高速图像采集与处理共46页
- 格式:ppt
- 大小:4.39 MB
- 文档页数:46


密级学号毕业设计(论文)《机器人焊接电弧高速图像的采集与分析》院(系、部):继续教育学院姓名:刘娟年级:2011级专业:电气工程及其自动化指导教师:申爱明教师职称:讲师2013 年5 月31日·北京目录第一章前言 (5)1.1 现代焊接技术简介 (5)1.2 机器人焊接发展过程及其简介 (6)1.2.1 机械手臂或操作系统 (7)1.2.2 焊接部件 (7)1.2.3 机器人控制系统 (7)1.3 机器人焊接研究现状及未来趋势 (8)1.4 焊接系统的组成和工作原理 (10)1.5 焊接电弧现象 (12)1.5.1 焊接电弧的基本概念 (12)1.5.2 焊接电弧的引燃 (13)1.5.3 焊条的加热和熔化 (13)1.5.4 焊接电弧的基本特点 (13)1.5.5 焊接电弧的组成 (13)第二章机器人焊接高速电弧图像采集与分析实验原理及相关技术 (15)2.1 机器人焊机电弧高速图像采集与分析简介 (15)2.2 高速图像采集系统原理 (15)2.2.1 普通CMOS高速摄像系统介绍 (15)2.2.2 摄像系统总体结构. (16)2.3 高速摄像机的介绍 (17)2.4 高速摄像装置光路及其背光技术简介 (19)2.4.1 高速摄像装置及其光路图 (19)2.4.2 滤光片和可调减光镜的选择 (19)2.4.3 背光光源的选择 (21)2.5 合理选择放大率 (23)2.6 正确选择摄像参数 (23)2.7焊接电弧波形信号采集系统简介 (24)第三章焊接电弧高速图像采集与分析实例 (25)3.1 不同滤光镜下的拍摄效果 (25)3.2 焊接电弧高速图像采集与分析实例 (25)3.2.1 低氢焊条发生电弧环绕套筒内边缘旋转的高速摄影 (25)3.2.2 焊条电弧焊时下落的熔滴的高速摄影 (26)3.2.3 电弧力引起大颗粒飞溅的高速摄影 (27)3.2.4 焊条发生爆炸过渡过程的高速摄影 (27)3.2.5 药芯焊丝CO2气体保护焊在小参数下熔滴排斥过渡时的高速摄影 (28)第四章心得与体会 (29)4.1 结论总结 (29)4.2 对进一步研究的展望 (29)参考文献 (31)致谢 (33)声明 (34)摘要进行了焊接电弧高速图像和信号波形的同步采集和再现研究,给出了电弧图像和波形在线具体实现技术,并利用该技术成功进行了电弧光谱信息检测熔滴过渡过程、二氧化碳短路过渡过程和变极性MIG 焊电弧行为的研究。

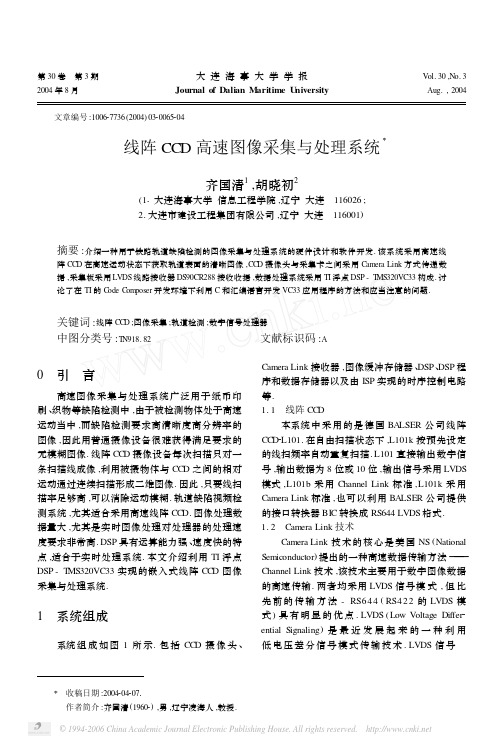
第30卷 第3期大连海事大学学报V ol.30,N o.3 2004年8月Journal of Dalian Maritime U niversity Aug.,2004文章编号:100627736(2004)0320065204线阵CCD高速图像采集与处理系统Ξ齐国清1,胡晓初2(11大连海事大学信息工程学院,辽宁大连 116026;2.大连市建设工程集团有限公司,辽宁大连 116001)摘要:介绍一种用于铁路轨道缺陷检测的图像采集与处理系统的硬件设计和软件开发.该系统采用高速线阵CC D在高速运动状态下获取轨道表面的清晰图像,CC D摄像头与采集卡之间采用Camera Link方式传递数据,采集板采用LVDS线路接收器DS90CR288接收收据,数据处理系统采用TI浮点DSP-T MS320VC33构成.讨论了在TI的C ode C omposer开发环境下利用C和汇编语言开发VC33应用程序的方法和应当注意的问题.关键词:线阵CC D;图像采集;轨道检测;数字信号处理器中图分类号:T N918.82 文献标识码:A0 引 言高速图像采集与处理系统广泛用于纸币印刷、织物等缺陷检测中,由于被检测物体处于高速运动当中,而缺陷检测要求高清晰度高分辨率的图像,因此用普通摄像设备很难获得满足要求的无模糊图像.线阵CC D摄像设备每次扫描只对一条扫描线成像,利用被摄物体与CC D之间的相对运动通过连续扫描形成二维图像.因此,只要线扫描率足够高,可以消除运动模糊.轨道缺陷视频检测系统,尤其适合采用高速线阵CC D.图像处理数据量大,尤其是实时图像处理对处理器的处理速度要求非常高.DSP具有运算能力强、速度快的特点,适合于实时处理系统.