软件冗余的原理和配置
- 格式:pdf
- 大小:491.88 KB
- 文档页数:15
从字面上讲,也就是实现的方式上:1)软冗余是通过软件实现,也就是是西门子的SWR软件包;硬冗余,则是使用CPU417H;414H;412H来实现,对于PLC 本身的操作系统及硬件设置上均不同,硬冗余的同步机理为事件同步。
2)硬冗余的两个热备系统必须使用相同的PLC;软冗余的两个暖被系统可以使用不同的PLC。
3)硬冗余的同步链路采用同步模块和光纤,有长距,短距两种;软冗余则使用MPI,DP(CP343-5,CP443-5)和IE(CP343-1,CP443-1),程序内部调用的是xsend/xrcv;AGsend/rcv以及Bsend/rcv(仅对400),这也就是为什么S7-300 PN CPU 无法使用集成PN口来实现同步的原因。
从性能上来:1)冗余的层级:软冗余无法进行IO冗余;IO冗余仅能在硬冗余里实现。
此外,Y-link仅能在硬冗余中实现。
2)系统切换的时间:硬冗余:PLC无切换时间,因为程序同时在两个CPU里运行,硬冗余里成为主动切换;被动切换,也就是从站切换的时间<100ms;对于软冗余,冗余程序仅在主CPU内执行,备用CPU仅执行非冗余段程序,切换时为整个系统的切换。
切换时间取决于同步链路的类型,速率和同步数据量的大小,DP从站的多少,多为秒级。
对于切换,软冗余系统中,DP从站的接口模板或DP链路故障均会造成主备CPU的切换,而引起整个系统的切换;而在硬冗余中,从站的故障不会造成主备CPU的切换。
3)信息的丢失:2)提到了切换,很自然的,CPU间的切换可能导致部分信息,如报警的丢失,因为报警在当前激活的主CPU 中进行处理。
所以,软冗余系统中会存在信息的丢失;而硬冗余系统中,由于CPU间为事件同步的方式,且切换无时间,保证了信息不会丢失,也就是硬冗余中所说的平滑切换。
4)通信架构:400H系统与上位机间的通信有多种架构,需要使用CP1613和redconnect实现,网络构成方式:双通道,四通道,单环,双环等;400H间建立的是容错S7连接。
高可靠性是过程控制系统的第一要求。
冗余技术是计算机系统可靠性设计中常采用的一种技术,是提高计算机系统可靠性的最有效方法之一。
为了达到高可靠性和低失效率相统一的目的,我们通常会在控制系统的设计和应用中采用冗余技术。
合理的冗余设计将大大提高系统的可靠性,但是同时也增加了系统的复杂度和设计的难度,应用冗余配置的系统还增加了用户投资。
因此,如何合理而有效的进行控制系统冗余设计,是值得研究的课题。
1:冗余技术冗余技术概要:冗余技术就是增加多余的设备,以保证系统更加可靠、安全地工作。
冗余的分类方法多种多样,按照在系统中所处的位置,冗余可分为元件级、部件级和系统级;按照冗余的程度可分为1:1冗余、1:2冗余、1:n冗余等多种。
在当前元器件可靠性不断提高的情况下,和其它形式的冗余方式相比,1:1的部件级热冗余是一种有效而又相对简单、配置灵活的冗余技术实现方式,如I/O卡件冗余、电源冗余、主控制器冗余等。
因此,目前国内外主流的过程控制系统中大多采用了这种方式。
当然,在某些局部设计中也有采用元件级或多种冗余方式组合的成功范例。
控制系统冗余设计的目的:系统运行不受局部故障的影响,而且故障部件的维护对整个系统的功能实现没有影响,并可以实现在线维护,使故障部件得到及时的修复。
冗余设计会增加系统设计的难度,冗余配置会增加用户系统的投资,但这种投资换来了系统的可靠性,它提高了整个用户系统的平均无故障时间(MTBF),缩短了平均故障修复时间(MTTR),因此,应用在重要场合的控制系统,冗余是非常必要的。
二个部件组成的并联系统(互为冗余)与单部件相比,平均无故障时间是原来的1.5倍。
系统的可用性指标可以用两个参数进行简单的描述,一个是平均无故障时间(MTBF),另一个是平均修复时间(MTBR)。
系统的可用性可用下式表示:系统可用性=MTBF/(MTBF+MTBR)当可用性达到99.999%时,系统每年停止服务的时间只有6分钟。
2:控制系统冗余的关键技术冗余是一种高级的可靠性设计技术,?1:1热冗余也就是所谓的双重化,是其中一种有效的冗余方式,但它并不是两个部件简单的并联运行,而是需要硬件、软件、通讯等协同工作来实现。
冗余网络配置实验报告冗余网络配置实验是网络工程中一种重要的设计和实施手段,旨在提高网络的可靠性和稳定性。
本文将从网络冗余的原理、冗余网络的常见形式、实验过程和结果分析等方面进行详细论述。
一、冗余网络的原理冗余网络是通过在网络中增加冗余路径,以提高网络的可靠性和稳定性。
冗余路径即备用路径,当主路径出现故障时,备用路径能够接替主路径的功能,保证网络的连通性。
冗余网络的基本原理是采用备份路径,将网络流量在不同的路径上进行传输,提高了网络的容错能力,减少网络发生故障时网络中断的可能性。
二、冗余网络的常见形式冗余网络可以采用多种形式来实现,常见的几种形式包括:主备式、主主式、冗余链式和冗余环状式。
