安川_DX100使用说明书_安全
- 格式:pdf
- 大小:992.47 KB
- 文档页数:21
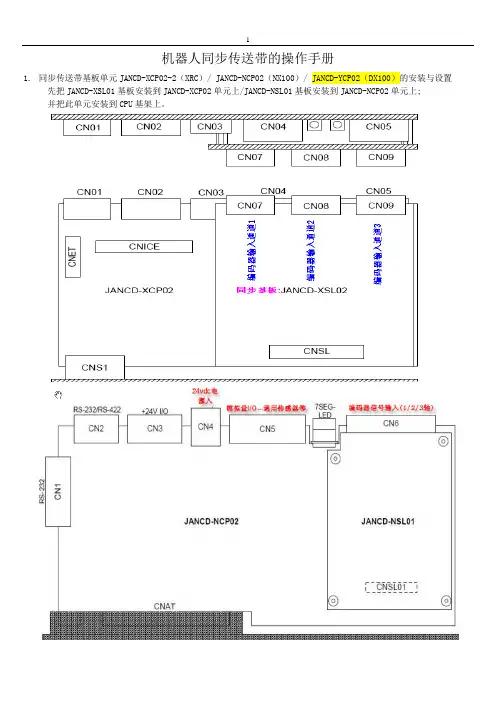
机器人同步传送带的操作手册1.同步传送带基板单元JANCD-XCP02-2(XRC)/ JANCD-NCP02(NX100)/ JANCD-YCP02(DX100)的安装与设置先把JANCD-XSL01基板安装到JANCD-XCP02单元上/JANCD-NSL01基板安装到JANCD-NCP02单元上;并把此单元安装到CPU基架上。
DX100-ycp022.设定2.机器人同步基板的配置与设置㈠.管理模式,机器人主菜单下[机器人]菜单画面下,选择[传送带文件],弹出以下设置参数画面。
其中:①文件号:传送带特性文件号码如下表所示②使用状态(使用/不使用)设定使用或者不使用传送带特性文件③接口(CN1/CN2/CN3)选择使用已经连接的编码器输入,使用这个接口来启动同步功能的原点输入开关启动机器人同步跟踪功能.★信号XRC中CNPG07这个接口对应CN1,CNPG08对应CN2,CNPG09接口对应CN3★在Nx100机器中NCP02的CN06接口的P1组接线为对应CN1,P2组接线为对应CN2等,参见接线图)编码器与机器人间的配线。
④编码器断线检测(开/关)检测编码器输入线路连接的状态,如果编码器断线则产生1400报警[传输编码器异常],切断机器人伺服电源,机器发生重大故障,要解除机器人故障,先把同步跟踪编码器及线路修复好,才解除故障。
⑤编码器输入类型(编码器/虚拟编码器)指定是外部给机器人同步基板的编码器输入类型是使用实际编码器还是使用虚拟编码器来实现机器人同步跟踪功能控制。
如果选择虚拟脉冲类型编码器,机器人控制系统的同步机能也能执行/实现同步跟踪功能(即便是没有连接输入编码器信号或者传送带没有运行)。
在调试时,选择哪种类型进行跟踪测试.⑥编码器符号(向前/退后)指定从编码器反馈的脉冲位置是传送带向前运转的还是退后运转的方向.当选择“退后”模式时,传送带跟踪位置的等号和数据在传送带监视器画面下的数值数据是有符号.所以,机器人控制器执行连续跟踪在退后运动方向的跟踪模式。


第5天硬件篇1.4.1 NX100 的技术规格中型机和大型机1. NX100 的技术规格 11.4.2 控制柜内的冷却系统4119报警:风扇cps—420F 小型中型或大型2.单元及基板的说明2.1 电源接通单元轴控制基板:2 单元及基板的说明 2.3 CPU 单元2.3.1 CPU 单元的构成2 单元及基板的说明2 单元及基板的说明控制电源(CPS-420F)WAGO 插座配线要领:1.将配线工具的A部插入图中所示的孔中。
2.按下图箭头方向压下配件工具时插入或拔出电线。
3.取出工具。
2 单元及基板的说明轴控制基板(SGDR-AXA01A):。
机器人I/F 单元(JZNC-NIF01):由机器人I/F 基板和输入输出基板组成。
机器人I/F 基板(JANCD-NIF01):安全双回路信号。
输入/ 输出基板(JANCD-NIO01)数字输入输出(通用输入输出)用的插座有4 个。
输入输出的点数为输入40 点、输出40 点。
输入/ 输出分为两种类型:即通用输入/ 输出和专用输入/ 输出。