本文介绍利用TI浮点DSP-T MS320VC33实现的嵌入式线阵CC D图像采集与处理系统.1 系统组成系统组成如图1所示.包括CC D摄像头、Camera Link接收器,图像缓冲存储器、DSP、DSP程序和数据存储器以及由ISP实现的时序控制电路等.1.1 线阵CC D本系统中采用的是德国BA LSER公司线阵CC D2L101.在自由扫描状态下,L101k按预先设定的线扫频率自动重复扫描.L101直接输出数字信号,输出数据为8位或10位,输出信号采用LVDS 模式,L101b采用Channel Link标准,L101k采用Camera Link标准,也可以利用BA LSER公司提供的接口转换器BIC转换成RS644LVDS格式.1.2 Camera Link技术Camera Link技术的核心是美国NS(National Semiconductor)提出的一种高速数据传输方法———Channel Link技术,该技术主要用于数字图像数据的高速传输.两者均采用LVDS信号模式,但比先前的传输方法-RS644(RS422的LVDS模式)具有明显的优点.LVDS(Low Voltage Differ2 ential Signaling)是最近发展起来的一种利用低电压差分信号模式传输技术.LVDS信号Ξ收稿日期:20042042071作者简介:齐国清(19602),男,辽宁凌海人,教授.图1 系统组成框图为以+1.2V 为基准300mV 差分形式,LVDS 低电压摆幅差分模式具有高速传输数据时交叉干扰小、E MI 干扰小等优点.Channel Link 采用LVDS 方式传输数据,但是将28位数据转换成串行方式在4对线路上传输,再用另外一对线路传输时钟信号,最高传输率可达2.38G b/s ,传输距离可达10m.NS 的LVDS 发送器DS90CR287完成并行TT L/C M OS 信号到LVDS 信号的转换,LVDS 线路接收器DS90CR288将LVDS 信号还原成并行TT L/C M OS 信号.1.3 DSP 图像采集与处理系统CC D 输出图像数据经Camera Link 连线以串行方式接口连到图像采集板,由LVDS 线路接收器DS90CR288将其恢复成并行TT L/C M OS 信号,并分离出8位图像数据和像素时钟信号PixClk 及行有效信号Line Valid.每512行构成一幅图像保存在由512k ×8位SRAM (CY 7C1049)构成的输入图像缓冲存储器BRAM 当中,图像的写入控制信号和地址由ISP 根据PixClk 和Line Valid 信号产生.处理器采用TI 的32位浮点DSP C3x 系列的最新产品———T MS320VC33.由于DSP 片内存储器仅有34k ×32位,远远不能满足系统的要求,在片外设置了4个存储区:512k ×8位输入图像缓冲存储器BRAM (1片CY 7C1049),占用DSP 系统中的地址为0C00000H~0CFFFFFH ,512k ×8位的图像存储器IRAM (1片CY 7C1049),地址为600000H ~6FFFFFH ,固化程序的512k ×8位EPROM ,地址为000000H ~3FFFFFH ,256k ×32位的程序存储器PRAM (2片CY 7C1041),地址为400000H ~4FFFFFH ,256k ×32位的数据存储器DRAM (2片CY 7C1041,地址为500000H ~5FFFFFH ,以及作为开关量输出的存储器映射I O 口,对应的地址为0E00000H ~0EFFFFFH.程序固化在8位的EPROM (或F LASH )中,系统加电时由DSP 内的BootLoader 程序自动加载到DSP 片内RAM 或PRAM 中运行.地址译码及时序控制信号的产生由一片ISP (ispLS2128VE )来完成.T MS320VC33需要3.3V (DVDD )和1.8V (C VDD )两种电源供电,利用TI 的电源芯片TPS767D318可以直接产生3.3V 和1.8V 并同时产生DSP 加电复位信号RESET.12MH z 外部时钟直接加到DSP 的EXTC LK 端,C LK M D1和C LK M D0均接高电平,使DSP 内部P LL 工作在5倍频状态,产生120MH z 内部时钟信号H1.2 DSP 软件开发VC33的外部存储器及DM A 、定时器和串行通信口等外部接口设备都是在相应的控制寄存器的控制下工作的,因此程序开始运行前要对这些控制寄存器进行适当的设置.