1. 主备式:主备式是指在网络中设置主路径和备用路径,当主路径发生故障时,备用路径可以接替主路径的功能。
主备式可以简单实现,但是备用路径的利用率较低,效率较低。
2. 主主式:主主式是指设置多个主路径,当其中一个主路径发生故障时,其他主路径可以继续工作。
主主式可以提高网络的可用性,但是配置和管理复杂度较高。
3. 冗余链式:冗余链式是指设置多个路径形成链式结构,当其中一条路径故障时,链式结构中的其他路径可以继续进行数据传输。
冗余链式相对简单,但是链式中的每条路径都是关键路径,一旦出现故障会导致整个链式中断。
4. 冗余环状式:冗余环状式是指设置多个路径形成环状结构,当环状结构中的一条路径故障时,其他路径可以绕过故障路径继续进行数据传输。
冗余环状式相对复杂,但是具有良好的容错能力和高利用率。
三、冗余网络的实验过程本次实验的目的是验证冗余网络对网络可靠性和稳定性的提升效果,实验过程如下:1. 实验准备:准备实验所需要的网络设备和材料,并确保设备的正常运行状态。
2. 实验拓扑设计:根据实验要求,设计适合的网络拓扑结构。
可以选择主备式、主主式、冗余链式或冗余环状式等形式。
3. 网络配置:根据拓扑结构,配置网络设备的相关参数和路径设置。
冗余设计的控制原理冗余设计的控制原理可以概括以下几个方面:一、冗余设计的基本概念冗余设计是指在系统中增加额外的组成部件或功能单元,使系统总体功能不因局部元件失效而丧失。
当某一部件发生故障时,其余部件可以替代其工作,以维持系统正常运行。
二、冗余设计的分类1. 硬件冗余:指复制关键硬件模块,如双机热备、多路传感等。
2. 软件冗余:利用不同的软件版本执行相同功能,并互相监控,如多版本编程。
3. 信息冗余:利用编码、校验等方法增加额外检错信息,如汉明码等。
4. 时间冗余:允许系统有额外时间用来检测错误并恢复,如系统重启等。
5. 算法冗余:使用两个或多个不同算法并行处理,后比较结果。
三、冗余控制的主要方法1. 主备冗余控制:两个控制器并联,同时接收信号,同时处理,正常使用主系统输出,备用作为热备。
2. 平均冗余控制:多个控制器采用投票方式决定输出值,按平均值或多数决策则输出。
3. 交叉监控:N个控制器两两间成对监控,任一控制器失效其他的可检测并切断故障线路。
4. 动态冗余控制:备用模块在线检测功能,确保可随时切换替代发生故障的主模块。
四、冗余控制设计的主要内容1. 确定采用主备冗余还是多模块平行冗余。
2. 设计模块间信息交换方式、切换判断逻辑。
3. 设置冗余程度,模块数量的选择。
4. 模块硬件电路设计,确保兼容互换。
5. 编写故障检测、状态监控、动态切换的控制软件。
6. 模块间切换的稳定性分析。
7. 冗余控制的可靠性评估。
五、冗余控制的主要优点1. 提高了系统的可靠性、可用性。
2. 增强了系统容错能力和抗风险能力。
3. 避免了单点故障引起的整体失效。
4. 允许线上维修更换,不中断任务执行。
5. 提高了系统的安全性和事故容忍度。
6. 延长了系统的寿命,降低维护成本。
冗余设计已广泛应用于工业控制、交通运输、计算机、通信等领域,是一个行之有效的Fault Tolerance策略,可以显著提升系统可靠性。
VRRP的工作原理及应用简介虚拟路由冗余协议(VRRP,Virtual Router Redundancy Protocol)是一种基于路由器冗余的协议,用于实现网络设备的冗余和容错。
VRRP可以保证网络设备之间的高可用性,当其中一台网络设备发生故障时,其他备用设备能够接管其工作,保证网络的正常运行。
本文将介绍VRRP的工作原理及应用。
工作原理VRRP工作原理基于一主多备的模式。
在这种模式下,有一台路由器被选举为虚拟路由器的主机,其他路由器则作为备份路由器。
主机和备份路由器通过特定的VRRP报文进行通信,以确保网络冗余。
VRRP的工作原理如下:1.主机通过发送VRRP通告报文来宣告自己是主机,并提供虚拟路由器的IP地址。
2.备份路由器通过监听网络上的VRRP通告报文来发现主机,并了解虚拟路由器的IP地址。
3.备份路由器通过发送VRRP通告报文来宣告自己是备份路由器,并提供与主机相同的虚拟路由器的IP地址。
4.主机和备份路由器之间周期性地交换VRRP通告报文,以保持联系,并确定主机的存活状态。
当网络中的主机发生故障时,备份路由器中的VRRP路由器将接管主机的工作。
它将广播一个新的VRRP通告报文,将自己声明为新的主机,并继续提供虚拟路由器的服务。
其他备份路由器将更新它们的路由表以指向新的主机,从而确保网络流量的正常传输。
应用场景VRRP广泛应用于许多网络场景,以提供高可用性和冗余:1.企业网络:VRRP可以用于企业内部的局域网冗余,保证内部网络的稳定和可靠性。
2.数据中心:在数据中心中,VRRP可以用于确保关键服务器、网络设备和存储设备的冗余和容错。
3.云计算环境:VRRP在云计算环境中也有广泛应用,确保虚拟机和云服务的高可用性。