输入/ 输出的信号分配随其用途不同而有所不同。
专用输入/ 输出是一个预先决定了用途的信号,使用就行。
通用输入/ 输出可以自己编辑定义。
当外部操作设备如系统固定夹具控制柜和集中控制柜将机器人和相应的设备作为一个系统来控制时,要使用专用输入/ 输出。
通用输入/ 输出主要在程序中使用,可以用作机器人和外部设备的定时信号。
2 单元及基板的说明机器人通用输入/ 输出插座的连接(CN07, 08, 09, 10)I/O单元2 单元及基板的说明通用输入/ 输出信号分配 弧焊2 单元及基板的说明弧焊2 单元及基板的说明弧焊2 单元及基板的说明弧焊2 单元及基板的说明电源接通顺序基板(JANCD-NTU01- ) 防碰撞传感器的连接(SHOCK)直接连接来自防碰撞传感器的信号线2 单元及基板的说明用机器人内部电缆连接防碰撞传感器时2 单元及基板的说明机器人专用输入端子台(MXT)外部急停2 单元及基板的说明 安全开关2 单元及基板的说明 安全插销的安装(一个带触点的开关)2 单元及基板的说明 外部伺服电源接通2 单元及基板的说明 外部暂停2 单元及基板的说明2.10 伺服单元2.10.1 各个单元的说明整流器用整流器将交流电源(3 相: AC200/220V) 转换为直流电源,并提供此电源给每个轴所用的PWM 放大器。
【安川机器人】dX100机器人培训2在当今高度自动化的工业生产领域,机器人技术的应用日益广泛。
安川机器人作为行业内的佼佼者,其 dX100 机器人更是以出色的性能和强大的功能备受关注。
为了让更多的操作人员能够熟练掌握 dX100 机器人的使用,一场专业的培训势在必行。
一、培训前的准备在正式开始培训之前,学员们需要对机器人的基本概念和工作原理有一定的了解。
这包括机器人的机械结构、控制系统、传感器等方面的知识。
同时,学员们还需要熟悉培训场地的环境和安全注意事项。
培训场地通常会配备完整的 dX100 机器人系统,包括机器人本体、控制器、示教器以及相关的周边设备。
为了确保培训的效果和安全,场地会进行合理的布局和规划,设置明确的安全标识和防护设施。
二、dX100 机器人的硬件介绍dX100 机器人的本体设计紧凑,动作灵活,能够适应各种复杂的工作场景。
它由多个关节组成,每个关节都配备了高精度的电机和减速器,以实现精确的运动控制。
机器人的控制器是整个系统的核心,负责处理各种指令和信号,实现对机器人的精确控制。
控制器的操作界面简洁直观,易于上手。
示教器则是操作人员与机器人进行交互的重要工具。
通过示教器,操作人员可以对机器人进行编程、示教、监控等操作。
示教器的按键布局合理,功能明确,能够大大提高操作的效率和准确性。
三、软件系统与编程基础dX100 机器人配备了强大的软件系统,为编程和操作提供了便利。
在培训中,学员们将学习如何使用安川机器人的专用编程软件,掌握基本的编程语法和逻辑。
编程的基础包括机器人的运动指令、I/O 控制指令、逻辑判断指令等。
通过这些指令的组合,可以实现各种复杂的机器人动作和任务。
例如,运动指令可以控制机器人的关节运动、直线运动和圆弧运动等。
I/O 控制指令则用于与外部设备进行通信和交互,实现机器人与周边设备的协同工作。
逻辑判断指令可以根据不同的条件执行相应的操作,使机器人具备一定的智能判断能力。