外部存储器控制寄存器(存储器映射地址为808064h )中的WTC NT 域(7~5位)用来设定DSP 对外存储器进行操作时插入的等待周期数,以适应不同速度的存储器.WTC NT 的默认值时111,即插入7个等待周期,若不需要插入这么多等待周期,则应当在程序开始处首先将外部存储器控制寄存器的WTC NT 设为相应的值.本系统中DSP 时钟频率为120MH z ,对应的指令周期约为8.3ns ,而外部存储器CY 7C1041和CY 7C1049的读写周期为20ns ,因此需要插入2个等待周期.决定EPROM (F LASH )的等待周期的总线控制寄存器控制字已经和程序代66 大连海事大学学报 第30卷 码一起写到了EPROM中.TI的浮点DSP集成开发软件C ode C om poser 支持用C语言开发程序,使用C编译器时应注意堆(Heap)和栈(Stack)的长度的设定.C编译器支持malloc()函数进行存储器的动态分配,动态存储器的分配是在堆中进行的.C编译器使用一个专用的未初始化的段.sysmem来构造堆.堆的默认长度为1k,若程序中需要进行动态分配存储器的空间大于1k,则应当在linker的2heap选项中设定堆的大小.C编译器用栈保存函数调用时传递参数和返回地址、分配局部变量及保存临时结果, C编译器使用一个专用的未初始化的段.stack来构造栈,C编译器为栈设的默认长度也是1k.C编译器并不检测栈的溢出,因此应当保证栈足够大.若程序中需要更长的栈,例如程序中使用了较大的局部数组变量,则应当在linker的2stack选项中设定栈的大小.而程序中的全局变量和静态变量在.bss段中分配.由于系统的存储器空间有限,堆、栈及.bss段都要在数据存储器中分配,因此堆和栈的长度要根据程序的实际需要合理设定.C编译器默认的存储模式为small m odel,即存储全局变量和静态变量的.bss段小于64k.此时C 编译器只在程序开始运行时设定DP寄存器值,使其指向.bss段的开始处,在程序运行过程中访问static变量、global变量及constant table时不再修改DP值.因此,当.bss段的实际长度大于64k时,必须选择big m odel.这样,C编译器每次访问.bss 段中全局变量和静态变量时会自动设置DP值,否则将得不到正确的地址.在汇编程序中定义的局部的符号变量(symbol)一般是与代码一起在. text段分配存储单元的,而.bss段与.text段一般是分别在不同的RAM中.因此在汇编程序中交替访问C变量和汇编程序中定义的symbol时,每次都要设置DP寄存器的值,才能得到正确的地址.在C程序中也可以访问汇编程序中定义的变量和常量.下例中在汇编的.bss段将var说明为global的(下划线表示是C变量)在C中将其说明为extern的就可以访问该变量.asm program:.bss -v ar,1.global-var......C proram:extern int var;var=1;......在C程序中访问汇编程序中定义的常量则与访问汇编变量不同.汇编变量在符号表(symbol table)中存放的是该变量的存储地址,而对于常量符号表中存放的是该常量的值.编译器无法区分符号表中哪一个是地址,哪一个是值.若在C中直接读汇编常量(by name),则编译器将该常量的值当作地址再去读对应的存储单元的值.为了避免这种错误,可在C中使用取地址符号(&)得到汇编常量的地址.若-x为汇编常量,在C中用&x 获得x的值.下面程序中在汇编程序中定义了长度为1000的常数表table-size,并将其声明为global型的.