4.ISP网络:互联网服务提供商(ISP)可以使用VRRP提供冗余的边界路由器,确保网络连接的不间断和稳定。
总之,VRRP是一种可靠且灵活的网络协议,可以在各种网络环境中提供高可用性和冗余的解决方案。

PLC系统软件冗余的说明与实现朱震忠SIEMENS A&D CS2004-04-06首先我们建议您访问siemens A&D公司的技术支持网站:www4.ad.siemens.de在检索窗口中键入相关产品或问题的 关键字,获取关于产品或问题的详细信息和手册。
图1软件冗余基本信息介绍软件冗余是Siemens实现冗余功能的一种低成本解决方案,可以应用于对主备系统切换时间要求不高的控制系统中。
A.系统结构Siemens软件冗余系统的软件、硬件包括:1套STEP7编程软件(V5.x)加软冗余软件包(V1.x);2套PLC控制器及I/O模块,可以是S7-300或S7-400系统;3条通讯链路,主系统与从站通讯链路(PROFIBUS 1)、备用系统与从站通讯链路(PROFIBUS 2)、主系统与备用系统的数据同步通讯链路(MPI 或 PROFIBUS 或 Ethernet);若干个ET200M从站,每个从站包括2个IM153-2接口模块和若干个I/O模块;除此之外,还需要一些相关的附件,用于编程和上位机监控的PC-Adapter(连接在计算机串口)或CP5611(插在主板上的PCI槽上)或CP5511(插在笔记本的PCMIA槽里)、PROFIBUS电缆、PROFIBUS总线链接器等;下图说明了软冗余系统的基本结构:图2可以看出,系统是由两套独立的S7-300或S7-400 PLC系统组成,软冗余能够实现:I. 主机架电源、背板总线等冗余;II. PLC处理器冗余;III. PROFIBUS现场总线网络冗余(包括通讯接口、总线接头、总线电缆的冗余);IV. ET200M站的通讯接口模块IM153-2冗余。
软冗余系统由A和B两套PLC控制系统组成。
开始时,A系统为主,B系统为备用,当主系统A中的任何一个组件出错,控制任务会自动切换到备用系统B当中执行,这时,B系统为主,A系统为备用,这种切换过程是包括电源、CPU、通讯电缆和IM153接口模块的整体切换。
ethercat冗余原理EtherCAT(Ethernet for Control Automation Technology)是一种用于工业自动化领域的实时以太网通信协议。
冗余原理在EtherCAT系统中起着至关重要的作用,它能够提高系统的可靠性和稳定性,确保数据的实时性和准确性。
在EtherCAT系统中,冗余原理主要体现在网络通信的可靠性和节点的冗余配置上。
首先,EtherCAT系统采用了冗余网络拓扑结构,即多个EtherCAT从站通过冗余的EtherCAT主站进行通信。
这种冗余结构可以确保当一个主站发生故障时,其他主站可以接管通信任务,从而实现无间断的数据传输。
而且,EtherCAT还支持多个主站同时操作,从而进一步提高了系统的可靠性。
EtherCAT系统中的节点也可以实现冗余配置。
每个EtherCAT从站都可以配置多个冗余从站,这些冗余从站与主站进行通信,以备份主要从站的功能。
当主要从站发生故障或失效时,冗余从站会立即接管其任务,确保系统的连续运行。
这种冗余配置可以大大降低因节点故障引起的系统中断和数据丢失的风险,提高系统的可靠性和稳定性。
EtherCAT还具备自动检测和处理故障的能力。
当网络中的某个节点发生故障时,EtherCAT系统会自动检测并标记该节点为故障状态,同时通知其他节点进行相应的处理。
主站会自动调整通信周期,确保数据的实时性和准确性。
这种自动故障检测和处理的能力可以大大简化系统维护的工作量,提高系统的可维护性和稳定性。
总结起来,EtherCAT冗余原理在工业自动化领域的应用具有重要意义。
通过采用冗余网络拓扑结构和节点冗余配置,可以有效提高系统的可靠性和稳定性,减少因节点故障引起的系统中断和数据丢失的风险。
同时,EtherCAT还具备自动检测和处理故障的能力,简化了系统维护的工作量。
在工业自动化应用中,冗余原理是确保系统稳定运行的重要保障,为工业生产提供了可靠的通信和控制基础。
路由器冗余技术与配置路由器作为网络中的重要设备,承担着网络数据的传输和路由选择的功能。
然而,在日常的网络运维中,路由器的故障问题时有发生,这无疑会对整个网络的正常运行产生重大影响。
因此,为了提高网络的可靠性和稳定性,冗余技术成为了重要的解决方案之一。
本文将介绍路由器冗余技术,并详细说明其配置方法。
一、冗余技术的概念与作用冗余技术是指通过设置冗余设备或冗余路径,以实现在主设备或主路径发生故障时,能够无缝切换到备设备或备路径上,从而保证网络的持续运行。
它能够提高网络的可用性和可靠性,减少故障对网络的影响。
冗余技术主要包括设备冗余和路径冗余两种方式。
设备冗余是通过增加备用设备,在主设备故障时切换到备用设备上,保证网络的连续性。
