+L[5δ(t)]+L[t ·1(t)]+L[2·1(t)] =0+5+1/S 2+2/S=5+2/S+1/S 2(2)f(t )=sin(5t +3π)·1(t); 解:F(s)=L{[sin5t cos3π+cos5t sin3π]·1(t)}=L[21sin5t ·1(t)+23cos5t ·1(t)] =)25(2532++S S(4)f(t)=[4cos(2t-3π)]·1(t-6π)+t e 5-·1(t);解:F(s)=L{[4cos2(t-6π)]·1(t-6π)+t e 5-·1(t)}=22624+-s se s π+51+s =4426+-s se s π+51+s (7)f(t)=te6- (cos8t+0.25sin8t) ·1(t);解:F(s)=L[te6-cos8t ·1(t)+0.25te6-sin8t ·1(t)]=228)6(6+++s s +228)6(2++s =1001282+++s s s(2-(2))F(s)=412+s ; 解:f(t)=L -1{21×2222+s }=21sin2t ·1(t)★2-3.用拉氏变换法解下列微分方程:(1)22)(dt t x d + 6dt t dx )(+8x (t)=1,其中x(0)=1, 0)(|=t dtt dx =0;解:对原方程取拉氏变换,得 S 2X (s)-s x (0)-)0(x+6[s X (s)-x (0)]+8X (s)= s1将初始条件代入,得S 2X (s)-s+6s X (s)-6+8X (s)= s1(S 2+6s+8)X(s)=s1+s+6X(s)= )86(1622++++s s s s s =s 81+247+s +487+s取拉氏变换,得x(t)=81+47t e 2--87te 4-(2)dt t dx )(+10x(t)=2,其中x(0)=0;解:对原方程去拉氏变换,得s X(s)-x(0)+10X(s)= s2将初始条件x(0)=0代入,得s X(s)+10X(s)=s2由此得 X(s)=)10(2+s s =s0.2-100.2+s取拉氏变换,得x(t)=0.2(1-te10-)(3)dt t dx )(+100x(t)=300,其中0)(|=t dtt dx =50. 解:当t=0时,将初始条件)0(x=50代入方程,得 50+100x(0)=300 则x(0)=2.5对原方程去拉氏变换,得sX(s)-x(0)+100X(s)=s300将x(0)=2.5代入,得sX(s)-2.5+100X(s)= s300由此得X(s)= )100(3002.5s ++s s =s 3-1000.5+s取拉氏变换,得x(t)=3-0.5te100-★2-6化简图所示的方块图,并确定其传递函数。
习题八答案 1. 求下列函数的拉氏变换:(1) 3,,2()cos ,;2t f t t t ππ⎧<⎪⎪=⎨⎪≥⎪⎩ 解:由拉氏变换的定义知:22220231[()]3cos 1.1s s st stL f t e dt etdt e e s s ππππ+∞−−−−⎛⎞=+=−−⎜⎟+⎝⎠∫∫(2) ()cos ()sin ().f t t t t u t δ=⋅−⋅解:由拉氏变换的定义以及单位脉动函数的筛选性质知:0202221[()]cos ()sin ()cos |111.11st st st t L f t t t e dt t u t e dt t e s s s s δ+∞+∞−−−==⋅⋅−⋅⋅=⋅−+=−=++∫∫2. 求下列函数的拉氏变换:(1)2()1;f t t =−解:由拉氏变换的线性性质知:2332!121[()][][1].L f t L t L s s s s=−=−=− (2) ()1;tf t te =−解:由拉氏变换的线性性质和位移性质知:211[()][1][].(1)t L f t L L te s s =−=−− (3) ()cos ;f t t t =解:法一:利用位移性质。
()cos .2it ite ef t t t t −+==由拉氏变换的位移性质知:222211111[()][][].222()()(it its L f t L te L te s i s i s −⎡⎤−=+=+=⎢⎥−++⎣⎦211) 法二:利用微分性质。
令 则()cos ,g t t =2221()[()],'().1(s s G s L g t G s s s −===++21) 由拉氏变换的微分性质知:[cos ][()]'().L t t L tg t G s ==−即 2221[()].(1)s L f t s −=+ (4) 2()sin 6;tf t et −=解:因为 26[sin 6],36L t s =+ 故由拉氏变换的位移性知:26[()].(2)36L f t s =++ (5) 2()cos ;f t t = 解:1cos 2().2tf t +=故22211112[()][][cos 2].22224(4)s s L f t L L t s s s s +=+=+⋅=++ (6)()(1);tf t u e −=−解:因为1,10(1),0,10ttte u e e −−−⎧−>⎪−=⎨−<⎪⎩ 即: 1,0(1).0,0t t u e t −>⎧−=⎨<⎩ 故01[()]1.st L f t e dt s+∞−=⋅=∫(7) 2()(1);tf t t e =−解:22()(1)2.ttttf t t e t e te e =−=−+ 法一:利用拉氏变换的位移性质。