在C程序中借助强制类型转换(cast)获得其地址并赋给T ABLE-SIZE.asm program:-table-size .set 1000.global-table-size ......C proram:extern int table-size;#define T ABLE-SIZE((int)(&table-size))for(int=0;i<T ABLE-SIZE;i++) ......TI浮点DSP C3x/4x的C编译器支持ANSI C 的int型及float等数据类型,但应注意与PC机WI NDOWS或DOS系统下C的对应的数据类型含义并不完全相同.C3x存储器宽度为32位,char、short、int及long型均为32位,而且只占一个存储单元.float型和double等价,也各占一个存储单元.而在PC机中,由于存储器的宽度为8位,不同数据类型占据的存储单元数不相同.ANSI C的操作符sizeof可以测出一个数据类型所占的存储单元数.例如,若int为16位整数,则sizeof(int)= 2.而在C3x的C中sizeof(int)= 1.因此,在DSP 与PC机之间交换数据时,应注意数据类型的含义不同引起的存储区别.通过仿真器可以利用C 的文件操作函数对主机的文件进行读写.例如,利用这种方式可以从主机读取图像文件,读取bm p 文件的文件头BIT M APFI LEHE ADER结构和BIT M API NFOHE ADER结构时,由于bm p文件的文件头包含不同的数据类型,赋给DSP中相应的C 变量时,应将若干个字节合并在一起.例如, BIT M APFI LEHE ADER的前两个字节为W ORD型76第3期 齐国清,等:线阵CC D高速图像采集与处理系统 b fT ype ,其后的4个字节为DW ORD 型b fSize.利用下面方法可以将从打开文件中读进的前两个字节合并一起赋给变量b fT ype ,其后4个字节赋给变量b fSize.BIT M APFI LEHE ADER b f ;char tem p2[2];char tem p4[4];.........fpi =fopen (“c :\c33test \bm ptest \test.bm p ”,“rb +”);fread (tem p2,1,2,fpi );b f.b fT ype =tem p2[0]+(tem p2[1]<<8);fread (tem p4,1,4,fpi );b f.b fSize =tem p4[0]+(tem p4[1]<<8)+(tem p4[2]<<16)+(tem p4[3]<<24);.........C 程序调用汇编函数时有两种不同的参数传递方式,即寄存器方式和栈方式.C 编译器的默认方式为栈方式.在栈方式下,实时运行支持库可选rts30.lib ,若采用寄存器参数传递参数方式,则实时运行支持库应选rts30r.lib ,而且编译选项中的运行模式选项应选-mr.C3x 的linker 生成的目标文件(.out 文件)是C OFF 格式的,在仿真状态下可直接将.out 文件加载到DSP 内部RAM 或目标板上的SRAM.若要将程序固化到EPROM 或F LASH ,则由于常用的E 2PROM 编程器不接受C OFF 格式文件,需利用TI 提供的格式转换工具hex30将其转换成常用的hex 格式.固化程序中需提供程序的入口地址,即加载后程序运行的开始地址.对于C 代码,程序的入口地址为-c -int00,-c -int00的地址可以在连接时生成的map 文件中找到,并在运行hex30时在命令行用-e 选项提供给格式转换工具.运行hex30时还需要由一个cmd 文件提供总线控制寄存器控制字、ROM 芯片宽度、存储器字宽度等参数.3 结束语本文介绍了为铁路轨道缺陷视频检测系统开发的线阵CC D 图像采集与处理设备该系统利用TI 的浮点DSP -T MS320VC33实现了对BA LSER 公司线阵CC D -L101输出数据的采集与处理.在实际应用中,由于要求进行连续采集与处理,因此一个DSP 不能满足要求.在实验中.我们采用了两个DSP 并行工作的方式,实现了图像的连续采集与处理.若物体运动速度更快或图像处理算法更复杂时则采用更多个DSP 并行处理,或采用性能更强的DSP ,如TI 的64x 系列DSP.参 考 文 献:[1]柴雪松,杨凤春,罗 林.轨道视频检查系统[J ].中国铁路,2001(6),59260.