路径冗余则是通过设置备用路径,在主路径故障时自动选用备用路径进行数据传输。
二、冗余技术的种类与原理1. 设备冗余技术设备冗余技术常用的方法有备份路由器、热备插卡和热备服务器。
备份路由器是在主路由器故障时,自动切换到备用路由器上,保证网络的连通性。
热备插卡则是在主插卡发生故障时,自动切换到备用插卡上,实现设备级别的冗余。
热备服务器则是在主服务器故障时,自动切换到备用服务器上,确保服务的可用性。
2. 路径冗余技术路径冗余技术主要包括静态路由冗余和动态路由冗余。
静态路由冗余是通过手动配置多条路由路径,当主路径故障时,手动切换到备用路径上。
而动态路由冗余是通过路由协议自动选择最佳路径,当主路径出现故障时,自动切换到备用路径。
三、路由器冗余的配置方法1. 设备冗余的配置设备冗余的配置主要涉及备份路由器、热备插卡和热备服务器。
在配置备份路由器时,需要设置主备路由器之间的同步机制,确保数据的一致性。
热备插卡的配置需要进行硬件级别的设置,以实现在主插卡故障时自动切换到备用插卡。
而热备服务器的配置则需要进行软件级别的设置,确保在主服务器故障时能够及时切换到备用服务器。
2. 路径冗余的配置路径冗余的配置主要涉及静态路由冗余和动态路由冗余。
7.1 软件冗余基本信息介绍软件冗余是Siemens实现冗余功能的一种低成本解决方案,可以应用于对主备系统切换时间为秒级的控制系统中。
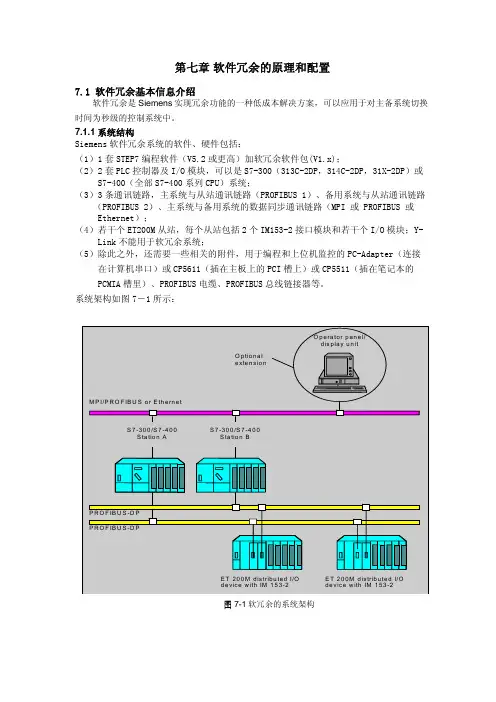
7.1.1系统结构Siemens软件冗余系统的软件、硬件包括:(1)1套STEP7编程软件(V5.2或更高)加软冗余软件包(V1.x);(2)2套PLC控制器及I/O模块,可以是S7-300(313C-2DP,314C-2DP,31X-2DP)或S7-400(全部S7-400系列CPU)系统;(3)3条通讯链路,主系统与从站通讯链路(PROFIBUS 1)、备用系统与从站通讯链路(PROFIBUS 2)、主系统与备用系统的数据同步通讯链路(MPI 或PROFIBUS 或Ethernet);(4)若干个ET200M从站,每个从站包括2个IM153-2接口模块和若干个I/O模块;Y-Link 不能用于软冗余系统;(5)除此之外,还需要一些相关的附件,用于编程和上位机监控的PC-Adapter(连接在计算机串口)或CP5611(插在主板上的PCI槽上)或CP5511(插在笔记本的PCMIA槽里)、PROFIBUS电缆、PROFIBUS总线链接器等。
系统架构如图7-1所示:图7-1软冗余的系统架构可以看出,系统是由两套独立的S7-300或S7-400 PLC系统组成,软冗余能够实现:主机架电源、背板总线等冗余;PLC处理器冗余;PROFIBUS现场总线网络冗余(包括通讯接口、总线接头、总线电缆的冗余);ET200M站的通讯接口模块IM153-2冗余。
软冗余系统由A和B两套PLC控制系统组成。
开始时,A系统为主,B系统为备用,当主系统A中的任何一个组件出错,控制任务会自动切换到备用系统B当中执行,这时,B系统为主,A系统为备用,这种切换过程是包括电源、CPU、通讯电缆和IM153接口模块的整体切换。
系统运行过程中,即使没有任何组件出错,操作人员也可以通过设定控制字,实现手动的主备系统切换,这种手动切换过程,对于控制系统的软硬件调整,更换,扩容非常有用,即Altering Configuration and Application Program in RUN Mode 。
本文以ControlLogix为例,介绍了可编程控制器冗余系统的冗余原理,对影响冗余性能的关键问题进行了分析,通过减少扫描周期和切换时间来对其冗余性能进行优化,为类似冗余系统的性能优化提供的参考方法。
随着制造业竞争的加剧,制造商更加追求生产设备的可靠性,尤其是那些控制关键性生产工序的设备,往往需要采用冗余配置。
目前,多数的基于可编程控制器的冗余系统采用了两套CPU处理器模块,一个处理器模块作为主处理器,另外一个作为从处理器。
正常情况下,由主处理器执行程序,控制I/O 设备,从处理器不断监测主处理器状态。
如果主处理器出现故障,从处理器立即接管对I/O的控制,继续执行程序,从而实现对系统的冗余控制。
很多厂商都能够提供可编程控制器冗余系统解决方案,用户在使用过程中往往对其冗余原理理解不深,造成系统冗余性能下降。
本文以罗克韦尔自动化Allen Bradley品牌ControlLogix控制器为例,介绍其冗余系统的构建和性能优化问题。
2 冗余系统构建ControlLogix系统采用了基于“生产者/消费者”的通讯模式,为用户提供了高性能、高可靠性、配置灵活的分布式控制解决方案。
ControlLogix系统实现了离散、过程、运动三种不同控制类型的集成,能够支持以太网、ControlNet控制网和DeviceNet设备网,并可实现信息在三层网络之间的无缝传递。