拉式变化公式表拉普拉斯变换(Laplace Transform)公式表:一、基本函数的拉普拉斯变换。
1. 单位阶跃函数。
- 函数定义:u(t)=0, t < 0 1, t≥0- 拉普拉斯变换:L[u(t)]=(1)/(s), Re(s)>02. 冲激函数(狄拉克δ函数)- 函数定义:δ(t),满足∫_-∞^∞δ(t)dt = 1且δ(t)=0 for t≠0 - 拉普拉斯变换:L[δ(t)] = 13. 指数函数。
- 函数定义:f(t)=e^at,其中a为常数。
- 拉普拉斯变换:L[e^at]=(1)/(s - a), Re(s)>a4. 正弦函数。
- 函数定义:f(t)=sin(ω t),其中ω为角频率。
- 拉普拉斯变换:L[sin(ω t)]=(ω)/(s^2)+ω^{2}, Re(s)>0 5. 余弦函数。
- 函数定义:f(t)=cos(ω t)- 拉普拉斯变换:L[cos(ω t)]=(s)/(s^2)+ω^{2}, Re(s)>0二、拉普拉斯变换的性质。
1. 线性性质。
- 若L[f_1(t)] = F_1(s),L[f_2(t)]=F_2(s),则对于任意常数a和b,L[af_1(t)+bf_2(t)]=aF_1(s)+bF_2(s)2. 时移性质。
- 若L[f(t)] = F(s),则L[f(t - t_0)u(t - t_0)]=e^-st_0F(s),其中t_0>03. 频移性质。
- 若L[f(t)] = F(s),则L[e^atf(t)]=F(s - a)4. 尺度变换性质。
- 若L[f(t)] = F(s),则L[f(at)]=(1)/(a)F((s)/(a)),a>05. 微分性质。
- 一阶导数:若L[f(t)] = F(s),则L[f^′(t)]=sF(s)-f(0)- 二阶导数:L[f^′′(t)] = s^2F(s)-sf(0)-f^′(0)- 一般地,n阶导数:L[f^(n)(t)]=s^nF(s)-s^n - 1f(0)-s^n - 2f^′(0)-·s - f^(n - 1)(0)6. 积分性质。
1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程扰动:扰动是一种对系统的输出产生不利影响的信号。
如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰是系统的输入量。
给定值:受控对象的物理量在控制系统中应保持的期望值参考输入即为给定值。
反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。
2 请说明自动控制系统的基本组成部分。
解:作为一个完整的控制系统,应该由如下几个部分组成:①被控对象:所谓被控对象就是整个控制系统的控制对象;②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常用的执行元件有阀、电动机、液压马达等。
③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量);④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值进行比较,求出它们之间的偏差。
常用的比较元件有差动放大器、机械差动装置和电桥等。
⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量是非电量,一般需要将其转换成为电量。
常用的测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器和功率放大级加以放大。
⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,用以改善系统的性能。
常用的校正元件有电阻、电容组成的无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统;开环系统优点:结构简单,缺点:控制的精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。