[2]BA LSER L100b Series User ’s Manual[Z].Basler Vision T echnologies ,2001.[3]T MS320C3x User ’s G uide[Z].T exas Instruments Incorporated ,1997.Line scan CCD high speed image acquisition and processing systemQI G uo 2qing 1,HU X iao 2chu 2(rmation Technol.College ,Dalian Maritime Univ.,Dailan 116026,China ;2.Dalian C onstruction Eng.G roup C o.Ltd.,Dalian 116001,China )Abstract :An image acquisition and processing system designed for rail track flaw detection is presented.The system em ploys line scan CC D to acquire the clear image of the rail track surface under high speed m oving condition.The image data are trans ferred to the acquisition board in Camera Link format and the board receives the image data with National Semiconductor ’s line receiver DS90CR288.The image processing system is based on TI ’s floating -point DSP T MS320VC33.S oftware development techniques using TI ’s C ode C om poser with C and assembly language are als o discussed.K ey w ords :line scan CC D ;image acquisition ;rail track flaw detection ;digital signal process or86 大连海事大学学报 第30卷 。

高速公路信息采集与处理技术研究随着社会和经济的发展,交通路网的建设不断扩大和提升。
其中高速公路的建设已经成为现代化交通网络建设的重要组成部分。
高速公路具有安全、快速、舒适等优点,是人们出行的首选交通方式。
为了满足人们对于高速公路行车安全与畅通的需求,信息技术在高速公路信息采集与处理方面的应用也不断推进,其意义重大。
一、高速公路信息采集技术信息采集是高速公路收集车辆运行状态和交通情况的基础,是智能交通系统运作的核心。
在高速公路上,信息采集技术应包括实时车流数采集、车速和密度采集、重载运输车辆数量采集、爆胎和撞击事故采集、违法行为采集等。
1.实时车流数采集技术实时车流数采集技术是通过调配采集设备,对车道内车辆进行实时车流数采集,以实现车流数实时监测和车辆通行速度、拥堵情况信息的采集。
车流量监测系统主要利用车流量检测器、地磁线圈、光电传感器和微波探测等技术手段,通过非接触、无感、无损和高精度等采集车辆数目和位置信息,可实现对车道内车辆进行实时的监测和计算。
2.车速和密度采集技术车速和密度采集技术是在实时车流数采集技术的基础上,衍生出的一种车辆信息采集技术,用于采集车辆通行速度和密度信息,并对车载GPS导航进行升级,利用手机APP等方式,提供车辆通行状态、路段拥堵情况和预测等信息。
3.重载运输车辆数量采集技术重载运输车辆数量采集技术是一种针对国道公路、高速公路等重载运输车辆密集路段的信息采集技术,可直观地为过路车辆提供当前高速公路通行情况。
采集技术一般采用图像识别、车牌识别技术、视频监控技术等,其数据可具有自动上传、存储、显示等功能。
4.爆胎、撞击事故信息采集技术爆胎和撞击事故信息采集技术主要是针对高速公路上由于轮胎爆炸、疲劳驾驶、刹车故障、侧翻等原因导致的路面事故进行信息采集和传递,信息采集技术一般为图像识别技术和视频监控技术。