因而,ControlLogix被广泛地应用于各种控制系统。
【1】构建ControlLogix 冗余系统的核心部件是处理器和1757-SRM冗余模块。
目前,有1756-L55系列处理器模块支持冗余功能,其内存容量从750KB到7.5MB不等。
1757-SRM冗余模块是实现冗余功能的关键。
如图1所示,在冗余系统中,处理器模块和1757-SRM冗余模块处于同一机架内。
为了避免受到外界电磁干扰,提高数据传输速度,两个机架的1757-SRM模块通过光纤交换同步数据。
VRRP协议虚拟路由器冗余协议的工作原理虚拟路由器冗余协议(Virtual Router Redundancy Protocol,简称VRRP)是一种网络协议,用于提供网络设备的冗余,以确保在主设备出现故障时,备用设备可以无缝接管网络的路由功能。
本文将介绍VRRP协议的工作原理及其在网络中的应用。
一、介绍VRRP协议是一种用于网关冗余的网络协议,常用于局域网中的路由器设备。
通过使用VRRP协议,可以将多台路由器设备组成一个虚拟路由器组(VRG),其中一台被选为主设备(Master),其他设备则处于备用状态(Backup)。
主设备负责处理网络数据的转发,备用设备则处于待机状态,对网络流量进行监视。
二、工作原理VRRP协议的工作原理如下:1. 主备选举当虚拟路由器组初始化或主设备发生故障时,VRRP协议通过选举机制从备用设备中选出一个作为新的主设备。
选举过程中,每个备用设备都有一个优先级值,优先级值较高的设备更有可能被选为主设备。
选举的结果会广播给其他设备,以便整个虚拟路由器组中的所有设备都能感知到主备更替的情况。
2. 发送VRRP消息主设备负责发送VRRP消息,向网络中的其他设备宣告自己是虚拟路由器组的主设备。
这些VRRP消息包含了虚拟路由器的IP地址、优先级值以及持续时间等信息。
备用设备会周期性地接收这些VRRP消息,并根据其中的信息更新自己的状态。
3. 监控网络连通性备用设备通过不断监控网络的连通性来确保主备切换的正常运行。
它们会发送ARP请求,并根据收到的ARP响应来判断网络是否正常工作。
如果备用设备在一定时间内没有接收到ARP响应,它将会主动发起选举过程,试图成为虚拟路由器组的新主设备。
4. 主备切换当主设备失效或备用设备监测到网络的异常时,备用设备将会尝试成为新的主设备。
此时,它会发送VRRP消息广播新的主备选举结果,其他设备接收到后更新自己的状态,并将新主设备的MAC地址作为默认网关。
keepalived vrrp原理keepalived是一种用于高可用性的软件,它使用VRRP(Virtual Router Redundancy Protocol)协议来实现路由器的冗余和负载均衡。
本文将详细讨论keepalived VRRP的工作原理,并解释其在构建高可用性网络环境中的应用。
首先,我们需要了解什么是VRRP。
VRRP是一种网络协议,用于在多个路由器之间实现冗余,即一个主路由器和一个或多个备份路由器。
它通过将IP地址分配给一个虚拟路由器来创建冗余。
这样,如果主路由器出现故障,备份路由器可以立即接管虚拟路由器的功能,以确保网络的持续运行。
keepalived是一个用户空间进程,用于监控网络中的服务器,并确保它们的可用性。
它通过VRRP协议与其他keepalived进程通信,实现路由器的冗余和负载均衡。
keepalived的工作原理如下:1. 配置Virtual IP(VIP)和Virtual Router ID(VRID):在keepalived配置文件中,我们需要指定一个VIP和VRID。
VIP 是一个虚拟的IP地址,用于识别虚拟路由器。
VRID用于标识逻辑上相同的虚拟路由器的虚拟路由器组。
2. 发送VRRP通告:一旦keepalived进程启动,它会发送VRRP通告(Advertisement)消息,以通知其他keepalived进程它是活动路由器。
3. 确定Master路由器:当其他keepalived进程接收到VRRP通告消息时,他们将判断消息中的优先级和VRID。
如果接收到的消息中的VRID与本地配置的相同,并且发送消息的优先级较高,那么本地路由器将判断接收到的消息中的优先级,并决定是否切换到备份状态。
4. 选举Master路由器:如果当前的路由器被切换到备份状态,它将参与Master路由器的选举过程。
该过程基于优先级。
优先级越高的路由器将被选举为Master路由器。
如果多个路由器具有相同的优先级,则MAC地址较高的路由器将成为Master。
软冗余第七章软件冗余的原理和配置7。
1软件冗余基本信息介绍软件冗余是Siemen实现冗余功能的一种低成本解决方案,可以应用于对主备系统切换时间为秒级的控制系统中。
7。