控制工程基础习题解答第二章2-1.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(1).()()t t f 3cos 15-= 解:()[]()[]9553cos 152+-=-=s ss t L t f L (2). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t eL t f L t(3). ()⎪⎭⎫⎝⎛+=35sin πt t f 解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s st t L t L t f L π 2-2.试求下列函数的拉氏反变换。
(1).()()11+=s s s F解:()[]()⎥⎦⎤⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+=---11121111s k s k L s s L s F L()10111==⎥⎦⎤⎢⎣⎡+=s s s s k ()()111112-=-=+⎥⎦⎤⎢⎣⎡+=s s s s k()[]te s s L s F L ----=⎥⎦⎤⎢⎣⎡+-=111111 (2).()()()321+++=s s s s F解:()[]()()⎥⎦⎤⎢⎣⎡+++=⎥⎦⎤⎢⎣⎡+++=---3232121111s k s k L s s s L s F L()()()1223211-=-=+⎥⎦⎤⎢⎣⎡+++=s s s s s k ()()()2333212=-=+⎥⎦⎤⎢⎣⎡+++=s s s s s k ()[]tt e e s s L s F L 231123221-----=⎥⎦⎤⎢⎣⎡+++-=(3).()()()2222522+++++=s s s s s s F 解:()[]()()⎥⎦⎤⎢⎣⎡+++++=⎥⎦⎤⎢⎣⎡+++++=---22222225232112211s s k s k s k L s s s s s L s F L()()()22222225221-=-=+⎥⎦⎤⎢⎣⎡+++++=s s s s s s s k ()()()3331331222222513223222232==-=---=-+---=++⎥⎦⎤⎢⎣⎡+++++=--=+k k jjjjk k k j s s s s s s s s j s k s k ()[]()()t e e s s s L s s s s L s F Ltt cos 32111322223322221211-----+-=⎥⎦⎤⎢⎣⎡+++++-=⎥⎦⎤⎢⎣⎡+++++-=2-3.用拉氏变换法解下列微分方程(1)()()()()t t x dt t dx dt t x d 18622=++,其中()()00,10===t dt t dx x 解:对方程两边求拉氏变换,得:()()()()()()()()()()()()()()()()()[]()0,8747818747814242168616181618060042132132122222≥-+==-===++++=++++=++++==+-+-=+-+=-----t e e s X L t x k k k s k s k s k s s s s s s s s s s s X ss X s sX s s X s ss X x s sX t dt t dx sx s X s t t(2)()()210=+t x dtt dx ,其中()00=x 解:对方程两边求拉氏变换,得:()()()()()()()()()[]()0,515151511010221021001012121≥-==-==++=+==+=+---t e s X L t x k k s k s k s s s X s s X s sX ss X x s sX t(3)()()300100=+t x dtt dx ,其中()500=x 解:对方程两边求拉氏变换,得:()()()()()()()()()[]()0,4734731001003005030010050300100010012121≥+====++=++==+-=+---t e s X L t x k k s k s k s s s s X ss X s sX s s X x s sX t2-4.某系统微分方程为()()()()t x dtt dx t y dt t dy i i 322300+=+,已知()()0000==--i x y ,其极点和零点各是多少?解:对方程两边求拉氏变换,得:()()()()()()()()()()()233223323022030000-=-=++==+-=+-z p i i i i s s s s s X s Y s G s X x s sX s Y y s sY2-5.试求图2-25所示无源网络传递函数。