DX100防爆特殊型蓄电池单轨吊车使用维护说明书执行标准 Q/140000TKD026-2010 太原矿机电气发展有限公司目录一、概述 (1)二、单轨吊车的基本参数 (1)三、单轨吊车特点 (1)四、各功能车及安全注意事项 (2)五、单轨吊车的运行操作 (13)六、单轨吊车的维护与保养 (16)七、常见故障及排除方法 (19)八、操作注意事项 (27)九、单轨吊轨道系统 (27)一、概述DX100防爆特殊型蓄电池单轨吊车,是一种煤矿井下辅助运输机车。
行驶在单轨上,不仅可以运送材料、人员和设备,还可以完成井下设备的简单提升、吊装等工作,是一种多功能、高效率、多用途的井下辅助运输车辆。
在平路或上坡时,由蓄电池提供动力完成牵引工作;下坡时,可将动能和势能转化成电能,反冲给蓄电池,靠能量回馈实现自动减速制动。
当单轨吊紧急停车、禁止牵引或超速保护时,制动夹紧缸失压,制动机构压缩着的弹簧紧急释放,刹车蹄快速夹紧导轨,靠磨擦力,实现紧急制动停车。
DX100防爆特殊型蓄电池单轨吊车由左、右司机室、控制车、电池车、起吊梁、驱动车、电控系统、液压系统等部件组成。
二、单轨吊车的基本参数三、单轨吊车特点(一)、单轨吊优缺点:1、能更有效地利用巷道断面,受底板因素影响小。
2、具有一定爬坡能力,能适应井下巷道起伏、转弯半径小的环境,可进入多分支岔道,实现一条龙不转载运输,机动灵活,使用维护人员少。
3、与同功能地轨式运输设备比,初期投资少运行维护费用低。
4、需要有可靠的悬吊单轨的吊挂承力装置,对顶板岩石强度或支护的要求较高。
5、单轨吊与齿轨车及无轨胶轮车比较,运行速度慢,长距离运输耗用时间长。
6、与柴油机单轨吊机车比,无污染无异味,节能绿色环保,投资少运行维护费用低。
(二)、单轨吊的适应性1、适应巷道底鼓较严重或底板条件差的矿井。
2、适应机械化水平较高、生产效率高、下井人员少的矿井。
3、对开采稳定性好、厚度大的近水平或缓斜煤层,开拓大巷沿煤层布置,岩巷工程量小的矿井;采区巷道倾角一般小于8°,局部不大于12°,宜选用单轨吊。
机器人培训第一天1 安全z 1.1 确保安全专门培训!强制z示教和维护机器人的人员必须事先经过培训。
z关于培训的更多信息请咨询首钢莫托曼机器人有限公司。
安装篇1 安全1.2 机器人使用说明书清单1 安全1.3操作人员安全注意事项•!注意!注意z绝不要倚靠在DX100 或其他控制柜上;不要随意地按动操作键。
•在操作期间,绝不允许非工作人员触动DX100。
1 安全z 1.4 机器人的安全注意事项z 1.4.1 安装及配线安全z选择一个区域安装机器人,并确认此区域足够大,以确保装有工具的机器人转动时不会碰着墙、安全围栏或控制柜。
z接地工程要遵守电气设备标准及内线规章制度。
(以防触电,火灾)搬运时注意z机器人本体尽可能用天车来搬,吊车,吊具或叉车由专人进行操作。
z搬运时尽可能按照机器人出厂姿态,(空间小,绳不会碰到电缆)z起吊DX100 时,请检查下列事项:(吊环螺栓,钢丝绳)z如果在安装前需临时保管机器人,则应将其放在稳固的平面上,并采取措施以防非工作人员随意触动。
!注意z确认有足够的空间来维修机器人、DX100 和其它外围设备。
z为了确保安全, 一定要在能看得见机器人的位置进行操作。
z DX100 应安装在机器人动作范围的安全围栏之外。