1、1系统结构Siemen软件冗余系统的软件、硬件包括:(1)1套STEP7编程软件(V5、2或更高)加软冗余软件包(V1、);(2)2套PLC控制器及I、O模块,可以是S7-300(313C-2DP,314C-2DP,31-2DP)或S7-400(全部S7-400系列CPU)系统;(3)3条通讯链路,主系统与从站通讯链路(PROFIBUS1)、备用系统与从站通讯链路(PROFIBUS2)、主系统与备用系统的数据同步通讯链路(MPI或PROFIBUS或Ethernet);(4)若干个ET200M从站,每个从站包括2个IM153-2接口模块和若干个I、O模块;Y-Link不能用于软冗余系统;(5)除此之外,还需要一些相关的附件,用于编程和上位机监控的PC-Adapter(连接在计算机串口)或CP5611(插在主板上的PCI槽上)或CP5511(插在笔记本的PCMIA槽里)、PROFIBUS电缆、PROFIBUS总线链接器等。
系统架构如图7-1所示:图7-1软冗余的系统架构可以看出,系统是由两套独立的S7-300或S7-400PLC系统组成,软冗余能够实现:主机架电源、背板总线等冗余;PLC处理器冗余;PROFIBUS现场总线网络冗余(包括通讯接口、总线接头、总线电缆的冗余);ET200M站的通讯接口模块IM153-2冗余。
软冗余系统由A和B两套PLC控制系统组成。
开始时,A系统为主,B系统为备用,当主系统A中的任何一个组件出错,控制任务会自动切换到备用系统B当中执行,这时,B系统为主,A系统为备用,这种切换过程是包括电源、CPU、通讯电缆和IM153接口模块的整体切换。
系统运行过程中,即使没有任何组件出错,操作人员也可以通过设定控制字,实现手动的主备系统切换,这种手动切换过程,对于控制系统的软硬件调整,更换,扩容非常有用,即AlteringConfigurationandApplicationPrograminRUNMode7。
服务器容量规划中的容错与冗余设计在服务器容量规划中,容错与冗余设计是至关重要的。
随着企业对服务器的依赖性不断增加,任何服务器故障都可能导致业务中断和数据丢失,严重影响企业的正常运营。
因此,通过容错与冗余设计来提高服务器的可用性和可靠性是非常必要的。
本文将介绍容错与冗余设计的概念、原理和一些常用的设计方案。
一、容错与冗余设计的概念与原理容错与冗余设计是通过添加冗余系统组件来提高服务器的可用性和可靠性。
容错是指系统能够在部分组件发生故障的情况下,仍能够正常工作。
冗余是指系统中存在多个相同或相互备份的组件,当一部分组件发生故障时,可以自动切换到备份组件,保证系统的连续性。
容错与冗余设计的原理是通过将服务器的各个组件进行冗余化,当其中一个组件发生故障时,可以自动切换到备用组件,不影响系统的正常运行。
容错与冗余设计可以分为软件容错和硬件容错两个层面。
在软件容错方面,常用的设计方法包括备份与恢复、检测与恢复以及数据备份与恢复。
通过设立备份服务器、实时监测系统运行状态以及定期备份数据,可以在软件层面实现容错与冗余。
而在硬件容错方面,可以通过使用冗余硬件设备来保障服务器的可用性和可靠性。
常见的冗余硬件设备包括冗余电源、冗余硬盘阵列(RAID)、冗余网络接口卡(NIC)等。
二、常用的容错与冗余设计方案1. 冗余电源为服务器配置冗余电源是保障服务器稳定运行的重要手段。
当主电源发生故障时,备用电源可以自动接管,避免服务器的停机和数据丢失。
冗余电源常用的设计包括双电源设计和备用电源设计。
双电源设计是指服务器配置两个独立的电源输入,当一个电源故障时,另一个电源可以正常供电。
备用电源设计是指服务器配置备用电源模块,当主电源发生故障时,备用电源可以自动接管供电。
2. RAID技术RAID(Redundant Array of Independent Disks)技术是一种磁盘阵列技术,通过将多个硬盘组合成一个逻辑磁盘单元,提高存储系统的容错性和性能。
软件冗余的原理和配置7.1 软件冗余基本信息介绍软件冗余是Siemens实现冗余功能的一种低成本解决方案,可以应用于对主备系统切换时间为秒级的控制系统中。
7.1.1系统结构Siemens软件冗余系统的软件、硬件包括:(1)1套STEP7编程软件(V5.2或更高)加软冗余软件包(V1.x);(2)2套PLC控制器及I/O模块,可以是S7-300(313C-2DP,314C-2DP,31X-2DP)或S7-400(全部S7-400系列CPU)系统;(3)3条通讯链路,主系统与从站通讯链路(PROFIBUS 1)、备用系统与从站通讯链路(PROFIBUS 2)、主系统与备用系统的数据同步通讯链路(MPI 或 PROFIBUS 或 Ethernet);(4)若干个ET200M从站,每个从站包括2个IM153-2接口模块和若干个I/O模块;Y-Link不能用于软冗余系统;(5)除此之外,还需要一些相关的附件,用于编程和上位机监控的PC-Adapter(连接在计算机串口)或CP5611(插在主板上的PCI槽上)或CP5511(插在笔记本的PCMIA槽里)、PROFIBUS电缆、PROFIBUS总线链接器等。