7.利用拉氏变换的性质求下列函数的拉氏变换.(1)()teet fatbt-=. (2)()ttt f2sin2=.(3)()tttt fωωωcossin-=(4)()ttt fωsh=.解(1)&()[]=t f&⎰∞=⎥⎦⎤⎢⎣⎡-satbttee&[]duee atbt-⎰∞∞--=--=⎪⎭⎫⎝⎛---=s s bsasaubuduaubulnln11|(2)&()[]=t f&[]2222)1(2sindsdtt-=&[]t2sin()3222224161242+-=⎪⎭⎫⎝⎛+=sssdsd(3)&()[]=t f&[]=-tttωωωcossin&[]ωω-tsin&[]ttωcosdsdsωωω++=22&[]⎪⎭⎫⎝⎛+++=2222cosωωωωωωsst()22232ωω+=s(4)&()[]=t f&[]dsdttsh-=ω&[]tshω()222'21121ωωωω-=⎪⎭⎫⎝⎛+---=ssss8.求下列函数的拉氏逆变换.(1)().412+=ssF(2)().14ssF=(3)()().114+=ssF(4)().31+=ssF(5)().9322++=sssF(6)()()().313-++=ssssF(7)().612-++=ssssF(8)().134522+++=ssssF解(1)()=t f&()[]211=-sF&ts2sin214221=⎥⎦⎤⎢⎣⎡+-(2)()=t f&!31141=⎥⎦⎤⎢⎣⎡-s&313161!3ts=⎥⎦⎤⎢⎣⎡+-(3)由&341611ts=⎥⎦⎤⎢⎣⎡-及位移性质&()[]()t feasF at=--1得()=t f&()[]=-sF1&()t e ts--=⎥⎦⎤⎢⎣⎡+3416111(4)()=t f&()[]=-sF1&tes3131--=⎥⎦⎤⎢⎣⎡+(5)()=t f&()[]21=-sF&+⎥⎦⎤⎢⎣⎡+-921ss&tts3sin3cos29321+=⎥⎦⎤⎢⎣⎡+-(6)()=t f&()[]=-sF1&()()⎥⎦⎤⎢⎣⎡-++-3131sss=&231133211=⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛+---ss&213-s11-⎥⎦⎤⎢⎣⎡-&⎥⎦⎤⎢⎣⎡+-111stt ee--=21233(7)()=t f&()[]=-sF1&=⎥⎦⎤⎢⎣⎡-++-6121sss&⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛++--3223511ss53=&52211+⎥⎦⎤⎢⎣⎡--s&tt ees321525331--+=⎥⎦⎤⎢⎣⎡+(8)()=t f&()[]=-sF1&=⎥⎦⎤⎢⎣⎡+++-1345221sss&()()⎥⎦⎤⎢⎣⎡++++-22132122ss2=&()()31322221+⎥⎦⎤⎢⎣⎡+++-ss&()⎥⎦⎤⎢⎣⎡++-221323s()ttetete ttt3sin3cos6313sin313cos2222+=+=---9.设()()t ftf21,均满足拉氏变换存在定理的条件(若它们的增长指数均为c)且&()[](),11sFtf=&()[](),22sFtf=,则乘积()()t f t f21的拉氏变换一定存在,且&()()[]()()⎰∞+∞--=ii2121i21ββπdqqsFqFtftf其中.Re,0cs+>>ββ证由于()()t ftf21,均满足拉氏变换存在定理的条件以及增长指数均为c,知乘积()()t f t f21也一定满足拉氏变换存在的定理的条件且增长指数为.2c根据拉氏存在定理的证明当c>β时,&()()[]()()⎰+∞-=2121,dtetftftftf st在0Re cs+≥β上存在且一致收敛.由于()()⎰∞+∞-=ii11i21ββπdteqFtf qt而&()()[]()()⎰+∞-=2121dtetftftftf st()()⎰⎰+∞-∞+∞-⎪⎭⎫⎝⎛=2i i 1i21dt e t f dq e q F st qt ββπ()()⎰⎰+∞--∞+∞-=0)(2i i 1i 21dtdq e t f q F q s ββπ()()dqq s F q F -=⎰∞+∞-2i i 1i 21ββπ10.求下列函数的拉氏逆变换(像原函数),并用另一种方法加以验证.(1)().122a s s F +=(2)()()().b s a s s s F --=(3)()()()2b s a s cs s F +++=(4)()()222222a sa s s F ++=(5)()().1322s a s s F +=(6)()()()b s a s s s F ++=1(7)().144a s s F -= (8)()()22112--+=s s s s s F(9)()().1122-=s s s F (10)()()()4122++=s s ss F(1)解法1 ()=t f &()[]=-s F 1&⎥⎦⎤⎢⎣⎡+⋅-2211a s a aa 1=&a ata s a sin 221=⎥⎦⎤⎢⎣⎡+- 解法2()⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡+=i ,Res i ,Res 2222a a s e a a s e t f st st a at a e a e at at sin i 2i 2i i =-=-解法3 ()=t f &=⎥⎦⎤⎢⎣⎡+-2211a s &⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+---i 1i 1i 211a s a s a i 21a =(&-⎥⎦⎤⎢⎣⎡--i 11a s &⎥⎦⎤⎢⎣⎡+-i 11a s ) ()a at e e a at at sin i 21i i =-=-(2)解法1 ()=t f &()[]=-s F 1&()()⎥⎦⎤⎢⎣⎡---b s a s s1()()()()⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡--=b b s a s se a b s a s se st st ,Res ,Res()bt at bt at be ae b a a b be b a ae --=-+-=1解法2 ()=t f&()[]=-sF1&()()⎥⎦⎤⎢⎣⎡---bsass1=&⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-----bsbasaba11ba-=1(a&bas-⎥⎦⎤⎢⎣⎡--11&⎥⎦⎤⎢⎣⎡--bs11()btat beaeba--=1(3)解法1 ()=t f&()[]s F1-()()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-++++⎥⎥⎦⎤⎢⎢⎣⎡-+++=bbsasecsabsasecs stst,Res,Res22()()bsstateascsdsdabeac-=-⎪⎭⎫⎝⎛+++--=2()()btbtat ebacatebabcebaac-----+--+--=22解法2 ()=t f&()[]=-sF1&()()⎥⎦⎤⎢⎣⎡+++-21bsascs=&()()()⎥⎦⎤⎢⎣⎡+⋅--++⋅--++⋅---2221111bsbabcbsbacaasbaac()2baac--=&()211bacaas--+⎥⎦⎤⎢⎣⎡+-&baacbs--+⎥⎦⎤⎢⎣⎡+-11&()⎥⎥⎦⎤⎢⎢⎣⎡+-211bs ()()btbtat tebabcebacaebaac-----+--+--=22(4)解法1 ()=t f&()[]=-sF1&()⎥⎥⎦⎤⎢⎢⎣⎡++-2222212asas=&⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫⎝⎛+++⋅-'222212123assasaaa23=&21221+⎥⎦⎤⎢⎣⎡+-asa&⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫⎝⎛+'221assattatacos21sin23-=解法2 ()=t f&()[]s F1-()()⎥⎥⎦⎤⎢⎢⎣⎡-+++⎥⎥⎦⎤⎢⎢⎣⎡++=i,2Resi,2Res2222222222aeasasaeasas stst()()i222i222i2i2asstasst easasdsdeasasdsd-==-++++=ta t a t a t a te e a te e a i i i i 41i 4341i 43-----= at t at a cos 21sin 23-=(5)解法1 ()=t f &()2322111a s a s =⎥⎦⎤⎢⎣⎡+-&()⎥⎦⎤⎢⎣⎡+--223111a s s s(12a =&-⎥⎦⎤⎢⎣⎡-311s &())1221⎥⎦⎤⎢⎣⎡+-as s⎰-=t t a 03221(1&)1221dt a s ⎥⎦⎤⎢⎣⎡+-⎪⎭⎫ ⎝⎛-=⎰t atdt a t a 032sin 12121()at a t a cos 1121432--=解法2 ()=t f &()⎥⎦⎤⎢⎣⎡+-32211s a s()()()⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡+=i ,Res i ,Res 0,Res 322322322a s a s e a s a s e s a s e stst st()()3i 3i 02222i i 2i i 221a a e a a e a s e ds d ta t a s st --+⎪⎪⎭⎫ ⎝⎛+=-=()at a t a cos 1121422--=(6)解法1 ()=t f &()()⎥⎦⎤⎢⎣⎡-+-b s a s s 11=&()()⎥⎦⎤⎢⎣⎡+⋅--+⋅-+⋅-b s b a b a s b a a s ab 1111111=ab 1&()b a a s -+⎥⎦⎤⎢⎣⎡-111&()b a b a s -1-⎥⎦⎤⎢⎣⎡+-11&⎥⎦⎤⎢⎣⎡+-b s 11()()bt at e b a b e b a a ab -----+=111解法2 ()=t f &()()⎥⎦⎤⎢⎣⎡++-b s a s s 11()()()()()()⎥⎦⎤⎢⎣⎡-+++⎥⎦⎤⎢⎣⎡-+++⎥⎦⎤⎢⎣⎡++=b b s a s s e a b s a s s e