5.违法行为信息采集技术违法行为信息采集技术是指利用卡口、视频监控、电子警察等黑科技手段,对高速公路上不遵守交通规则行为的车辆、驾驶人员等信息进行采集,以保证道路交通安全。

图像的采集和处理课程设计一、课程目标知识目标:1. 让学生了解图像采集的基本原理和常见设备,掌握图像处理的基础知识。
2. 使学生掌握图像处理软件的基本操作,能对图像进行简单的编辑和调整。
3. 帮助学生理解图像处理技术在日常生活中的应用和价值。
技能目标:1. 培养学生运用图像采集设备进行拍摄的能力,提高拍摄技巧。
2. 培养学生运用图像处理软件对图像进行编辑、修复和美化的能力。
3. 培养学生独立分析图像问题,提出解决方案并实施的能力。
情感态度价值观目标:1. 培养学生对图像艺术的欣赏能力和审美情趣,提高对美的追求。
2. 增强学生的团队协作意识,培养在图像处理过程中的沟通与交流能力。
3. 培养学生遵守图像使用规范,尊重他人版权,树立正确的价值观。
本课程针对初中年级学生,结合学科特点,注重理论知识与实践操作的相结合。
在教学过程中,关注学生的个体差异,充分调动学生的积极性,引导他们主动探索、实践和创新。
通过本课程的学习,使学生能够掌握图像采集和处理的基本技能,培养他们在实际生活中的应用能力,同时提高学生的审美素养和团队协作能力。
二、教学内容1. 图像采集原理与设备:介绍图像采集的基本原理,包括光学成像、数字成像等;讲解常见图像采集设备的使用方法和注意事项。
- 教材章节:第一章,图像采集与处理概述- 内容列举:光学成像原理、数字成像原理、摄像头、扫描仪等设备的使用。
2. 图像处理基础知识:讲解图像处理的基本概念,如像素、分辨率、图像格式等;介绍图像处理软件的基本功能。
- 教材章节:第二章,图像处理基础知识- 内容列举:像素、分辨率、图像格式、Photoshop等图像处理软件的基本操作。
3. 图像编辑与调整:教授图像处理软件中的基本工具和功能,如裁剪、旋转、色彩调整、滤镜等。
- 教材章节:第三章,图像编辑与调整- 内容列举:裁剪、旋转、色彩平衡、亮度对比度调整、滤镜应用。
4. 图像处理技术应用:分析图像处理技术在日常生活、艺术创作、科学研究等领域的应用。
唐红雨陈迅随着科学技术的高速发展,图像数字化处理的应用领域也越来越广泛。
数据量大是图像数据的一大特点,数据传输速率高是其另一个特点,特别是对于一些转瞬即逝的图像信息,常规的软件不能及时处理,因此必须要采用硬件设备来加速图像处理过程。
DSP近些年来发展迅速,它具有一系列优点使得高速图像处理系统广泛采用DSP来实现。
本系统的核心器件为DSP和可编程器件CPLD:CPLD在系统中主要用于控制方面,而DSP主要用来进行图像数据的处理。
硬件部分是系统的一个重要部分,硬件电路中器件的选择以及器件的功能和特性,尤其是器件的速度、稳定性、功耗等直接影响着系统实时性的实现以及它的性能。
TMS320C5410芯片特点数字信号处理器是利用专门或通用的数字信号处理芯片以数字计算的方法对信号进行处理,具有处理速度快、精确、抗干扰能力强及可靠性高等优点,满足对信号实时处理及控制的要求。
本系统中采用的DSP芯片是美国德州仪器公司推出的定点数字信号处理芯片TMS320C5410,它具有改进的哈佛结构,丰富的指令集、较大的存贮空间和较快的运算速度,多流水线操作等优点,广泛用于图像处理、语音分析、通信工程等领域。
在DSP处理中,频率为40MHz的晶振接到C5410的X2/CLKIN引脚(X1空着不接),则C5410内部的机器周期约为25ns,当外部存储器的存取时间小于25ns时,C5410可进行零等待的存取。
C54x内部的相同步逻辑PLL(PhaseLockedLogic)兼有频率放大和信号提纯的功能,用高稳定的参考振荡器锁定,可以提供高稳定的频率源。
所以,C54x的外部频率源的频率可以比CPU的机器周期CLKOUT的速率低,这样就能降低因高速开关时钟所造成的高频噪声。
系统硬件设计如图1所示,DSP之前的硬件处理是一个视频图像的采集过程,图像数据具体处理的实现是在DSP中进行的。
视频图像信号经摄像头输入后,分两路进行视频预处理和信号放大。