z针对各种机器人,应按说明书中规定的螺栓大小及类型来安装机器人.!注意z设定后将DX100 的位置固定。
z为DX100 配线前须熟悉配线图,配线须按配线图进行。
z在进行DX100 与机器人、外围设备间的配线及配管时须采取防护措施,如将管、线或电缆从坑内穿过或加保护盖予以遮盖,以免被人踩坏或被叉车辗压而坏。
1 安全1.4.2 作业区安全z在机器人周围设置安全围栏,以防造成与已通电的机器人发生意外的接触。
在安全围栏的入口处要张贴一个“远离作业区”的警示牌。
安全围栏的门必须加装可靠的安全联锁装置。
z备用工具及类似的器材应放在安全围栏外的合适地区内。
1 安全z 1.4.3 操作安全z当往机器人上安装一个工具时,务必先切断(OFF) 控制柜及所装工具上的电源并锁住其电源开关,而且要挂一个警示牌(禁止通电)。
机器人培训第二天操作篇2 机器人的坐标系2.1 机器人轴与坐标系机器人各轴的名称2 机器人的坐标系•关节坐标系:机器人各轴进行单独动作。
•直角坐标系:不管机器人处于什么位置,均沿设定的x,y,z轴平行移动。
•圆柱坐标系:机器人以本体z轴为中心旋转运动或与z轴成直角平行运动•工具坐标系:把机器人腕部法兰盘所持工具的有效方向作为Z轴,并把坐标定在工具的尖端点上。
•用户坐标系:机器人沿所指定的用户坐标系各轴平行移动。
•2.2 基本操作2.2.1•键,按以下顺序变化。
直角坐标与圆柱坐标的选择:• 2.2.3 手动速度的选择•用手动速度键进行选择•按手动速度[ 高] 键,每按一次,手动速度按以下顺序变化:微动、低、中、高。
•按手动速度[ 低] 键,每按一次,手动速度按以下顺序变化:高、中、低、微动。
•机器人各轴进行单独动作。
也可以同时按两个键,进行合成动作运动。
• 2.4 直角坐标系:机器人沿设定的x,y,z轴平行移动。
• 2.5 圆柱坐标系:2• 2.6 把机器人腕部法兰盘所持工具的有效方向作为Z轴,并把坐• 2.6.1•工具坐标系把机器人腕部法兰盘所握工具的有效方向定为定义在工具尖端点,所以工具坐标的方向随腕部的移动而发生变化。
•工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无•••••2 212 6543••••••2 543212 67 82 1092 •3212 •3212 •321•在机器人动作允许范围内的任意位置,设定••••••••••2 ••3212 •212 5432 •321•••••••••机器人在未规定采取何种轨迹移动时,使用关节插补。
(转换•用直线插补示教的程序点,以直线轨迹移动其他用途弧焊用途••••••3.••位置等级是指机器人经过示教的位时的接近程度。
•1说明操作步骤3. 4532•••输入参考点命令•参考点命令是指设定摆焊壁点等辅助点的位置数据的命令。
参考点命令•••••••前进/前进/ 后退的自由曲线运动向自由曲线插补的最初程序点移动时所做的运动时直线运动。
DX100
使用说明书
请务必确保本使用说明书到达本产品的最终使用者手中。
MOTOMAN 使用说明书一览
MOTOMAN-□□□使用说明书
DX100 使用说明书
DX100 操作要领书
DX100 维护要领书
「DX100操作要领书」根据用途不同内容有异,请一定确认与用途是否相同.