b s a s s e stst st ,Res ,Res 0,Res()()bt at e b a b e b a a ab -----+=111(7)解法1 ()=t f&⎥⎦⎤⎢⎣⎡--4411as=&⎥⎦⎤⎢⎣⎡+-⎪⎭⎫⎝⎛+---22331211141asaaasasa()ataeeaatat sin214133--=-()atatasinsh213-=解法2 ()=t f&⎥⎦⎤⎢⎣⎡--4411as⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡-=i,Resi,Res,Res,Res44444444aaseaaseaaseaase stststst()()3i3i33i4i444aeaeaeae t ataatst-++-=--()atatasinsh213-=(8)解法1 ()=t f&()=⎥⎦⎤⎢⎣⎡--+-221112ssss&()⎥⎦⎤⎢⎣⎡-+-+--2112121sss=&+⎥⎦⎤⎢⎣⎡--s11&+⎥⎦⎤⎢⎣⎡--121s&()⎥⎦⎤⎢⎣⎡--2112stt tee221++-=解法2()=t f&()⎥⎦⎤⎢⎣⎡--+-221112ssss()()⎥⎦⎤⎢⎣⎡--++⎥⎦⎤⎢⎣⎡--+=1,112Res0,112Res2222stst essssessss12121=⎪⎪⎭⎫⎝⎛-++-=sstesssdsdtt tee221++-=(9)解法1 ()=t f&()[]=-sF1&()⎥⎦⎤⎢⎣⎡--11221ss=&()teessstt--=⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛+----21111112121tsht-=解法2 ()()()()⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡-=1,1Res1,1Res0,1Res222222ssessesset fstststtteesedsd ttsst-=-+⎪⎪⎭⎫⎝⎛-=-=sh2212(10)解法1 ()=t f &()()⎥⎦⎤⎢⎣⎡++-41221s s s =&⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+-+-4131221s s s s(31=&-⎥⎦⎤⎢⎣⎡+-121s s &()t t s s 2cos cos 31)421-=⎥⎦⎤⎢⎣⎡+-解法2 =)(t f &()()⎥⎦⎤⎢⎣⎡++-41221s s s()()()()()()()()⎥⎦⎤⎢⎣⎡-+++⎥⎦⎤⎢⎣⎡+++⎥⎦⎤⎢⎣⎡-+++⎥⎦⎤⎢⎣⎡++=i 2,41Res i 2,41Res i ,41Res i ,41Res 22222222s s se s s se s s se s s se stst st st ()()()()()i 41i 4i 2i 41i 4i 24i i 2i 4i i 2i 2i 22i 22i 2i -+-++++--++=--tt t t e e e e6666i 2i 2i i t t t t e e e e --+++= ()t t 2cos cos 31-=。
B2.1 求下列函数的拉氏变换:
B2.2 求下列函数的拉氏反变换:
B2.3 求下列矩阵的逆矩阵:
B2.4 在图B2.4所示的电路中电压u1(t)为输入量,试以电压u2(t)或u C2(t)作为输出量,分别列写该系统的微分方程。
图B2.4 电路原理图
B2.5 图B2.5是一种地震仪的原理图,其壳体1固定在地基2上,重锤3的质量为m,由装在壳体上的弹簧和阻尼器支承。
图中x为壳体相对于惯性空间的位移,z为质量m相对于惯性空间的位移,y=x-z为质量m相对于壳体的位移,可由指针4指示出来。
当地震时壳体随地基上下震动,但由于惯性的作用使得重锤的运动幅度很小,故它与壳体之间的相对运动幅度y就近似等于地震的幅度。
设重锤的质量为m(kg),弹簧的刚性系数为k(N/m),阻尼器的粘性摩擦系数为f(N·s/m),试列写以指针位移y为输出量时系统的微分方程。
(注:z为静平衡时质量m的位移,重力使弹簧产生的变形已经加以考虑了。
)
图B2.5 地震仪原理图
图B2.6 机械系统原理图
B2.6 设机械系统如图B2.6所示,图中z i为输入位移,z o为输出位移。
试分别列写各系统的微分方程。
B2.7 例A1.2所讨论的液位控制系统(如图1.29所示),设液箱的横截面积为S,希望的液位高度为h 0,若液位高度的变化率与液体流量差(Q1-Q2)成正比,试列写以液位高度为输出量时系统的微分方程。
B2.8 设系统的微分方程为
试用拉氏变换法进行求解。
B2.9 已知控制系统的微分方程(或微分方程组)为
式中r(t)为输入量,y(t)为输出量,z1(t)、z2(t)和z3(t)为中间变量,τ、β、K1和K2均为常数。
试求:(a)各系统的传递函数Y(s)/R(s);(b)各系统含有哪些典型环节?