系统架构如图7-1所示:图7-1软冗余的系统架构可以看出,系统是由两套独立的S7-300或S7-400 PLC系统组成,软冗余能够实现: 主机架电源、背板总线等冗余;PLC处理器冗余;PROFIBUS现场总线网络冗余(包括通讯接口、总线接头、总线电缆的冗余);ET200M站的通讯接口模块IM153-2冗余。
软冗余系统由A和B两套PLC控制系统组成。
开始时,A系统为主,B系统为备用,当主系统A中的任何一个组件出错,控制任务会自动切换到备用系统B当中执行,这时,B 系统为主,A系统为备用,这种切换过程是包括电源、CPU、通讯电缆和IM153接口模块的整体切换。
系统运行过程中,即使没有任何组件出错,操作人员也可以通过设定控制字,实现手动的主备系统切换,这种手动切换过程,对于控制系统的软硬件调整,更换,扩容非常有用,即Altering Configuration and Application Program in RUN Mode 。
7.1.2 系统工作原理在软冗余系统进行工作时,A、B控制系统(处理器,通讯、I/O)独立运行,由主系统的PLC掌握对ET200从站中的I/O控制权。
A、B系统中的PLC程序由非冗余(non-duplicated)用户程序段和冗余(redundant backup)用户程序段组成,主系统PLC执行全部的用户程序,备用系统PLC只执行非冗余用户程序段,而跳过冗余用户程序段。
软冗余系统内部的运行过程参考图7-2。
图7-2软冗余系统内部的运行过程主系统的CPU将数据同步到备用系统的CPU需要1到几个程序扫描循环,如图7-3所示:图7-3软冗余同步原理数据同步所需要的时间取决于同步数据量的大小和同步所采用的网络方式,MPI方式周期最长,PROFIBUS方式适中,Ethernet网方式最快。
同步通信效率见表7-1表7-1同步通信效率PROFIBUS 网络1.5 Mbaud Ethernet 以太网10 MBaud网络MPI187.5 kBaud每60ms 传送240个字节数据每48ms 传送 240个字节数据每152ms 传送76个字节数据用户需要在初始化程序中(OB100)定义冗余部分的数据区,该数据区可以包括:一个过程映象区(process image area),一个定时器区(IEC timer area),一个计数器区(IEC counter area),一个 位地址区(memory address area)和一个 数据块区(data block area),S7-300同步的最大数据量为8 kBytes,S7-400同步的最大数据量64kBytes。
主备系统的切换时间 = 故障诊断检测时间 + 同步数据传输时间 + DP从站切换时间如果CPU的故障是停机或断电,则故障诊断为大约100-1000毫秒,315-2DP同步1000字节的数据所需的时间大约为200-300ms,8个DP从站的切换时间在100ms左右。
可以在软冗余手册当中找到关于切换时间的具体说明。
无论控制程序循环扫描到哪里,当前激活的系统(即主系统)随时都会接收并处理报警信息,这样,在主系统A与备用系统B进行切换过程中产生的alarm存在被丢失的可能。
7.1.3 产品订货信息软件冗余系统相关产品的订货信息参考表7-2。
表7-2软件冗余系统相关产品的订货信息产品名称订货号描述CPU 系列CPU314C-2DP 6ES7314-6CF00-0AB0CPU313C-2DP 6ES7313-6CE00-0AB0S7-300系列只能够实现软件冗余,CPU 31x-2DP 6ES7 315-2AFxx-0AB06ES7 315-2AG10-0AB06ES7 316-2AGxx-0AB06ES7 318-2AJxx-0AB0无硬件冗余的功能。
CPU 412-1 CPU 412-2 6ES7 412-1XFxx-0AB0 6ES7 412-1FK03-0AB0 6ES7 412-2XGxx-0AB0CPU 413-1 CPU 413-2DP 6ES7 413-1XGxx-0AB0 6ES7 413-2XGxx-0AB0CPU 414-1 CPU 414-2DP CPU 414-3DP 6ES7 414-1XGxx-0AB0 6ES7 414-2XGxx-0AB0 6ES7 414-2XJxx-0AB0 6ES7 414-3XJxx-0AB0CPU 416-1 CPU 416-2DP CPU 416-3DP CPU 417-4 6ES7 416-1XJxx-0AB06ES7 416-2XKxx-0AB06ES7 416-2XLxx-0AB06ES7 416-3XLxx-0AB06ES7 417-4XLxx-0AB0S7-400全系列的CPU都可以应用于软冗余系统;S7-400 H系列的CPU属于硬件冗余方式,相对于软冗余,硬件冗余系统切换速度快,主备CPU中的数据和事件保证完全一致,适于高可靠性应用场合,成本较高CP 通讯处理器系列(数据同步 Redundant-backup