DX100
DX100
安全注意事项
使用前(安装,运转,保养,检修),请务必熟读并全部掌握本说明书和
其他附属资料,在熟知全部设备知识,安全知识及注意事项后再开始使
用。
本说明书中的安全注意事项分为“危险”,“注意”,“强制”,“禁止”
四类分别记载。
另外,即使是 “注意”所记载的内容,也会因情况不同而产生严重后果,
因此任何一条注意事项都极为重要,请务必严格遵守。
DX100
DX100
本书常用词汇定义
“MOTOMAN”是安川电机工业机器人的商品名。
MOTOMAN由机器人本体“机器人”,机器人控制柜,示教编程器和“供电
电缆”构成。
在本书中,这些部分如下表表示。
机器人各部分 本书的表示
DX100控制柜DX100
DX100 示教编程器示教编程器
供电电缆
机器人与控制柜之间的
电缆
DX100
另外,示教编程器的键,按钮,画面的表示方法如下所示:
操作步骤的表达方式的定义
操作步骤的说明中, "选择 …… "表示的操作方法,是把光标移到选择
对象上,再按[选择]键,或者直接在触摸屏上触摸选择。
DX100
警示牌的说明
下列警示牌牌贴在机器人及 DX100上。
要完全遵照警示牌执行。
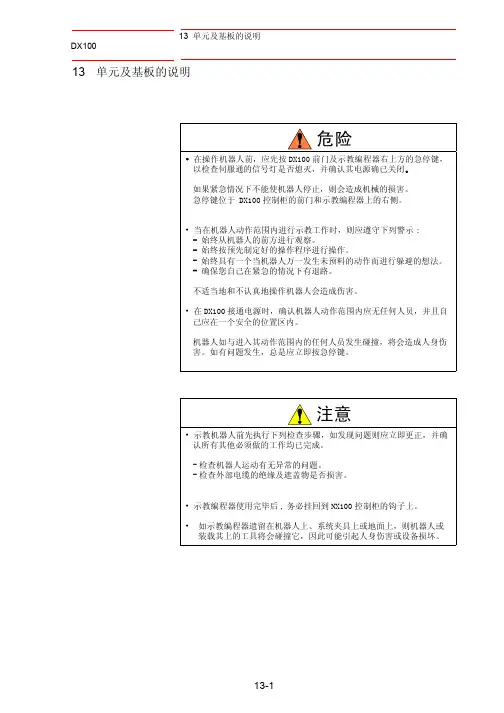
1 安全
DX100 1.1 确保安全
1安全
1.1确保安全
机器人与其他机械设备的要求通常不同,如它的大动作范围、快速的操
作、手臂的快速动作等,这些都会造成安全隐患。
为了确保安全,请在理解机器人《使用说明书》等基础上再使用。
另外请遵守如下所写的国家或者省市规定的法律及安全卫生规则。
1 安全
DX100 1.2 特别培训
1.2特别培训
1.MOTOMAN的操作、保养培训是指遵守劳动安全卫生法的基础上进行的《特
别培训》。
1 安全
DX100 1.3 MOTOMAN的使用说明书一览表
1.3MOTOMAN的使用说明书一览表
1 安全
DX100 1.4 关于人员的安全事项
1.4关于人员的安全事项
机器人在空间动作,动作领域的空间成为危险场所,还有可能发生意外的
事故。
MOTOMAN的安全管理者及从事安装、操作、保养的人员要保持安全第一、
在确保自己自身的安全及相关人员及其他人员的安全后进行操作。
1 安全
DX100 1.4 关于人员的安全事项
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1.5关于MOTOMAN的安全事项
1.5.1安装配线时的安全
安装及配线的详细请参考MOTOMAN-□□□机器人使用说明书及DX100使用
说明书。
安装、配线、配管时要考虑到非常时不要被“夹住”或者是“绊倒”,另
外为了安全运行,MOTOMAN机器人和夹具等都要便于操作、查看。
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1.5.2作业现场的安全
在作业区内工作时粗心大意会造成严重的事故,为了确保安全,因此强令
执行下列防范措施。
1.5.3操作安全
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1 安全
DX100 1.5 关于MOTOMAN的安全事项
1 安全
DX100 1.6 移动及转让机器人的注意事项
1.6移动及转让机器人的注意事项
移动、转让、保养、出售机器人时,应遵守下列安全防范事项:
1 安全
DX100 1.7 MOTOMAN机器人报废时的注意事项
1.7MOTOMAN机器人报废时的注意事项
1-14。