第二章平面机构的结构分析
- 格式:pptx
- 大小:3.40 MB
- 文档页数:100
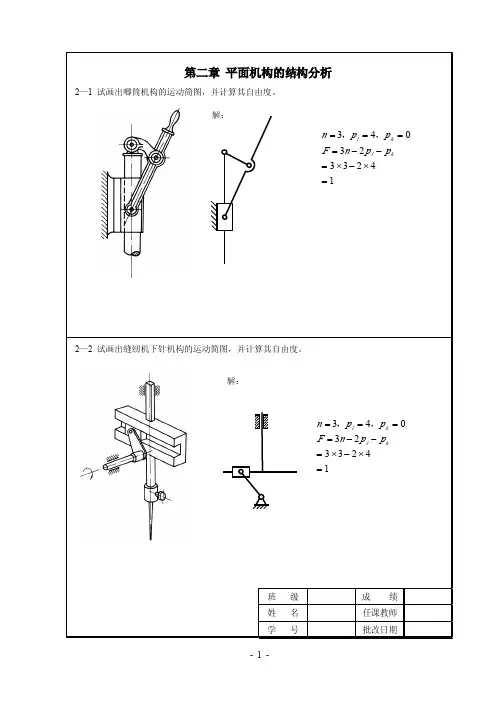


《机械设计基础》第二章平面机构的结构分析测验题班级:姓名:学号:成绩:一、填空题(每空2分,共16分)1. 机构具有确定运动的条件:机构的原动件数目=机构的自由度数。
2. 计算平面机构自由度的公式为 F=3n-(2PL +PH),应用此公式时应注意判断是否有复合铰链、局部自由度及虚约束。
3. 某平面机构有5个低副,1个高副,机构自由度为1,则该机构具有5个构件。
4. 在平面机构中,具有2个约束的运动副是低副,具有1个约束的运动副是高副。
二、单选题(每题2分,共20分)1.以下不属于机器的执行部分的是()。
A 数控机床的刀架B 工业机器人手臂C 汽车的车轮D 空气压缩机2.()保留了2个自由度,带进了一个约束。
A 高副B 移动副C 转动副D 低副3. 若复合铰链处有5个构件汇集在一起,应有()个转动副。
A 4B 3C 2D 54.在比例尺μl=20 mm/mm 的机构运动简图中,量得一构件的长度是10mm,则该构件的实际长度为()mm。
A 20B 50C 200D 5005.两个以上的构件共用同一转动轴线,所构成的转动副称为()。
A 复合铰链B 局部自由度C 虚约束D 单一铰链6.计算机构自由度时,对于局部自由度应()。
A 除去不计B 考虑C 部分考虑D 转化成虚约束7.火车车轮在轨道上转动,车轮与轨道构成()副。
A 移动B 高C 低D 转动8.在机构中采用虚约束的目的是为了改善机构的运动状况和()。
A 美观B 对称C 受力情况D 增加重量9. 为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。
A 构件数、运动副的类型及数目B 构件的运动尺寸C 机架和原动件D 以上都是10.计算机构自由度时,若计入虚约束,则机构的自由度就会()A 增多B 减少C 不变三、判断题(每题2分,共20分)1.一个作平面运动的构件有2个独立运动的自由度。
(×)2.平面低副机构中,每个转动副和移动副所引入的约束条件是相同的。
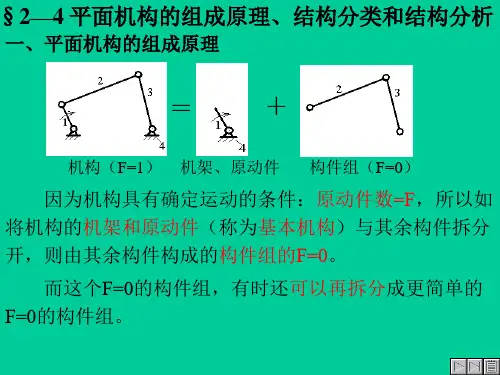
第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。
要想使该机构具有确定的运动,就要设法使其再增加一个自由度。