link)CP 342-5 PROFIBUS通讯模块6ES7 342-5DA00-0XE0 6GK7 342-5DA02-0XE0CP 343-1 Ethernet 通讯模块6GK7 343-1BA00-0XE0 6GK7 343-1EX11-0XE0CP 443-5 ExtendedPROFIBUS通讯模块6EK7 443-5DXxx-0XE0CP 443-1 ISO Ethernet 通讯模块6EK7 443-1BXxx-0XE0 ET200系列2x DP slave interface IM 153-2 6ES7 153-2AA02-0XB0 6ES7 153-2AB01-0XB0适于ET200M的所有数字量、模拟量 I/O 模板参照S7-300选型样本和STEP 7的硬件组态窗口中ET200文件夹中的I/O模块S7-300 模板手册的下载路径:http://www4.ad.siemens.de/-snm-0135030360-1080199645-0000003727-0000002043-1080729745-enm-WW/view/en/8859629CP 341 6ES7 341-1xH01-0AE0 串口通讯模板FM 350 6ES7 350-1AH0x-0AE0 计数器功能模板相关软件及附件STEP7 编程软件6ES7810-4CC07-0YA5软冗余软件包(SoftwareRedundancy)6ES7862-0AC01-0YA0包括冗余功能块的安装软件和授权PROFIBUS标准电缆6XV1 830-0EH10 按米订货RS485总线连接器6ES7 972-0BA12-0XA0 PROFIBUS网络连接头CP5611通讯卡6GK1 561-1AA00 进行编程和上位机监控的通讯卡注:1) 只有S7-300 315-2DP(除CPU314C-2DP、CPU313C-2DP)型号以上的PLC才支持软冗余功能,所有的S7-400都支持软冗余功能;2) 主系统与备用系统的CPU型号可以不同,如主系统采用一套S7-400系统,而备用系统采用一套S7-300系统;7.2 软件冗余系统的调试过程在计算机上首先安装STEP7 5.x软件和软冗余软件包,软冗余软件光盘包括了冗余功能程序块库、不同系统结构的例子程序和软冗余使用手册。
7.2.1 不同系统结构方式下的功能块:在安装完软冗余的软件后,可以在STEP7当中找到例子程序和功能程序块库,如图7-4所示:图7-4 软件冗余的例子程序以上图7-4显示的是在STEP7中使用OPEN菜单打开软冗余的例子程序,例子程序中采用MPI链路实现数据的同步。
在Libraries找到不同CPU以及不同链接方式下可以使用的功能块,如图7-5所示:图7-5 软件冗余功能块下面的两个表格分别说明了采用S7-300,S7-400进行软件冗余时,可采用的不同网络连接以及所需调用的程序功能块包,参考表7-3和7-4。
表7-3 S7-300进行数据同步使用的程序库 Select this package For this network And this connection type RemarksXSEND_300 MPI Permanently configured connectionNetwork connected to MPIinterface of CPUAG_SEND_300PROFIBUS FDL connection Network connected via CP342-5 Industrial Ethernet ISO connectionNetwork connected via CP345-1表7-4 S7-400进行数据同步使用的程序库 Select this package For this network And this connection type RemarksXSEND_400 MPI Permanently configured connectionNetwork connected to MPIinterface of CPUAG_SEND_400PROFIBUS FDL connection Network connected via CP443-5Industrial Ethernet ISO connection Network connected via CP443-1 BSEND_400 MPI S7 connection Network connected to MPIinterface of CPUPROFIBUS Network connected viaCP 443-5Industrial Ethernet Network connected viaCP 443-1从以上的表格中可以看到,软冗余系统当中可以采用MPI、PROFIBUS、Ethernet 三种网络实现主系统和备用系统之间的数据同步(Redundant-backup link)。