B2.10 求题B2.4~B2.7各系统的传递函数。
B2.11 设控制系统的结构图如图B2.11所示,图中G1(s)和G2(s)所对应环节的微分方程分别为0.125u•+u=e•+3e和0.5y¨+y•=2u,试求该系统的传递函数Y(s)/R(s)和E(s)/R(s)。
图B2.11 控制系统方块图
B2.12 已知控制系统在零初始条件下,由单位阶跃输入信号所产生的输出响应为 y(t)=1+e-t-2e-2t试求该系统的传递函数,和零极点的分布并画出在S平面上的分布图。
B2.13 求图B2.13所示无源网络的传递函数U o(s)/U i(s)。
图B2.13 无源网络原理图
B2.14 求图B2.14所示运算放大器的传递函数U o(s)/U i(s)。
图B2.14 有源网络原理图
B2.15 已知控制系统的结构图如图B2.15所示,试应用结构图等效变换法求各系统的传递函数。
图B2.15 控制系统结构图
B2.16 已知控制系统的信号流图如图B2.16所示,试分别应用信号流图化简规则和梅森公式求各系统的传递函数。
图B2.16 控制系统信号流图
B2.17 求图B2.17所示闭环控制系统的传递函数Φ(s)=Y(s)/R(s)和Φe(s)=E(s)/R(s)。
图B2.17 闭环控制系统信号流图(简记Gi=G i(s),H i=H i(s),R=R(s),E=E(s),Y=Y(s)) B2.18 已知控制系统的结构图,如图B2.18所示。
要求:(1)分别应用结构图等效变换法和梅森公式求各闭环系统的传递函数Y(s)/R(s)和E(s)/R(s);(2)欲使图B2.18(a)系统的输出Y(s)不受扰动D(s)的影响,试问其条件是什么?
图B2.18 控制系统结构图
B2.19 已知多变量控制系统的结构图或信号流图,如图B2.19所示。
试求:(1)各系统的输入输出传递函数阵;(2)列写图(c)所示系统的受控对象、控制器和反馈通道的传递函数阵G(s)、G c(s)和H(s);(3)用两种方法写出图(c)所示系统的闭环传递函数阵Φ(s)。
B2.20 将下列微分方程组写成向量矩阵形式的状态空间表达式:
u2为网络的输出电压。
图B2.21 电路系统原理图
B2.22 图B2.22所示为一个质量-弹簧系统,设两个物体的质量分别为m1和m2,两个弹簧的刚性系数分别为k1和k2,不计摩擦的作用,该机械系统的输入量为外作用力F(t),输出量为质量m2的位移y(t)。
试求:(1)系统的状态空间表达式;(2)系统的结构图及其输入输出传递函数。
图B2.22 质量 弹簧系统原理图
B2.23 已知控制系统的状态变量图,如图B2.23所示。
要求:(1)确定状态变量并列写系统的状态空间表达式;(2)求系统的闭环传递函数。
图B2.23 控制系统状态变量图
B2.24 已知系统的状态空间表达式如下所示,试求各系统的传递函数(阵):
B2.25 已知系统的状态方程如下所列,试求该系统的输入输出微分方程:
B2.26 设系统的传递函数为
试用时域法求系统的状态空间表达式:(1)选取状态变量 x1=y,x2=y•,列写系统的状态方程;
(2)选取状态变量,列写系统的状态方程,并确定上述两种形式状态方程之间的线性变换阵P。
B2.27 已知控制系统的传递函数如下所示,试用直接分解法求系统的状态空间表达式:
B2.28 分别用串联分解法和并联分解法,列写下列系统的状态方程:
B2.29 已知控制系统的结构图如图B2.29所示,试用结构图分解法求系统的状态空间表达式。
图B2.29 控制系统结构图
B2.30 试求图B2.30所示机械系统的传递函数,并根据相似性原理画出其模拟电路图。
图B2.30 机械系统原理图
B2.31 试用MATLAB 求题B2.20所示系统的传递函数和零极点的分布。
B2.32 在图B2.32所示的反馈控制系统结构图中,各个环节的传递函数如下所列。
试用MATLAB 求系统的状态空间表达式和传递函数以及零极点的分布。
(1)G c (s)=(169.6s+400)/[s(s+4)]
G(s)=(211.87s+317.64)/[(s+20)(s+94.34)(s+0.1684)]
H(s)=1/(0.01s+1)
(2)G c (s)=1/s
G(s)=(35786.7s+108444)/[(s+4)(s+20)(s+74.04)]
H(s)=1/(0.01s+1)
图B2.32 反馈控制系统结构图
B2.33 已知控制系统的状态空间表达式为
[]x
y u x x 011101100
03
0013=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−−=• 试用MATLAB 求:(1)系统的传递函数;(2)系统零极点、传递函数零极点以及系统的解耦零点。